驱动开发,stm32mp157a开发板的led灯控制实验
1.实验目的
编写LED灯的驱动,在应用程序中编写控制LED灯亮灭的代码逻辑实现LED灯功能的控制;
2.LED灯相关寄存器分析
LED1->PE10 LED1亮灭:
RCC寄存器[4]->1 0X50000A28
GPIOE_MODER[21:20]->01 (输出) 0X50006000
GPIOE_ODR[10]->1(输出高电平) 0(输出低电平)0X50006014
LED2->PF10 LED2亮灭:
RCC寄存器[5]->1 0X50000A28
GPIOE_MODER[21:20]->01 (输出) 0X50006000
GPIOE_ODR[10]->1(输出高电平) 0(输出低电平)0X50006014
LED3->PE8 LED3亮灭:
RCC寄存器[4]->1 0X50000A28
GPIOE_MODER[17:16]->01 (输出) 0X50006000
GPIOE_ODR[8]->1(输出高电平) 0(输出低电平)0X50006014
GPIOE_OTYPER默认为00
GPIOE_PUPDR默认为0
GPIOE_OSPEEDR默认为00
3.编写代码
---Makefile---工程管理文件
modname?=demo
arch?=arm
ifeq ($(arch),arm)
KERNELDIR:= /home/ubuntu/FSMP1A/linux-stm32mp-5.10.61-stm32mp-r2-r0/linux-5.10.61 #编译生成ARM架构
else
KERNELDIR:=/lib/modules/$(shell uname -r)/build #编译生成X86架构
endifPWD:=$(shell pwd) #模块化编译文件路径
all:make -C $(KERNELDIR) M=$(PWD) modules
clean:make -C $(KERNELDIR) M=$(PWD) cleanobj-m:=$(modname).o
---head.h---头文件
#ifndef __HEAD_H__
#define __HEAD_H__typedef struct
{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR;
}gpio_t;//LED1和LED3寄存器地址
#define LED1_ADDR 0x50006000
#define LED2_ADDR 0x50007000
#define LED3_ADDR 0x50006000
#define RCC_ADDR 0x50000A28#endif---mychrdev.c---驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include "head.h"
#include<linux/device.h>char kbuf[128] = {0};
unsigned int major;
gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;
unsigned int *vir_rcc;struct class *cls;
struct device *dev;//封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{int ret;if(size > sizeof(kbuf)){size = sizeof(kbuf);}ret = copy_to_user(ubuf,kbuf,size);if(ret){printk("copy_to_user err\n");return -EIO;}return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{unsigned long ret;if(size > sizeof(kbuf)){size = sizeof(kbuf);}ret = copy_from_user(kbuf,ubuf,size);if(ret){printk("copy_from_user err\n"); return -EIO; }switch(kbuf[0]){case '1':if(kbuf[1] == '1') //开灯vir_led1->ODR |= (0x1 << 10);else if(kbuf[1] == '0') //关灯vir_led1->ODR &= (~(0x1 << 10));break;case '2':if(kbuf[1] == '1') //开灯vir_led2->ODR |= (0x1 << 10);else if(kbuf[1] == '0') //关灯vir_led2->ODR &= (~(0x1 << 10));break;case '3':if(kbuf[1] == '1') //开灯vir_led3->ODR |= (0x1 << 8);else if(kbuf[1] == '0') //关灯vir_led3->ODR &= (~(0x1 << 8));break;default:printk("输入错误\n"); }return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}struct file_operations fops={.open=mycdev_open,.read=mycdev_read,.write=mycdev_write,.release=mycdev_close,
};//相关寄存器地址映射及初始化
int all_led_init(void)
{//相关寄存器的内存映射vir_led1=ioremap(LED1_ADDR,sizeof(gpio_t));if(vir_led1 == NULL){printk("物理内存映射失败%d\n",__LINE__);return -ENOMEM;}vir_led2=ioremap(LED2_ADDR,sizeof(gpio_t));if(vir_led2 == NULL){printk("物理内存映射失败%d\n",__LINE__);return -ENOMEM;}vir_led3 = vir_led1;vir_rcc=ioremap(RCC_ADDR,4);if(vir_rcc == NULL){printk("物理内存映射失败%d\n",__LINE__);return -ENOMEM;}printk("寄存器内存映射成功\n");//硬件寄存器的初始化(*vir_rcc) |= (0x3 << 4);//LED1vir_led1->MODER &= (~(0x3 << 20));vir_led1->MODER |= (0x1 << 20);vir_led1->ODR &= (~(0x1 << 10));//LED2vir_led2->MODER &= (~(0x3 << 20));vir_led2->MODER |= (0x1 << 20);vir_led2->ODR &= (~(0x1 << 10));//LED3vir_led3->MODER &= (~(0x3 << 16));vir_led3->MODER |= (0x1 << 16);vir_led3->ODR &= (~(0x1 << 8));printk("寄存器初始化成功\n");return 0;
}//入口函数
static int __init mycdev_init(void)
{major = register_chrdev(0,"mychrdev",&fops);if(major < 0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功:major=%d\n",major);//寄存器映射及初始化all_led_init();//向上提交目录cls = class_create(THIS_MODULE,"mychrdev");if(IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录成功\n");//向上提交设备节点信息int i;for(i=0; i<3; i++){dev = device_create(cls,NULL,MKDEV(major,i),NULL,"mychrdev%d",i);if(IS_ERR(dev)){printk("向上提交设备节点信息失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点信息成功\n");return 0;
}//出口函数
static void __exit mycdev_exit(void)
{//销毁设备节点信息int i;for(i=0; i<3; i++){device_destroy(cls,MKDEV(major,i));}//销毁目录信息class_destroy(cls);//取消物理内存的映射iounmap(vir_led1);iounmap(vir_led2);iounmap(vir_rcc);//字符设备驱动注销unregister_chrdev(major,"mychrdev");
}//声明
//入口函数地址
module_init(mycdev_init);
//出口函数地址
module_exit(mycdev_exit);
//遵循的GPL协议
MODULE_LICENSE("GPL");---test.c---应用程序测试程序
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>int main(int argc,char const *argv[])
{char buf[128]={0};int fd = open("/dev/mychrdev0",O_RDWR);if(fd < 0){printf("设备文件打开失败\n");exit(-1);}while(1){printf("第一个字符:1(LED1) 2(LED2) 3(LED3)\n");printf("第二个字符1(开灯)0(关灯)\n");printf("输入控制灯的两个字符>>> ");fgets(buf,sizeof(buf),stdin);buf[strlen(buf)-1] = '\0';//像设备文件中写write(fd,buf,sizeof(buf));}close(fd);return 0;
}4.测试

相关文章:
驱动开发,stm32mp157a开发板的led灯控制实验
1.实验目的 编写LED灯的驱动,在应用程序中编写控制LED灯亮灭的代码逻辑实现LED灯功能的控制; 2.LED灯相关寄存器分析 LED1->PE10 LED1亮灭: RCC寄存器[4]->1 0X50000A28 GPIOE_MODER[21:20]->01 (输出) 0X50006000 GPIOE_ODR[10]-&g…...

黑客入侵机构,导致2万条信息被卖
近日据厦门日报报道,厦门一教育培训机构遭黑客入侵,2万条职工、学员信息被出售,教培机构被罚。 今年2月底,多名在厦门某教育培训机构学习的学员接到自称是该机构工作人员的电话,对方能准确说出学员的学科信息、缴费情…...
循环购:让消费者和商家共赢的新型电商模式
对于消费者来说,循环购可以让他们享受到优惠价格和高品质商品的同时,还能获得额外的收益和奖励。循环购可以激发消费者的积极性和忠诚度,增加他们对平台的信任和满意度。 对于商家来说,循环购可以让他们节省大量的营销成本和人力…...
分布式缓冲-Redis
个人名片: 博主:酒徒ᝰ. 个人简介:沉醉在酒中,借着一股酒劲,去拼搏一个未来。 本篇励志:三人行,必有我师焉。 本项目基于B站黑马程序员Java《SpringCloud微服务技术栈》,SpringCloud…...

C# 流Stream详解(3)——FileStream源码
【FileStream】 构造函数 如果创建一个FileStream,常见的参数例如路径Path、操作方式FileMode、权限FileAccess。 这里说下FileShare和SafeFileHandle。 我们知道在读取文件时,通常会有两个诉求:一是如何更快的读取文件内容;二…...

C语言的文件操作(炒详解)
⭐回顾回顾文件操作的相关细节⭐ 欢迎大家指正错误 📝在之前的学习中,不管增加数据,减少数据,当程序退出时,所有的数据都会销毁,等下次运行程序时,又要重新输入相关数据,如果一直像这…...
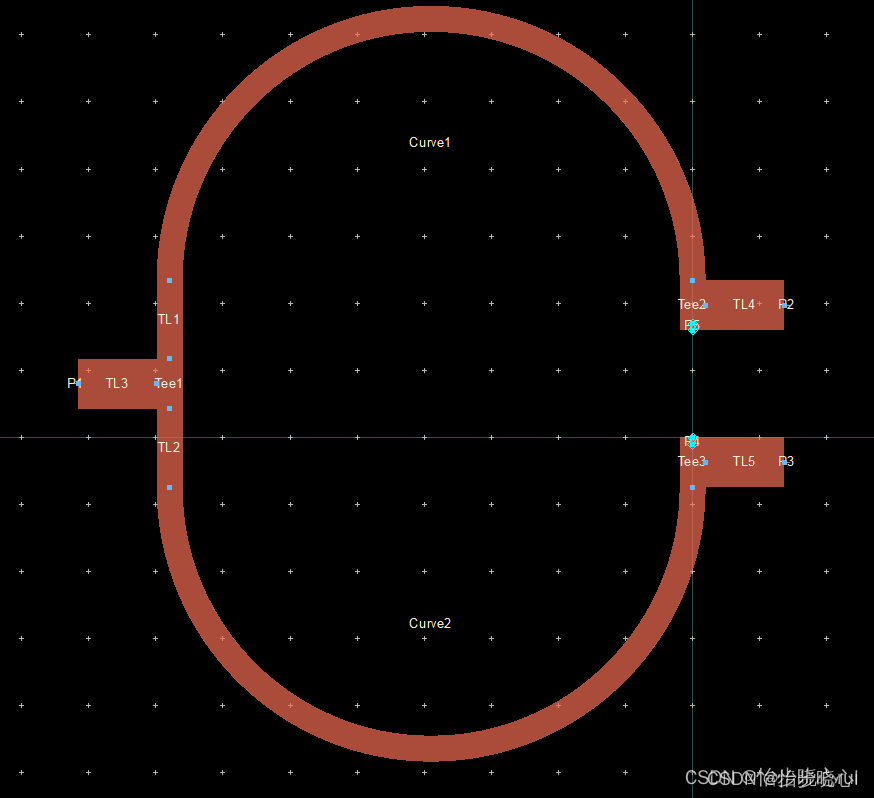
27.基于ADS的不等分威尔金森功分器设计
27.基于ADS的不等分威尔金森功分器设计 等分的威尔金森功分器可以使用ADS非常快速的设计出来,但是不等分的功分器却没有便捷的设计方法,在此给出快速的设计方法与案例,方便大家实际设计。 等分版本的威尔金森功分器设计教程:12、…...

Linux自用命令
sudo su/sudo -i:获取root权限 cd:目录切换 cd / 切换到根目录 cd … 切换到上一级目录 cd ~ 切换到home目录 cd - 切换到上次访问的目录 ls:目录查看 ls 查看当前目录下的所有目录和文件 ls -a 查看当前目录下的所有目录和文件(…...

clickhouse union all之后数据量不一致
环境: clickhouse版本:22.8.16.32 问题:clickhouse使用union all查询结果与每一段sql查询结果只和不一致 原因:因为clickhouse版本问题,官方给出不同的解释 解决方案:将union all的每一段sql用括号括起来…...
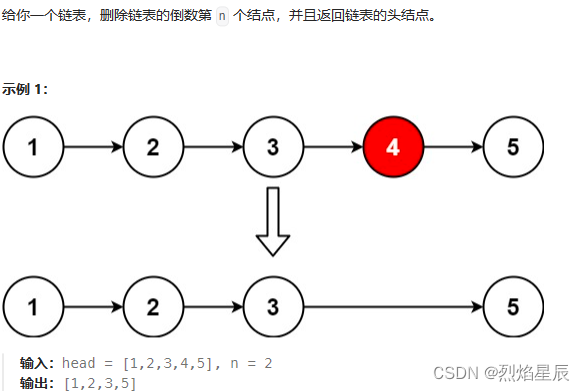
力扣刷题19-删除链表的倒数第N个节点
题目来源 题目描述: class Solution {public ListNode removeNthFromEnd(ListNode head, int n) {//为了删除的格式一样,引入虚拟头节点ListNode dummyNodenew ListNode(1);dummyNode.nexthead;ListNode slowdummyNode;ListNode fastdummyNode;for(int…...

Unity中的简单数据存储办法
这段代码演示了Unity中的简单数据存储办法 当涉及到不同类型的存储时,下面是一些示例代码来演示在Unity中如何使用不同的存储方法: 1. 临时存储示例代码(内存变量): csharp // 定义一个静态变量来存储临时计分 pub…...
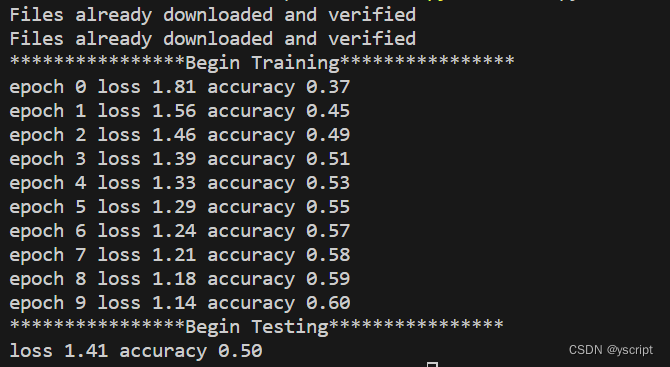
Pytorch-MLP-CIFAR10
文章目录 model.pymain.py参数设置注意事项运行图 model.py import torch.nn as nn import torch.nn.functional as F import torch.nn.init as initclass MLP_cls(nn.Module):def __init__(self,in_dim3*32*32):super(MLP_cls,self).__init__()self.lin1 nn.Linear(in_dim,1…...

SQL2 查询多列
描述 题目:现在运营同学想要用户的设备id对应的性别、年龄和学校的数据,请你取出相应数据 示例:user_profile iddevice_idgenderageuniversityprovince12138male21北京大学Beijing23214male复旦大学Shanghai36543female20北京大学Beijing42…...
)
算法分享三个方面学习方法(做题经验,代码编写经验,比赛经验)
目录 0 . 前言:(遇到OI不要慌)(只要道路对了,就不怕遥远) 1. 做题经验谈 1.1 做题的目的 1.2 我对于算法比赛的题目的看法 1.2.1 类似题 1.2.2 套模型: 1.3 在训练过程中如何做题 1.4 一些建议&…...

爬虫 — 验证码反爬
目录 一、超级鹰二、图片验证模拟登录1、页面分析1.1、模拟用户正常登录流程1.2、识别图片里面的文字 2、代码实现 三、滑块模拟登录1、页面分析2、代码实现(通过对比像素获取缺口位置) 四、openCV1、简介2、代码3、案例 五、selenium 反爬六、百度智能云…...
视频图像处理算法opencv模块硬件设计图像颜色识别模块
1、Opencv简介 OpenCV是一个基于Apache2.0许可(开源)发行的跨平台计算机视觉和机器学习软件库,可以运行在Linux、Windows、Android和Mac OS操作系统上 它轻量级而且高效——由一系列 C 函数和少量 C 类构成,同时提供了Python、Rub…...

目标检测网络之Fast-RCNN
文章目录 Fast RCNN解决的问题Fast RCNN网络结构RoI pooling layer合并损失函数及其传播统一的损失函数损失函数的反向传播过程Fast RCNN的训练方法样本选择方法SGD参数设置多尺度图像训练SVD压缩全连接层对比实验对比实验使用到的网络结构VOC2010和VOC2012数据集结果VOC2007数…...

Golang Gorm 创建HOOK
创建的时候,在插入数据之前,想要做一些事情。钩子函数比较简单,就是实现before create的一个方法。 package mainimport ("gorm.io/driver/mysql""gorm.io/gorm" )type Student struct {ID int64Name string gorm:&q…...

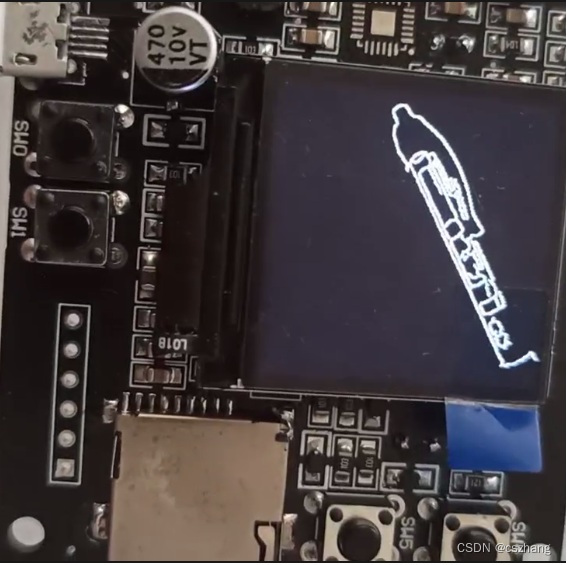
计算机视觉的应用15-图片旋转验证码的角度计算模型的应用,解决旋转图片矫正问题
大家好,我是微学AI,今天给大家介绍一下计算机视觉的应用15-图片旋转验证码的角度计算模型的应用,解决旋转图片矫正问题,在CV领域,图片旋转验证码的角度计算模型被广泛应用于解决旋转图片矫正问题,有效解决机…...
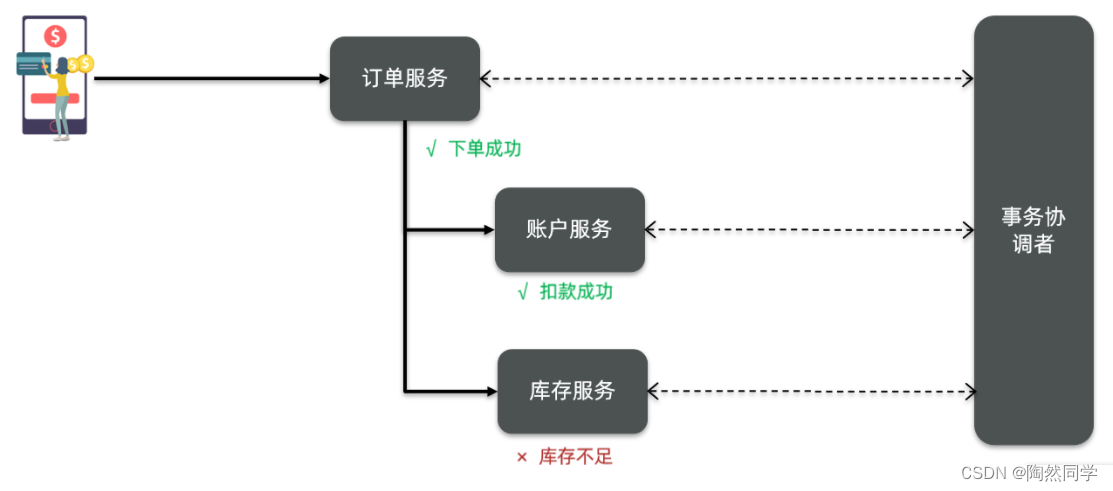
【Seata】分布式事务问题和理论基础
目录 1.分布式事务问题 1.1本地事务 1.2分布式事务 2.理论基础 2.1CAP定理 2.1.1一致性 2.1.2可用性 2.1.3分区容错 2.1.4矛盾 2.2BASE理论 2.3解决分布式事务的思路 1.分布式事务问题 1.1本地事务 本地事务,也就是传统的单机事务。在传统数据库事务中…...

HS2-HF_Patch终极指南:一键为Honey Select 2安装完整增强补丁
HS2-HF_Patch终极指南:一键为Honey Select 2安装完整增强补丁 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch HS2-HF_Patch是专为《Honey Select 2》…...

突破存储限制:群晖DSM7下Synology Photos自定义文件夹挂载实战
1. 为什么需要自定义文件夹挂载 很多群晖用户升级到DSM7后都会遇到一个头疼的问题:Synology Photos默认把所有个人照片都存放在/home/Photos目录下,而这个目录实际上位于/homes共享文件夹中。随着照片数量不断增加,/homes所在存储空间很快就会…...

Path of Building:3个步骤从Build小白到规划大师的完整指南
Path of Building:3个步骤从Build小白到规划大师的完整指南 【免费下载链接】PathOfBuilding Offline build planner for Path of Exile. 项目地址: https://gitcode.com/GitHub_Trending/pa/PathOfBuilding Path of Building作为流放之路玩家最信赖的Build规…...

Gopeed下载器深度解析:从零开始构建你的全平台高速下载解决方案
Gopeed下载器深度解析:从零开始构建你的全平台高速下载解决方案 【免费下载链接】gopeed A fast, modern download manager for HTTP, BitTorrent, Magnet, and ed2k. Cross-platform, built with Golang and Flutter. 项目地址: https://gitcode.com/GitHub_Tre…...

TPU柔性材料3D打印GoPro车载支架:从减震原理到实战拍摄全指南
1. 项目概述与设计思路我一直对第一人称视角(FPV)拍摄很着迷,尤其是那种能贴着地面、模拟小车视角疾驰的画面,动态感和沉浸感是手持拍摄无法比拟的。市面上的运动相机车载支架要么是硬连接,颠簸起来画面抖动得厉害&…...

基于BLE HID与旋转编码器打造双模式无线遥控器
1. 项目概述你有没有过这样的时刻:窝在沙发里看剧,想调个音量或者暂停一下,却不得不伸手去够茶几上的键盘或鼠标,打断那份沉浸的惬意?或者,在电脑上回味一些经典老游戏时,觉得用键盘移动、鼠标射…...

WipperSnapper+Adafruit IO:无代码物联网开发实战,从传感器到云端自动化
1. 项目概述与核心价值如果你和我一样,在物联网(IoT)项目初期,常常被复杂的嵌入式编程、网络协议和云平台对接搞得焦头烂额,那么今天分享的这个实战项目,或许能让你眼前一亮。我们这次不谈复杂的代码&#…...

3分钟快速上手:ESP32 Arduino开发环境完整配置指南
3分钟快速上手:ESP32 Arduino开发环境完整配置指南 【免费下载链接】arduino-esp32 Arduino core for the ESP32 family of SoCs 项目地址: https://gitcode.com/GitHub_Trending/ar/arduino-esp32 想在熟悉的Arduino环境中开发强大的ESP32物联网项目吗&…...

汽车该多久换一代
汽车该多久换一代 买车的人其实不怕四年换代,怕的是刚提车半年就被新款打成旧款。李想这句话能引起讨论,原因也在这里:车企说的是研发验证周期,车主感受到的是价格、配置和二手残值。 汽车确实没法完全照着手机节奏跑。手机坏了可…...

Instagram视频下载终极指南:三分钟掌握免费下载技巧
Instagram视频下载终极指南:三分钟掌握免费下载技巧 【免费下载链接】instagram-video-downloader Simple website made with Next.js for downloading instagram videos with an API that can be used to integrate it in other applications. 项目地址: https:…...