双系统ubuntu20.04(neotic版本)从0实现Gazebo仿真slam建图
双系统ubuntu20.04(neotic版本)从0实现Gazebo仿真slam建图
昨晚完成了ROS的多机通讯,还没来得及整理相关操作步骤,在进行实际小车的实验之前,还是先打算在仿真环境中进行测试,熟悉相关的操作步骤,计划通过虚拟机(笔记本)来操纵双系统(台式机)完成在仿真环境中的地图构建,导航等功能。
ps:别问为什么不直接通过向日葵远程操控,后面要进行实际环境中多机器人编队的测试,多机器人编队功能已经被写好了,但是需要安装在远程PC的工作空间中进行多机器人的控制
1、安装ROS(neotic)版本依赖
sudo apt-get install ros-noetic-joy ros-noetic-teleop-twist-joy \ros-noetic-teleop-twist-keyboard ros-noetic-laser-proc \ros-noetic-rgbd-launch ros-noetic-rosserial-arduino \ros-noetic-rosserial-python ros-noetic-rosserial-client \ros-noetic-rosserial-msgs ros-noetic-amcl ros-noetic-map-server \ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro \ros-noetic-compressed-image-transport ros-noetic-rqt* ros-noetic-rviz \ros-noetic-gmapping ros-noetic-navigation ros-noetic-interactive-markers
ROS1和ROS2其他版本安装相关依赖参考网址(ROS1&ROS2依赖包)注意☝的是一行指令,分行输入会报错的。
2、安装turtlebot3软件包
Install TurtleBot3 via Debian Packages.
sudo apt install ros-noetic-dynamixel-sdksudo apt install ros-noetic-turtlebot3-msgssudo apt install ros-noetic-turtlebot3
3、设置环境变量
source ~/.bashrc
4、创建工作空间安装TB3功能包
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
git clone -b noetic-devel http://ghproxy.com/https://github.com/ROBOTIS-GIT/DynamixelSDK.git
git clone -b noetic-devel http://ghproxy.com/https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone -b noetic-devel http://ghproxy.com/https://github.com/ROBOTIS-GIT/turtlebot3.git
git clone -b noetic-devel http://ghproxy.com/https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
cd ~/catkin_ws && catkin_make
ROS1其他版本的TB3功能包参考ROS1功能包
ROS2(foxy)版本功能包参考ROS2功能包
注意ROS1&ROS2的其他版本连接中改对应版本名称
编译成功
 5、Gazebo仿真
5、Gazebo仿真
(1)选择启动的机器人模型
export TURTLEBOT3_MODEL=waffle_pi
export TURTLEBOT3_MODEL=burger
(2)启动gazebo仿真环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch
可能会出现以下报错:

找到错误原因“环境变量设置有问题”
错误原因为环境变量设置有问题(后面进行优化)
运行下方代码后再执行roslaunch
source ~/catkin_ws/devel/setup.bash
roslaunch turtlebot3_slam turtlebot3_slam.launch
turtlebot3_world.launch

(3)启动rviz进行建图
打开新的终端,还要在输入一边机器人选择模型的指令,在输入以下指令(后面进行优化)
roslaunch turtlebot3_slam turtlebot3_slam.launch
(4)控制小车移动实现建图
打开新的终端,还要在输入一边机器人选择模型的指令
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch

(5)保存地图:
rosrun map_server map_saver -f ~/map_world

地图自动保存在~/home/map目录下,名为map_world.yaml和map_world.pgm

优化
目前在启动机器人小车在仿真环境中的建图非常麻烦,每次启动新的节点都要输入指令选择一遍机器人的模型,且在启动turtlebot3_world.launch文件前还要进行以便环境的配置,总之是非常麻烦的!
下面把这些指令提前配置到source ~/.bashrc文件中
(1)手动配置
输入:
sudo gedit ~/.bashrc
在文本的最后加入以下这些指令:
source ~/catkin_ws/devel/setup.bash
export TURTLEBOT3_MODEL=waffle_pi//如果你要选择burger型机器人输入export TURTLEBOT3_MODEL=burger
export ROS_DOMAIN_ID=30 #TURTLEBOT3
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/catkin_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models
然后保存后关闭文件,打开终端输入source ~/.bashrc更新环境即可完成。
(2)输入指令配置
我参考其他配置环境指令,输入后可达到相同效果。
echo 'source ~/catkin_ws/devel/setup.bash' >> ~/.bashrc
echo 'export TURTLEBOT3_MODEL=waffle_pi' >> ~/.bashrc
echo 'export ROS_DOMAIN_ID=30 #TURTLEBOT3' >> ~/.bashrc
echo 'export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/catkin_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models' >> ~/.bashrc
输入完成后打开新终端输入:
source ~/.bashrc
设置完成后,现在启动建图,仅需要输入:
(1)启动gazebo仿真环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch
(2)启动RVIZ
roslaunch turtlebot3_slam turtlebot3_slam.launch
(3)启动键盘控制节点即可
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
相关文章:
双系统ubuntu20.04(neotic版本)从0实现Gazebo仿真slam建图
双系统ubuntu20.04(neotic版本)从0实现Gazebo仿真slam建图 昨晚完成了ROS的多机通讯,还没来得及整理相关操作步骤,在进行实际小车的实验之前,还是先打算在仿真环境中进行测试,熟悉相关的操作步骤,计划通过虚拟机&…...

(JavaEE)(多线程案例)线程池 (简单介绍了工厂模式)(含经典面试题ThreadPoolExector构造方法)
线程诞生的意义,是因为进程的创建/销毁,太重了(比较慢),虽然和进程比,线程更快了,但是如果进一步提高线程创建销毁的频率,线程的开销就不能忽视了。 这时候我们就要找一些其他的办法…...

单播与多播mac地址
MAC 地址(Media Access Control Address)是一个用于识别网络设备的唯一标识符。每个网络设备都有一个独特的 MAC 地址,用于在局域网中进行通信。 单播MAC地址:单播MAC地址用于单播通信,即一对一的通信模式。当设备发送…...
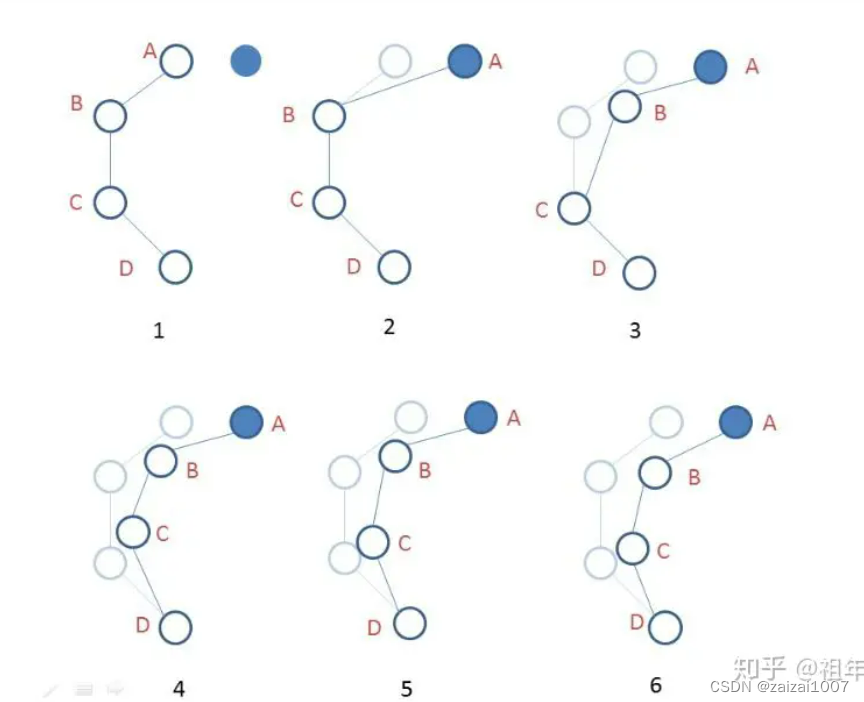
反向动力学Ik学习
参考文章:(非本人原创) 英文原文:Inverse Kinematics Techniques in Computer Graphics: A Survey (andreasaristidou.com) 知乎翻译文章: 【游戏开发】逆向运动学(IK)详解 - 知乎 (zhihu.co…...
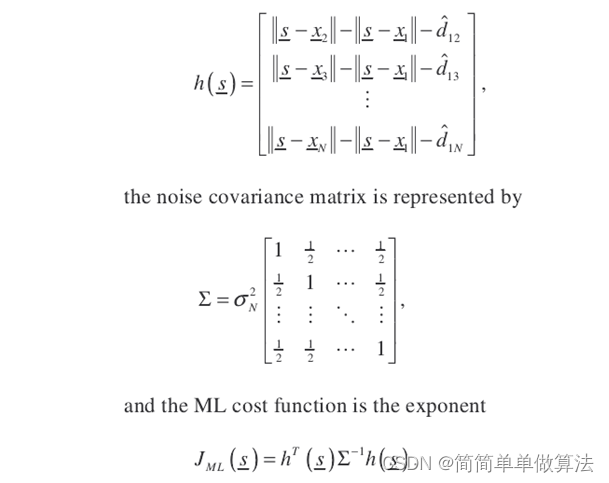
基于Levenberg-Marquardt算法的声源定位matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 matlab2022a 3.部分核心程序 .................................................................... %ML if (bML1)varxs…...
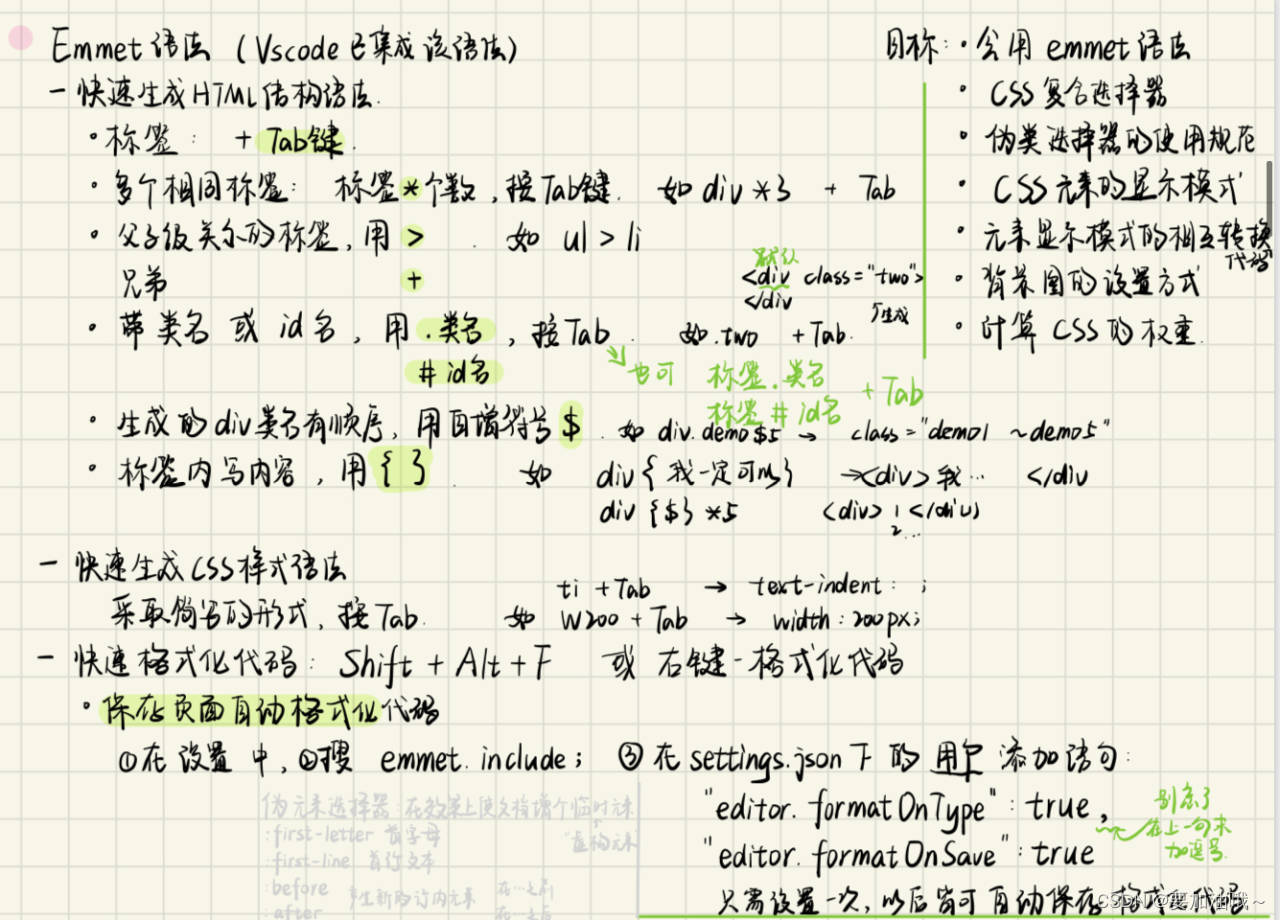
vscode的Emmet语法失效
解决方案:设置 -> 搜索Emmet -> 勾选 Emmet:Trigger Expansion On Tab和Emmet: Use Inline Completions -> 重启 注:Emmet语法是vscode自带的语法,可以快速生成HTML结构/CSS样式/格式化语法 Emmet语法 参考:关于vscode使…...
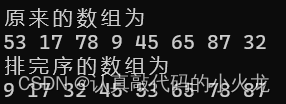
堆排序(大根堆)
堆的定义如下,n个关键字序列[1...n]称为堆,当且仅当满足: a(i)>a(2i)且a(i)>a(2i1) 这个为大根堆 a(i)<a(2i)且a(i)<a(2i 1) 这个为小根堆 通过建堆得到大根堆 大根堆 87,45,78,32,17,65,53,9 可以看成 …...
Mybatis学习笔记3 在Web中应用Mybatis
Mybatis学习笔记2 增删改查及核心配置文件详解_biubiubiu0706的博客-CSDN博客 技术栈:HTMLServletMybatis 学习目标: 掌握mybatis在web应用中如何使用 Mybatis三大对对象的作用域和生命周期 关于Mybatis中三大对象的作用域和生命周期、 官网说明 ThreadLocal原理及使用 巩…...

软件测试之功能测试详解
一、功能测试概述 1)功能测试就是对产品的各功能进行验证,根据功能测试用例,逐项测试,检查产品是否达到用户要求的功能。 2)功能测试,根据产品特性、操作描述和用户方案,测试一个产品的特性和…...

javascript选取元素的范围,可以包含父级,也可以不包含父级
//函数可以选取元素的范围,对于要选取文本的非常方便,或选取特定的子节点 function getRange(element){//判断是否支持range范围选取var supdocument.implementation.hasFeature("Range","2.0");var also(typeof document.createRan…...

QGIS怎么修改源代码?持续更新...
修改配置文件保存位置 修改目的:放着和本地安装的其他QGIS共用一份配置文件 修改文件:core/qgsuserprofilemanager.cpp 修改位置:第37行 return basePath QDir::separator() "my_profiles";修改完毕后,再次生成一下…...
dev board sig技术文章:轻量系统适配ARM架构芯片平台
摘要:本文简单介绍OpenHarmony轻量系统移植,会分多篇 适合群体:想自己动手移植OpenHarmony轻量系统的朋友 开始尝试讲解一下系统的移植,主要是轻量系统,也可能会顺便讲下L1移植。 1.1移植类型 OpenHarmony轻量系统的…...

MyBatis之增删查改功能
文章目录 一、创建各种类二、MyBatis的各种功能 1、查询<select>2、增加<insert>3、修改<update>4、删除<delete>三、总结 前言 在MyBatis项目中编写代码实现对MySql数据库的增删查改 一、创建各种类 1、在Java包的mapper文件下创建一个接口 我创建…...

Leetcode算法入门与数组丨5. 数组二分查找
文章目录 1 二分查找算法2 二分查找细节3 二分查找两种思路3.1 直接法3.2 排除法 1 二分查找算法 二分查找算法是一种常用的查找算法,也被称为折半查找算法。它适用于有序数组的查找,并通过将待查找区间不断缩小一半的方式来快速定位目标值。 算法思想…...
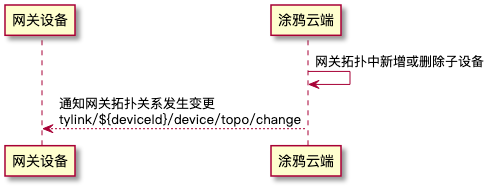
拓扑关系如何管理?
在设备对接涂鸦的云端过程中,一部分设备由于自身资源或硬件配置,无法直接连接云端。而是需要通过网关进行中转,由网关代理实现和云端进行数据交互,间接实现设备接入云端。这样的设备也称为子设备。 要想实现网关代理子设备接入云…...

vue的由来、vue教程和M-V-VM架构思想、vue的使用、nodejs
vue vue的由来 vue教程和M-V-VM架构思想 vue的初步简单使用 nodejs vue的由来 # 1 HTML(5)、CSS(3)、JavaScript(ES5、ES6、ES11):编写一个个的页面 -> 给后端(PHP、Python、Go、Java) -> 后端嵌入模板语法 -> 后端渲染完数据 -> 返回数据给前端 ->…...

课程表 循环依赖 拓扑排序 go语言
学会拓扑排序题目的基本解法 res数组 记录上课顺序g 记录学了课程i 能解锁的课程jindeg 记录每个课程的入度q 记录入度为0的课程 for循环q去解放其他课程 本题来自力扣课程表 func findOrder(numCourses int, prerequisites [][]int) []int {res : []int{}//建一个二维数组记…...

【红包雨接口设计】
一、服务器地址 http://rb.atguigu.cn 二、公共请求头参数 参数名称类型是否必选描述tokenString是用户唯一标识 备注:为了方便我们今天演示,服务端接受所有token。 三、接口 1. 创建红包雨 请求方式:GET请求地址:/api/v1/se…...

SSL证书到期更换证书会影响排名吗?
在现代的数字化时代,网络安全和用户体验成为了网站运营商和开发者们需要高度关注的问题。SSL证书作为一种重要的安全协议,对网站的安全性和用户信任起着至关重要的作用。然而,随着SSL证书的有效期限届满,许多网站运营商面临着更换…...

前端常用库之-JavaScript工具库lodash
文章目录 前端常用库之-JavaScript工具库lodash一、什么是lodash二、安装三、lodash使用Lodash 的 pick() 函数介绍和使用react 实例demo:pick结合...展开运算符(spread operator) 前端常用库之-JavaScript工具库lodash 一、什么是lodash 官网: https:…...

嵌入式处理器IP选型指南:从ARM到RISC-V的权衡与实战
1. 从一场早餐会聊起:为什么32位处理器IP依然是嵌入式开发的硬通货最近在整理资料时,翻到一篇十多年前的老新闻,说的是IP供应商CAST要在DesignCon 2012上办一场免费的早餐研讨会,主题是他们新推出的BA22 32位处理器IP核。新闻里笔…...

Erupt 七年最有诚意升级:官网、文档、脚手架更新,迈向工业级开源生态!
一、写在前面:为什么这次更新值得你重新认识 Erupt?过去几年,Erupt 一直被打上“功能强但太朴素”的标签。注解驱动、AI 模块、多 UI 模板、Cloud 集群、AI Agent,内核卷到飞起,但官网、文档、脚手架这“门面三件套”始…...

onlybooks/llm项目解析:大语言模型本地部署与微调实战指南
1. 项目概述与核心价值最近在折腾大语言模型本地部署和微调的朋友,估计没少在各种开源社区和模型仓库里翻找。我自己也是,从早期的GPT-2到现在的各种百亿、千亿参数模型,一路踩坑过来,深感一个清晰、易用、维护良好的项目对效率提…...

学术人必抢的实时检索红利,Perplexity这4个隐藏功能90%研究者至今未启用,错过再等半年!
更多请点击: https://intelliparadigm.com 第一章:Perplexity实时学术搜索怎么用 Perplexity 是一款面向研究者与开发者设计的实时学术搜索引擎,其核心优势在于直接对接 arXiv、PubMed、ACL Anthology、Semantic Scholar 等权威学术数据库&a…...

芯片人才危机破局:D.E.I.B.战略如何驱动创新与商业成功
1. 芯片行业人才危机的深度剖析与D.E.I.B.的战略价值 最近和几位在芯片设计公司和晶圆厂负责招聘的老友聊天,大家不约而同地提到了同一个词:“焦头烂额”。不是项目进度卡脖子,而是人根本招不到。一位在模拟芯片公司做HR总监的朋友告诉我&…...

汽车存储技术演进:从边缘计算到车规级设计的核心挑战与选型指南
1. 汽车存储需求变迁:从机械心脏到数字大脑二十年前,我们选车看的是发动机的轰鸣、变速箱的平顺和底盘的扎实。如今,走进4S店,销售顾问会先带你坐进驾驶舱,点亮那块巨大的中控屏,演示语音助手、在线导航、高…...

企业智能体架构解析:从LLM集成到自动化管理实践
1. 项目概述:一个面向企业管理的智能体架构最近在开源社区里,我注意到一个挺有意思的项目:kernelshreyak/company-manager-agent。光看这个名字,你可能会联想到一个简单的任务管理工具,但深入研究后,我发现…...

Windows右键菜单为何变得臃肿?ContextMenuManager帮你重新掌控
Windows右键菜单为何变得臃肿?ContextMenuManager帮你重新掌控 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager 你是否曾为Windows右键菜单的混乱而烦…...

旭雷禹鼎遥控器F21-E2B-8起重机天车行车电动葫芦工业无线遥控器
旭雷禹鼎遥控器F21-E2B-8起重机天车行车电动葫芦工业无线遥控器起重机工业无线遥控器的兼容性极强,可适配各类型号、不同吨位的起重机,无需大规模改造设备,大幅降低企业升级成本。无论是桥式起重机、门式起重机,还是塔式起重机、悬…...

电子设计协同:跨团队互联规划工具的应用与优化
1. 跨团队互联规划:电子设计协同的破局之道在当今高度复杂的电子系统设计中,芯片(IC)、封装(Package)和印刷电路板(PCB)三大设计团队的协同工作已成为决定产品成败的关键因素。传统设计流程中,这三个团队往往各自为政,通过Excel表…...