力扣669 补9.16
最近大三上四天有早八,真的是受不了了啊,欧嗨呦,早上困如狗,然后,下午困如狗,然后晚上困如狗,尤其我最近在晚上7点到10点这个时间段看力扣,看得我昏昏欲睡,不自觉就睡了1个小时,可能在犯困的时间段不适合做高难度的题目。
还有英语也要抓紧搞,好久没搞英语了,力扣每天一题就搞得我没时间搞别的了,基本就是下午在看力扣,然后睡了犯困睡了1小时去吃饭,然后晚上差不多,再想一会,犯困再睡1个小时,睡醒想不出来就看答案。。
再这样我就没法坚持刷下去了,太低效了,想想自己一天干了啥。
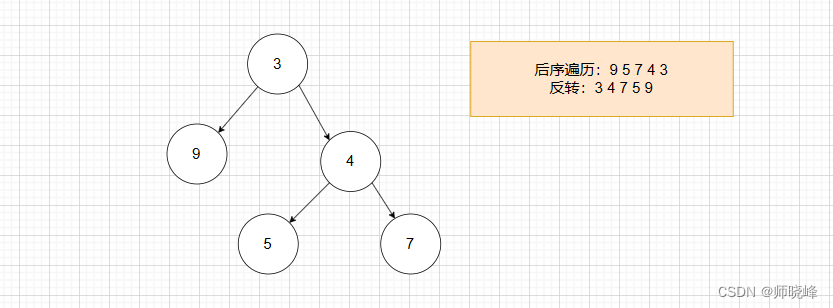
669.修建二叉树
做不来,感觉题解很精妙,return加递归的作用我是没想到的。
class Solution {
public TreeNode trimBST(TreeNode root, int low, int high) {
// 从当前节点及其子树,寻找满足条件的的节点。
if(root==null) return null;
return dfs(root,low,high);
}
TreeNode dfs(TreeNode root,int low,int high){
// 如果当前节点正常,就正常进入递归,继续遍历节点,如果不正常也会进入递归,继续遍历。
// return + 递归也是一个神奇的组合。保证函数能够一直递归进行下去,直到遍历完所有节点。
if(root==null) return null;
if(root.val>high){
return dfs(root.left,low,high);
}
else if(root.val<low) return dfs(root.right,low,high);
else{
root.left=dfs(root.left,low,high);
root.right=dfs(root.right,low,high);
return root;
}
}
}
相关文章:
力扣669 补9.16
最近大三上四天有早八,真的是受不了了啊,欧嗨呦,早上困如狗,然后,下午困如狗,然后晚上困如狗,尤其我最近在晚上7点到10点这个时间段看力扣,看得我昏昏欲睡,不自觉就睡了1…...
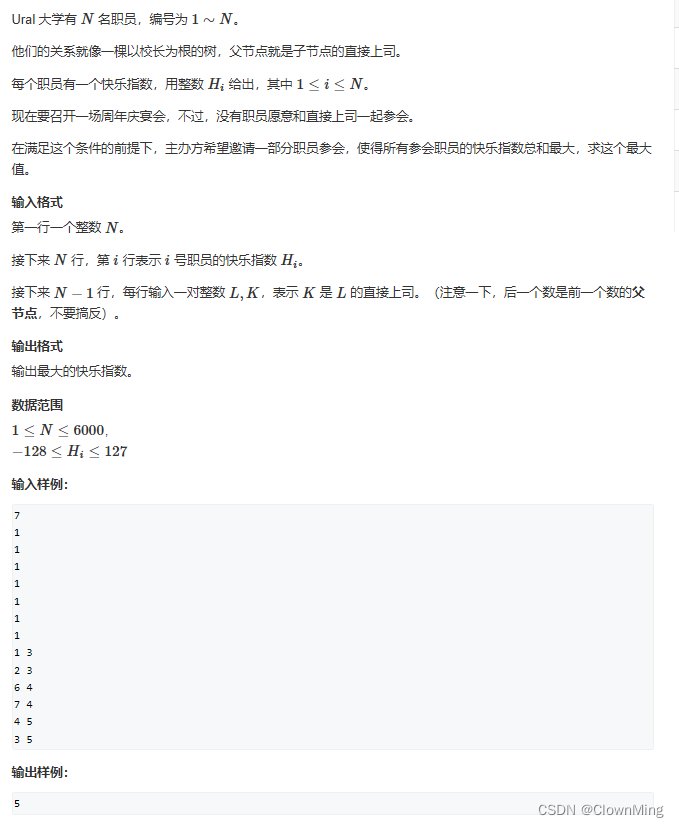
2023-9-22 没有上司的舞会
题目链接:没有上司的舞会 #include <cstring> #include <iostream> #include <algorithm>using namespace std;const int N 6010;int n; int happy[N]; int h[N], e[N], ne[N], idx; bool has_father[N];// 两个状态,选该节点或不选该…...

【HDFS】cachingStrategy的设置
org.apache.hadoop.hdfs.client.impl.BlockReaderFactory#getRemoteBlockReader: private BlockReader getRemoteBlockReader(Peer peer) throws IOException {int networkDistance = clientContext.getNetworkDistance(datanode);return BlockReaderRemote...

性能测试 —— 性能测试常见的测试指标 !
一、什么是性能测试 先看下百度百科对它的定义,性能测试是通过自动化的测试工具模拟多种正常、峰值以及异常负载条件来对系统的各项性能指标进行测试。 我们可以认为性能测试是:通过在测试环境下对系统或构件的性能进行探测,用以验证在生产环…...
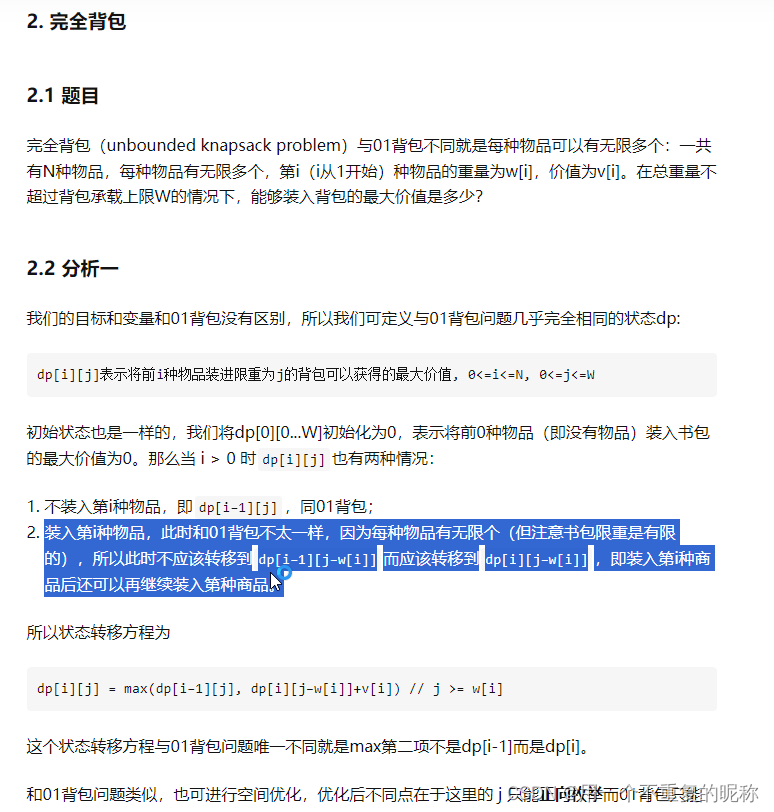
【学习草稿】背包问题
一、01背包问题 图解详细解析 (转载) https://blog.csdn.net/qq_37767455/article/details/99086678 :Vi表示第 i 个物品的价值,Wi表示第 i 个物品的体积,定义V(i,j):当前背包容量 j,前 i 个物…...
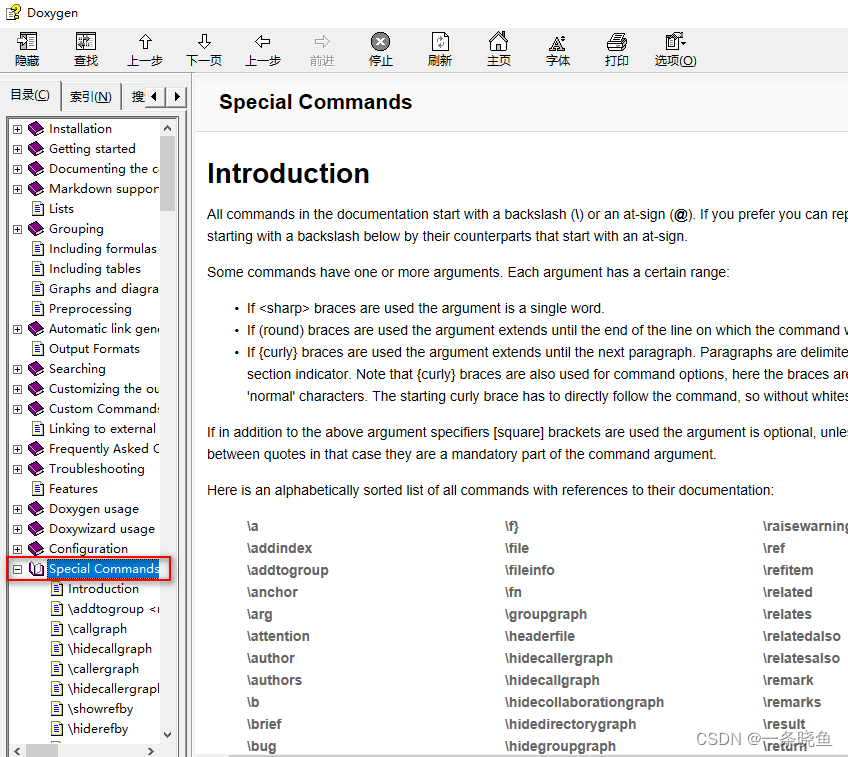
doxygen c++ 语法
c基本语法模板 以 /*! 开头, */ 结尾 /*!\关键字1\关键字2 */1 文件头部信息 /*! \file ClassA.h* \brief 文件说明 定义了类fatherA* \details This class is used to demonstrate a number of section commands.* \author John Doe* \author Jan Doe* \v…...
)
ChatGLM微调基于P-Tuning/LoRA/Full parameter(上)
1. 准备环境 首先必须有7个G的显存以上,torch >= 1.10 需要根据你的cuda版本 1.1 模型下载 $ git lfs install $ git clone https://huggingface.co/THUDM/chatglm-6b1.2 docker环境搭建 环境搭建 $ sudo docker pull slpcat/chatglm-6b:latest $ sudo docker run -it …...

BLE Mesh蓝牙mesh传输大数据包传输文件照片等大数据量通讯
1、BLE Mesh数据传输现状 BLE Mesh网络技术是低功耗蓝牙的一个进阶版,Mesh扩大了蓝牙在应用中的规模和范围,因为它同时支持超过三万个网络节点,可以跨越大型建筑物,不仅可以使得医疗健康应用更加方便快捷,还能监测像学…...
9.18 QT作业
mainwindow.h QT_BEGIN_NAMESPACE namespace Ui { class MainWindow; } QT_END_NAMESPACEclass MainWindow : public QMainWindow {Q_OBJECTpublic:MainWindow(QWidget *parent nullptr);~MainWindow();signals:void jump(); //自定义跳转信号函数private slots:vo…...
【100天精通Python】Day67:Python可视化_Matplotlib 绘动画,2D、3D 动画 示例+代码
1 绘制2D动画(animation) Matplotlib是一个Python绘图库,它提供了丰富的绘图功能,包括绘制动画。要绘制动画,Matplotlib提供了FuncAnimation类,允许您创建基于函数的动画。下面是一个详细的Matplotlib动画示…...
Linux内核源码分析 (B.x)Linux页表的映射
Linux内核源码分析 (B.x)Linux页表的映射 文章目录 Linux内核源码分析 (B.x)Linux页表的映射一、ARM32页表1、页表术语2、虚拟地址到物理地址转换3、一级页表项4、二级页表项 二、ARM64页表1、ARMv8-A架构2、4KB大小页4级映射 三、Linux内核中关于页表的函数和宏1、查询页表2、…...

机器学习(15)---代价函数、损失函数和目标函数详解
文章目录 一、各自定义二、各自详解三、代价函数和损失函数区别四、例题理解 一、各自定义 1. 代价函数:代价函数(Cost Function)是定义在整个训练集上的,是所有样本误差的平均,也就是损失函数的平均。它用于衡量模型在…...

计算机专业大学规划之双非
亲爱的计算机专业大一学弟学妹们,欢迎来到充满挑战和机遇的大学校园!在经历了小半年的大学生活后,是否会对自己的未来感到一些迷茫,借着前几天给我大一的妹妹聊天的机会,我想发表一下关于我的建议(仅限个…...
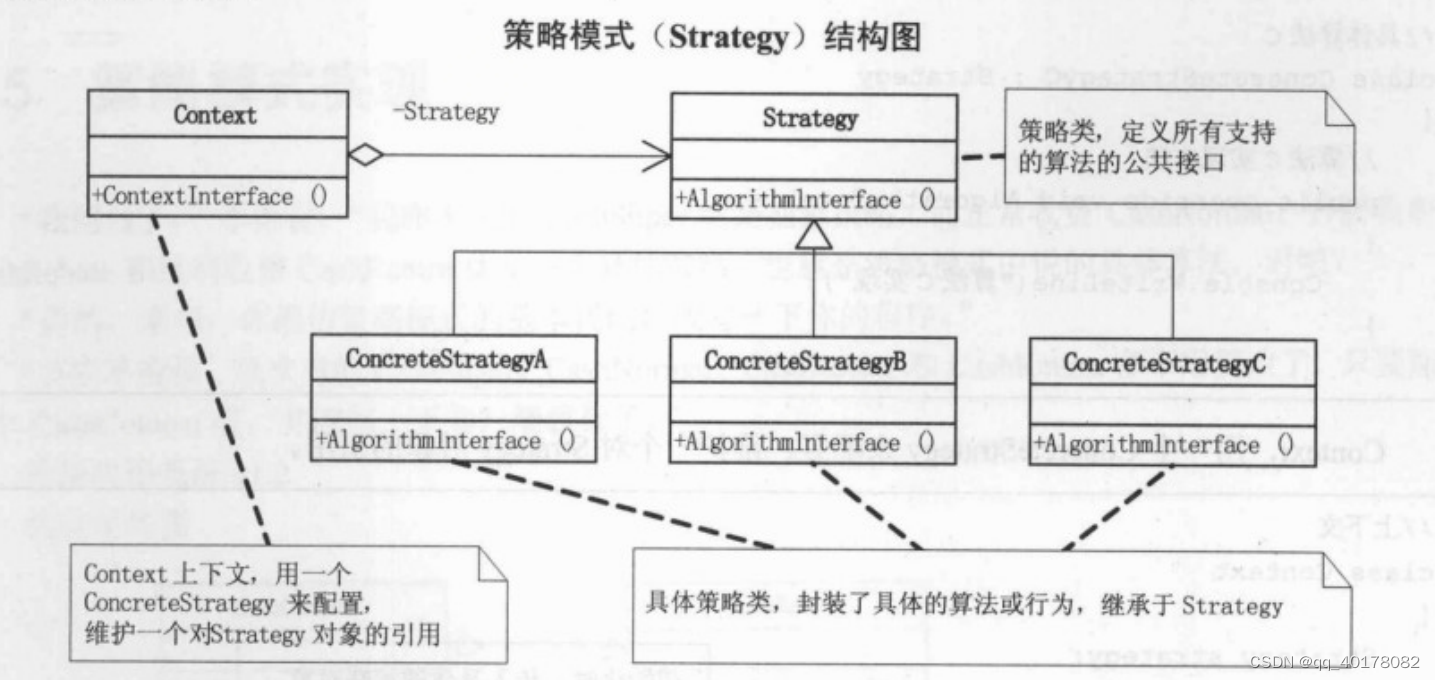
2.策略模式
UML图 代码 main.cpp #include "Strategy.h" #include "Context.h"void test() {Context* pContext nullptr;/* StrategyA */pContext new Context(new StrategyA());pContext->contextInterface();/* StrategyB */pContext new Context(new Strat…...
算法通过村第七关-树(递归/二叉树遍历)黄金笔记|迭代遍历
文章目录 前言1. 迭代法实现前序遍历2. 迭代法实现中序遍历3. 迭代法实现后序遍历总结 前言 提示:在一个信息爆炸却多半无用的世界,清晰的见解就成了一种力量。 --尤瓦尔赫拉利《今日简史》 你是不是觉得上一关特别简单,代码少,背…...
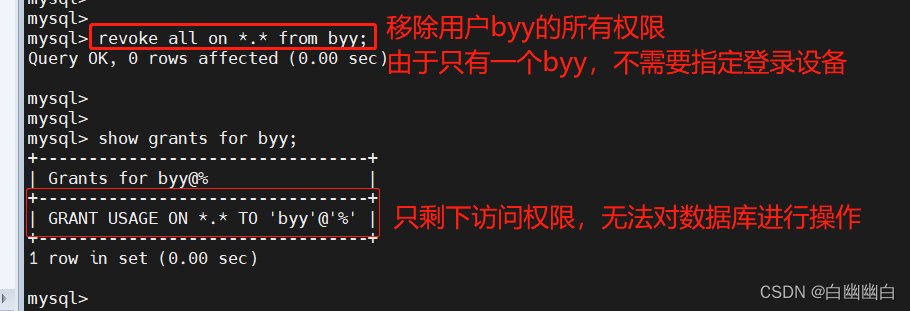
MySQL数据库简介+库表管理操作+数据库用户管理
Mysql Part 1 一、数据库的基本概念1.1 使用数据库的必要性1.2 数据库基本概念1.2.1 数据(Data)1.2.2 表1.2.3 数据库1.2.4 数据库管理系统(DBMS)1.2.5 数据库系统 1.3 数据库的分类1.3.1 关系数据库 SQL1.3.2 非关系数据库 NoSQL…...
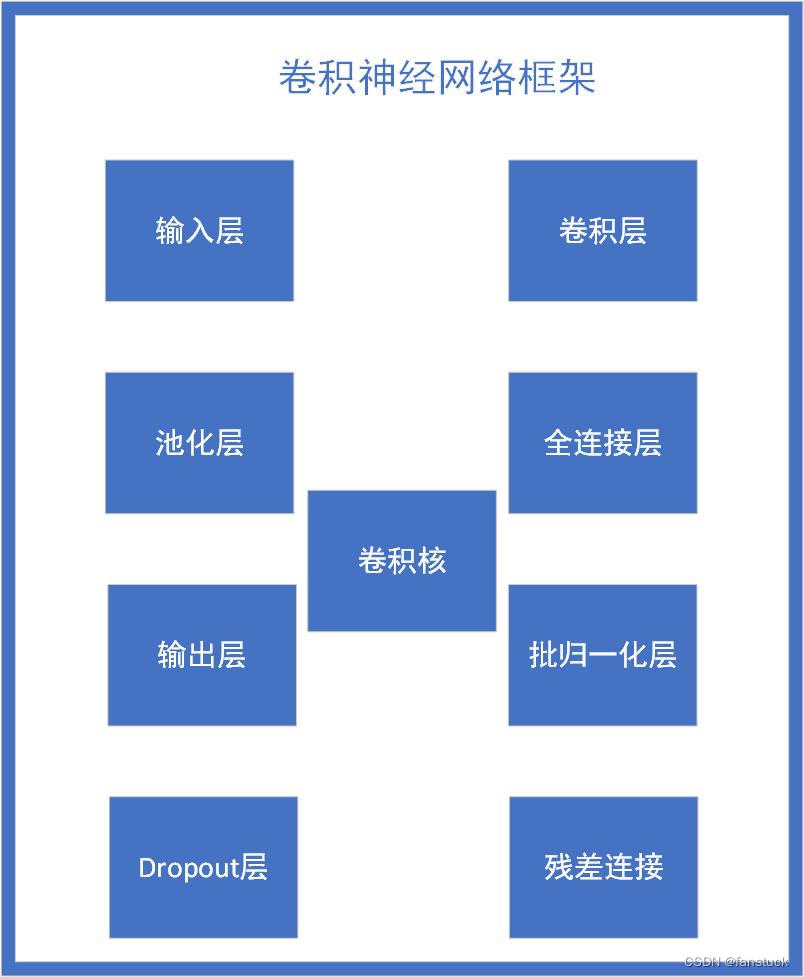
PyTorch实战:卷积神经网络详解+Python实现卷积神经网络Cifar10彩色图片分类
目录 前言 一、卷积神经网络概述 二、卷积神经网络特点 卷积运算 单通道,二维卷积运算示例 单通道,二维,带偏置的卷积示例 带填充的单通道,二维卷积运算示例 Valid卷积 Same卷积 多通道卷积计算 1.局部感知域 2.参数共…...
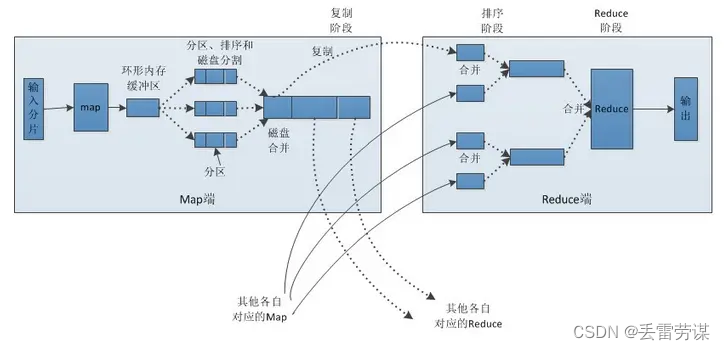
MapRdeuce工作原理
hadoop - (三)通俗易懂地理解MapReduce的工作原理 - 个人文章 - SegmentFault 思否 MapReduce架构 MapReduce执行过程 Map和Reduce工作流程 (input) ->map-> ->combine-> ->reduce-> (output) Map: Reduce...

完整指南:使用JavaScript从零开始构建中国象棋游戏
引言 中国象棋,又被称为国际象棋,是一款起源于中国的古老棋类游戏。本文旨在为大家提供一个简单明了的步骤,教你如何使用JavaScript从零开始构建这款经典的棋类游戏。 1. 游戏简介 在中国象棋中,两方各有一军队,包括…...

PG-DBA培训19:PostgreSQL高可用集群项目实战之Patroni
一、风哥PG-DBA培训19:PostgreSQL高可用集群项目实战之Patroni 课程目标: 本课程由风哥发布的基于PostgreSQL数据库的系列课程,本课程属于PostgreSQL主从复制与高可用集群阶段之PostgreSQL高可用集群项目实战之Patroni,学完本课…...

从入门到上岗,Java+AI 复合型人才养成攻略
当下编程行业格局正在悄然改变,纯 Java 后端岗位内卷日趋严重,薪资增长逐步放缓;纯粹的 AI 算法岗门槛居高不下,对学历、数理功底要求严苛,普通开发者很难入局。 而Java+AI 复合型开发顺势成为行业刚需岗位,既依托成熟的 Java 体系承接业务开发,又能融入人工智能技术实…...

BetterJoy完整配置指南:5分钟让Switch手柄在PC上完美运行
BetterJoy完整配置指南:5分钟让Switch手柄在PC上完美运行 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcode.c…...

航空航天为什么离不开高强镁合金?国产替代到哪一步了
飞机每减重一千克,全年大约节省四千两百美元的燃油费用——这是航空工程师熟悉的经验值。在商业航空领域,这个数字还只是财务账;在战斗机、导弹和卫星的世界里,减重的收益被换算成更远的航程、更大的载荷、更高的机动性࿰…...

如何快速掌握Avidemux:新手完整入门指南与5个核心技巧
如何快速掌握Avidemux:新手完整入门指南与5个核心技巧 【免费下载链接】avidemux2 Avidemux2, simple video editor 项目地址: https://gitcode.com/gh_mirrors/avi/avidemux2 Avidemux是一款功能强大且完全开源的专业视频编辑工具,专为快速剪辑、…...

League Akari:如何通过LCU API实现英雄联盟游戏流程的智能化管理?
League Akari:如何通过LCU API实现英雄联盟游戏流程的智能化管理? 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit Leag…...

基于Cynthion逆向USB协议,为DP100电源开发Linux控制软件
1. 项目概述:用Cynthion嗅探USB,为DP100电源打造Linux软件作为一名长期在Linux环境下折腾硬件和嵌入式开发的爱好者,我经常遇到一个头疼的问题:很多不错的桌面小设备,比如电源、示波器、逻辑分析仪,它们的官…...

基于Atmega 1284P的16位复古计算器:硬件设计与软件实现全解析
1. 项目概述与核心思路最近在整理工作室时,翻出了一堆老旧的7段数码管和矩阵键盘,看着这些充满复古气息的元件,一个想法冒了出来:为什么不自己动手做一台复古风格的计算器呢?不是那种用液晶屏显示的现代计算器…...

解锁你的音乐收藏:浏览器端音频解密完整指南
解锁你的音乐收藏:浏览器端音频解密完整指南 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https://gitcod…...

MaxEnt建模总失败?别急着换数据,先检查ArcGIS裁剪栅格这1个像素的坑
MaxEnt建模失败?ArcGIS栅格裁剪的1像素陷阱与精准修复指南当你花费数小时整理好WorldClim气候数据、本地DEM高程和物种分布数据,满心期待地点击MaxEnt的运行按钮时,屏幕上突然跳出"Error projecting, two layers have different geograp…...

Claude Mythos Preview首月揪万余漏洞、拦截150万美元电诈,网络安全格局将变?
玻璃翼计划首战告捷A厂的玻璃翼计划首战告捷,Mythos 30天内就挖出1万个致命漏洞,甚至拦截了150万美元电诈。面对雪片式的报告,人类程序员崩溃求饶:「求别挖了,根本修不完啊!」就在刚刚,Anthropi…...