极坐标和直角坐标的雅克比矩阵推导
我们经常需要在一些问题中研究坐标系的关系,这里讲讲最常见的极坐标和直角坐标的雅克比矩阵的推导。以二维坐标为例,三维坐标也是同理。
1. 直角坐标和极坐标
直角坐标表示为 ( x , y ) (x,y) (x,y),极坐标表示为 ( ρ , φ ) (\rho,\varphi) (ρ,φ),它们之间有如下的关系:
ρ 2 = x 2 + y 2 , φ = arctan y x ; x = ρ cos φ , y = ρ sin φ \begin{aligned} \rho^2=x^2+y^2,\quad &\varphi=\arctan\frac{y}{x};\\ x=\rho\cos\varphi,\quad&y=\rho\sin\varphi \end{aligned} ρ2=x2+y2,x=ρcosφ,φ=arctanxy;y=ρsinφ
2. 向量之间的雅克比矩阵
向量X和向量Y的微分映射由雅克比矩阵来刻画,给定两个向量 x = ( x 1 , x 2 , ⋯ , x n ) T \mathbf{x}=(x_1,x_2,\cdots,x_n)^T x=(x1,x2,⋯,xn)T, y = ( y 1 , y 2 , ⋯ , y m ) T \mathbf{y}=(y_1,y_2,\cdots,y_m)^T y=(y1,y2,⋯,ym)T
{ d x 1 = ∂ x 1 ∂ y 1 d y 1 + ∂ x 1 ∂ y 2 d y 2 + ⋯ + ∂ x 1 ∂ y m d y m d x 2 = ∂ x 2 ∂ y 1 d y 1 + ∂ x 2 ∂ y 2 d y 2 + ⋯ + ∂ x 2 ∂ y m d y m ⋮ d x n = ∂ x n ∂ y 1 d y 1 + ∂ x n ∂ y 2 d y 2 + ⋯ + ∂ x n ∂ y m d y m \begin{aligned} \begin{cases} \mathrm{d}x_1=\dfrac{\partial x_1}{\partial y_1}\mathrm{d}y_1+\dfrac{\partial x_1}{\partial y_2}\mathrm{d}y_2+\cdots+\dfrac{\partial x_1}{\partial y_m}\mathrm{d}y_m\\ \mathrm{d}x_2=\dfrac{\partial x_2}{\partial y_1}\mathrm{d}y_1+\dfrac{\partial x_2}{\partial y_2}\mathrm{d}y_2+\cdots+\dfrac{\partial x_2}{\partial y_m}\mathrm{d}y_m\\ \vdots\\ \mathrm{d}x_n=\dfrac{\partial x_n}{\partial y_1}\mathrm{d}y_1+\dfrac{\partial x_n}{\partial y_2}\mathrm{d}y_2+\cdots+\dfrac{\partial x_n}{\partial y_m}\mathrm{d}y_m\\ \end{cases} \end{aligned} ⎩ ⎨ ⎧dx1=∂y1∂x1dy1+∂y2∂x1dy2+⋯+∂ym∂x1dymdx2=∂y1∂x2dy1+∂y2∂x2dy2+⋯+∂ym∂x2dym⋮dxn=∂y1∂xndy1+∂y2∂xndy2+⋯+∂ym∂xndym
写成矩阵的形式就是:
( d x 1 d x 2 ⋮ d x n ) = [ ∂ x 1 ∂ y 1 ∂ x 1 ∂ y 2 ⋯ ∂ x 1 ∂ y m ∂ x 2 ∂ y 1 ∂ x 2 ∂ y 2 ⋯ ∂ x 2 ∂ y m ⋮ ⋮ ⋮ ∂ x n ∂ y 1 ∂ x n ∂ y 2 ⋯ ∂ x n ∂ y m ] ( d y 1 d y 2 ⋮ d y m ) \begin{pmatrix} \mathrm{d}x_1\\ \mathrm{d}x_2\\ \vdots\\ \mathrm{d}x_n \end{pmatrix} =\begin{bmatrix} \dfrac{\partial x_1}{\partial y_1} & \dfrac{\partial x_1}{\partial y_2} & \cdots & \dfrac{\partial x_1}{\partial y_m}\\ \dfrac{\partial x_2}{\partial y_1} & \dfrac{\partial x_2}{\partial y_2} & \cdots &\dfrac{\partial x_2}{\partial y_m} \\ \vdots & \vdots & & \vdots\\ \dfrac{\partial x_n}{\partial y_1} & \dfrac{\partial x_n}{\partial y_2} & \cdots &\dfrac{\partial x_n}{\partial y_m} \end{bmatrix}\begin{pmatrix} \mathrm{d}y_1\\ \mathrm{d}y_2\\ \vdots\\ \mathrm{d}y_m \end{pmatrix} dx1dx2⋮dxn = ∂y1∂x1∂y1∂x2⋮∂y1∂xn∂y2∂x1∂y2∂x2⋮∂y2∂xn⋯⋯⋯∂ym∂x1∂ym∂x2⋮∂ym∂xn dy1dy2⋮dym
其中的矩阵
∂ ( x 1 , x 2 , ⋯ , x n ) ∂ ( y 1 , y 2 , ⋯ , y m ) = [ ∂ x 1 ∂ y 1 ∂ x 1 ∂ y 2 ⋯ ∂ x 1 ∂ y m ∂ x 2 ∂ y 1 ∂ x 2 ∂ y 2 ⋯ ∂ x 2 ∂ y m ⋮ ⋮ ⋮ ∂ x n ∂ y 1 ∂ x n ∂ y 2 ⋯ ∂ x n ∂ y m ] \frac{\partial(x_1,x_2,\cdots,x_n)}{\partial(y_1,y_2,\cdots,y_m)}=\begin{bmatrix} \dfrac{\partial x_1}{\partial y_1} & \dfrac{\partial x_1}{\partial y_2} & \cdots & \dfrac{\partial x_1}{\partial y_m}\\ \dfrac{\partial x_2}{\partial y_1} & \dfrac{\partial x_2}{\partial y_2} & \cdots &\dfrac{\partial x_2}{\partial y_m} \\ \vdots & \vdots & & \vdots\\ \dfrac{\partial x_n}{\partial y_1} & \dfrac{\partial x_n}{\partial y_2} & \cdots &\dfrac{\partial x_n}{\partial y_m} \end{bmatrix} ∂(y1,y2,⋯,ym)∂(x1,x2,⋯,xn)= ∂y1∂x1∂y1∂x2⋮∂y1∂xn∂y2∂x1∂y2∂x2⋮∂y2∂xn⋯⋯⋯∂ym∂x1∂ym∂x2⋮∂ym∂xn
就是雅克比矩阵。我们称从坐标 y \mathbf{y} y(分母)到 x \mathbf{x} x(分子)的雅克比矩阵。
3. 极坐标到直角坐标的雅克比矩阵
这个比较简单,利用关系 x = ρ cos φ , y = ρ sin φ x=\rho\cos\varphi,y=\rho\sin\varphi x=ρcosφ,y=ρsinφ,
∂ x ∂ ρ = cos φ , ∂ x ∂ φ = − ρ sin φ ∂ y ∂ ρ = sin φ , ∂ y ∂ φ = ρ cos φ \begin{aligned} \dfrac{\partial x}{\partial \rho}=\cos\varphi, & \dfrac{\partial x}{\partial \varphi}=-\rho\sin\varphi\\ \dfrac{\partial y}{\partial \rho}=\sin\varphi, &\dfrac{\partial y}{\partial \varphi}=\rho\cos\varphi \end{aligned} ∂ρ∂x=cosφ,∂ρ∂y=sinφ,∂φ∂x=−ρsinφ∂φ∂y=ρcosφ
我们可以写出雅克比矩阵
∂ ( x , y ) ∂ ( ρ , φ ) = [ ∂ x ∂ ρ ∂ x ∂ φ ∂ y ∂ ρ ∂ y ∂ φ ] = [ cos φ − ρ sin φ sin φ ρ cos φ ] \dfrac{\partial(x,y)}{\partial(\rho,\varphi)}=\begin{bmatrix} \dfrac{\partial x}{\partial \rho} & \dfrac{\partial x}{\partial \varphi}\\ \dfrac{\partial y}{\partial \rho} &\dfrac{\partial y}{\partial \varphi} \end{bmatrix}=\begin{bmatrix} \cos\varphi &-\rho\sin\varphi\\ \sin\varphi &\rho\cos\varphi \end{bmatrix} ∂(ρ,φ)∂(x,y)= ∂ρ∂x∂ρ∂y∂φ∂x∂φ∂y =[cosφsinφ−ρsinφρcosφ]
4. 直角坐标到极坐标的雅克比矩阵
这里有两种方法。
4.1 直接求解
利用关系 ρ 2 = x 2 + y 2 , φ = arctan y x \rho^2=x^2+y^2,\quad \varphi=\arctan\frac{y}{x} ρ2=x2+y2,φ=arctanxy,我们可以对上式直接应用求导
对于第一个式子: ρ = x 2 + y 2 \rho=\sqrt{x^2+y^2} ρ=x2+y2
直接求导有:
∂ ρ ∂ x = 2 x 2 x 2 + y 2 = x ρ = cos φ ∂ ρ ∂ y = 2 y 2 x 2 + y 2 = y ρ = sin φ \frac{\partial\rho}{\partial x}=\frac{2x}{2\sqrt{x^2+y^2}}=\frac{x}{\rho}=\cos\varphi\\ \frac{\partial\rho}{\partial y}=\frac{2y}{2\sqrt{x^2+y^2}}=\frac{y}{\rho}=\sin\varphi ∂x∂ρ=2x2+y22x=ρx=cosφ∂y∂ρ=2x2+y22y=ρy=sinφ
对于第二个式子直接求导有:
∂ φ ∂ x = − y x 2 1 + y 2 x 2 = − y x 2 + y 2 = − y ρ 2 = − sin φ ρ ∂ φ ∂ y = 1 x 1 + y 2 x 2 = x x 2 + y 2 = x ρ 2 = cos φ ρ \frac{\partial \varphi}{\partial x}=\frac{-\dfrac{y}{x^{2}}}{1+\dfrac{y^{2}}{x^{2}}}=\frac{-y}{x^{2}+y^{2}}=\frac{-y}{\rho^2}=\frac{-\sin\varphi}{\rho}\\ \frac{\partial \varphi}{\partial y}=\frac{\dfrac{1}{x}}{1+\dfrac{y^{2}}{x^{2}}}=\frac{x}{x^{2}+y^{2}}=\frac{x}{\rho^2}=\frac{\cos\varphi}{\rho} ∂x∂φ=1+x2y2−x2y=x2+y2−y=ρ2−y=ρ−sinφ∂y∂φ=1+x2y2x1=x2+y2x=ρ2x=ρcosφ
当然也可以用全微分的方法来求解,我们对第一个式子全微分:
2 ρ d ρ = 2 x d x + 2 y d y 2\rho\mathrm{d}\rho=2x\mathrm{d}x+2y\mathrm{d}y 2ρdρ=2xdx+2ydy
于是得到
d ρ = x ρ d x + y ρ d y \mathrm{d}\rho=\frac{x}{\rho}\mathrm{d}x+\frac{y}{\rho}\mathrm{d}y dρ=ρxdx+ρydy
于是有:
∂ ρ ∂ x = x ρ = cos φ , ∂ y ∂ ρ = y ρ = sin φ \dfrac{\partial \rho}{\partial x}=\frac{x}{\rho}=\cos\varphi, \dfrac{\partial y}{\partial \rho}=\frac{y}{\rho}=\sin\varphi ∂x∂ρ=ρx=cosφ,∂ρ∂y=ρy=sinφ
对第二个式子变换一下:
tan φ = y x \tan\varphi=\frac{y}{x} tanφ=xy
然后我们再求全微分:
1 cos 2 φ d φ = − y x 2 d x + 1 x d y \frac{1}{\cos^2\varphi}\mathrm{d}\varphi=-\frac{y}{x^2}\mathrm{d}x+\frac{1}{x}\mathrm{d}y cos2φ1dφ=−x2ydx+x1dy
于是得到
d φ = − y cos 2 φ x 2 d x + cos 2 φ x d y = − y ρ 2 d x + x ρ 2 d y = − sin φ ρ d x + cos φ ρ d y \mathrm{d}\varphi=-\frac{y\cos^2\varphi}{x^2}\mathrm{d}x+\frac{\cos^2\varphi}{x}\mathrm{d}y=-\frac{y}{\rho^2}\mathrm{d}x+\frac{x}{\rho^2}\mathrm{d}y=-\frac{\sin\varphi}{\rho}\mathrm{d}x+\frac{\cos\varphi}{\rho}\mathrm{d}y dφ=−x2ycos2φdx+xcos2φdy=−ρ2ydx+ρ2xdy=−ρsinφdx+ρcosφdy
于是有:
∂ φ ∂ x = − sin φ ρ , ∂ φ ∂ y = cos φ ρ \frac{\partial \varphi}{\partial x}=\frac{-\sin\varphi}{\rho}, \frac{\partial \varphi}{\partial y}=\frac{\cos\varphi}{\rho} ∂x∂φ=ρ−sinφ,∂y∂φ=ρcosφ
∂ ( ρ , φ ) ∂ ( x , y ) = [ ∂ ρ ∂ x ∂ ρ ∂ y ∂ φ ∂ x ∂ φ ∂ y ] = [ cos φ sin φ − sin φ ρ cos φ ρ ] \dfrac{\partial(\rho,\varphi)}{\partial(x,y)}=\begin{bmatrix} \dfrac{\partial \rho}{\partial x} & \dfrac{\partial \rho}{\partial y}\\ \dfrac{\partial \varphi}{\partial x}&\dfrac{\partial \varphi}{\partial y} \end{bmatrix}=\begin{bmatrix} \cos\varphi &\sin\varphi\\ \dfrac{-\sin\varphi}{\rho}&\dfrac{\cos\varphi}{\rho} \end{bmatrix} ∂(x,y)∂(ρ,φ)= ∂x∂ρ∂x∂φ∂y∂ρ∂y∂φ = cosφρ−sinφsinφρcosφ
4.2 求逆
这里刚好是一个二阶方阵,所以可以直接对3中的雅克比矩阵求逆:
∂ ( ρ , φ ) ∂ ( x , y ) = ( ∂ ( x , y ) ∂ ( ρ , φ ) ) − 1 = [ cos φ − ρ sin φ sin φ ρ cos φ ] − 1 = [ cos φ sin φ − sin φ ρ cos φ ρ ] \dfrac{\partial(\rho,\varphi)}{\partial(x,y)}=\left(\dfrac{\partial(x,y)}{\partial(\rho,\varphi)}\right)^{-1}=\begin{bmatrix} \cos\varphi &-\rho\sin\varphi\\ \sin\varphi &\rho\cos\varphi \end{bmatrix}^{-1}{}=\begin{bmatrix} \cos\varphi &\sin\varphi\\ \dfrac{-\sin\varphi}{\rho}&\dfrac{\cos\varphi}{\rho} \end{bmatrix} ∂(x,y)∂(ρ,φ)=(∂(ρ,φ)∂(x,y))−1=[cosφsinφ−ρsinφρcosφ]−1= cosφρ−sinφsinφρcosφ
相关文章:

极坐标和直角坐标的雅克比矩阵推导
我们经常需要在一些问题中研究坐标系的关系,这里讲讲最常见的极坐标和直角坐标的雅克比矩阵的推导。以二维坐标为例,三维坐标也是同理。 1. 直角坐标和极坐标 直角坐标表示为 ( x , y ) (x,y) (x,y),极坐标表示为 ( ρ , φ ) (\rho,\varph…...

经管博士科研基础【25】概率论中的相关基础概念
1. Support 在概率论中,"support"(支撑集)是指随机变量可能取值的集合。对于离散型随机变量,支撑集包含了所有可能的取值;而对于连续型随机变量,支撑集是指其密度函数或概率质量函数非零的区域。…...
)
计算机网络的相关知识点总结(一)
1.谈一谈对OSI七层模型和TCP/IP四层模型的理解? 不管是OSI七层模型亦或是TCP/IP四层模型,它们的提出都有一个共同的目的:通过分层来将复杂问题细化,通过各个层级之间的相互配合来更好的解决计算机中出现的问题。 说到分层…...
下载github.com上的依赖资源
下载github.com上的依赖资源(需要反复试才能成功,所以单独安装) export GIT_TRACE1 export GIT_CURL_VERBOSE1 pip install githttps://github.com/PanQiWei/AutoGPTQ.git -i https://pypi.mirrors.ustc.edu.cn/simple --trusted-hostpypi.mi…...

编写 GPT 提示词的公式 + 资源分享
GPT 能够给我们带来很大的帮助,因此我们要好好利用它。我们希望 GPT 输出令我们满意的内容,影响 GPT 输出内容的因素有模型和输入(Prompt,提示词)。 模型:我们可以选择不同的 GPT 产品,它们的模…...

用HTML、CSS和JavaScript制作的通用进制转换器
随着编程和计算机科学越来越受欢迎,我们经常需要进行进制转换。本文将介绍一个简洁、美观、适用于移动设备的进制转换工具,并详细讨论其实现。 目录 🌍 用HTML、CSS和JavaScript制作的通用进制转换器 1.项目图片展示 2. 技术栈 3. 主要功…...
ArcGIS 10.3软件安装包下载及安装教程!
【软件名称】:ArcGIS 10.3 【安装环境】:Windows 【下载链接 】: 链接:https://pan.baidu.com/s/1K5ab7IHMYa23HpmuPkFa1A 提取码:oxbb 复制这段内容后打开百度网盘手机App,操作更方便哦 软件解压码点击原文…...

【数据增强】
【数据增强】 1 数据增强的情形2 数据增强的方法 1 数据增强的情形 当数据比较小,难以获取新的训练数据时,可以考虑数据增强,如随机裁剪部分,随机左右上下翻转、随机旋转一个角度、随机亮度变化等微小变化,数据的多样…...

Ae 效果:CC Force Motion Blur
时间/CC Force Motion Blur Time/CC Force Motion Blur CC Force Motion Blur (CC 强制运动模糊)主要用于为动态图像添加强制的运动模糊效果,增加动态画面的流畅感和真实感。 相对于时间轴面板上的“运动模糊”开关,CC Force Moti…...

2023华为杯研究生数学建模竞赛CDEF题思路+模型代码
全程更新华为杯研赛CDEF题思路模型及代码,大家查看文末名片获取 华为杯C题思路分析 问题一 在每个评审阶段,作品通常都是随机分发的,每份作品需要多位评委独立评审。为了增加不同评审专家所给成绩之间的可比性,不同专家评审的作…...

FP独立站之黑科技:AB站收款、斗篷CLOAK
最近一段时间经常有不少小伙伴来咨询我独立站的相关的业务,因为很多独立站卖家觉得独立站不好做,再加上跨境平台禁止特货类产品的销售(如FP产品、成人用品、电子烟、灰黑类产品等等),但这类产品市场需求大,…...
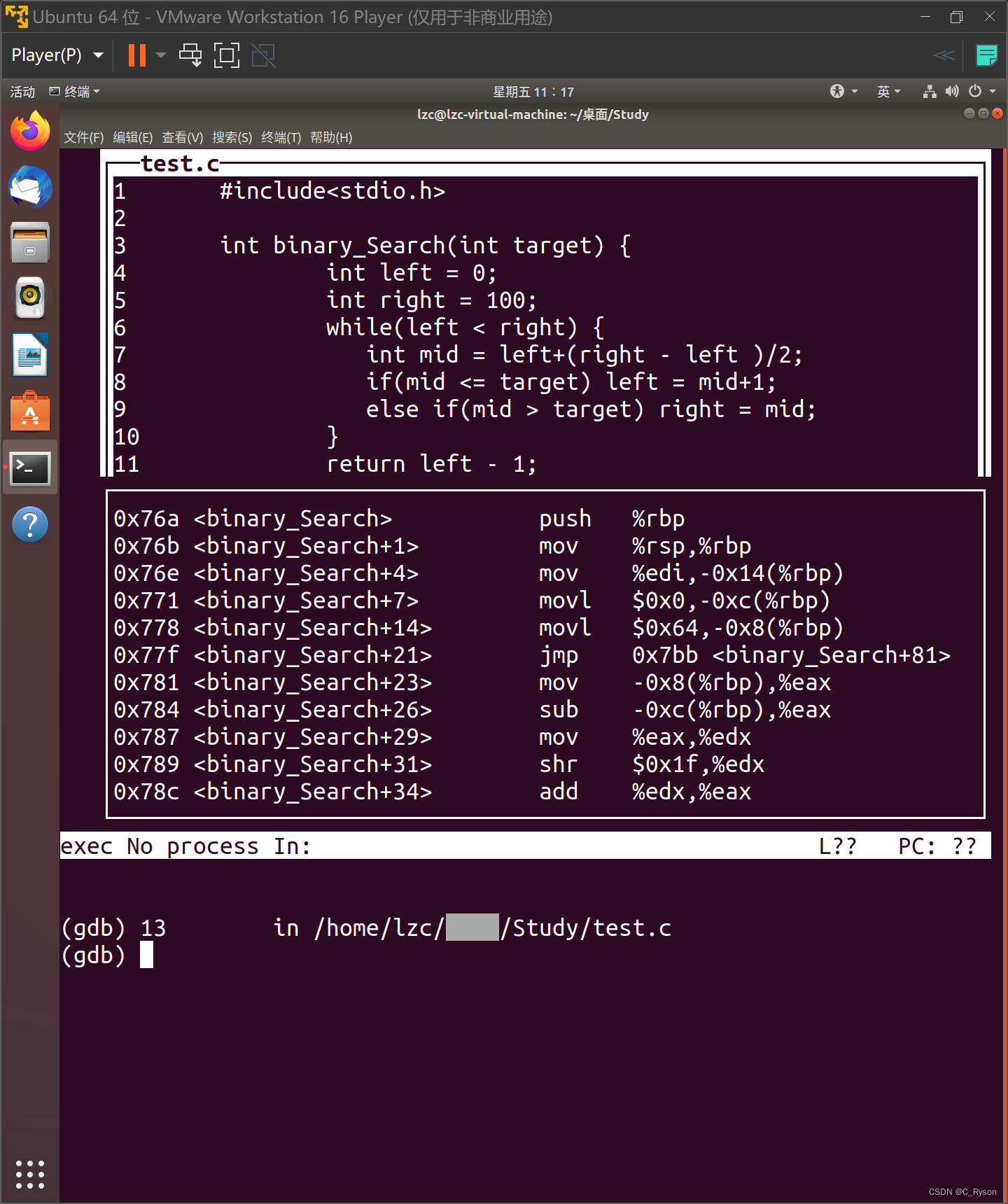
【Linux网络编程】gdb调试技巧
这篇博客主要要记录一下自己在Linux操作系统Ubuntu下使用gbd调试程序的一些指令,以及使用过程中的一些心得。 使用方法 可以使用如下代码 gcc -g test.c -o test 或者 gcc test.c -o test -g的选项最好添加,如果不添加,l指令无法被识别 …...
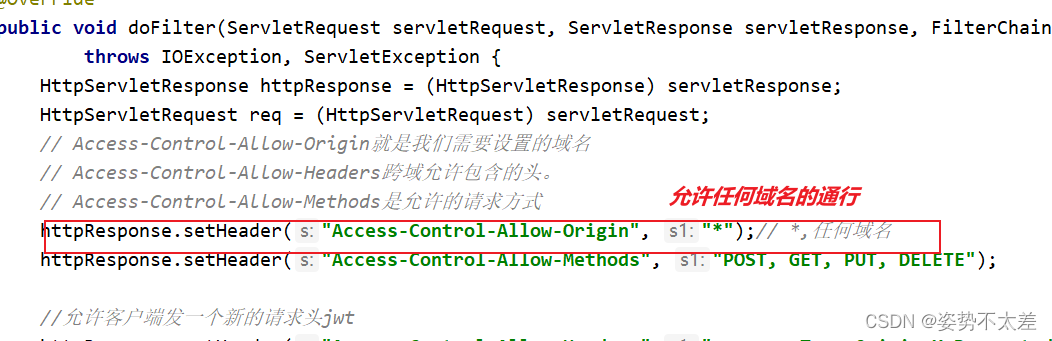
ElementUI之登录与注册
目录 一.前言 二.ElementUI的简介 三.登录注册前端界面的开发 三.vue axios前后端交互--- Get请求 四.vue axios前后端交互--- Post请求 五.跨域问题 一.前言 这一篇的知识点在前面两篇的博客中就已经详细详解啦,包括如何环境搭建和如何建一个spa项目等等知识…...

报错处理:Error: Redis server is running but Redis CLI cannot connect
嗨,读者朋友们!今天我来跟大家分享一个我在运维过程中遇到的一个关于Linux上运行Redis服务时的报错及解决方法。 报错信息如下: Error: Redis server is running but Redis CLI cannot connect 这个报错信息表明Redis服务器已经运行ÿ…...

RocketMQ 源码分析——Producer
文章目录 消息发送代码实现消息发送者启动流程检查配置获得MQ客户端实例启动实例定时任务 Producer 消息发送流程选择队列默认选择队列策略故障延迟机制策略*两种策略的选择 技术亮点:ThreadLocal 消息发送代码实现 下面是一个生产者发送消息的demo(同步发送&#…...

ISTQB术语表
此术语表为国际软件测试认证委员会(ISTQB)发布的标准术语表。此表历经数次修改、完善,集纳了计算机行业界、商业界及政府相关机构的见解及意见,在国际化的层面上达到了罕有的统一性及一致性。参与编制此表的国际团体包括澳大利亚、…...
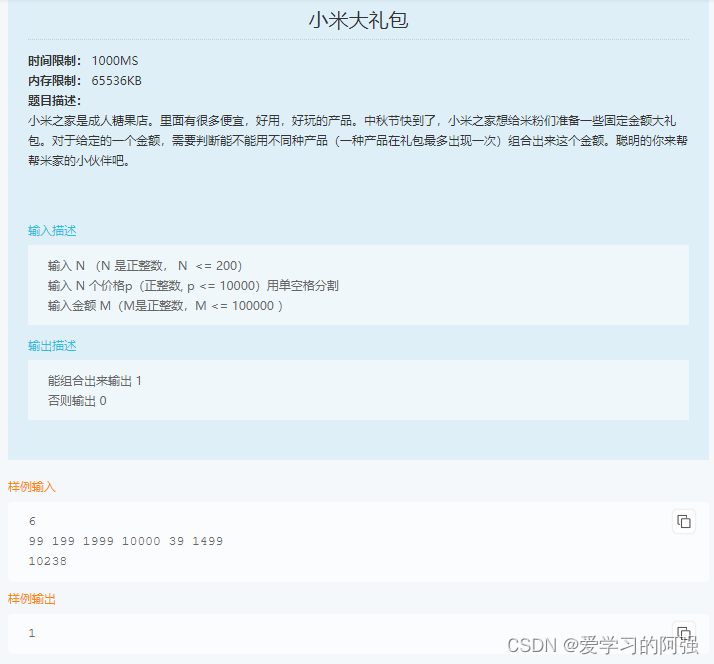
小米笔试题——01背包问题变种
这段代码的主要思路是使用动态规划来构建一个二维数组 dp,其中 dp[i][j] 表示前 i 个产品是否可以组合出金额 j。通过遍历产品列表和可能的目标金额,不断更新 dp 数组中的值,最终返回 dp[N][M] 来判断是否可以组合出目标金额 M。如果 dp[N][M…...

SkyWalking内置MQE语法
此文档出自SkyWalking官方git https://github.com/apache/skywalking docs/en/api/metrics-query-expression.md Metrics Query Expression(MQE) Syntax MQE is a string that consists of one or more expressions. Each expression could be a combination of one or more …...
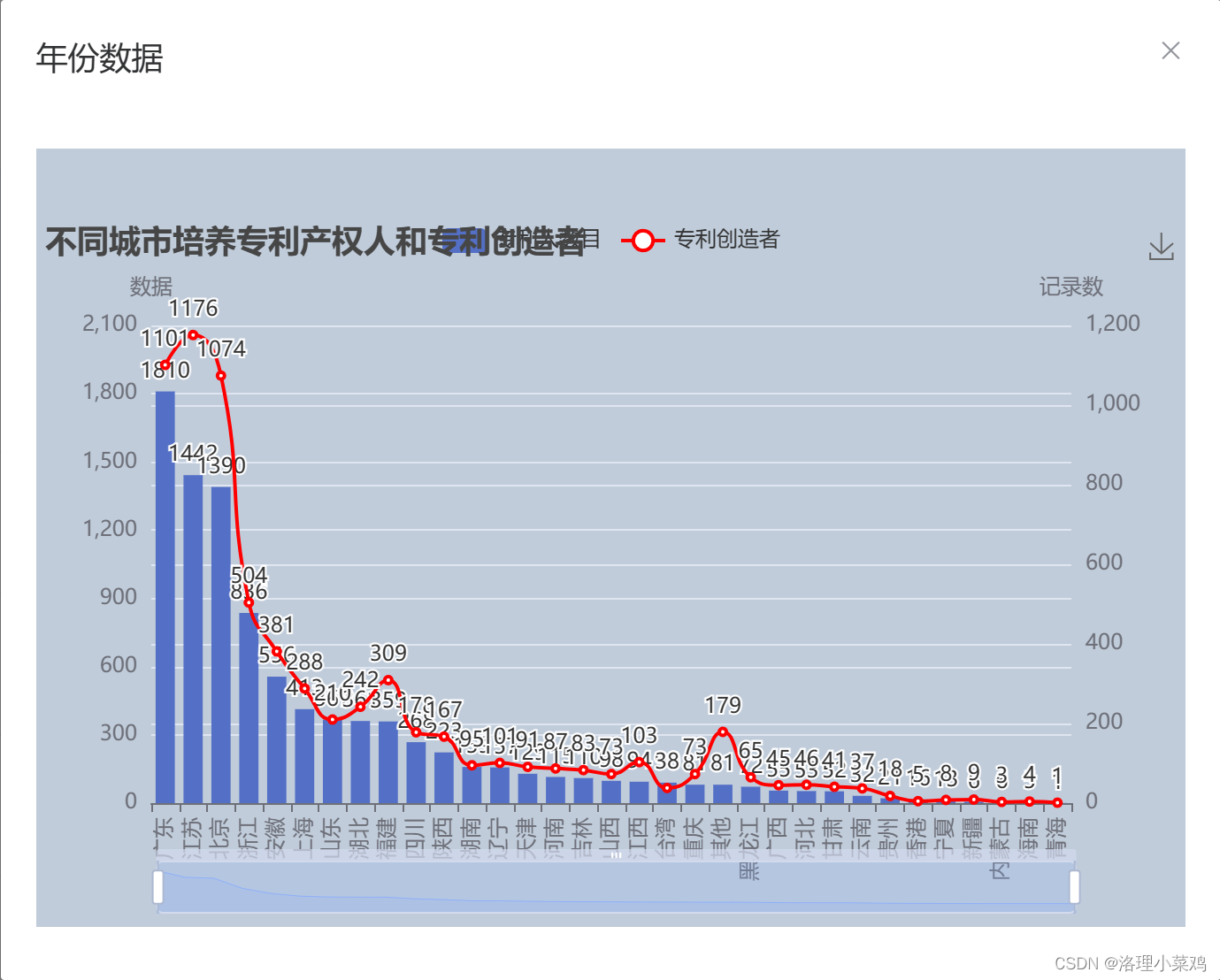
Springboot2 Pandas Pyecharts 量子科技专利课程设计大作业
数据集介绍 1.背景 根据《中国科学:信息科学》期刊上的一篇文章,量子通信包括多种协议与应用类型: 基于量子隐形传态与量子存储中继等技术,可实现量子态信息传输,进而构建量子信息网络,已成为当前科研热点&…...

RabbitMQ里的几个重要概念
RabbitMQ中的一些角色: publisher:生产者consumer:消费者exchange个:交换机,负责消息路由,接受生产者发送的消息,把消息发送到一个或多个队列里queue:队列,存储消息virt…...
)
【Sora 2视频集成终极指南】:ChatGPT原生调用、API对接、帧级控制与多模态工作流落地实录(2024官方SDK首曝)
更多请点击: https://intelliparadigm.com 第一章:ChatGPT Sora 2视频集成功能详解 ChatGPT Sora 2 并非官方发布的模型名称,而是社区对 OpenAI 视频生成能力演进方向的一种泛称。当前(截至 2024 年中),O…...

手把手教你用RecFusion和3D Scan:Kinect v2与RealSense D435三维重建完整流程与软件配置
手把手教你用RecFusion和3D Scan:Kinect v2与RealSense D435三维重建完整流程与软件配置 刚拿到Kinect v2或RealSense D435时,许多开发者最迫切的需求不是理解原理,而是快速完成第一次三维扫描。本文将用最简明的操作流,带你在30分…...

片上网络架构设计:集体通信硬件加速与优化
1. 轻量级片上网络架构设计解析 在当今机器学习(ML)模型规模呈指数级增长的背景下,大规模并行加速器已成为支撑AI计算的关键基础设施。这类系统通常采用数千个处理单元(PE)的集成设计,而连接这些计算资源的片上网络(NoC)性能直接决定了整个系统的效率瓶颈…...

NCM音乐解锁终极指南:3步实现网易云音乐格式自由转换
NCM音乐解锁终极指南:3步实现网易云音乐格式自由转换 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的NCM加密文件无法在其他播放器使用而烦恼吗?ncmdump解密工具让你轻松突破格式限制&…...
)
从零到一:手把手教你为Nachos实现Exec和Exit系统调用(附完整代码与调试技巧)
从零构建Nachos系统调用:Exec与Exit的深度实现指南 1. 系统调用实现基础 在操作系统中,系统调用是用户程序与内核交互的唯一途径。Nachos作为一个教学用操作系统框架,其系统调用机制模拟了真实操作系统的核心设计思想。 寄存器交互机制是系统…...

2026年5月AI编程工具最新横评
摘要本文基于2026年4-5月AtomGit开源社区、SegmentFault等平台的最新实测数据,覆盖当前市占率最高的5款主流AI编程工具,从功能、价格、适用场景三个维度拆解优劣,不管你是学生、职场开发者还是独立开发者,都能直接抄作业选到最适合…...

对立统一的物理本质:黑洞视界动力学
粒子极微黑洞模型将对立统一规律从抽象的哲学辩证法还原为具体的物理动力学过程,其物理本体、动力学根源与几何载体正是全域嵌套的拓扑黑洞结构及其视界动力学。核心在于,黑洞视界本身就是一个天然的、动态的二元对立统一体。1. 对立统一:黑洞…...

SAS协议深度解析:数据中心存储的基石与未来演进
1. 项目概述:SAS协议的现状与未来如果你在数据中心存储领域待过几年,肯定听过一种论调:“SAS(Serial Attached SCSI)快不行了,NVMe over PCIe才是未来。” 这话听起来挺有道理,毕竟NVMe SSD那动…...

别再重复画框了!用AutoCAD 2019/2023的DWG to PDF,一次搞定所有非标图纸尺寸
高效图纸输出:AutoCAD自定义纸张尺寸的终极管理方案 在工程设计领域,图纸输出是工作流程中不可或缺的一环。无论是建筑平面图、机械零件图还是电气布线图,专业设计人员经常面临各种非标准尺寸图纸的输出需求。传统解决方案往往需要反复创建相…...

从强化学习视角看HDP:ADP中的Actor-Critic框架到底怎么工作的?
从强化学习视角看HDP:ADP中的Actor-Critic框架到底怎么工作的? 在控制理论与机器学习交叉领域,自适应动态规划(ADP)与强化学习(RL)的融合正催生新一代智能控制范式。当我们以RL从业者熟悉的Act…...