竞赛选题 基于深度学习的视频多目标跟踪实现
文章目录
- 1 前言
- 2 先上成果
- 3 多目标跟踪的两种方法
- 3.1 方法1
- 3.2 方法2
- 4 Tracking By Detecting的跟踪过程
- 4.1 存在的问题
- 4.2 基于轨迹预测的跟踪方式
- 5 训练代码
- 6 最后
1 前言
🔥 优质竞赛项目系列,今天要分享的是
基于深度学习的视频多目标跟踪实现
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 多目标跟踪的两种方法
3.1 方法1
基于初始化帧的跟踪,在视频第一帧中选择你的目标,之后交给跟踪算法去实现目标的跟踪。这种方式基本上只能跟踪你第一帧选中的目标,如果后续帧中出现了新的物体目标,算法是跟踪不到的。这种方式的优点是速度相对较快。缺点很明显,不能跟踪新出现的目标。
3.2 方法2
基于目标检测的跟踪,在视频每帧中先检测出来所有感兴趣的目标物体,然后将其与前一帧中检测出来的目标进行关联来实现跟踪的效果。这种方式的优点是可以在整个视频中跟踪随时出现的新目标,当然这种方式要求你前提得有一个好的“目标检测”算法。
学长主要分享Option2的实现原理,也就是Tracking By Detecting的跟踪方式。
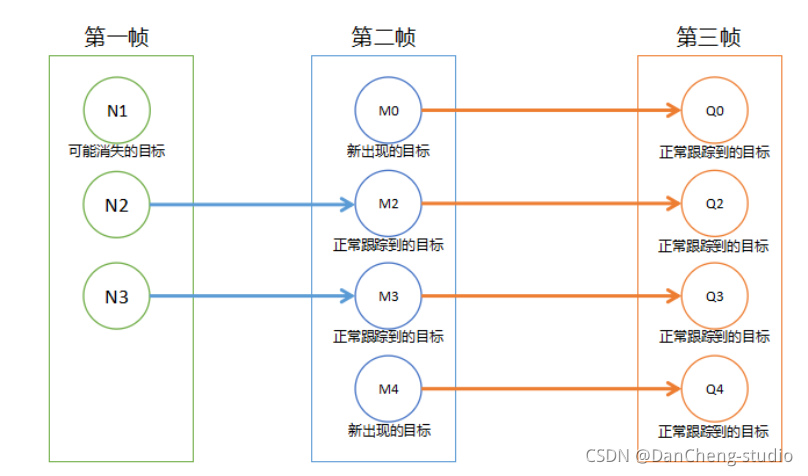
4 Tracking By Detecting的跟踪过程
**Step1:**使用目标检测算法将每帧中感兴趣的目标检测出来,得到对应的(位置坐标, 分类, 可信度),假设检测到的目标数量为M;
**Step2:**通过某种方式将Step1中的检测结果与上一帧中的检测目标(假设上一帧检测目标数量为N)一一关联起来。换句话说,就是在M*N个Pair中找出最像似的Pair。
对于Step2中的“某种方式”,其实有多种方式可以实现目标的关联,比如常见的计算两帧中两个目标之间的欧几里得距离(平面两点之间的直线距离),距离最短就认为是同一个目标,然后通过匈牙利算法找出最匹配的Pair。当让,你还可以加上其他的判断条件,比如我用到的IOU,计算两个目标Box(位置大小方框)的交并比,该值越接近1就代表是同一个目标。还有其他的比如判断两个目标的外观是否相似,这就需要用到一种外观模型去做比较了,可能耗时更长。
在关联的过程中,会出现三种情况:
1)在上一帧中的N个目标中找到了本次检测到的目标,说明正常跟踪到了;
2)在上一帧中的N个目标中没有找到本次检测到的目标,说明这个目标是这一帧中新出现的,所以我们需要把它记录下来,用于下下一次的跟踪关联;
3)在上一帧中存在某个目标,这一帧中并没有与之关联的目标,那么说明该目标可能从视野中消失了,我们需要将其移除。(注意这里的可能,因为有可能由于检测误差,在这一帧中该目标并没有被检测到)
4.1 存在的问题
上面提到的跟踪方法在正常情况下都能够很好的工作,但是如果视频中目标运动得很快,前后两帧中同一个目标运动的距离很远,那么这种跟踪方式就会出现问题。
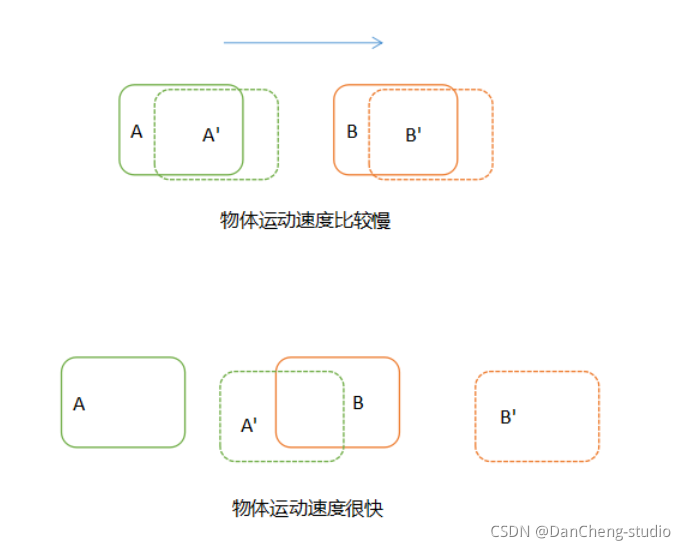
如上图,实线框表示目标在第一帧的位置,虚线框表示目标在第二帧的位置。当目标运行速度比较慢的时候,通过之前的跟踪方式可以很准确的关联(A, A’)和(B,
B’)。但是当目标运行速度很快(或者隔帧检测)时,在第二帧中,A就会运动到第一帧中B的位置,而B则运动到其他位置。这个时候使用上面的关联方法就会得到错误的结果。
那么怎样才能更加准确地进行跟踪呢?
4.2 基于轨迹预测的跟踪方式
既然通过第二帧的位置与第一帧的位置进行对比关联会出现误差,那么我们可以想办法在对比之前,先预测目标的下一帧会出现的位置,然后与该预测的位置来进行对比关联。这样的话,只要预测足够精确,那么几乎不会出现前面提到的由于速度太快而存在的误差
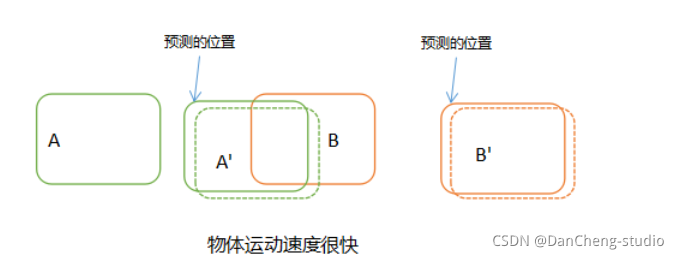
如上图,我们在对比关联之前,先预测出A和B在下一帧中的位置,然后再使用实际的检测位置与预测的位置进行对比关联,可以完美地解决上面提到的问题。理论上,不管目标速度多么快,都能关联上。那么问题来了,怎么预测目标在下一帧的位置?
方法有很多,可以使用卡尔曼滤波来根据目标前面几帧的轨迹来预测它下一帧的位置,还可以使用自己拟合出来的函数来预测下一帧的位置。实际过程中,我是使用拟合函数来预测目标在下一帧中的位置。
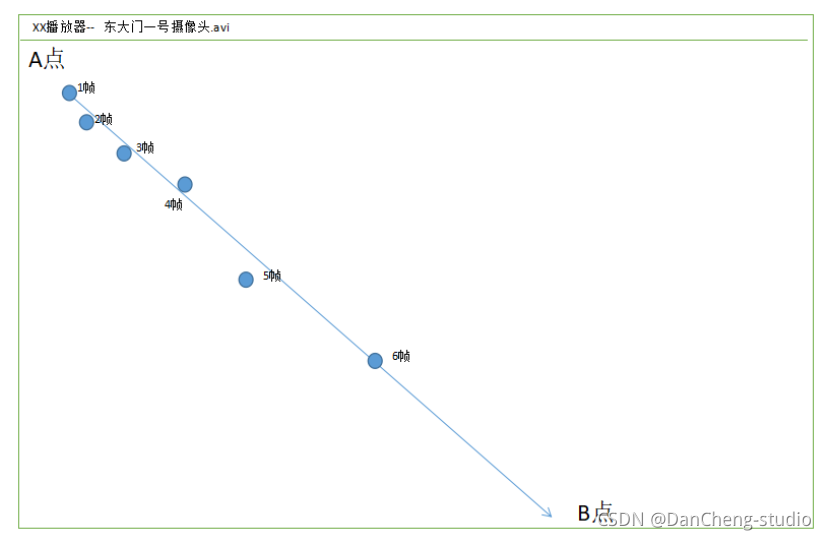
如上图,通过前面6帧的位置,我可以拟合出来一条(T->XY)的曲线(注意不是图中的直线),然后预测目标在T+1帧的位置。具体实现很简单,Python中的numpy库中有类似功能的方法。
5 训练代码
这里记录一下训练代码,来日更新
if FLAGS.mode == 'eager_tf':# Eager mode is great for debugging# Non eager graph mode is recommended for real trainingavg_loss = tf.keras.metrics.Mean('loss', dtype=tf.float32)avg_val_loss = tf.keras.metrics.Mean('val_loss', dtype=tf.float32)for epoch in range(1, FLAGS.epochs + 1):for batch, (images, labels) in enumerate(train_dataset):with tf.GradientTape() as tape:outputs = model(images, training=True)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_lossgrads = tape.gradient(total_loss, model.trainable_variables)optimizer.apply_gradients(zip(grads, model.trainable_variables))logging.info("{}_train_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_loss.update_state(total_loss)for batch, (images, labels) in enumerate(val_dataset):outputs = model(images)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_losslogging.info("{}_val_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_val_loss.update_state(total_loss)logging.info("{}, train: {}, val: {}".format(epoch,avg_loss.result().numpy(),avg_val_loss.result().numpy()))avg_loss.reset_states()avg_val_loss.reset_states()model.save_weights('checkpoints/yolov3_train_{}.tf'.format(epoch))
6 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
竞赛选题 基于深度学习的视频多目标跟踪实现
文章目录 1 前言2 先上成果3 多目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 基于深度学习的视频多目标跟踪实现 …...
分布式应用之监控平台zabbix的认识与搭建
一、监控系统的相关知识 1.1 监控系统运用的原因 当我们需要实时关注与其相关的各项指标是否正常,往往存在着很多的服务器、网络设备等硬件资源,如果我们想要能够更加方便的、集中的监控他们,zabix可以实现集中监控管理的应用程序 监控的…...

C语言大佬的必杀技---宏的高级用法
C语言大佬的必杀技—宏的高级用法 目录: 字符串化标记的拼接宏的嵌套替换多条语句防止一个文件被重复包含宏和函数的区别 可能大家在学习的时候用得比较少,但是在一些代码量比较大的时候,这样使用,可以大大的提高代码的可读性,…...

@Retryable和Guava retry
文章目录 一、spring的Retryable1.1 作用:1.2链接:https://www.cnblogs.com/EasonJim/p/7684649.html1.3 坑1.4 Recover补充依赖 二、Guava-retry:使用 一、spring的Retryable 1.1 作用: Retryable注解,被注解的方法…...
conda的安装和使用
参考资料: https://www.bilibili.com/read/cv8956636/?spm_id_from333.999.0.0 https://www.bilibili.com/video/BV1Mv411x775/?spm_id_from333.999.0.0&vd_source98d31d5c9db8c0021988f2c2c25a9620 目录 conda是啥以及作用conda的安装conda的启动conda的配置…...

K8S:pod集群调度及相关操作
文章目录 一.pod集群调度概念1.调度约束( List-Watch组件)2.List-Watch的工作机制(1)List-Watch的工作机制流程(2)List-Watch的工作机制图示 3.调度的过程(1)调度的任务(2)调度选择p…...

阿里云便宜服务器2核2G配置经济型e实例一年182元性能测评
阿里云服务器经济型e实例2核2G配置优惠价格182.04元一年,系统盘ESSD Entry盘20GB起,公网带宽默认按使用流量,也可以选择按固定带宽计费,带宽值从1M到100M可选,阿腾云分享阿里云服务器2核2G优惠价格、详细配置及e系列CP…...

资讯| 工信部拟筹建元宇宙标准化工作组;《权游》作者起诉OpenAI
元宇宙赛道 工信部:优先开展“元宇宙 工业制造”等行业应用标准研制 9月18日,工业和信息化部科技司就《工业和信息化部元宇宙标准化工作组筹建方案(征求意见稿)》(以下简称《方案》)公开征求意见。 工业…...

Win10安装Docker Desktop并运行Tutorial示例
背景 前段时间一个项目需要在开发环境直接使用 Docker ,为了省事便计划在本地安装 Desktop 版的 Docker 。其实安装过程比较简单,可视化安装即可,主要是对安装与初步使用时遇到的问题做个记录。 下载安装 下载地址:https://dow…...

1、靶机——Pinkys-Place v3(1)
文章目录 一、环境二、获取flag11、扫描局域网内存活主机1.1 查看kali的IP地址1.2 扫描存活主机 2、粗略扫描靶机端口(服务)3、寻找ftp服务漏洞4、扫描端口详细信息5、匿名登录ftp 一、环境 攻击机:kali 靶机:Pinkys-Place v3&am…...
【AIGC】Stable Diffusion Prompt 每日一练0916
一、前言 1.1 写在前面 本文是一个系列,有点类似随笔,每天一次更新,重点就Stable Diffusion Prompt进行专项训练,本文是第022篇《Stable Diffusion Prompt 每日一练0916》。上一篇《Stable Diffusion Prompt 每日一练0915》 1.…...
【C语言】指针经典笔试题(上)
C语言的一大重头戏就是指针。 对于指针有一些认识: 1.指针是存放变量的地址,一般说的指针和指针变量是一个概念。 2.地址的单位是字节,大小在不同编译器环境下有所不同,32位机器是4个字节,64位机器是8个字节。 3.数组名…...

缓存问题解决方案
《服务器开发技术、方法与实用解决方案》 一、缓存预热 在系统刚启动或活动刚开始时,如果缓存中没有数据,那么大量请求将直接访问数据库。如果瞬时访问流量巨大,则可能导致数据库因过载而宕机,甚至引发系统雪崩。因此需要将缓存…...

数据结构————寻路算法
(一)基础补充 二维数组 定义:基本概念与方法和一维数组相似,一般形式为:类型符 数组名[常量表达式][常量表达式]; 其中,数组长度只能是常量;通常把二维数组第一个下标理解成行,第二个下标为列,常量表达式: 表达式里面只有常量的式子(如数字类常量); 二维数组常…...
蓝桥杯 题库 简单 每日十题 day7
01 啤酒和饮料 题目描述 本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。啤酒每罐2.3元,饮料每罐1.9元。小明买了若干啤酒和饮料,一共花了82.3元。我们还知道他买的啤酒比饮料的数量少,请你…...

go -- 获取当前24点的时间戳 --chatGpt
gpt: 要获取当前24点的时间戳,你可以使用 Go 标准库中的 time 包来实现。以下是一个示例函数,它可以获取当前日期的24点的时间戳: go package main import ( "fmt" "time" ) func getMidnightTimestamp() in…...

docker 容器内手动设置服务自启动
需求描述:不使用DockerFile实现容器内的服务自动启动 1、创建执行程序,以crond为例 //进入容器xxx docker exec -it xxx /bin/sh //切换root账户 bash //创建自动执行文件 vim /root/cron.sh2、自动执行文件内容 crond start3、修改执行文件权限 chmod x /root/…...
腾讯云微服务平台 TSF 异地多活单元化能力重磅升级
导语 2023腾讯全球数字生态大会已于9月7-8日完美落幕,40专场活动展示了腾讯最新的前沿技术、核心产品、解决方案。 微服务与消息队列专场,腾讯云微服务平台 TSF 产品经理张桢带来了《腾讯云微服务平台 TSF 异地多活单元化能力重磅升级》的精彩演讲。本…...

01贪心:算法理论知识
贪心:01算法理论知识 什么是贪心 贪心的本质是选择每一阶段的局部最优,从而达到全局最优。 这么说有点抽象,来举一个例子: 例如,有一堆钞票,你可以拿走十张,如果想达到最大的金额࿰…...
目标分类笔记(二): 利用PaddleClas的框架来完成多标签分类任务(从数据准备到训练测试部署的完整流程)
文章目录 一、演示多分类效果二、PaddleClas介绍三、代码获取四、数据集获取五、环境搭建六、数据格式分析七、模型训练7.1 模型恢复训练7.2 多卡训练7.3 其他训练指标 八、模型预测九、模型评估十、PaddleClas相关博客 一、演示多分类效果 二、PaddleClas介绍 PaddleClas主要…...

抖音无水印下载神器:3分钟实现高效批量下载的完整指南
抖音无水印下载神器:3分钟实现高效批量下载的完整指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback suppo…...

怎么降维普AI率到30%以下?本科合格区间实战完整路径方案!
怎么降维普AI率到30%以下?本科合格区间实战完整路径方案! 本科生维普 AI 率合格线 30%,比硕博严标准 15% 宽松一倍。但如果你的论文 AI 率 60% 重灾区,降到 30% 以下还是需要工具。你的真实情况是什么? 本科 4-5 万字论…...

实测Taotoken平台API调用稳定性与延迟体感观察记录
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 实测Taotoken平台API调用稳定性与延迟体感观察记录 在将大模型能力集成到生产应用时,服务的稳定性和响应延迟是开发者关…...

实测推荐!2026年毕业论文5000字范文免费下载AI写作工具排行,查重降AI率全攻略
本文由知学术AIPaperGPT内容团队实测撰写 2026-05-11实测推荐!2026年毕业论文5000字范文免费下载AI写作工具排行,查重降AI率全攻略又是一年毕业季,无数本科、硕士生正为毕业…...

如何用JPlag守护代码原创性:5分钟快速上手指南
如何用JPlag守护代码原创性:5分钟快速上手指南 【免费下载链接】JPlag State-of-the-Art Source Code Plagiarism & Collusion Detection. Check for plagiarism in a set of programs. 项目地址: https://gitcode.com/gh_mirrors/jp/JPlag 你是否曾担心…...

心灵鸡汤01 - 人生九不争
一、跟父母,不争口舌; 二、跟朋友,不争面子; 三、跟领导,不争高低; 四、跟小人,不争道理; 五、跟伴侣,不争对错; 六、跟亲戚,不争穷富;…...

S905M芯片盒子救砖实战:8189ETV无线与NAND存储的线刷固件修复指南
1. 救砖前的准备工作 当你发现手里的辽宁移动数码视讯Q5盒子突然变砖,先别急着扔。这种采用S905M芯片的盒子其实有很高的可玩性,尤其是搭配8189ETV无线模块和NAND存储的方案,只要掌握正确方法,救砖成功率很高。我前前后后折腾过二…...

终极抢票指南:如何用DamaiHelper轻松获取演唱会门票
终极抢票指南:如何用DamaiHelper轻松获取演唱会门票 【免费下载链接】damaihelper 支持大麦网,淘票票、缤玩岛等多个平台,演唱会演出抢票脚本 项目地址: https://gitcode.com/gh_mirrors/dam/damaihelper 你是否曾为抢不到心仪演唱会门…...

Nevis‘22基准:评估持续学习模型的计算效率与知识迁移能力
1. 项目概述:为什么我们需要一个全新的终身学习基准?在计算机视觉乃至整个机器学习领域,我们正面临一个日益尖锐的矛盾:一方面,我们希望模型能够像人类一样,在漫长的时间里持续学习新知识,不断进…...

从仿真结果到科研图表:手把手教你用Tonyplot处理Silvaco TCAD数据
从仿真结果到科研图表:手把手教你用Tonyplot处理Silvaco TCAD数据 在半导体器件研究中,TCAD仿真数据的可视化呈现往往决定着研究成果的传达效果。许多研究者花费大量时间完成Silvaco仿真后,却苦于无法将原始数据转化为符合学术出版要求的专业…...