C语言 cortex-A7核 点LED灯 (附 汇编实现、使用C语言 循环实现、使用C语言 封装函数实现【重要、常用】)
1 汇编实现
text
global _start
start:
************** LED1点灯 ---> PE10 **************/
************** RCC章节初始化 **************/
CC_INIT:@1.使能GPIOE组控制器,通过RCC_MP_AHB4ENSETR寄存器设置GPIOE组使能0x50000A28[4]= 1ldr r0,=0x50000A28 @准备一块地址空间0x50000A28ldr r1,[r0] @将0x50000A28这块地址中的内容,读到目标寄存器r1中orr r1,r1,#(0x3 << 4) @将r1寄存器第[5:4] = 11,保证其他位不变 str r1,[r0] @将r1寄存器中的值,写回0x50000A28这块地址空间中************** LED1对应GPIO章节初始化 **************/
ED1_INIT:@1.通过GPIOE_MODER寄存器,设置PE10引脚为 输出模式 0x50006000[21:20] = 01ldr r0,=0x50006000ldr r1,[r0]orr r1,r1,#(0x3 << 20)and r1,r1,#(~(0x1 << 21))str r1,[r0]@2.通过GPIOE_OTYPER寄存器,设置PE10引脚为 推挽输出类型 0x50006004[10] = 0ldr r0,=0x50006004ldr r1,[r0]and r1,r1,#(~(0x1 << 10))str r1,[r0]@3.通过GPIOE_OSPEEDR寄存器,设置PE10引脚为 低速输出 0x50006008[21:20] = 00ldr r0,=0x50006008ldr r1,[r0]and r1,r1,#(~(0x3 << 20))str r1,[r0]@4.通过GPIOE_PUPDR寄存器,设置PE10引脚 禁止上下拉电阻 0x5000600C[21:20] = 00ldr r0,=0x5000600Cldr r1,[r0]and r1,r1,#(~(0x3 << 20))str r1,[r0]************** LED2对应GPIO章节初始化 **************/
ED2_INIT:@1.通过GPIOE_MODER寄存器,设置PF10引脚为 输出模式 0x50007000[21:20] = 01ldr r0,=0x50007000ldr r1,[r0]orr r1,r1,#(0x3 << 20)and r1,r1,#(~(0x1 << 21))str r1,[r0]@2.通过GPIOE_OTYPER寄存器,设置PF10引脚为 推挽输出类型 0x50007004[10] = 0ldr r0,=0x50007004ldr r1,[r0]and r1,r1,#(~(0x1 << 10))str r1,[r0]@3.通过GPIOE_OSPEEDR寄存器,设置PF10引脚为 低速输出 0x50007008[21:20] = 00ldr r0,=0x50007008ldr r1,[r0]and r1,r1,#(~(0x3 << 20))str r1,[r0]@4.通过GPIOE_PUPDR寄存器,设置PF10引脚 禁止上下拉电阻 0x5000700C[21:20] = 00ldr r0,=0x5000700Cldr r1,[r0]and r1,r1,#(~(0x3 << 20))str r1,[r0]/************** LED3对应GPIO章节初始化 **************/
ED3_INIT:@1.通过GPIOE_MODER寄存器,设置PE8引脚为 输出模式 0x50006000[17:16] = 01ldr r0,=0x50006000ldr r1,[r0]orr r1,r1,#(0x3 << 16)and r1,r1,#(~(0x1 << 17))str r1,[r0]@2.通过GPIOE_OTYPER寄存器,设置PE8引脚为 推挽输出类型 0x50006004[8] = 0ldr r0,=0x50006004ldr r1,[r0]and r1,r1,#(~(0x1 << 8))str r1,[r0]@3.通过GPIOE_OSPEEDR寄存器,设置PE8引脚为 低速输出 0x50006008[17:16] = 00ldr r0,=0x50006008ldr r1,[r0]and r1,r1,#(~(0x3 << 16))str r1,[r0]@4.通过GPIOE_PUPDR寄存器,设置PE8引脚 禁止上下拉电阻 0x5000600C[17:16] = 00ldr r0,=0x5000600Cldr r1,[r0]and r1,r1,#(~(0x3 <<16))str r1,[r0]oop:bl LED1_ONbl delay_1sbl LED1_OFFbl delay_1sbl LED2_ONbl delay_1sbl LED2_OFFbl delay_1sbl LED3_ON bl delay_1sbl LED3_OFFbl delay_1sb Loop/************** LED1点亮 **************/
ED1_ON:@1.通过GPIOE_ODR寄存器,设置PE10引脚输出高电平 0x50006014[10] = 1ldr r0,=0x50006014ldr r1,[r0]orr r1,r1,#(0x1 << 10)str r1,[r0]mov pc,lr/************** LED1熄灭 **************/
ED1_OFF:@1.通过GPIOE_ODR寄存器,设置PE10引脚输出低电平 0x50006014[10] = 0ldr r0,=0x50006014ldr r1,[r0]bic r1,r1,#(0x1 << 10)str r1,[r0]mov pc,lr/************** LED2点亮 **************/
ED2_ON:@1.通过GPIOF_ODR寄存器,设置PE10引脚输出高电平 0x50007014[10] = 1ldr r0,=0x50007014ldr r1,[r0]orr r1,r1,#(0x1 << 10)str r1,[r0]mov pc,lr/************** LED2熄灭 **************/
ED2_OFF:@1.通过GPIOF_ODR寄存器,设置PE10引脚输出低电平 0x50006014[10] = 0ldr r0,=0x50007014ldr r1,[r0]bic r1,r1,#(0x1 << 10)str r1,[r0]mov pc,lr/************** LED3点亮 **************/
ED3_ON:@1.通过GPIOF_ODR寄存器,设置PE10引脚输出高电平 0x50006014[8] = 1ldr r0,=0x50006014ldr r1,[r0]orr r1,r1,#(0x1 << 8)str r1,[r0]mov pc,lr/************** LED3熄灭 **************/
ED3_OFF:@1.通过GPIOE_ODR寄存器,设置PE10引脚输出低电平 0x50006014[8] = 0ldr r0,=0x50006014ldr r1,[r0]bic r1,r1,#(0x1 << 8)str r1,[r0]mov pc,lr大概1s的延时函数
elay_1s:mov r3, #0x10000000mm:cmp r3, #0subne r3, r3, #1bne mmmov pc, lr
end
2 C语言实现
led.h
#ifndef __LED_H__
#define __LED_H__ //结构体封装
typedef struct{ volatile unsigned int MODER; volatile unsigned int OTYPER; volatile unsigned int OSPEEDR; volatile unsigned int PUPDR; volatile unsigned int IDR; volatile unsigned int ODR;
}gpio_t; #define GPIOE ((gpio_t*)0x50006000)
#define GPIOF ((gpio_t*)0x50007000)
#define RCC_MP_AHB4_ENSETR (*(volatile unsigned int*)0x50000A28) //LED1 ===> PE10
//RCC/GPIO章节初始化
void led1_rcc_gpio_init();
//LED1点亮
void led1_on();
//LED1熄灭
void led1_off();
//LED1 ===> PE10 //LED2 ===> PF10
//RCC/GPIO章节初始化
void led2_rcc_gpio_init();
//LED2点亮
void led2_on();
//LED2熄灭
void led2_off(); //LED3 ===> PE8
//RCC/GPIO章节初始化
void led3_rcc_gpio_init();
//LED3点亮
void led3_on();
//LED3熄灭
void led3_off();
#endif led.c
#include "led.h" //LED1 ---> PE10
//RCC/GPIO章节初始化
void led1_rcc_gpio_init()
{ //0、使能GPIOE组控制器,通过RCC_MP_AHB4_ENSETR寄存器设置GPIOE组使能0x50000A28[4] = 1 RCC_MP_AHB4_ENSETR |= (0X1 << 4); //1、通过GPIOE_MODER寄存器,设置PE10引脚为输出模式 0x50006000[21:20] = 01 GPIOE->MODER &= (~(0x1 << 21)); //21位清0 GPIOE->MODER |= (0x1 << 20); //20位置1 //2、通过GPIOE_OTYPER寄存器,设置PE10引脚为推挽输出类型 0x50006004[10] = 0 GPIOE->OTYPER &= (~(0x1 << 10)); //3、通过GPIOE_OSPEEDR寄存器,设置PE10引脚为低速输出 0x50006008[21:20] = 00 GPIOE->OSPEEDR &= (~(0x3 << 20)); //4、通过GPIOE_PUPDR寄存器,设置PE10引脚禁止上下拉电阻 0x5000600C[21:20] = 00 GPIOE->PUPDR &= (~(0x3 << 20));
} //LED1点亮
void led1_on()
{ //通过GPIOE_ODR寄存器,设置PE10引脚输出高电平 0x50006014[10] = 1 GPIOE->ODR |= (0x1 << 10);
}
//LED1熄灭
void led1_off()
{ //通过GPIOE_ODR寄存器,设置PE10引脚输出低电平 0x50006014[10] = 0 GPIOE->ODR &= (~(0x1) << 10);
} //LED2 ---> PF10
//RCC/GPIO章节初始化
void led2_rcc_gpio_init()
{ //0、使能GPIOE组控制器,通过RCC_MP_AHB4_ENSETR寄存器设置GPIOE组使能0x50000A28[5] = 1 RCC_MP_AHB4_ENSETR |= (0X1 << 5); //1、通过GPIOF_MODER寄存器,设置PF10引脚为输出模式 0x50007000[21:20] = 01 GPIOF->MODER &= (~(0x1 << 21)); //21位清0 GPIOF->MODER |= (0x1 << 20); //20位置1 //2、通过GPIOE_OTYPER寄存器,设置PF10引脚为推挽输出类型 0x50007004[10] = 0 GPIOF->OTYPER &= (~(0x1 << 10)); //3、通过GPIOE_OSPEEDR寄存器,设置PF10引脚为低速输出 0x50007008[21:20] = 00 GPIOF->OSPEEDR &= (~(0x3 << 20)); //4、通过GPIOE_PUPDR寄存器,设置PF10引脚禁止上下拉电阻 0x5000700C[21:20] = 00 GPIOF->PUPDR &= (~(0x3 << 20));
} //LED2点亮
void led2_on()
{ //通过GPIOF_ODR寄存器,设置PF10引脚输出高电平 0x50007014[10] = 1 GPIOF->ODR |= (0x1 << 10);
}
//LED2熄灭
void led2_off()
{ //通过GPIOF_ODR寄存器,设置PF10引脚输出低电平 0x50007014[10] = 0 GPIOF->ODR &= (~(0x1) << 10);
} //LED3 ---> PE8
//RCC/GPIO章节初始化
void led3_rcc_gpio_init()
{ //0、使能GPIOE组控制器,通过RCC_MP_AHB4_ENSETR寄存器设置GPIOE组使能0x50000A28[4] = 1 RCC_MP_AHB4_ENSETR |= (0X1 << 4); //1、通过GPIOE_MODER寄存器,设置PE10引脚为输出模式 0x50006000[17:16] = 01 GPIOE->MODER &= (~(0x1 << 17)); //17位清0 GPIOE->MODER |= (0x1 << 16); //16位置1 //2、通过GPIOE_OTYPER寄存器,设置PE10引脚为推挽输出类型 0x50006004[8] = 0 GPIOE->OTYPER &= (~(0x1 << 8)); //3、通过GPIOE_OSPEEDR寄存器,设置PE10引脚为低速输出 0x50006008[17:16] = 00 GPIOE->OSPEEDR &= (~(0x3 << 16)); //4、通过GPIOE_PUPDR寄存器,设置PE10引脚禁止上下拉电阻 0x5000600C[17:16] = 00 GPIOE->PUPDR &= (~(0x3 << 16));
} //LED1点亮
void led3_on()
{ //通过GPIOE_ODR寄存器,设置PE10引脚输出高电平 0x50006014[8] = 1 GPIOE->ODR |= (0x1 << 8);
}
//LED1熄灭
void led3_off()
{ //通过GPIOE_ODR寄存器,设置PE10引脚输出低电平 0x50006014[8] = 0 GPIOE->ODR &= (~(0x1) << 8);
} main.c
#include "led.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{int i,j;for(i = 0; i < ms;i++)for (j = 0; j < 1800; j++);
}int main()
{led1_rcc_gpio_init(); // LED灯初始化led2_rcc_gpio_init(); // LED灯初始化led3_rcc_gpio_init(); // LED灯初始化while(1){led1_on();delay_ms(500);led1_off();delay_ms(500);led2_on();delay_ms(500);led2_off();delay_ms(500);led3_on();delay_ms(500);led3_off();delay_ms(500);}return 0;
}3 循环实现
led.h
#ifndef __LED_H__
#define __LED_H__ #define RCC_MP_AHB4_ENSETR (*(volatile unsigned int*)0x50000A28) //结构体封装
typedef struct{ volatile unsigned int MODER; volatile unsigned int OTYPER; volatile unsigned int OSPEEDR; volatile unsigned int PUPDR; volatile unsigned int IDR; volatile unsigned int ODR;
}gpio_t; typedef enum{ LED_OFF=0, LED_ON,
}LED_C; typedef enum{ LED1=0, LED2, LED3
}LED; #define GPIOE ((gpio_t*)0x50006000)
#define GPIOF ((gpio_t*)0x50007000) void led_init(LED l);
void led_con(LED l,LED_C c);
#endif
led.c
#include "led.h"
//初始化灯
void led_init(LED led)
{ switch(led) { case LED1: RCC_MP_AHB4_ENSETR |= (0X1 << 4); GPIOE->MODER &= (~(0x1 << 21)); //21位清0 GPIOE->MODER |= (0x1 << 20); //20位置1 GPIOE->OTYPER &= (~(0x1 << 10)); GPIOE->OSPEEDR &= (~(0x3 << 20)); GPIOE->PUPDR &= (~(0x3 << 20)); break; case LED2: RCC_MP_AHB4_ENSETR |= (0X1 << 5); GPIOF->MODER &= (~(0x1 << 21)); //21位清0 GPIOF->MODER |= (0x1 << 20); //20位置1 GPIOF->OTYPER &= (~(0x1 << 10)); GPIOF->OSPEEDR &= (~(0x3 << 20)); GPIOF->PUPDR &= (~(0x3 << 20)); break; case LED3: RCC_MP_AHB4_ENSETR |= (0X1 << 4); GPIOE->MODER &= (~(0x1 << 17)); //17位清0 GPIOE->MODER |= (0x1 << 16); //16位置1 GPIOE->OTYPER &= (~(0x1 << 8)); GPIOE->OSPEEDR &= (~(0x3 << 16)); GPIOE->PUPDR &= (~(0x3 << 16)); break; }
}
//控制灯
void led_con(LED led,LED_C c)
{ switch(led) { case LED1: switch(c) { case LED_OFF: GPIOE->ODR &= (~(0X1 << 10)); break; case LED_ON: GPIOE->ODR |= (0X1 << 10); break; } break; case LED2: switch(c) { case LED_OFF: GPIOF->ODR &= (~(0X1 << 10)); break; case LED_ON: GPIOF->ODR |= (0X1 << 10); break; } break; case LED3: switch(c) { case LED_OFF: GPIOE->ODR &= (~(0X1 << 8)); break; case LED_ON: GPIOE->ODR |= (0X1 << 8); break; } break; }
}
main.c
#include "led.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{int i,j;for(i = 0; i < ms;i++)for (j = 0; j < 1800; j++);
}int main()
{led_init(LED1);led_init(LED2);led_init(LED3);while(1){led_con(LED1,LED_ON);delay_ms(200);led_con(LED1,LED_OFF);delay_ms(200);led_con(LED2,LED_ON);delay_ms(200);led_con(LED2,LED_OFF);delay_ms(200);led_con(LED3,LED_ON);delay_ms(200);led_con(LED3,LED_OFF);delay_ms(200);}return 0;
} 4 封装函数实现【重要】【常用】
初始化函数函数===>函数参数、函数实现
led.h
#ifndef __LED_H__
#define __LED_H__//LED1 ---> PE10
//LED2 ---> PF10
//LED3 ---> PE8//结构体封装
typedef struct{volatile unsigned int MODER; //0x00volatile unsigned int OTYPER; //0x04volatile unsigned int OSPEEDR; //0x08volatile unsigned int PUPDR; //0x0cvolatile unsigned int IDR; //0x10volatile unsigned int ODR; //0x14
}gpio_t;//GPIOE组基地址 0x50006000
#define GPIOE ((gpio_t*)0x50006000)//GPIOF组基地址 0x50007000
#define GPIOF ((gpio_t*)0x50007000)#define RCC_MP_AHB4ENSETR (*(volatile unsigned int*)0x50000A28)//引脚编号封装
#define GPIO_PIN_0 0
#define GPIO_PIN_1 1
#define GPIO_PIN_2 2
#define GPIO_PIN_3 3
#define GPIO_PIN_4 4
#define GPIO_PIN_5 5
#define GPIO_PIN_6 6
#define GPIO_PIN_7 7
#define GPIO_PIN_8 8
#define GPIO_PIN_9 9
#define GPIO_PIN_10 10
#define GPIO_PIN_11 11
#define GPIO_PIN_12 12
#define GPIO_PIN_13 13
#define GPIO_PIN_14 14
#define GPIO_PIN_15 15//模式寄存器封装
typedef enum{INPUT, //输入模式OUTPUT, //输出模式ALT, //复用功能模式ANALOG, //模拟功能模式
}gpio_moder_t;//输出类型寄存器封装
typedef enum{PP, //推挽OD, //开漏
}gpio_otyper_t;//输出速率寄存器封装
typedef enum{LOW, //低速MED, //中速HIGH, //高速VERY_HIGH, //快速
}gpio_ospeedr_t;//是否需要上下拉电阻进行封装
typedef enum{NO_PU_PD, //禁止上下拉电阻PU, //上拉PD, //下拉
}gpio_pupdr_t;//封装初始化结构体
typedef struct{gpio_moder_t moder; //模式相关寄存器gpio_otyper_t otyper; //输出类型寄存器gpio_ospeedr_t ospeedr; //输出速率寄存器gpio_pupdr_t pupdr; //是否需要上下拉电阻寄存器
}gpio_init_t;//输出高低电平
typedef enum{GPIO_RESET_T, //低电平GPIO_SET_T, //高电平
}gpio_status_t;//函数功能:gpio相关初始化工作
//参数1:GPIO组编号
//参数2:GPIO引脚编号
//参数3:初始化相关内容
//返回值:无
void hal_gpio_init(gpio_t * gpiox,unsigned int pin,gpio_init_t* init);//函数功能:gpio写相关操作
//参数1:GPIO组编号
//参数2:GPIO引脚编号
//参数3:写值 写1高电平 写0低电平
//返回值:无
void hal_gpio_write(gpio_t* gpiox,unsigned int pin,gpio_status_t status);#endifled.c
#include "led.h"
void hal_gpio_init(gpio_t * gpiox,unsigned int pin,gpio_init_t* init)
{//设置模式gpiox->MODER &= (~(0x3 << (pin * 2)));gpiox->MODER |= (init->moder << (pin * 2));//设置输出类型gpiox->OTYPER &= (~(0x1 << pin));gpiox->OTYPER |= (init->otyper << pin);//设置输出速率gpiox->OSPEEDR &= (~(0x3 << pin));gpiox->OSPEEDR |= (init->ospeedr << pin);//设置是否需要上下拉电阻gpiox->PUPDR &= (~(0x3 << pin));gpiox->PUPDR |= (init->pupdr << pin);
}void hal_gpio_write(gpio_t* gpiox,unsigned int pin,gpio_status_t status)
{if(status == GPIO_RESET_T){//熄灭gpiox->ODR &= (~(0X1 << pin));}else{//点亮gpiox->ODR |= (0x1 << pin);}
}main.c
#include "led.h"extern void printf(const char *fmt, ...);void delay_ms(int ms){int i,j;for(i = 0; i < ms;i++)for (j = 0; j < 1800; j++);}void led_init(){//GPIOE组 / GPIOF组使能RCC_MP_AHB4ENSETR |= (0x3 << 4);//结构体初始化gpio_init_t init = {OUTPUT,PP,LOW,NO_PU_PD};hal_gpio_init(GPIOE,GPIO_PIN_10,&init);hal_gpio_init(GPIOF,GPIO_PIN_10,&init);hal_gpio_init(GPIOE,GPIO_PIN_8,&init);}int main(){led_init(); //LED灯初始化while(1){hal_gpio_write(GPIOE,GPIO_PIN_10,GPIO_SET_T);delay_ms(200);hal_gpio_write(GPIOE,GPIO_PIN_10,GPIO_RESET_T);delay_ms(200);hal_gpio_write(GPIOF,GPIO_PIN_10,GPIO_SET_T);delay_ms(200);hal_gpio_write(GPIOF,GPIO_PIN_10,GPIO_RESET_T);delay_ms(200);hal_gpio_write(GPIOE,GPIO_PIN_8,GPIO_SET_T);delay_ms(200);hal_gpio_write(GPIOE,GPIO_PIN_8,GPIO_RESET_T);delay_ms(200);}return 0;}相关文章:
)
C语言 cortex-A7核 点LED灯 (附 汇编实现、使用C语言 循环实现、使用C语言 封装函数实现【重要、常用】)
1 汇编实现 text global _start start: ************** LED1点灯 ---> PE10 **************/ ************** RCC章节初始化 **************/ CC_INIT:1.使能GPIOE组控制器,通过RCC_MP_AHB4ENSETR寄存器设置GPIOE组使能0x50000A28[4] 1ldr r0,0x50000A28 准…...
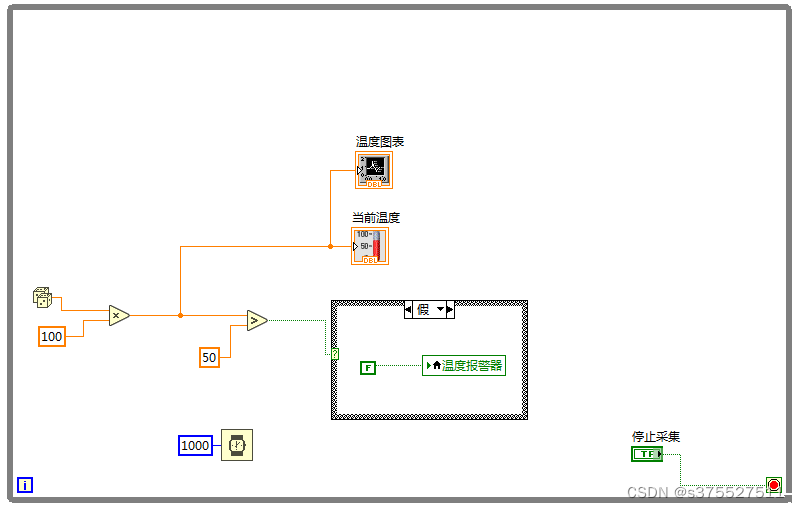
LABVIEW 实战案例1--温度报警系统
图1 温度报警系统前面板 图2 温度报警系统后面板...

【力扣】292. Nim 游戏
题目描述 你和你的朋友,两个人一起玩 Nim 游戏: 桌子上有一堆石头。你们轮流进行自己的回合, 你作为先手 。每一回合,轮到的人拿掉 1 - 3 块石头。拿掉最后一块石头的人就是获胜者。 假设你们每一步都是最优解。请编写一个函数…...
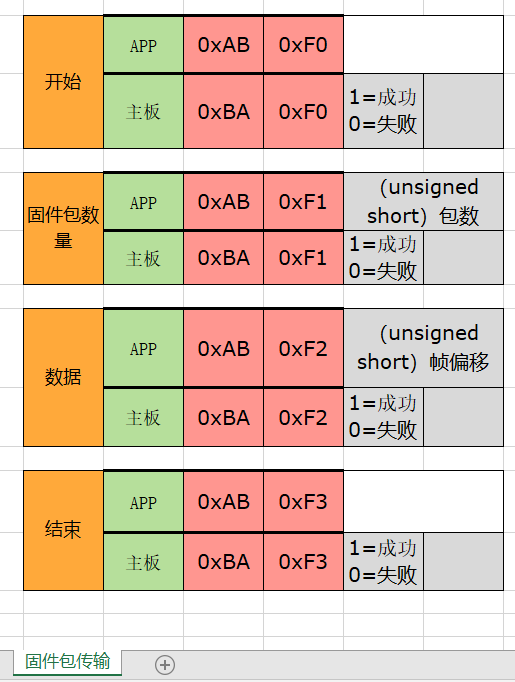
IAP固件升级分几步?(Qt上位机、)
前言 这周一直想做一个IAP固件升级的上位机,然后把升级流程全都搞懂 有纰漏请指出,转载请说明。 学习交流请发邮件 1280253714qq.com IAP原理 IAP的原理我就不多赘述了,这里贴上几位大佬的文章 STM32CubeIDE IAP原理讲解,及U…...
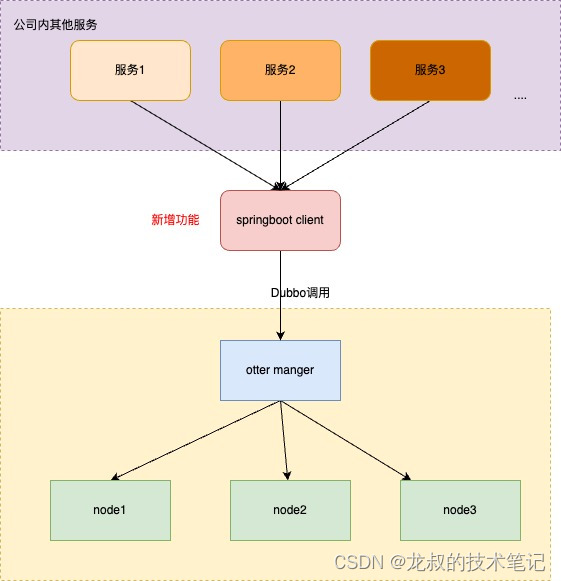
Otter改造 增加springboot模块和HTTP调用功能
环境搭建 & 打包 环境搭建: 进入 $otter_home/lib 目录执行:bash install.sh 打包: 进入$otter_home目录执行:mvn clean install -Dmaven.test.skip -Denvrelease发布包位置:$otter_home/target 项目背景 阿里…...
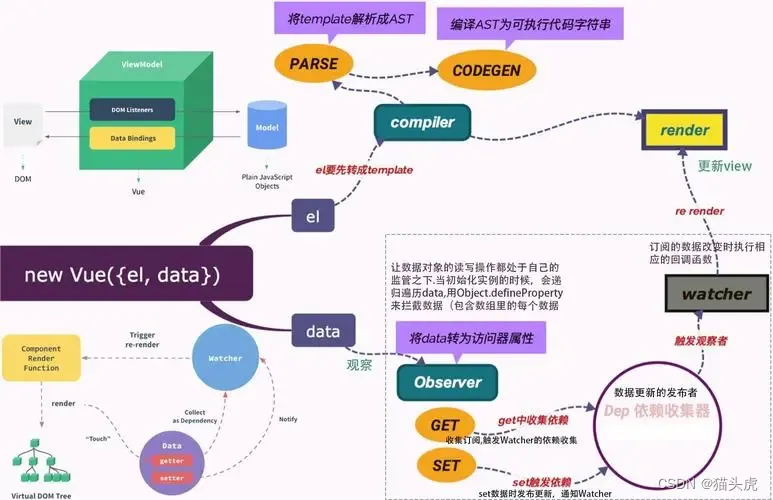
Vue.js vs React:哪一个更适合你的项目?
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
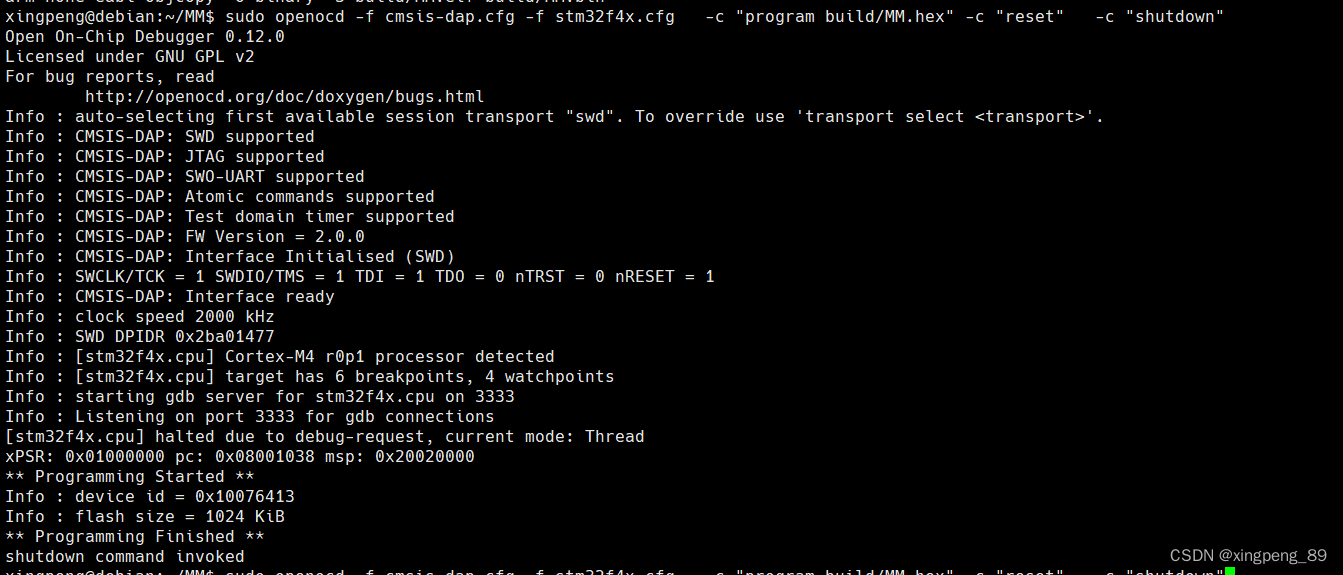
Debian环境下搭建STM32开发环境
1. 安装交叉编译工具,解压gcc-arm-none-eabi-10.3-2021.10-x86_64-linux.tar.bz2,并且把交叉编译环境添加到path路径。 2.安装下载工具驱动和下载工具 # 安装下载工具openocd sudo apt -y install openocd 3.下载测试 sudo openocd -f cmsis-dap.cfg -…...
如何防止商业秘密泄露(洞察眼MIT系统商业机密防泄密解决方案)
在当今的商业环境中,保护公司的商业秘密是至关重要的。商业秘密可能包括独特的业务流程、客户列表、研发成果、市场策略等,这些都是公司的核心竞争力。一旦这些信息被泄露,可能会对公司的生存和发展产生重大影响。本文将探讨如何通过使用洞察…...

题目 1062: 二级C语言-公约公倍
输入两个正整数m和n,求其最大公约数和最小公倍数。样例输入 2 3样例输出 1 6 这题一知半解的, 最小公倍数两数の积/最大公约数; 最大公约数通过迭代法求得(见其下), 作为a,b两数有一个属为有一个为0为无效数据时 《-----a%b等…...
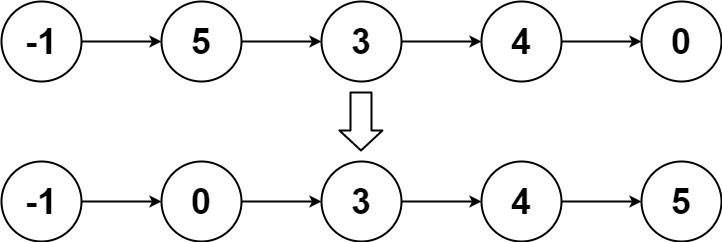
【Leetcode】148.排序链表
一、题目 1、题目描述 给你链表的头结点 head ,请将其按 升序 排列并返回 排序后的链表 。 示例1: 输入:head = [4,2,1,3] 输出:[1,2,3,4]示例2: 输入:head = [-1,5,3,4,0] 输出:[-1,0,3,4,5]示例3: 输入:head = [] 输出:[]提示: 链表中节点的数目在范围 [0, 5 …...

用《斗破苍穹》的视角打开C#多线程开发1(斗帝之路)
Thread.Start() 是的,我就是乌坦城那个斗之气三段的落魄少爷,在我捡到那个色眯眯的老爷爷后,斗气终于开始增长了。在各种软磨硬泡下,我终于学会了我人生中的第一个黄阶斗技——吸掌。 using System.Threading;namespace Framewo…...

图像处理与计算机视觉--第三章-颜色与纹理分析-6问
图像处理与计算机视觉--第三章-颜色与纹理分析-6问 1.哪些因素决定物体颜色的感知? 对于物体颜色的感知,主要取决于以下三个因素: 1.照射到物体表面光波长的分布 2.物体表面如何反射照射光 3.传感器或者视觉细胞的敏感性 除了上述的三个因素之外,…...
vue重修002
文章目录 版权声明一 指令修饰符1. 什么是指令修饰符?2. 按键修饰符3. v-model修饰符4. 事件修饰符 二 v-bind对样式控制的增强-操作class1. 语法:2. 对象语法3. 数组语法4. 代码练习 三 京东秒杀-tab栏切换导航高亮四 v-bind对有样式控制的增强-操作sty…...

[PowerQuery] PowerAutoMate 刷新PowerBI 数据
通过PowerBI Automate 进行PowerBI 数据刷新之前,需要有Power Automate 授权或者Power Automate 试用账户,可以通过如下的地址进行申请注册。 https://flow.microsoft.com/zh-cn/ 完成Power Automate 登录之后,选中计划的云端流后创建,图为创建计划的云端流的操作步骤。 …...

C语言中各种接口标准
1.POSIX(Portable Operating System Interface,可移植操作系统接口):是一个定义了操作系统接口标准的家族。它旨在提供一致的API(Application Programming Interface,应用程序编程接口)和环境&a…...

vscode常用插件
koroFileHeader: 设置详情, 文件头自动注释 code runner: 支持多语言编译运行 git lens: git 提交可视化查看工具 Markdown配套软件: Markdown All in One: Markdown文档工具集成Markdown PDF: Markdown文档导出为PDFMarkdown Preview Enhanced: 分屏查…...
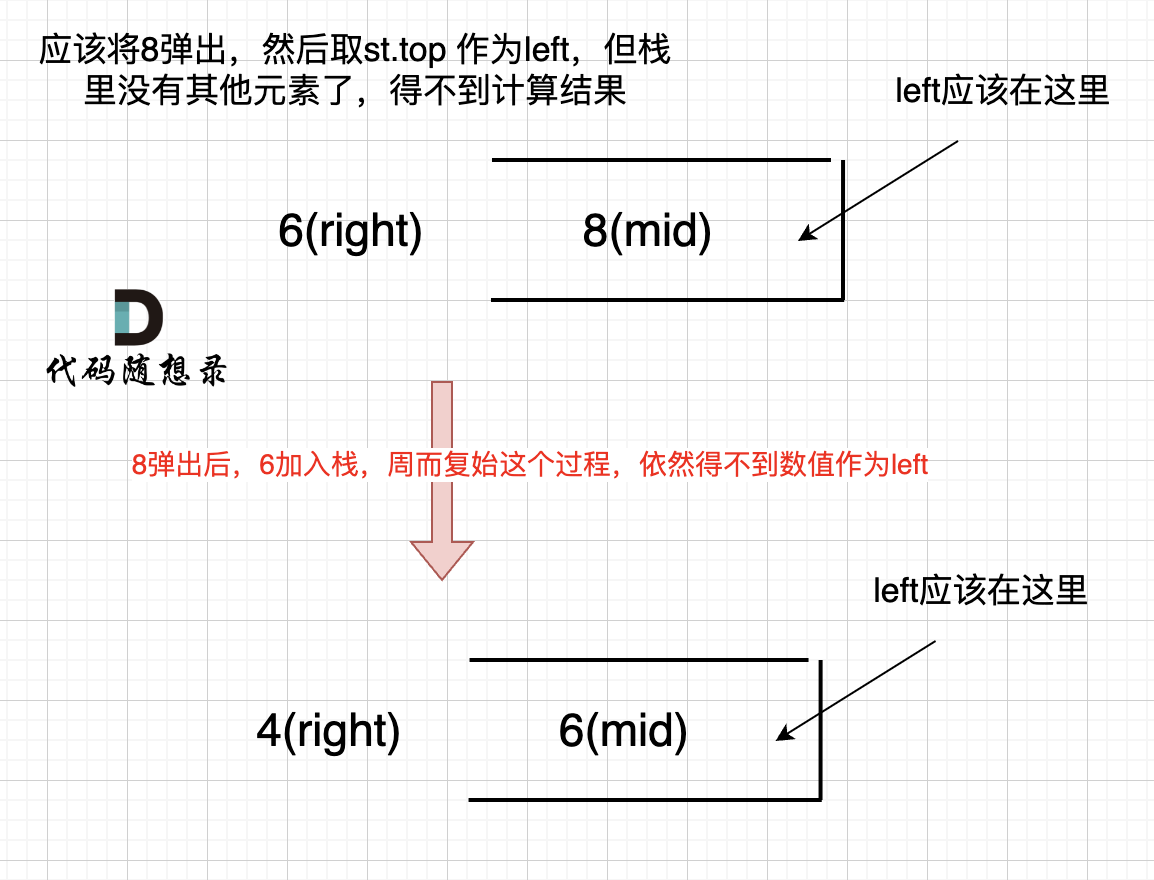
代码随想录算法训练营day60|84.柱状图中最大的矩形 |完结撒花~
84.柱状图中最大的矩形 力扣题目链接 给定 n 个非负整数,用来表示柱状图中各个柱子的高度。每个柱子彼此相邻,且宽度为 1 。 求在该柱状图中,能够勾勒出来的矩形的最大面积。 1 < heights.length <10^5 0 < heights[i] < 10^…...
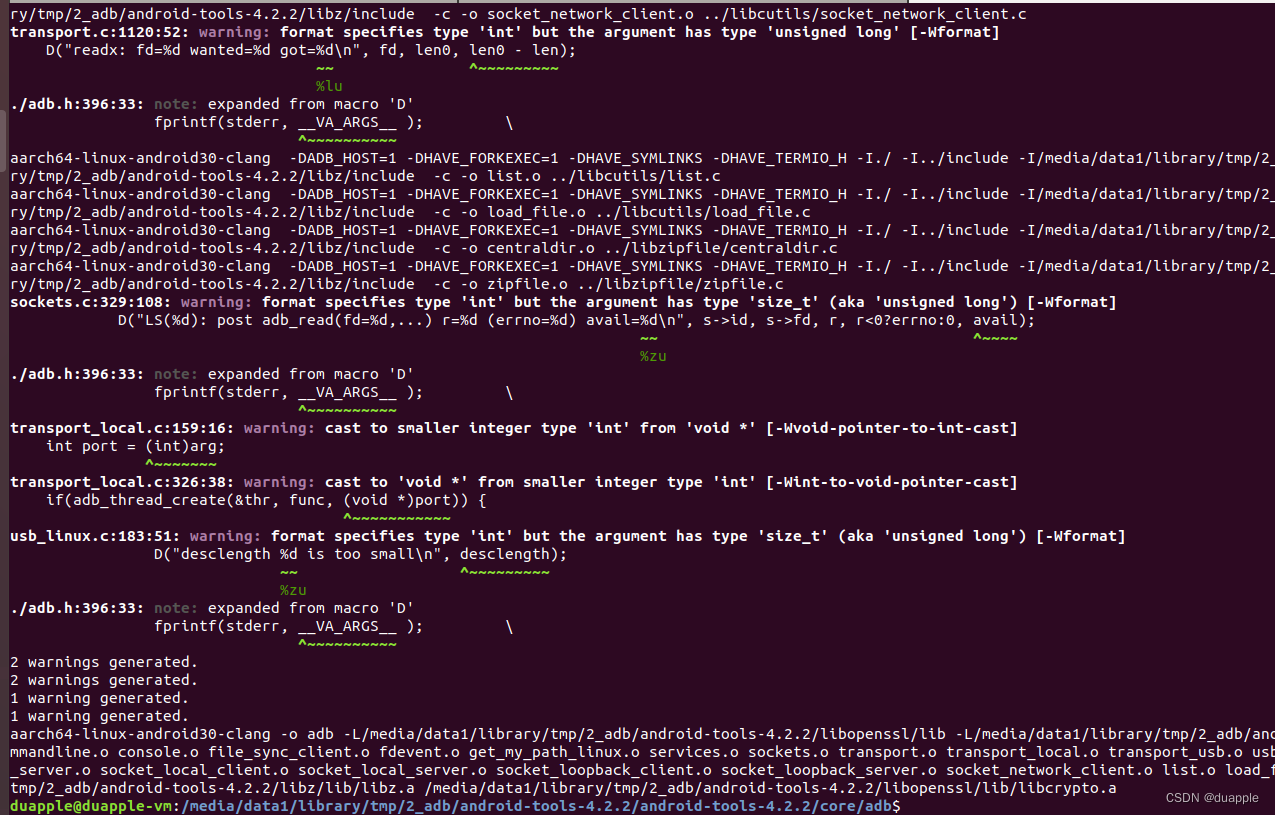
在 android 上使用 adb client
adb tool 分为 adb 和 adbd。 adb 用作 host 使用,包含了client和server,adbd 则作为 device 端,在 android 源码目录下,共用一套源码。但 android 源码下的 adb,不支持把 adb 编译为 android 平台的 adb client。因此…...
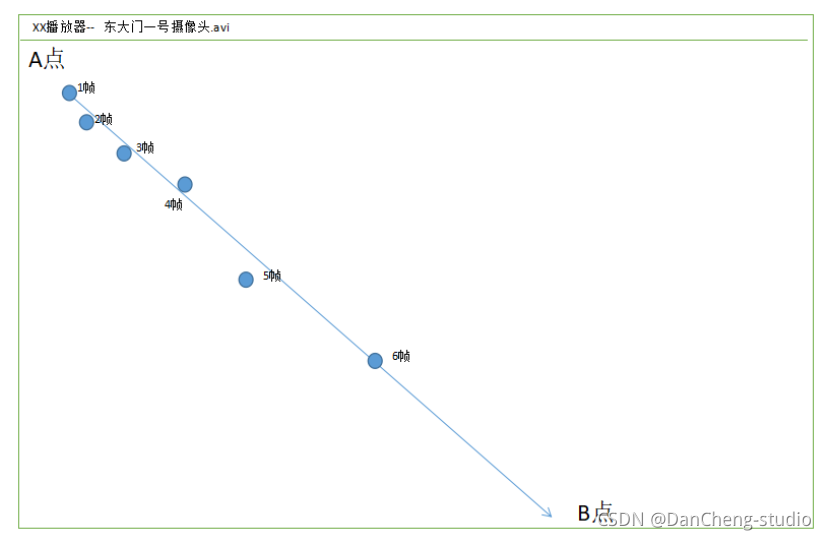
竞赛选题 基于深度学习的视频多目标跟踪实现
文章目录 1 前言2 先上成果3 多目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 基于深度学习的视频多目标跟踪实现 …...
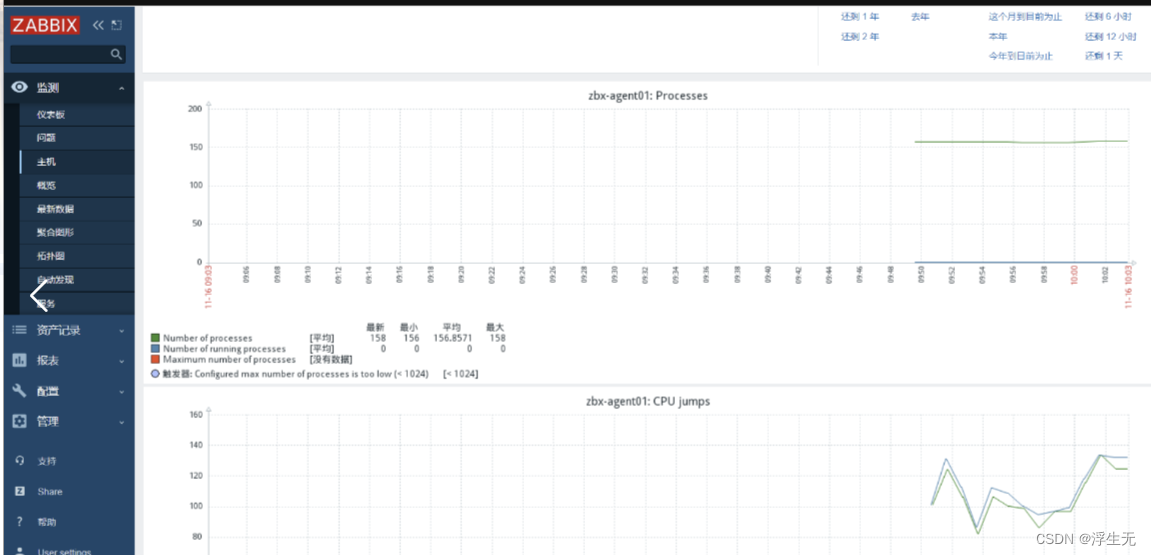
分布式应用之监控平台zabbix的认识与搭建
一、监控系统的相关知识 1.1 监控系统运用的原因 当我们需要实时关注与其相关的各项指标是否正常,往往存在着很多的服务器、网络设备等硬件资源,如果我们想要能够更加方便的、集中的监控他们,zabix可以实现集中监控管理的应用程序 监控的…...

工作5年的PHP程序员,转智能体开发半年,薪资翻了2倍
文章目录前言一、PHP程序员的中年危机:不是你不行,是时代变了二、为什么智能体开发是PHP程序员的最优转型方向?1. 门槛最低,上手最快2. 竞争最小,薪资最高3. 前景最好,发展空间最大三、那个转智能体半年薪资…...

告别开发板:用QEMU+STM32虚拟环境,零成本开启你的ARM Cortex-M汇编学习之旅
零成本构建ARM Cortex-M开发环境:QEMU模拟STM32实战指南 为什么选择虚拟化环境学习嵌入式开发? 记得第一次接触嵌入式开发时,面对琳琅满目的开发板和动辄上千元的调试器,作为学生的我一度望而却步。直到发现了QEMU这个开源神器&…...

NVIDIA Profile Inspector终极指南:200+隐藏参数解锁显卡性能新高度
NVIDIA Profile Inspector终极指南:200隐藏参数解锁显卡性能新高度 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector NVIDIA Profile Inspector是一款功能强大的显卡驱动参数调校工具…...

XT2055 双灯显示微型线性电池充电管理芯片
■ 产品概述 XT2055 是一款完善的单节锂电池恒流/恒压线性充电管理芯片。较薄的尺寸和较小的封装使它适用于便携式产品的应用,XT2055 也适用于 USB 的供电电路。得益于内部的MOSFET 结构,在应用上不需要外部电阻和阻塞二极管。在高能量运行和外围温度较高…...

ARMv8 A64指令集SIMD与浮点运算优化指南
1. A64指令集SIMD与浮点运算架构解析在ARMv8架构中,A64指令集的SIMD(单指令多数据流)和浮点运算单元构成了高性能计算的核心引擎。这套指令集的设计体现了现代处理器架构中数据级并行(DLP)的精髓——通过单条指令同时处…...

ChatSVA:多智能体框架革新硬件验证中的SVA生成
1. ChatSVA:硬件验证领域的SVA生成革命在集成电路设计领域,功能验证已成为制约开发效率的最大瓶颈。据统计,现代芯片开发周期中超过50%的时间消耗在功能验证环节,而SystemVerilog断言(SVA)作为形式化验证和…...

MCP协议实践:构建AI助手与IDE间的通信中继
1. 项目概述:IDE与AI助手间的“通信中继”最近在折腾AI编程助手时,发现一个挺有意思的痛点:像Cursor、Claude Desktop这类IDE插件或独立应用,它们内置的AI助手能力很强,但很多时候我们希望能让它们访问到IDE之外的一些…...

FPGA与CPU电源时序测试技术解析与实践
1. FPGA与CPU电源时序测试的核心挑战在现代电子系统中,FPGA、MCU和CPU等处理器件的电源设计堪称"心脏手术"。我曾参与过多个Xilinx UltraScale和Intel Stratix 10项目的电源验证,深刻体会到毫秒级的时序偏差就可能导致数千美元的芯片瞬间损毁。…...

从HEX到芯片:使用J-Flash实现高效固件烧录与生产级加密
1. 认识J-Flash:你的芯片烧录好帮手 第一次接触J-Flash时,我正为一个量产项目发愁——需要给500片GD32F103烧录固件。手动用IDE一个个烧?效率太低;找代工厂?成本太高。直到同事推荐了J-Flash,我才发现原来烧…...

ARMv8 A64指令集内存访问优化与LDRH/LDRSB指令详解
1. A64指令集与内存访问基础在ARMv8架构中,A64指令集作为64位执行状态的核心指令系统,其内存访问指令的设计直接影响处理器性能。与32位的A32指令集相比,A64在寄存器数量、地址空间和指令编码等方面都有显著改进。1.1 ARMv8内存访问特点ARM架…...