Carla自动驾驶模拟器安装和使用
Carla自动驾驶模拟器安装和使用
1 安装
ubuntu20.04安装carla0.9.11版本
步骤1:打开下面链接,点击第一个[Ubuntu] CARLA_0.9.11.tar.gz
carla-0.9.11源码下载

步骤2:下载完解压到/opt目录下
我的话是先在下载目录上提取解压,然后将文件复制到/opt目录下

步骤3:给整个文件夹赋权限
sudo chmod -R 777 carla-0.9.11/

2 Carla测试
2.1 安装环境
pip install pygame numpy future networkx scikit-learn transform3d
sudo apt-get install -y libomp5
sudo apt-get install jstest-gtk
嫌弃pip install下载速度慢的,在pip install xxx 后面加-i https://pypi.tuna.tsinghua.edu.cn/simple
2.2 配置环境
这部分建议大家要搞清楚文件的地方,carla-0.9.11文件位置的不同要做相应修改。
(1)首先打开~/.bashrc文件:sudo gedit ~/.bashrc
添加:
export PYTHONPATH=$PYTHONPATH:/opt/carla-0.9.11/PythonAPI/carla/dist/carla-0.9.11-py3.7-linux-x86_64.egg
export PYTHONPATH=$PYTHONPATH:/opt/carla-0.9.11/PythonAPI/carla/dist/carla-0.9.11-py3.7-linux-x86_64.egg:/opt/carla-0.9.11/PythonAPI/carla/agents
一定要注意carla-0.9.11-py3.7-linux-x86_64.egg文件的位置,这个找错位置source可能没用。
(2)source一下
source ~/.bashrc
(3)简单测试
python -c 'import carla; print("i am very cool")'
如果测试成功,是不会找不到carla包的
(4)运行carla
./CarlaUE4.sh
我的电脑配置是4060,所以运行起来感觉不是那么卡,
卡的可以使用./CarlaUE4.sh -prefernvidia -quality-level=Low -benchmark -fps=15,属实是降低了画质,提升了速度
2.3 Carla模拟器快捷键
有必要事先知道Carla模拟器一些快捷键指令,可以在下面测试的时候边测边用
Welcome to CARLA manual control.Use ARROWS or WASD keys for control.W : throttleS : brakeA/D : steer left/rightQ : toggle reverseSpace : hand-brakeP : toggle autopilotM : toggle manual transmission,/. : gear up/downCTRL + W : toggle constant velocity mode at 60 km/hL : toggle next light typeSHIFT + L : toggle high beamZ/X : toggle right/left blinkerI : toggle interior lightTAB : change sensor position` or N : next sensor[1-9] : change to sensor [1-9]G : toggle radar visualizationC : change weather (Shift+C reverse)Backspace : change vehicleV : Select next map layer (Shift+V reverse)B : Load current selected map layer (Shift+B to unload)R : toggle recording images to diskCTRL + R : toggle recording of simulation (replacing any previous)CTRL + P : start replaying last recorded simulationCTRL + + : increments the start time of the replay by 1 second (+SHIFT = 10 seconds)CTRL + - : decrements the start time of the replay by 1 second (+SHIFT = 10 seconds)F1 : toggle HUDH/? : toggle helpESC : quit W : 油门S : 刹车A/D : 转向 A左/D右Q : 倒车Space : 手刹P : 切换自动驾驶M : 切换手动变速,/. : 换档 up/downCTRL + W : 在60km/h时启用定速巡航L : 切换下一种灯光SHIFT + L : 切换远光灯Z/X : 切换右/左闪光灯I : 切换车内灯TAB : 更改传感器位置` or N : 下一个传感器[1-9] : 更改为传感器 [1-9]G : radar可视化C : 改变天气 (Shift+C 返回)Backspace : 更换一台车V : 选择下一个图层(Shift+V reverse)B : 加载当前选中的图层 (Shift+B 退出加载/卸载)R : 记录采集到的图片文件到磁盘CTRL + R : 切换模拟记录(替换以前的)CTRL + P : 开始回放上次录制的模拟视频CTRL + + : 将回放的开始时间增加 1 秒(+SHIFT = 10s)CTRL + - : 将回放的开始时间减少 1 秒(+SHIFT = 10s)F1 : 切换HUD(Head-up-Display抬头显示器)H/? : 打开“帮助”ESC : 退出2.4 测试py脚本
python PythonAPI/examples/spawn_npc.py -n 30:30个汽车(?29个行人)
python PythonAPI/examples/manual_control.py:手动控制,上面的快捷键可以在此脚本多测试测试
python PythonAPI/examples/automatic_control.py:自动驾驶
python PythonAPI/examples/dynamic_weather.py -s 5:天气变化加速了五倍
相关文章:
Carla自动驾驶模拟器安装和使用
Carla自动驾驶模拟器安装和使用 1 安装 ubuntu20.04安装carla0.9.11版本 步骤1:打开下面链接,点击第一个[Ubuntu] CARLA_0.9.11.tar.gz carla-0.9.11源码下载 步骤2:下载完解压到/opt目录下 我的话是先在下载目录上提取解压,然…...

【每日一题】1539. 第 k 个缺失的正整数
1539. 第 k 个缺失的正整数 - 力扣(LeetCode) 给你一个 严格升序排列 的正整数数组 arr 和一个整数 k 。 请你找到这个数组里第 k 个缺失的正整数。 示例 1: 输入:arr [2,3,4,7,11], k 5 输出:9 解释:缺失…...

AI-Chat,一款集全网ai功能的应用(附下载链接)
AI-Chat是一款综合性的聊天机器人,集成了多种先进的模型和功能。它采用了GPT4.0、联网版GPT和清华模型等多种模型,使得其具备更强大的语言处理能力。同时,AI-Chat还融合了AI绘画模型,例如Stable Diffusion绘画、文生图、图生图、艺…...

3、靶场——Pinkys-Place v3(3)
文章目录 一、获取flag41.1 关于SUID提权1.2 通过端口转发获取setuid文件1.3 运行pinksecd文件1.4 利用nm对文件进行分析1.5 构建payload1.6 Fire 二、获取flag52.1 生成ssh公钥2.2 免密登录ssh2.3 以pinksecmanagement的身份进行信息收集2.4 测试程序/usr/local/bin/PSMCCLI2.…...
什么是 AirServer?Mac专用投屏工具AirServer 7 .27 for Mac中文破解版百度网盘下载
AirServer 7 .27 for Mac中文免费激活版是一款Mac专用投屏工具,能够通过本地网络将音频、照片、视频以及支持AirPlay功能的第三方App,从 iOS 设备无线传送到 Mac 电脑的屏幕上,把Mac变成一个AirPlay终端的实用工具。 目前最新的AirServer 7.2…...

MapStruct介绍以及VO、DTO、PO、DO的区别
文章目录 一.基本概念1.1VO**(Value Object)值对象**1.2DTO**(Data Transfer Object)数据传输对象**1.3 PO**(Persistant Object)持久对象**等同于Entity,这俩概念是一致的 或DO1.4 **BO&#x…...

记一次hyperf框架封装swoole自定义进程
背景 公司准备引入swoole和rabbitmq来处理公司业务。因此,我引入hyperf框架,想用swoole的多进程来实现。 自定义启动服务封装 <?php /*** 进程启动服务【manager】*/ declare(strict_types1);namespace App\Command;use Swoole; use Swoole\Proce…...

多输入多输出 | MATLAB实现GA-BP遗传算法优化BP神经网络多输入多输出
多输入多输出 | MATLAB实现GA-BP遗传算法优化BP神经网络多输入多输出 目录 多输入多输出 | MATLAB实现GA-BP遗传算法优化BP神经网络多输入多输出预测效果基本介绍程序设计往期精彩参考资料 预测效果 基本介绍 多输入多输出 | MATLAB实现GA-BP遗传算法优化BP神经网络多输入多输出…...

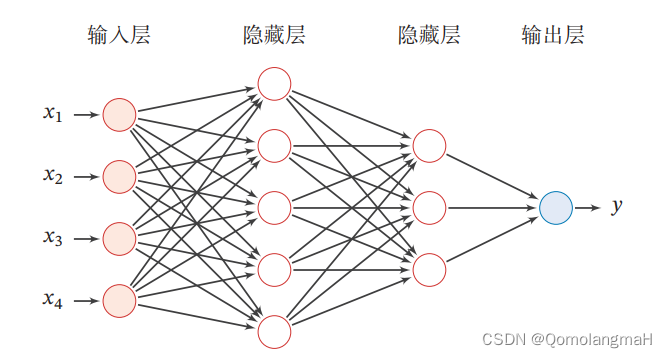
李宏毅机器学习笔记-transformer
transformer是什么呢?是一个seq2seq的model。具体应用如上图所示,输入和输出的序列长度不固定,由model自己决定。 语音翻译指的是,直接输入一段语音信号,例如英文,输出的直接是翻译之后的中文。 seq2seq如…...

基于Java的酒店管理系统
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战 主要内容:毕业设计(Javaweb项目|小程序等)、简历模板、学习资料、面试题库、技术咨询 文末联系获取 项目介绍…...

Go语言的单元测试与基准测试详解
文章目录 单元测试基准测试 单元测试 以一个加法函数为例,对其进行单元测试。 首先编写add.go文件: //add.go package mainfunc add(a, b int) int {return a b }其次编写add_test.go文件,在go语言中,测试文件均已_test结尾&a…...
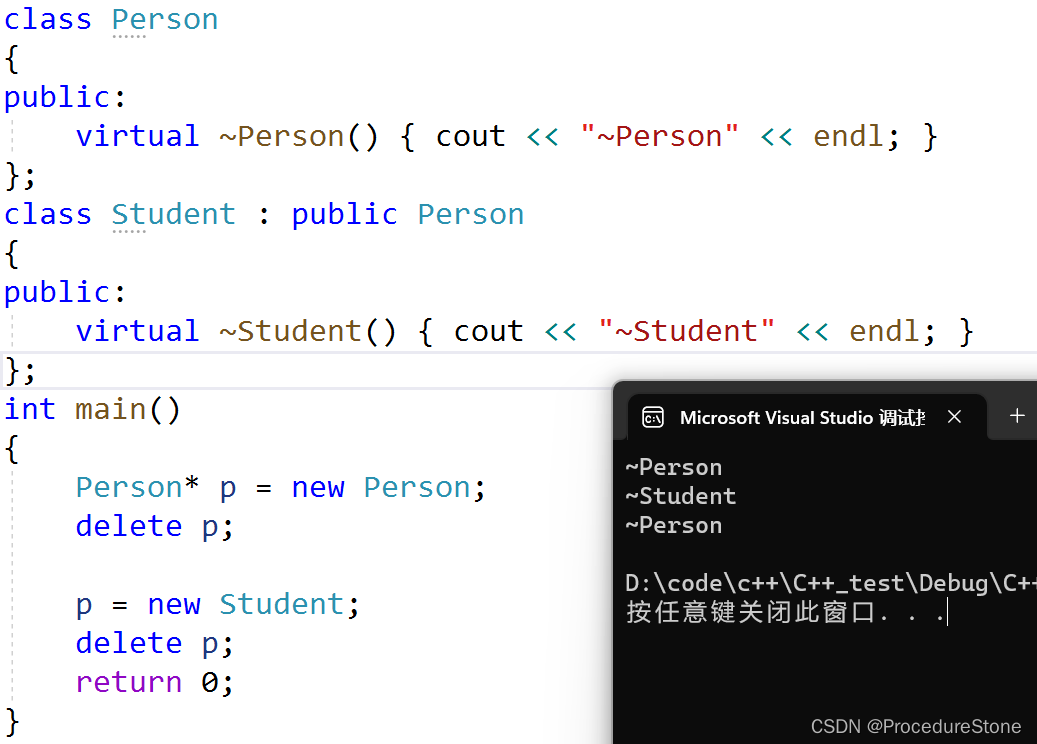
【多态】为什么析构函数的名称统一处理为destructor?
析构函数的名称统一处理为destructor的目的是为了解决析构函数的重写。 而这又引出了一个问题:为什么要进行析构函数的重写? 是为了下面这种情况: class Person { public:~Person() { cout << "~Person" << endl; } }…...

6.4 Case Studies - A Simple Logging Archive Class
下面这段内容介绍了一个示例,目的是帮助澄清"归档概念(Archive Concept)"的用法,以便用户可以实现自己的归档类。simple_log_archive.hpp 实现了一个简单但实用的归档类,用于将任何可序列化类型以可读的格式…...
【深度学习实验】前馈神经网络(九):整合训练、评估、预测过程(Runner)
目录 一、实验介绍 二、实验环境 1. 配置虚拟环境 2. 库版本介绍 三、实验内容 0. 导入必要的工具包 1. __init__(初始化) 2. train(训练) 3. evaluate(评估) 4. predict(预测) 5. save_model 6. load_model 7. 代码整合 一、实验介绍 二、实验环境 本系列实验使用…...

002-第一代硬件系统架构确立及产品选型
第一代硬件系统架构确立及产品选型 文章目录 第一代硬件系统架构确立及产品选型项目介绍摘要硬件架构硬件结构选型及设计单片机选型上位机选型扯点别的 关键字: Qt、 Qml、 信号采集机、 数据处理、 上位机 项目介绍 欢迎来到我们的 QML & C 项目ÿ…...

Go基础语法:指针和make和new
8 指针、make、new 8.1 指针(pointer) Go 语言中没有指针操作,只需要记住两个符号即可: & 取内存地址* 根据地址取值 package mainimport "fmt"func main() {a : 18// 获取 a 的地址值并复制给 pp : &a// …...

039_小驰私房菜_Camera perfermance debug
全网最具价值的Android Camera开发学习系列资料~ 作者:8年Android Camera开发,从Camera app一直做到Hal和驱动~ 欢迎订阅,相信能扩展你的知识面,提升个人能力~ 一、抓取trace 1. adb shell "echo vendor.debug.trace.perf=1 >> /system/build.prop" 2. …...

Caché for Windows安装及配置
本文介绍在Windows上安装Cach的操作步骤。本文假设用户熟悉Windows目录结构、实用程序和命令。本文包含如下主要部分: 1)Cach安装...

代码随想录算法训练营20期|第四十六天|动态规划part08|● 139.单词拆分 ● 关于多重背包,你该了解这些! ● 背包问题总结篇!
139.单词拆分 感觉这个板块要重新刷,完全没有印象 class Solution {public boolean wordBreak(String s, List<String> wordDict) {Set<String> set new HashSet<>(wordDict);boolean[] dp new boolean[s.length() 1];dp[0] true;for (int i…...
系统安装(一)CentOS 7 本地安装
CentOS与Ubuntu并称为Linux最著名的两个发行版,但由于笔者主要从事深度学习图像算法工作,Ubuntu作为谷歌和多数依赖库的亲儿子占据着最高生态位。但最近接手的一个项目里,甲方指定需要在CentOS7上运行项目代码,笔者被迫小小cos了一…...

如何通过Jellyfin Android TV客户端打造家庭影院级媒体体验?
如何通过Jellyfin Android TV客户端打造家庭影院级媒体体验? 【免费下载链接】jellyfin-androidtv Android TV Client for Jellyfin 项目地址: https://gitcode.com/gh_mirrors/je/jellyfin-androidtv 想要在智能电视上享受专业的媒体管理体验吗?…...
)
告别混乱信号!用CANdb++ Editor从零搭建汽车CAN网络DBC文件(保姆级图文教程)
告别混乱信号!用CANdb Editor从零搭建汽车CAN网络DBC文件(保姆级图文教程) 在汽车电子开发领域,CAN总线如同神经脉络般贯穿整车系统。我曾参与过一个新能源整车项目,由于早期缺乏规范的DBC文件,不同ECU厂商…...

JVM调优实战:让你的服务性能提升50%
一、背景 线上一个核心订单服务,QPS 3000左右,经常出现接口超时告警。监控显示: 平均RT: 180ms(要求<100ms)Full GC频率: 每天20次,每次STW 1.5sCPU使用率: 峰值85%服务规格: 8C16G,堆内存…...

Windows Cleaner终极指南:三步告别C盘爆红,让电脑运行如飞!
Windows Cleaner终极指南:三步告别C盘爆红,让电脑运行如飞! 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 还在为Windows系统…...

Emacs AI编程助手:ai-code-interface.el深度集成指南
1. 项目概述:一个为Emacs注入AI灵魂的代码接口如果你是一位Emacs的深度用户,同时又对AI辅助编程抱有极大的热情,那么你很可能已经厌倦了在浏览器、终端和编辑器之间反复横跳的割裂体验。tninja/ai-code-interface.el这个项目,正是…...

轻量级工作流引擎pro-workflow:Go语言实现与实战解析
1. 项目概述:一个为专业开发者量身打造的工作流引擎如果你是一名开发者,尤其是经常需要处理复杂业务逻辑、数据流转或自动化任务的后端或全栈工程师,那么你一定对“工作流”这个概念不陌生。从简单的审批流到复杂的微服务编排,工作…...

LLVM开发实战指南:从入门到精通编译器与程序分析
1. 项目概述:为什么你需要一份LLVM指南?如果你是一名C开发者,或者对编译器、程序分析、代码优化这些底层技术感兴趣,那么“LLVM”这个名字对你来说一定不陌生。它早已不是象牙塔里的学术玩具,而是驱动着从iOS、macOS到…...

5分钟快速上手:Windows虚拟显示器终极指南,轻松实现多屏扩展
5分钟快速上手:Windows虚拟显示器终极指南,轻松实现多屏扩展 【免费下载链接】parsec-vdd ✨ Perfect virtual display for game streaming 项目地址: https://gitcode.com/gh_mirrors/pa/parsec-vdd 还在为单显示器工作效率低下而烦恼吗…...

开源无人机任务控制系统:微服务架构与自主飞行开发实战
1. 项目概述:一个开源的无人机任务控制系统如果你和我一样,玩过一段时间无人机,从最初的“一键起飞”到后来想实现一些自动化的航线飞行,你可能会发现,市面上成熟的任务规划软件(比如DJI的Pilot 2或一些地面…...
)
如何用1条prompt触发真实针孔物理特性?揭秘焦距=0.8mm、景深无限、色散偏移的3层嵌套语法结构(附可运行JSON配置)
更多请点击: https://intelliparadigm.com 第一章:如何用1条prompt触发真实针孔物理特性?揭秘焦距0.8mm、景深无限、色散偏移的3层嵌套语法结构(附可运行JSON配置) 针孔成像并非抽象概念,而是可通过精确 p…...