【RTOS学习】单片机中的C语言
🐱作者:一只大喵咪1201
🐱专栏:《RTOS学习》
🔥格言:你只管努力,剩下的交给时间!

本喵默认各位小伙伴都会C语言,我们平时学习C语言都是在Windows环境下学习的,对于程序执行的底层逻辑了解的不是非常清楚,本喵在这里给大家介绍一下,C语言在单片机中是如何执行的。
单片机中的C语言
- 🍞CPU与外设
- 🥞Flash
- 🥞SRAM(内存)
- 栈
- 数据段
- 堆
- 🍞变量的初始化
- 🥞局部变量
- 🥞全局变量和静态变量
- 🍞函数
- 🍞指针变量
- 🍞结构体和联合体
- 🍞总结
🍞CPU与外设
我们知道,单片机也是有CPU的,它负责执行代码,运算数据,以及发出控制信号等功能,而与CPU直接相连的设备我们称之为外设(就是集成芯片)。
本喵以STM32F103ZET6为例来讲解,该芯片使用的是ARM架构,该架构采用的是哈弗结构。
- 哈弗结构:内存和外设统一编址。
ARM芯片属于精简指令集计算机(RISC:Reduced Instruction Set Computing),它所用的指令比较简单,有如下特点:
① 对内存只有读、写指令。
② 对于数据的运算是在CPU内部实现。
③ 使用RISC指令的CPU复杂度小一点,易于设计。
比如对于a=a+b这样的算式,需要经过下面4个步骤才可以实现:
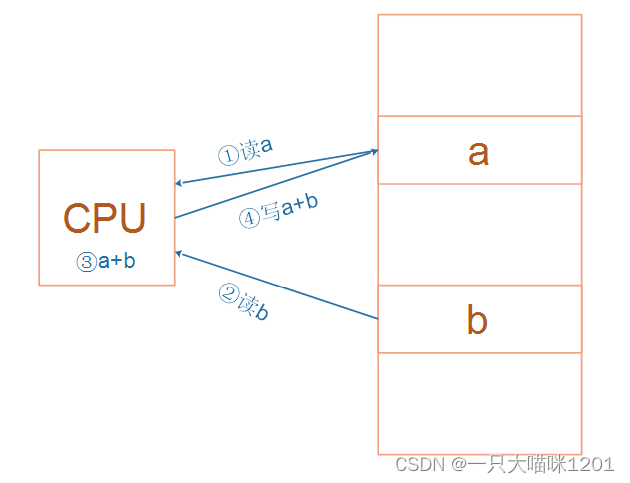
细看这几个步骤,有些疑问,a的值读出来后保存在CPU里面哪里?b的值读出来后保存在CPU里面哪里? a+b的结果又保存在哪里?
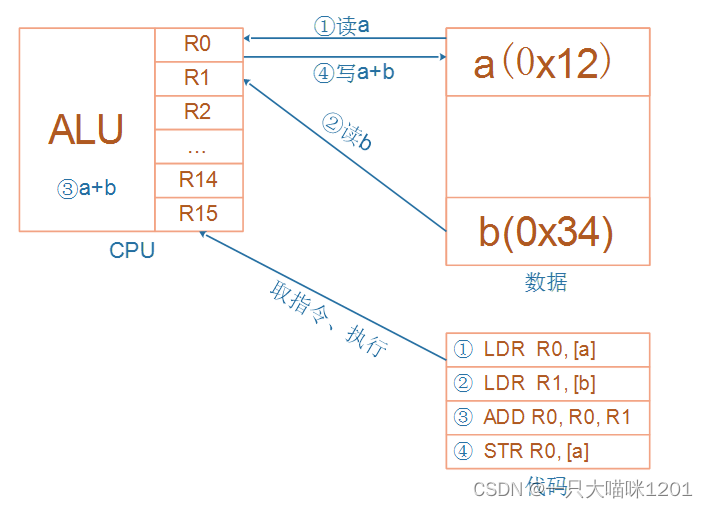
如上图所示,CPU也是有多个部分组成的,包括ALU逻辑运算单元,控制单元,以及多个寄存器等等。
假设变量a的地址是0x12,变量b的地址是0x34,第一步的汇编代码LDR R0, [a]的意思就是将0x12地址中的值读取到R0寄存器中,第二部读取b变量同理。
- LDR + 第一操作数 + 第二操作数:就是将第二操作数的值赋第一操作数。
当变量a和变量b都被读到了CPU的寄存器中后,执行第三步汇编代码ADDR R0, R0, R1,意思是将R0和R1中的值相加,然后将结果保存到R0中。
- ADD:相加的汇编指令,可以有三个操作数也可以有两个操作数,三个操作数则后两个操作数相加,得的结构均保存到第一个操作数。
最后就是将R0中的计算结果再写回到内存中,执行第四步汇编代码STR R0,[a],意思是将R0中的值写入到变量a的地址处0x12。
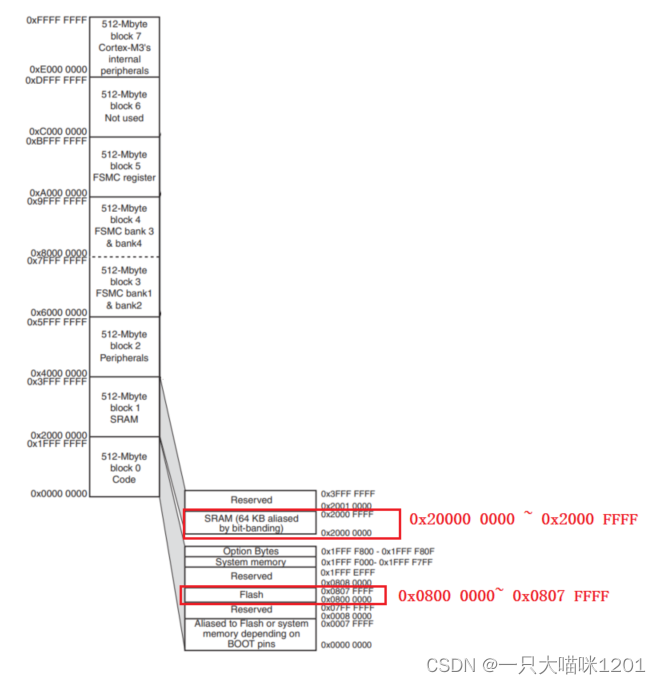
如上图所示,由于有32根地址线,所以CPU可访问的地址范围就是0x0000 0000 ~ 0xFFFF FFFF,就拿我们熟知的Flash和SRAM来说,它两和CPU直接相连,所以也可以看成是外设。
- Flash:用来存放用户烧录的程序,掉电数据不丢失(硬件特性)。
- SRAM:用来存放程序执行过程中的临时数据,掉电数据丢失。
Flash的地址范围是0x0800 0000 ~ 0x0807 FFFF,SRAM的地址范围是0x2000 0000 ~ 0x2000 FFFF,这是我们根据上面的图才知道的。
但是对于CPU而言,它并不知道哪里是FLASH哪里是SRAM,它只是被动的在执行代码。CPU在一上电以后就从0x0000 0000处开始执行代码(可以进行设置,以后再讲解),直到调用了我们C代码中必须有的main函数,然后进入我们自己的逻辑当中。
🥞Flash
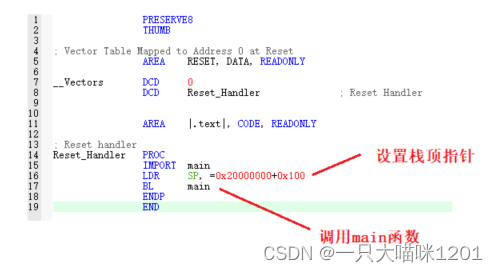
如上图启动文件所示,CPU会通过BL汇编语句来调用main函数,但是在这之前,还会执行LDR汇编语句来给栈顶指针SP赋值。
- BL:跳转指令,也就是让程序跳转到指定位置处执行,相当于函数调用。
我们知道,代码最终会被转换成机器码让CPU去执行,而存放这些机器码也需要空间,所以代码也是有地址的。
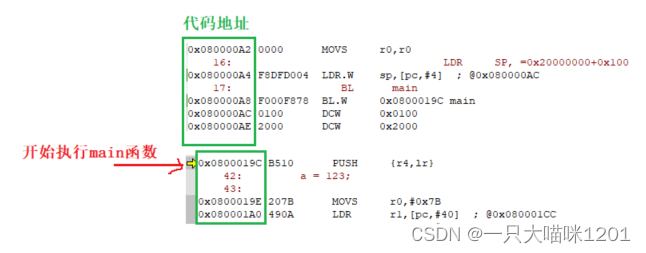
如上图所示,无论是调用main函数之前的汇编代码,还是main函数的代码,它们的地址都是0x0800 0xxx,距离FLASH的起始地址0x0800 0000不是很远,说明我们烧录到单片机中的代码就是存放在FLASH中的。
- 无论是
main中的代码,还是前面的汇编代码,只要是从FLASH起始处开始的,都属于我们程序员写的代码。- 芯片厂家在
FLASH起始地址之前,固化了一些代码,这个暂不作说明。
🥞SRAM(内存)
栈
当main执行起来以后,运算数据得到的临时结果或者中间数据就都会暂存到SRAM上,也就是我们平常所说的内存中。
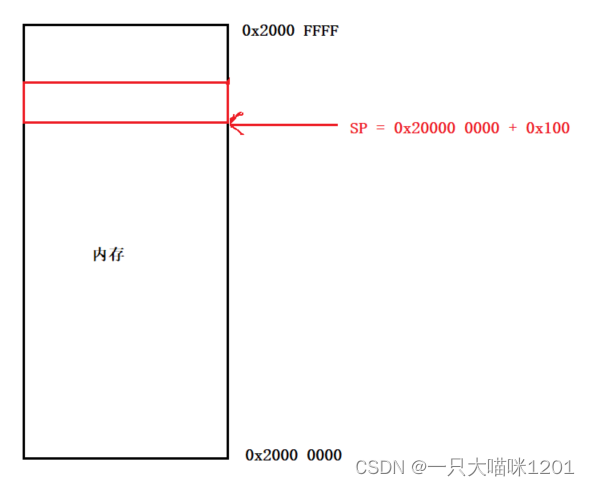
如上图所示,在使用BL调用main函数之前,还使用了LDR给栈顶指针SP赋了初值,红色箭头指向的位置就是栈顶指针指向的位置。
代码中的局部变量,函数栈帧等等数据,全部都存放在SP开始往下的位置,因为栈的开辟是从高地址向低地址。
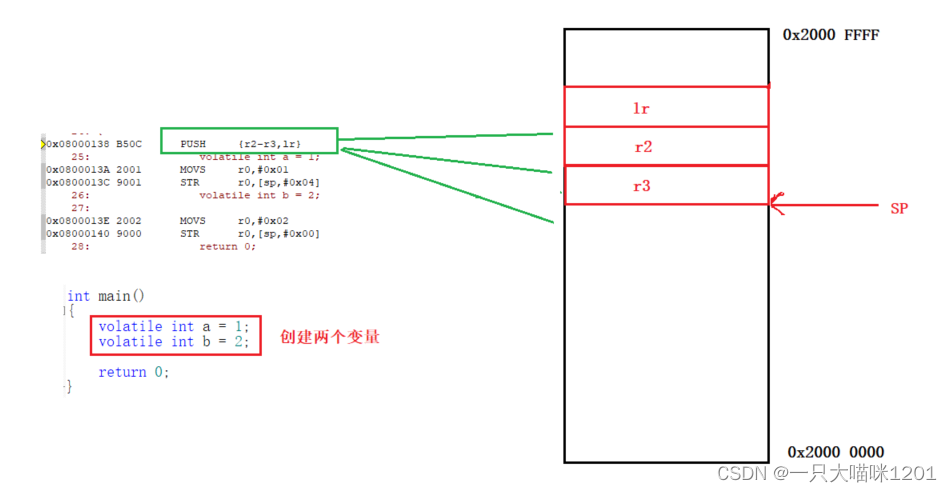
如上图所示,在main函数中创建两个变量a和b,加volatile的作用是防止编译器将这两个变量优化掉导致本喵无法演示现象。
main函数也是被调用的,所以在其内部创建的变量也属于局部变量,局部变量就统统存放在栈上。
汇编代码中,在创建变量a之前先执行了一句PUSH {r2-r3,lr}汇编语句,意思是将寄存器lr,寄存器r2和r3中的值压入栈中。
lr:寄存器存放的是函数的返回地址,其实就是CPU中的r15寄存器。PUSH:执行压栈操作,将数据压入到栈中后,栈顶指针向下移动。
此时向栈中压入了三个个数据,每个数据都是4字节的,所以SP向下移动了12个字节,这12个字节就可以看作当前main函数的栈帧大小。
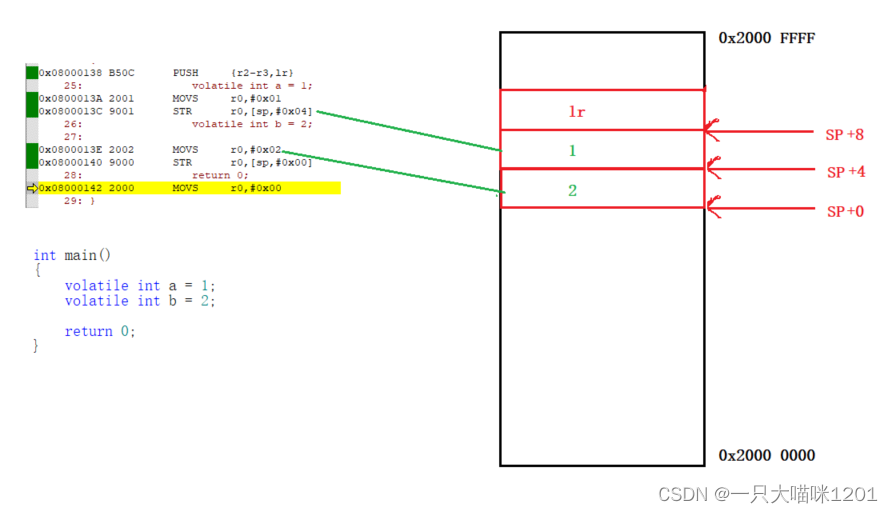
如上图,当执行到给变量a赋值1时,执行了汇编代码MOVS r0,#0x01,表示将数值1赋值给寄存器r0。然后再执行汇编代码STR r0,[sp,#0x04],表示将寄存器r0中的值,写入到sp + 0x04地址处。
- MOVS:将后一个操作数赋值给前一个操作数。
给变量b赋值2的时候,原理同上。所以此时在内存中就存在了1和2两个值,分别存在于sp+4和sp+0的位置处,后面用到变量a和b的时候,也是通过栈顶指针sp来找这两个值。
在这个过程中我们发现,寄存器r2和r3的的作用就是占坑,现在栈中给变量a和b占两个位置,等到STR赋值的时候将这两个位置覆盖即可。
那如果我创建100字节大小的数组呢?难道用100个寄存器来占坑吗?显然不可能,CPU一共也没那么多寄存器。
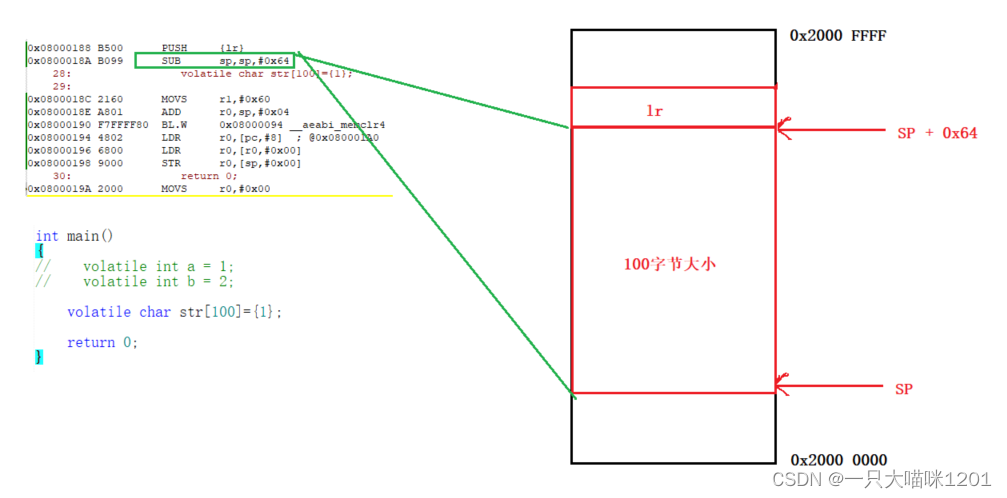
如上图所示,创建100字节大小的数组,先开辟100个字节大小的栈空间,执行汇编语句SUB sp,sp,#0x64,表示用当前的sp值减去0X64(100的16进制),将结果再赋值到sp中。
- SUB:用法和ADD相似,只是作用是后两个操作数做减法,得到的结果赋值给第一个操作数。
此时在SRAM(内存)上就存在一个100字节大小的栈用来存放这个str数组,此时它不使用占坑的方式了,而是直接改变SP的值来改变栈区的大小。
数据段
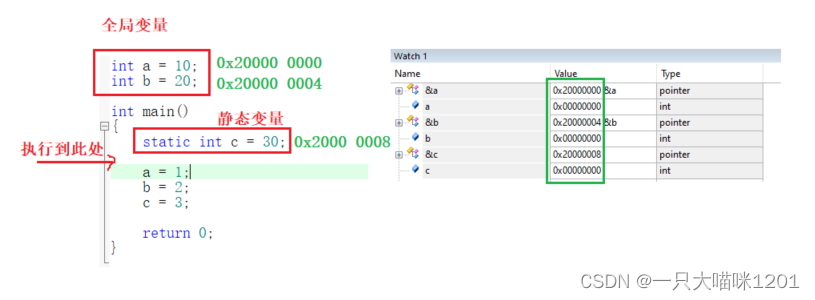
如上图所示,创建两个全局变量a和b,还有一个静态变量c,在调试窗口中可以看到,变量a的地址是0x20000 0000,变量b的地址是0x20000 0004,变量c的地址是0x2000 0008,这三个变量紧挨着。
- 在C语言学习中我们知道,全局变量和静态变量是存放在数据段的。
- 先忽略为什么它们的初始值都是0这个问题。
在最前面本喵放了一张内存地址映射图,其中SRAM的地址范围是0x2000 0000 ~ 0x20000 FFFF,也就是说内存的起始地址就是0x2000 0000,而变量a,b,c从起始位置开始存放,所以说这个位置就是数据段起始位置。
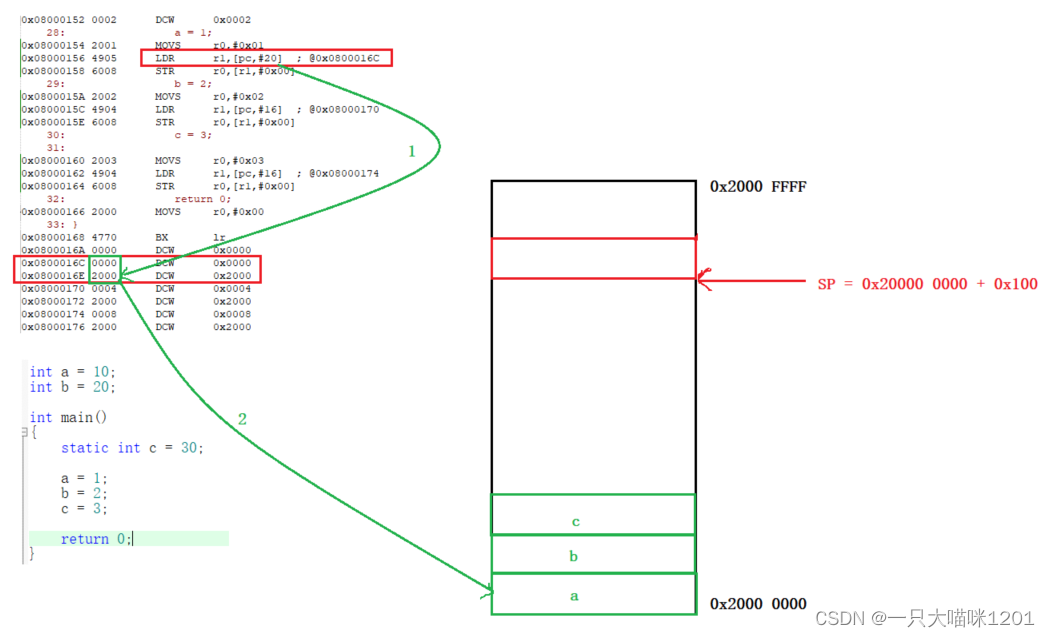
如上图所示,当给变量a赋值时,先执行MOVS r0,#0x01,将数值1赋值给寄存器r0,然后执行LDR r1,[pc,#20]语句,表示从PC + 20的地址处读取数据放入到寄存器r1中。
- PC:程序计数器,实际上就是CPU寄存器中的R15,它存放程序的地址,其值永远是当前语句的下一条语句的地址。
- CPU会根据PC值去执行对应的指令。
PC + 20的值是0x0800 0016C,这是一个Flash处的地址,而该地址处的值是0x0000,由于LDR一次取四个字节的数据,所以要连0x0800 0016E处的值0x2000也要读走,两个值按照大端存储模式复原(高地址存放高字节序),得到的值就是0x2000 0000。
所以此时寄存器r1中的值就是0x2000 0000,再执行STR r0,[r1,#0x00]汇编语句,将r0中的1写入到0x20000 0000处,也就是数据段变量a的地址处,此时就成功改变了它的值。
堆
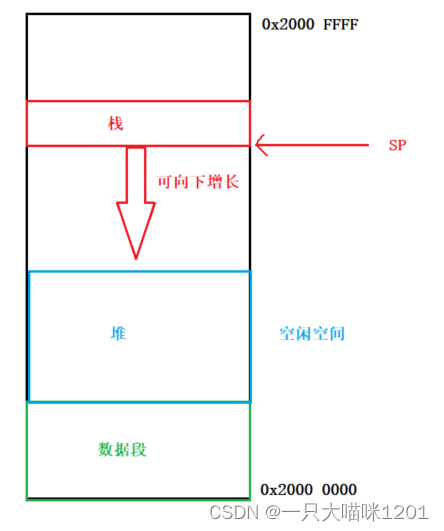
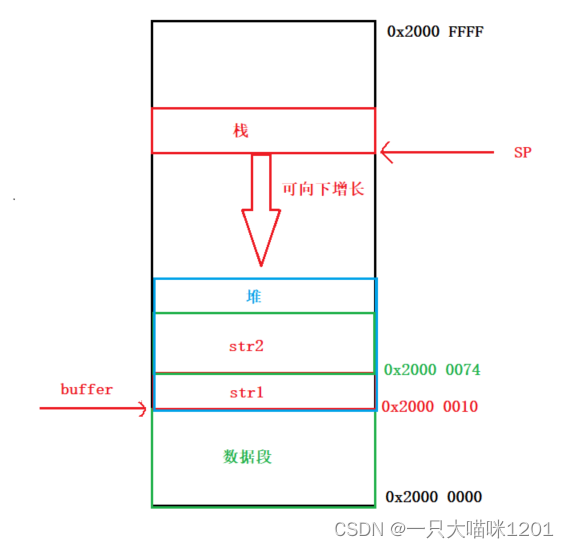
如上图,整个SRAM上,栈占用一部分空间,它的大小随着的SP的变化而变化,数据段占用一部分空间,但是还没有全部使用完毕,还有剩余的空闲空间,堆就建立在这部分空间上。
- 堆空间的大小并不会发生变化,它就是一块固定大小的空间,用户可以去申请使用,用完了还必须归还。
所以可以用一个大的全局数组来管理这块空间,因为全局数组存放在数据段,它的大小并不会随着SP的变化而变化,从而堆空间的大小也不会变化。
- 虽然叫做堆,但是这部分空间仍然属于数据段,只是提供了接操作这部分空间的接口。
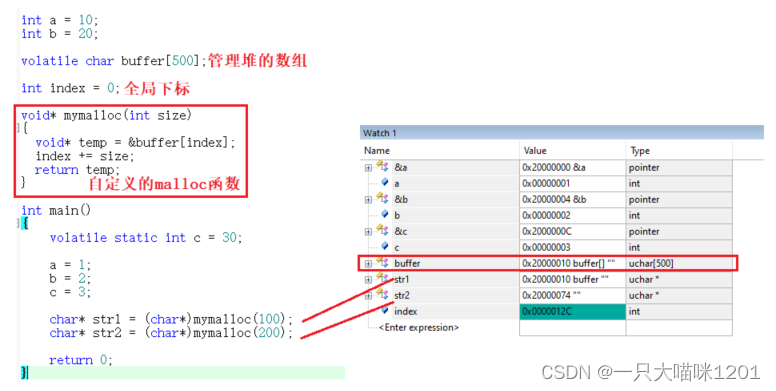
如上图所示,本喵定义了一个全局数组char buffer[500]来充当堆,还有一个全局的index用来记录堆的使用情况,又实现了一个mymalloc用来向堆区申请空间。
全局数组buffer的地址是0x2000 0010,排在a,b,c,index后面,第一次mymalloc以后,得到的地址是0x2000 0010,大小是100个字节,第二次mymalloc以后,得到的地址是0x2000 0074,地址相差0x64也就是100,说明这是在第一次申请的基础上再次申请的。index的值是0x12C也就是300,说明一共申请了300个字节的空间。
自定义的释放函数myfree本喵就不写了,各位小伙伴可以自行尝试。所以说,堆本质上就是就是一块空闲内存,可以使用malloc/free函数来管理它。
为什么Flash的起始地址就是0x0800 0000,SRAM的起始地址就是0x2000 0000?不能是别的吗?
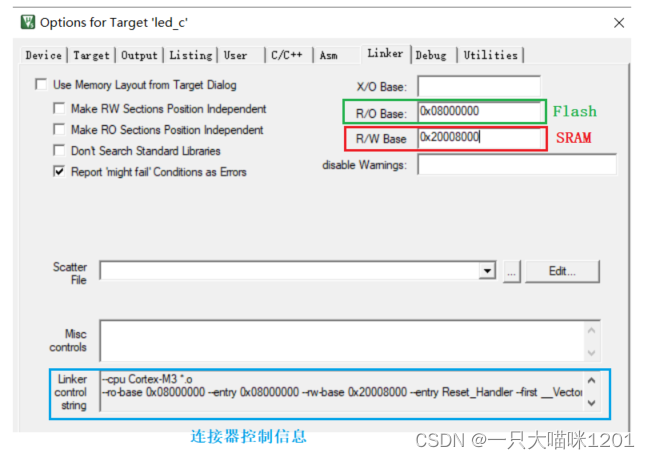
如上图所示,在MDK中,连接器选项中R/O Base是Flash基地址,用来设置Flash的起始地址,R/W Base是SRAM基地址,用来设置SRAM的起始地址。
下面蓝色框中的是连接器控制信息,里面的内容是我们程序员写的,目的是告诉连接器要做什么。
默认情况下,红色框中的SRAM起始地址是0x2000 0000,本喵将其该成了0x2000 8000,来看一下会发生什么?
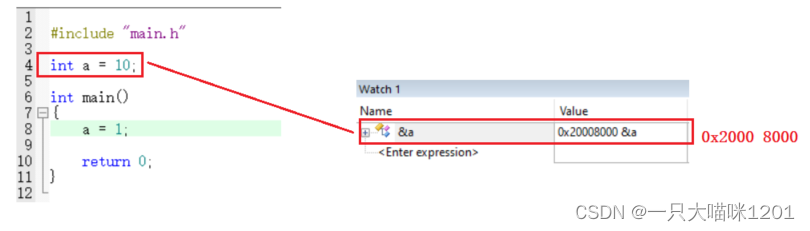
如上图所示,此时代码里只有一个全局变量a,它位于数据段的起始位置,也就是SRAM的起始位置,其地址是0x2000 8000,本喵成功的修改了SRAM的起始地址。
Flash的地址也是同理,也可以通过连接器R/O Base进行修改。
🍞变量的初始化
- 变量:能改变的量,它一定在内存上占据空间,
🥞局部变量
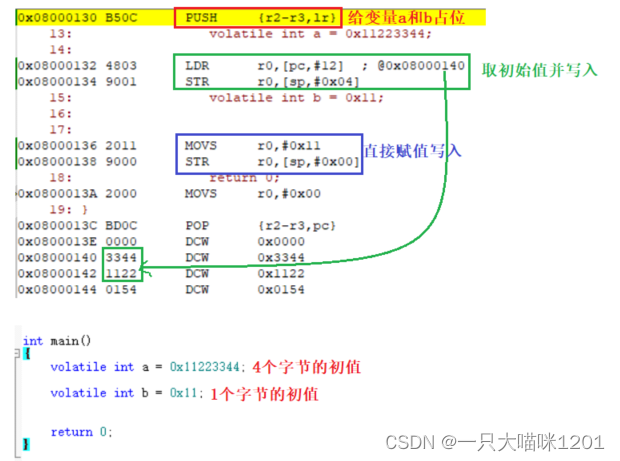
如上图所示,在main函数中创建了局部变量a并赋值0x11223344,创建了局部变量b并赋值0x11。在汇编代码中,首先移动SP,由于只有两个变量,所以压栈r2和r3来占位。
初始化变量a的时候,先执行LDR r0,[pc,#12]汇编语句,取地址为0x0800140的Flash中取值,读取了该地址及下个地址供四个字节数据0x11223344,赋值给寄存器r0。然后再执行STR r0,[sp,#0x04]汇编语句,将r0中的0x11223344赋值给变量a所在处。
初始化变量b的时候,先执行MOVS r0,#0x11汇编语句,直接将立即数#0x11赋值给寄存器r0,然后再执行STR r0,[sp,#0x00]汇编语句,将r0中的0x11赋值给变量b所在处。
- 两个局部变量的初始化过程并不一样,初始值为4字节的变量需要去
Flash中取初值,初始值为1字节的变量,直接就给赋值了。
指令也是有大小的,如0x08000132 4803 LDR r0,[pc,#12]中,0x08000132是代码所在的Flash地址,4803是代码汇编之后的机器码,大小是2字节(CPU执行的是机器码,汇编语句是为了方便我们看的,剩下的就是汇编语句)。
对于初始值为0x#11的初始化,两个字节的指令足够容纳一个字节的初值,所以直接就赋值初始化了。
对于初始值为0x11223344的初始化,两个字节的指令无法容纳四个字节的初值,所以必需取Flash中取初值到寄存器中,然后再进行赋值。
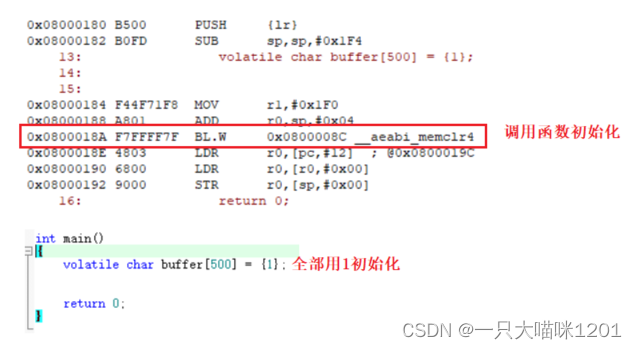
如上图,创建一个char buffer[500]数组全部用1初始化,使用BL.W指令跳转到__aeabi_memclr4处进行初始化,相当于调用了一个函数来初始化这个数组,这个函数是由编译器生成的,也是一堆汇编语句,这里本喵暂不做介绍。
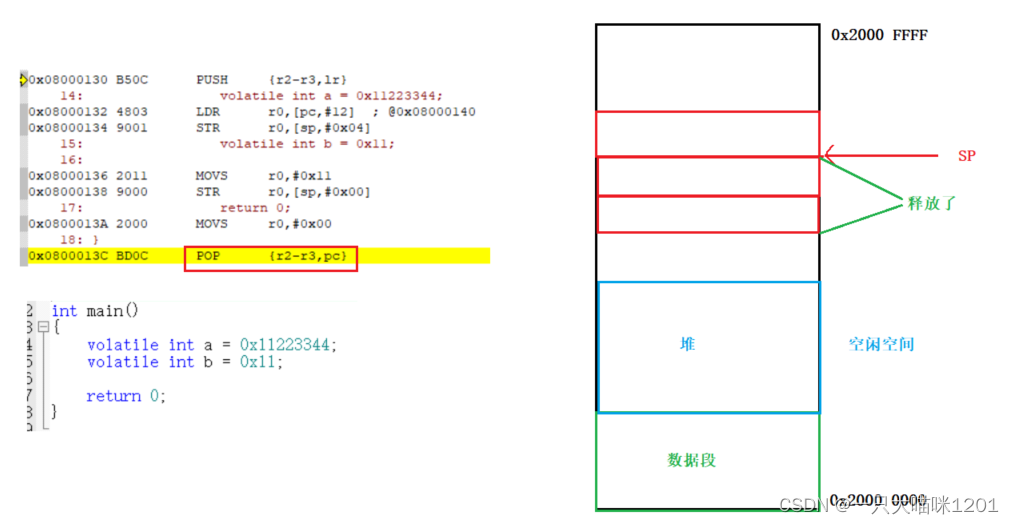
如上图,当main函数执行完,执行了return 0以后,会执行POP {r2-r3,pc}汇编语句,将前面压栈时向下生长的空间回收,也就是SP向上移动。
- POP:出栈操作,将栈中的数据弹出,并且
SP栈顶指针向上移动。
此时原本存放变量a和b的空间就位于栈外面了,原本的值弹出给了r0和r1,PC拿到函数的返回地址lr。
虽然a和b的内存空间还存在,但是已经不再被维护了,当有新的局部变量需要栈的时候,SP会重新向下移动,并且使用新的值覆盖掉这部分空间。
🥞全局变量和静态变量
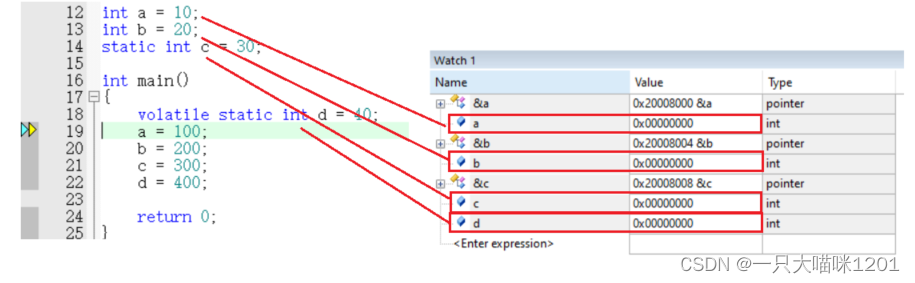
如上图所示,定义两个全局变量a和b,初始值分别为10和20,定义一个全局静态变量,初始值为30,定义一个局部静态变量,初始值为40,当程序执行到main中时,通过调试窗口看到它们的值都是0,并没有被初始化。
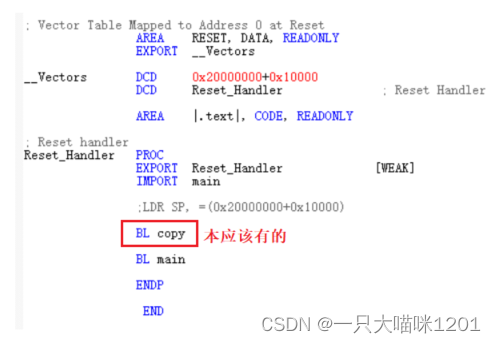
如上图,在启动文件中使用BL跳转到main函数之前,需要先跳转到copy函数,将全局变量的初始值全部复制到对应数据段的地址。但是这里本喵并没有实现copy函数,所以全局变量没有被初始化。
- 全局变量的初始值是存放在
Flash中的,注意是只存放初始值,不存放变量名,因为CPU执行的是机器码,机器码中并没有变量名这么一说。
copy函数的实现本喵在以后会详细介绍。
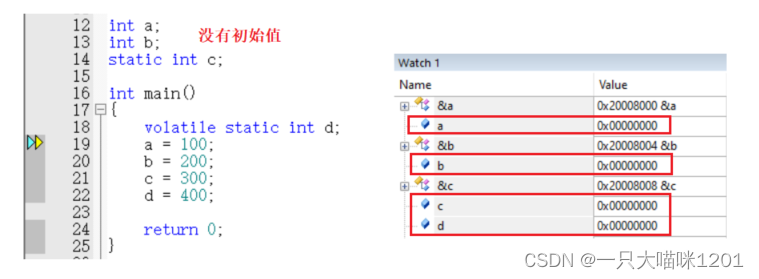
如上图,仍然是这四个变量,但是在定义都是时候都没有给初始值,没有进行初始化,但是在调试窗口看到它们的值仍然是0。
- 对于没有初始值的数据段变量,在编译的时候,编译器会用0将这些变量初始化,也就是将对应地址写0。
相当于会调用一个memset函数将这部分变量全部初始化为0。这些变量处于数据段的未初始化数据段,而前面有初始值的处于已初始化数据段。
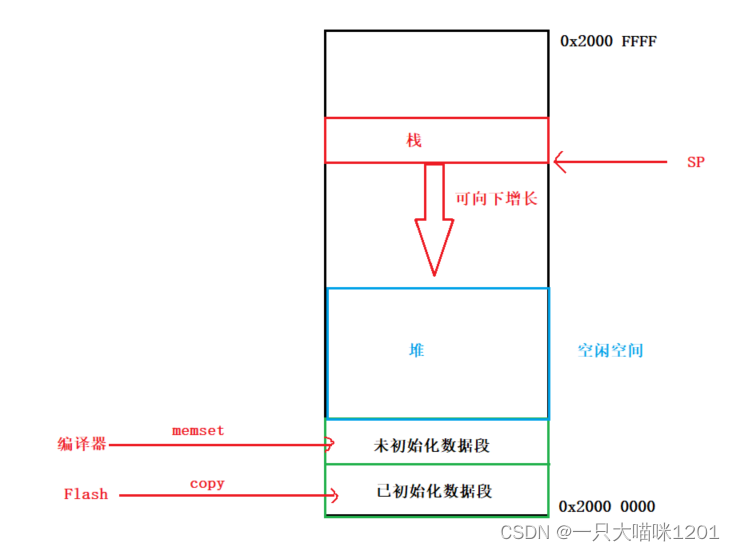
如上图所示,便是整个数据段的内存示意图。
在STM32F103中,代码是在FLASH中运行的,并不会加载到内存中,而且代码和数据段的初始值是混合存放在Flash中的。
🍞函数
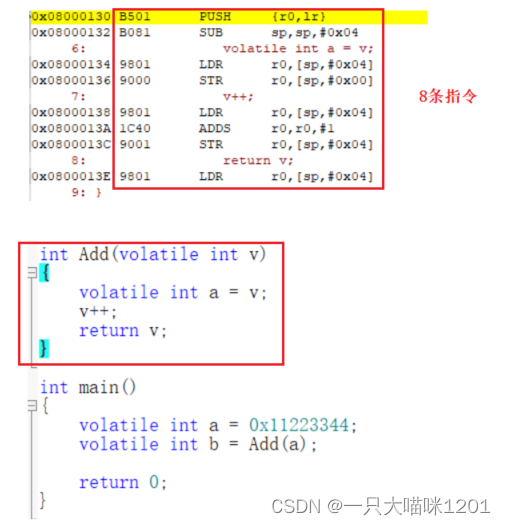
如上图所示,Add函数其实就是8条汇编指令,调用函数就是让CPU的PC寄存器等于8条指令的首地址,也就是函数地址。
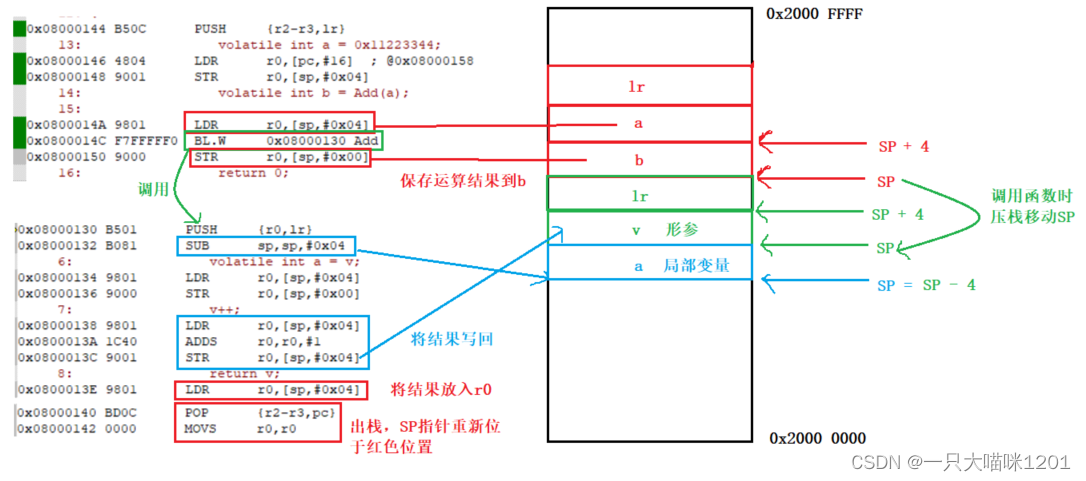
如上图,main函数开辟一次栈,SP位于上图红色位置,栈里有变量a和b以及main函数的返回地址lr。
在调用Add函数的时候,会再压一次栈,SP位于上图绿色位置,这次压入了Add函数的返回地址lr,以及形参v,再执行SUB语句为局部变量a开辟空间,SP位于上图蓝色位置。
- 函数传参通过寄存器
r0实现,在PUSH的时候,r0中已经有了实参,然后将实参压入调用函数的栈中成为形参。
然后执行LDR和STR将形参的值拿到局部变量a中,再进行加一操作,操作完毕后将结果再度写入到形参v的位置,当函数返回时,执行LDR将运算结果存入r0寄存器中,然后POP出栈操作,SP重新位于上图红色位置。
- 函数返回值的时候,同样通过
r0实现,SP虽然向上移动了,但是r0中有返回值。
调用函数结束后,执行STR将r0中的运算结果写入到变量b。
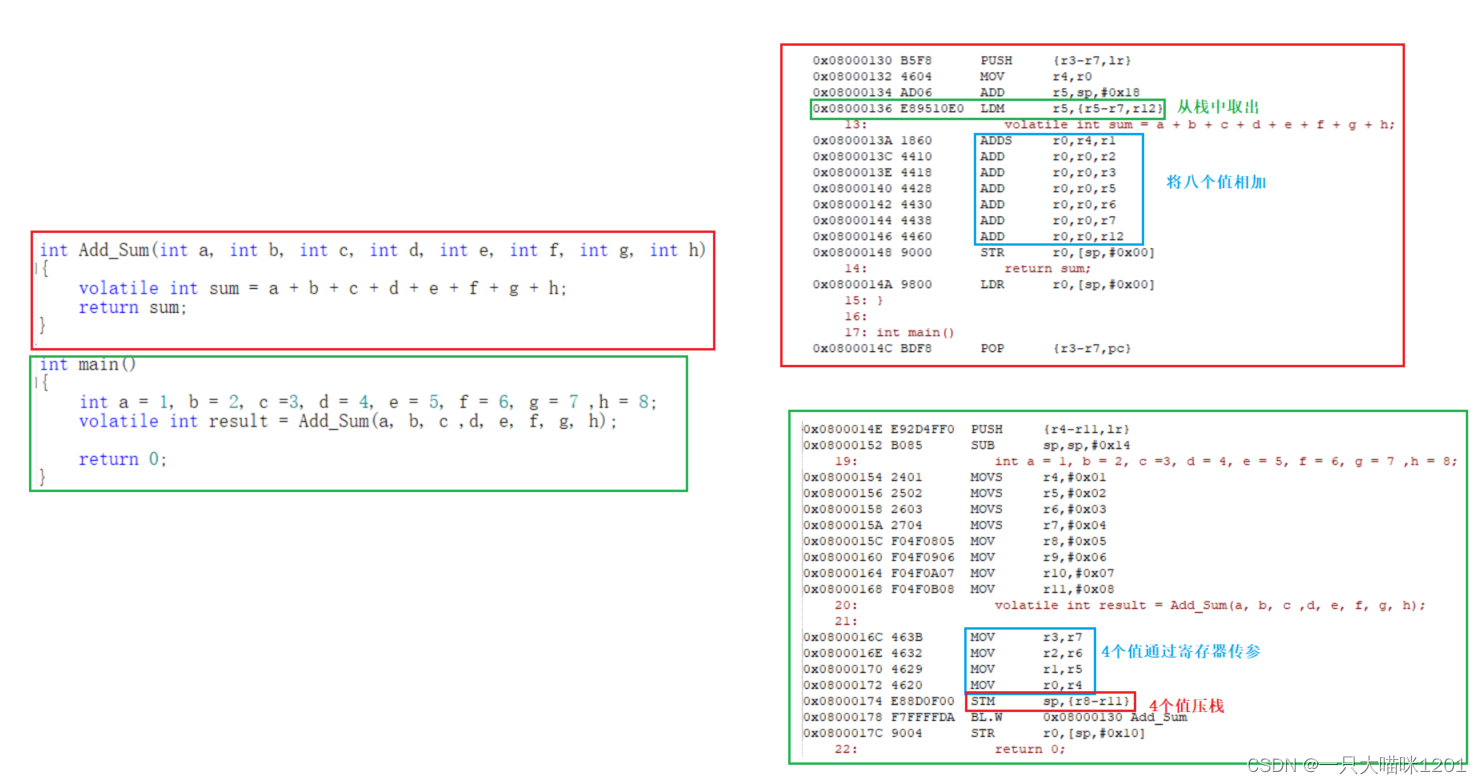
如上图,main函数在调用Add_Sum函数的时候,一次传入了八个变量,赋了初值以后,将其中的四个变量交给了寄存器r3-r7,然后执行STM sp,[r8-r11],将剩下的四个变量继续压栈。
- STM:一次存储多个寄存器中的值到指定位置。
在执行Add_Sum函数的时候,执行LDM r5,[r5-r7,r12],从栈中将后四个变量取出来,再与寄存器r3-r7中的四个值一起求和,最后将结果返回。
- LDM:一次读取多个值到多个寄存器中。
调用函数时,如果传入的变量比较多,或者是数组的话,由于没有那么多的寄存器可以作中间人,所以会将这些变量继续压入调用方的栈中,被调用函数在用的时候从调用方的栈中拿走进行拷贝。
这就是为什么我们在函数中改变形参,并不影响实参的原因,因为在函数中形参是实参的拷贝,它位于函数的栈中,调用方的栈并不受影响。
🍞指针变量
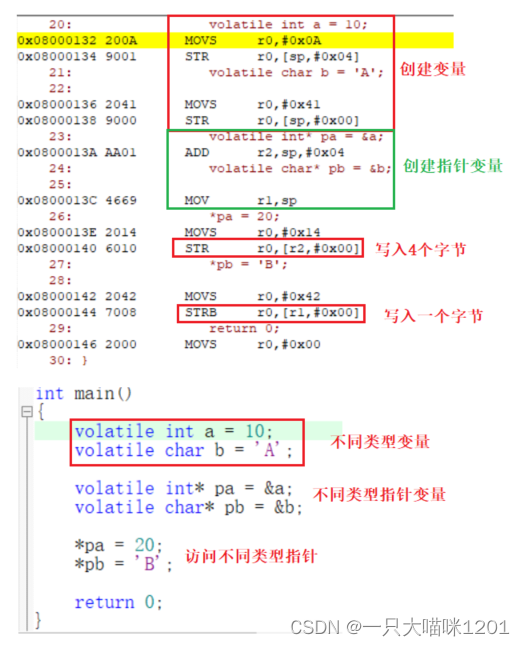
如上图,创建了一个int类型的变量,一个char类型的变量,一个int* 类型的变量,一个char* 类型的变量,从汇编出可以看出,指针变量同样要在栈中占用空间,只是初始化的时候,指针变量赋值的是地址,如ADD r2,sp,#0x04,就是将栈顶指针向上移动4个字节后的地址赋值给为int* pa变量占坑的r2。
- 指针变量仍然是变量,是变量就要占据内存空间,和普通的变量没有区别,只是它的值是地址而已。
在访问这两个指针变量时,*pa = 20,执行了STR r0,[r2,0x00],一次给变量a写入四个字节,*pb = 'B',执行了STRB r0,[r11#0x00],一次给变量b写入一个字节。
- STRB:存储一个字节数据,作用和STR一样,只是写入字节是一个字节。
访问不同类型的指针,底层会有不同的策略,让CPU以对应的视角去操作对应的内存。如*pa,CPU就会认为它现在访问地址处的变量是一个int类型,而不是一个char类型。
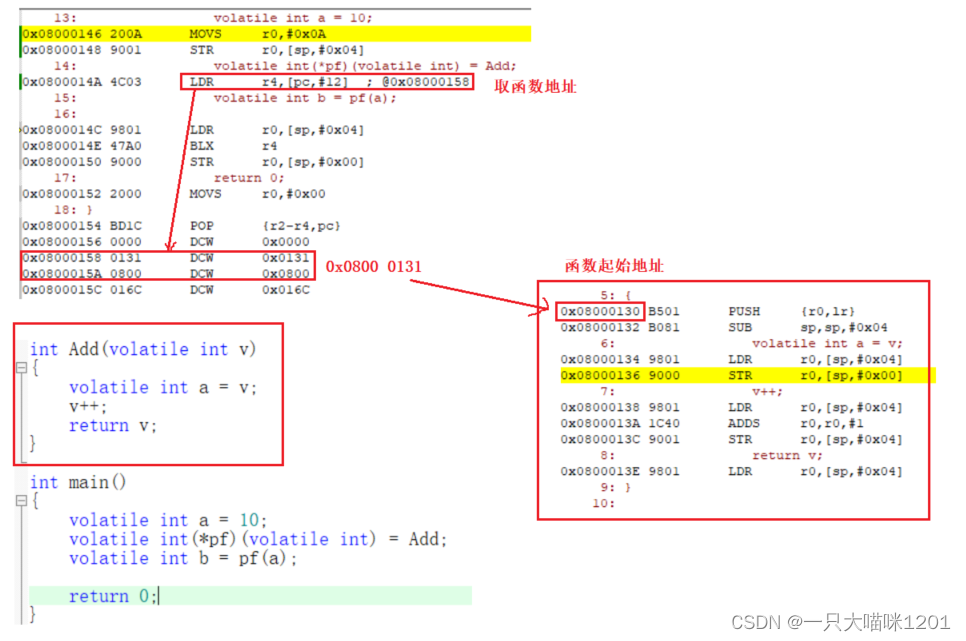
如上图,创建函数指针变量int(*pf)(volatile int),将函数Add地址赋值给变量pf。执行LDR r4,[pc,#12]到Flash的0x0800 0158处取函数地址为0x0800 0131。
但是我们看到函数的8条指令的起始地址是0x0800 0130,与r4中取到的函数地址相差1,这是因为在0x0800 0158处存放的0x0800 0131代表两层意思。
- 函数地址的最低位为1表示该函数使用的是
Thumb指令集,这个1和实际地址没有关系。- 该值减去1才是真正的函数起始地址,也就是
0x0800 0130。
无论什么类型的指针变量,它里面存放的都是相应变量的首地址,包括函数指针变量,再通过策略决定CPU读写该首地址后面几个字节。
🍞结构体和联合体
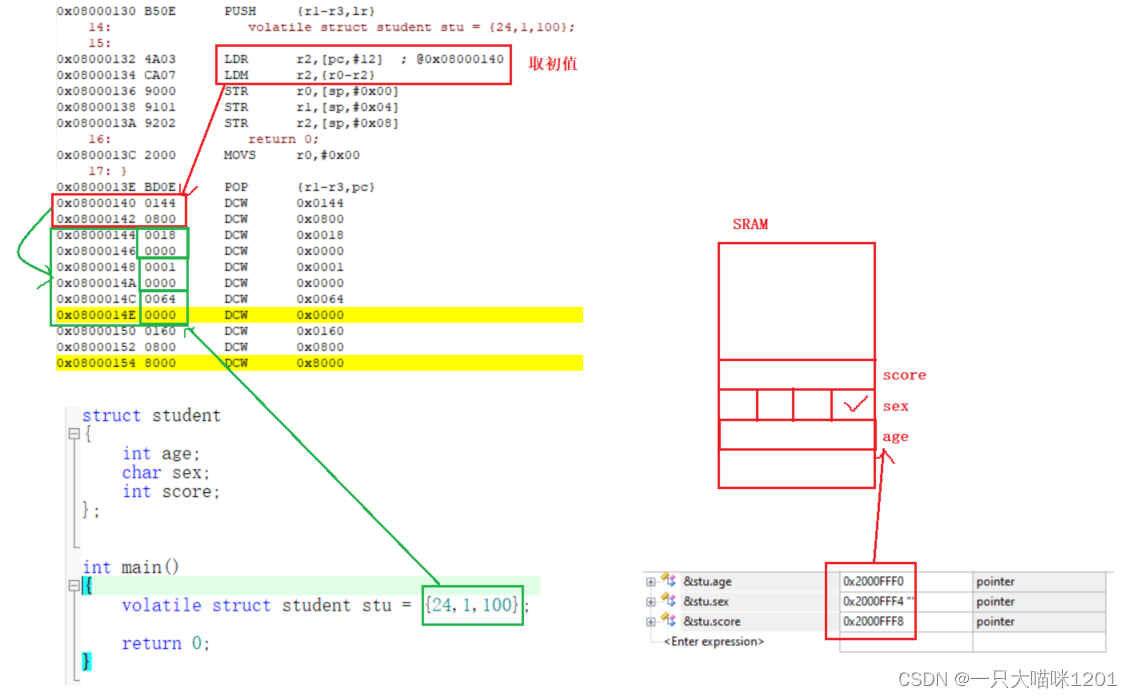
如上图,创建一个局部结构体变量,有三个成员变量int age,char sex,int score,并且给它们初始化。先执行LDR拿到在Flash中存放初始值的地址0x0800 0144到r2中,然后再执行LDM从初值起始地址开始读取初值0x0000 18,0x0000 00001,0x0000 0064,对应着24,1,100。
- 结构体初始化时,初值存放在
Flash中,需要读取到寄存器中,然后再赋值给结构体各个成员。
通过调试窗口查看三个成员的地址,发现成员之间的地址相差4个字节,其中int age和int score是四字节变量占用4个空间,但是char sex是一字节变量也占用四个空间。
如上图中SRAM示意图所示,此时sex的四个字节中只用了一个字节,浪费了三个字节。
- 为了提高结构体的访问效率,结构体变量在存放时会进行内存对齐。
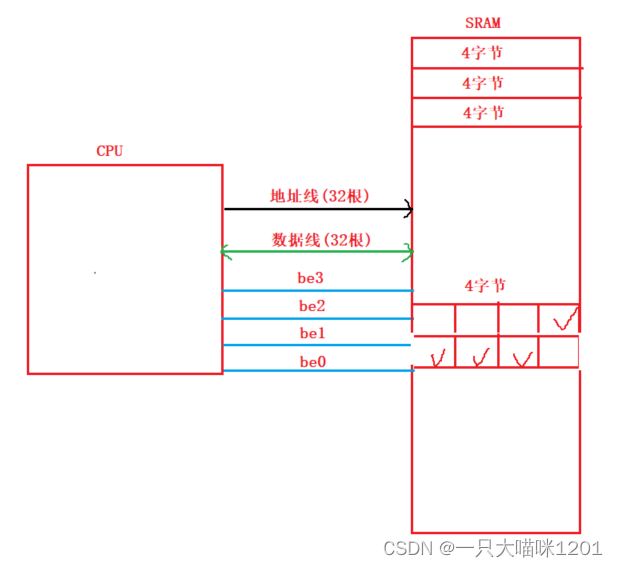
如上图,数据线和地址线都是32位的,也就是4字节,除此之外还有四根控制线be0,be1,be2,be3。无论是访问还是写入,CPU一次操作都是四个字节的内存。
当be0有效时,CPU操作4个字节中第1个字节的空间,be1有效就操作第2个字节的空间,be2有效就操作第3个字节的空间,be3有效就操作第4个字节的空间。
如果操作的是第一个4字节中的3个字节和第二个4字节的1个字节组成的四字节空间,CPU就需要操作两次,第一次操作时be1,be2,be3有效,第二次操作时be0有效,最后组合得到需要的数据。
采用结构体内存对齐方案,虽然char sex浪费了三个字节的空间,但是在操作int score的时候,可以一次性操作完毕,不需要第二次。
- 结构体对齐利用了以空间换时间的思想。
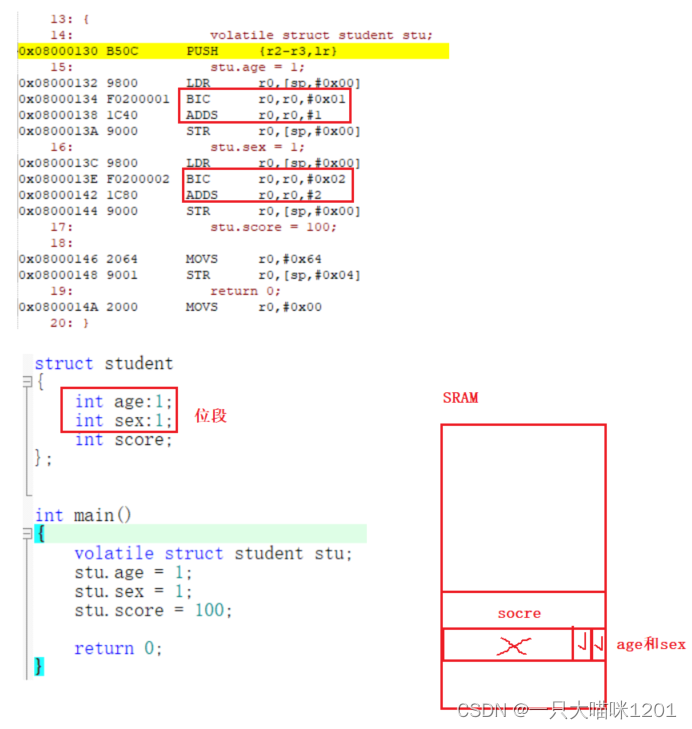
如上图,创建一个位段结构体,成员age和sex都只占用int的32个比特位中的1个比特位,成员score占4个字节32个比特位。
先执行LDR取数据,然后执行BIC r0,r0,#0x01将r0中的32个比特位的第一个比特位清0,然后再执行ADDS r0,r0,#1让第一个比特位的值成为1,此时给int age:1初始化完成。
- BIC:清除指定比特位,让该位为0。
同理,再给int sex:1初始化为1,也就是让32个比特位中的第二个比特位为1。此时还剩下30个比特位被浪费掉了,下一个int score占用完整的32个比特位,同样是为了提高效率。
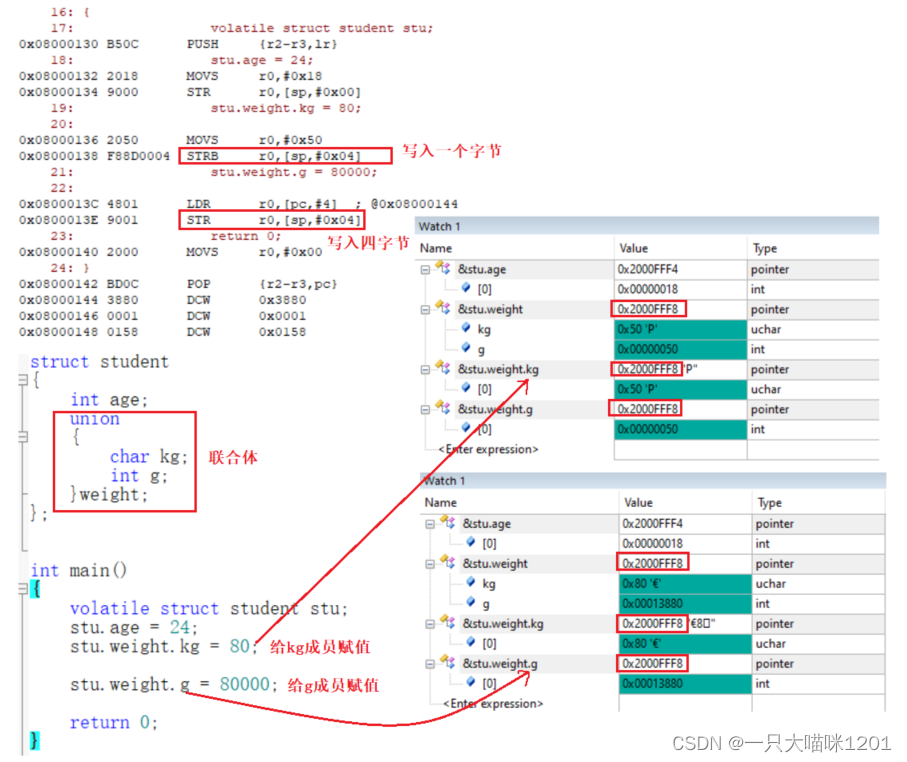
如上图,结构体中又增加了一个联合体成员union weight,char kg和int g两种类型的变量共用这一个空间。而且可以看到,weight,kg,g三者的地址都是0x2000 FFF8。
在给成员kg赋值80的时候,整个weight空间的值是0x0000 0050,在给成员g赋值的时候,整个weight空间的值是0x0001 3880。操作char类型成员,只改变4个字节中的一个字节,操作int类型成员,则4个字节全部改变。
对应的汇编代码中,操作char成员使用的是STRB,操作int成员使用的是STR。
🍞总结
如上图便是本喵在这篇文章中讲解的ARM架构部分模型,以及常用C语言知识在ARM架构中是如何体现的。
程序在经过预处理,编译,汇编,最后再经过连接器分配地址形成.axf,.bin,或者.hex等类型的文件,这几种文件中的内容全部都是机器码。
将最终的机器码烧录到单片机中,单片机一上电就开始执行这些机器码,执行过程中是没有编译器,电脑系统的参与的,无论是变量的定义,初始化,还是内存空间的分配,你还能说是自动完成的吗?
所以说,当程序在单片机中开始运行的时候,它的一切就早被安排好了,就是按照本喵前面所讲述的去安排设计的,CPU只需要按照机器码执行即可。
- 其中地址的分配主要是由连接器完成。
相关文章:
【RTOS学习】单片机中的C语言
🐱作者:一只大喵咪1201 🐱专栏:《RTOS学习》 🔥格言:你只管努力,剩下的交给时间! 本喵默认各位小伙伴都会C语言,我们平时学习C语言都是在Windows环境下学习的࿰…...

确知波束形成matlab仿真
阵列信号处理中的导向矢量 假设一均匀线性阵列,有N个阵元组成,满足:远场、窄带假设。 图1. 均匀线性阵模型 假设信源发射信号,来波方向为 θ \theta θ,第一个阵元接收到的信号为 x ( t ) x(t) x(t),则第…...

并发编程相关面试题
线程基础 线程和进程的区别: ----------------------------------------------------------------------- 创建线程的方式: 1 继承Thread类 2 实现runnable接口 3 实现callable 接口(有返回值的) 4 线程池创建线程 ------…...
Cpp/Qt-day050921Qt
目录 实现使用数据库的登录注册功能 头文件: registrwidget.h: widget.h: 源文件: registrwidget.c: widget.h: 效果图: 思维导图 实现使用数据库的登录注册功能 头文件: registrwidget.h: #ifndef REGISTRWIDGET_H #de…...

视频汇聚/视频云存储/视频监控管理平台EasyCVR分发rtsp流起播慢优化步骤详解
安防视频监控/视频集中存储/云存储/磁盘阵列EasyCVR平台可拓展性强、视频能力灵活、部署轻快,可支持的主流标准协议有国标GB28181、RTSP/Onvif、RTMP等,以及支持厂家私有协议与SDK接入,包括海康Ehome、海大宇等设备的SDK等。平台既具备传统安…...

ElementUI之登陆+注册->饿了吗完成用户登录界面搭建,axios之get请求,axios之post请求,跨域,注册界面
饿了吗完成用户注册登录界面搭建axios之get请求axios之post请求跨域 1.饿了吗完成用户注册登录界面搭建 将端口号8080改为8081 导入依赖,在项目根目录使用命令npm install element-ui -S,添加Element-UI模块 -g:将依赖下载node_glodal全局依…...

2023华为杯研究生数学建模研赛E题出血脑卒中完整论文(含28个详细预处理数据及结果表格)
大家好呀,从发布赛题一直到现在,总算完成了全国研究生数学建模竞赛(数模研赛)E题完整的成品论文。 本论文可以保证原创,保证高质量。绝不是随便引用一大堆模型和代码复制粘贴进来完全没有应用糊弄人的垃圾半成品论文。…...

Java中的继承是什么?
在Java中,继承是一种面向对象编程的概念,它允许一个类(称为子类或派生类)继承另一个类(称为父类或基类)的属性和方法。通过继承,子类可以获得父类的属性和方法,并且可以添加自己的特…...

Python - flask后端开发笔记
Flask入门 有一篇很全面的博客可以参考:Python Flask Web 框架入门 跨域问题处理 from flask_cors import CORS CORS(app,supports_credentialsTrue,origins[url], # 前端url列表 ) 文件发送 from flask import send_from_directory app.route(/download) …...
Flutter实现PS钢笔工具,实现高精度抠图的效果。
演示: 代码: import dart:ui;import package:flutter/material.dart hide Image; import package:flutter/services.dart; import package:flutter_screenutil/flutter_screenutil.dart; import package:kq_flutter_widgets/widgets/animate/stack.dart…...

苏宁滑块验证
网址:https://passport.suning.com/ids/login总结一下,别被他的表面现象给骗了,这玩意儿,个人认为,腾讯的都没法跟他比!!! 难点:动态混淆,vmp,图片…...

c语言。。。
gcc thread.c -lpthread -o app -fexec-charsetgbkthread.c为当前目录下编写的c代码 代码中引入了<pthread.h>线程库,所以要加上-lpthread -o app 输出.exe的c可执行文件,文件名为app -fexec-charsetgbk 设置编码方式,防止控制台输出中…...

vue-cli创建项目、vue项目目录结(运行vue项目)、ES6导入导出语法、vue项目编写规范
vue-cli创建项目、vue项目目录结构、 ES6导入导出语法、vue项目编写规范 1 vue-cli创建项目 1.1 vue-cli 命令行创建项目 1.2 使用vue-cli-ui创建 2 vue项目目录结构 2.1 运行vue项目 2.2 vue项目的目录结构 3 es6导入导出语法 4 vue项目编写规范 4.1 修改项目 4.2 以后…...

QT读取DLL加载算法
有这样一个场景,我有一个GUI软件,把他想象成PS软件,集成了很多工具。现在我要添加新算法(PS工具),该怎么办? 有三种办法: 第一种我把新算法代码加到项目中,编译整个项目。 第二种,新…...

HTTPX-用于Python的下一代HTTP客户端
1、前言 在使用 Python 进行接口自动化时,大多数都会使用 requests 模块,requests 是一个常用的 HTTP 请求库,可以方便地向网站发送 HTTP 请求,并获取响应结果。 本篇将介绍 Python 的下一代 HTTP 客户端 - HTTPX 2、简介 HTT…...

[LLM+AIGC] 01.应用篇之中文ChatGPT初探及利用ChatGPT润色论文对比浅析(文心一言 | 讯飞星火)
近年来,人工智能技术火热发展,尤其是OpenAI在2022年11月30日发布ChatGPT聊天机器人程序,其使用了Transformer神经网络架构(GPT-3.5),能够基于在预训练阶段所见的模式、统计规律和知识来生成回答,…...
OCR -- 文本检测
目标检测: 不仅要解决定位问题,还要解决目标分类问题,给定图像或者视频,找出目标的位置(box),并给出目标的类别; 文本检测: 给定输入图像或者视频,找出文本的…...
【系统架构】软件可靠性基础知识
导读:本文整理关于软件可靠性基础知识构建系统架构知识体系。完整和扎实的系统架构知识体系是作为架构设计的理论支撑,基于大量项目实践经验基础上,不断加深理论体系的理解,从而能够创造新解决系统相关问题。 目录 1、软件可靠性…...

相机Camera
Camera需与SurfaceView配合使用 Camera类常用方法: Camera.open() 创建Camera实例,打开相机 getParameters() 获取相机参数 release() 释放相机资源 setParameters(Camera.Parameters parameters) 设置相机参数 setPreviewDisplay(SurfaceHolder holde…...
洛谷P8815:逻辑表达式 ← CSP-J 2022 复赛第3题
【题目来源】https://www.luogu.com.cn/problem/P8815https://www.acwing.com/problem/content/4733/【题目描述】 逻辑表达式是计算机科学中的重要概念和工具,包含逻辑值、逻辑运算、逻辑运算优先级等内容。 在一个逻辑表达式中,元素的值只有两种可能&a…...
 模块,可以直接加载和运行,通过PyTorch AI框架训练好的模型,而不需要安装PyTorch AI框架)
[具身智能-229]:OpenCV 的 DNN (Deep Neural Networks) 模块,可以直接加载和运行,通过PyTorch AI框架训练好的模型,而不需要安装PyTorch AI框架
OpenCV 的 DNN (Deep Neural Networks) 模块确实是工业界和边缘计算领域非常推崇的推理引擎。它的核心定位不是“训练模型”,而是“让训练好的模型跑得更快、更轻、更通用”。它允许开发者在不依赖庞大的 TensorFlow 或 PyTorch 库的情况下,直接在生产环…...

Maven父子工程搭建:微服务项目模块化架构基础
Maven父子工程搭建:微服务项目模块化架构基础 一、为什么需要Maven父子工程? 在单体应用向微服务架构演进的过程中,项目规模会迅速膨胀。想象一个电商系统,包含用户中心、商品服务、订单服务、支付服务、库存服务等数十个模块—…...

2009 Text 1
2009 Text 1...

2026届毕业生推荐的AI学术工具实测分析
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 于毕业论文写作进程里,人工智能工具可充作辅助方式用以提高效率。学生能借AI开展…...

STM32F107单片机驱动Dp83848以太网芯片程序 项目开发用到了Dp83848这一个以...
STM32F107单片机驱动Dp83848以太网芯片程序 项目开发用到了Dp83848这一个以太网芯片,本人发现其配置起来比较麻烦,所以整理了一份STM32F107单片机驱动Dp83848的程序代码例程,方便大家学习相关代码的配置最近在项目里折腾STM32F107和DP83848这…...

人声分离实战指南:从UVR、Demucs到Spleeter的模型选型与场景适配
1. 人声分离技术入门:为什么我们需要它? 第一次接触人声分离技术是在去年帮朋友做婚礼视频的时候。当时需要把现场嘈杂的背景音和人声分开,试了各种音频编辑软件都没法完美解决,直到发现了这些开源工具。简单来说,人声…...

避开带宽陷阱:用低成本示波器搞定MIPI CSI-2信号的眼图与时序分析
避开带宽陷阱:用低成本示波器搞定MIPI CSI-2信号的眼图与时序分析 当你手头只有一台几百MHz带宽的示波器,却要分析动辄上Gbps的MIPI CSI-2高速信号时,是否感到无从下手?别担心,这篇文章将带你突破硬件限制,…...

工程师快速解决TVA检测系统常见故障的实操技巧
TVA系统在汽车零部件焊接点检测中需长期连续运行,适配高节拍生产场景,作为负责系统运维的工程师,快速排查与解决常见故障,是保障系统稳定运行的核心职责。在实际运维过程中,不少工程师因对故障原因判断不准确、排查方法…...

Windows下OpenClaw安装教程:一键部署Kimi-VL-A3B-Thinking镜像
Windows下OpenClaw安装教程:一键部署Kimi-VL-A3B-Thinking镜像 1. 为什么选择OpenClawKimi-VL组合 上周我在整理电脑上的图片素材时,突然冒出一个想法:如果能有个AI助手帮我自动分类这些图片,还能根据内容生成描述文字该多好。经…...

自感的奠基与哲学的转轨:一项元哲学视域中的全球思想比较研究
自感的奠基与哲学的转轨:一项元哲学视域中的全球思想比较研究摘要本文以岐金兰的“自感-痕迹论”与“大儒家观”为核心参照框架,在全球哲学的前沿版图中,对当代试图回应人工智能时代意义危机的代表性思想体系展开系统性的元哲学比较研究。本文…...