【Verilog 教程】6.2Verilog任务
关键词:任务
任务与函数的区别
和函数一样,任务(task)可以用来描述共同的代码段,并在模块内任意位置被调用,让代码更加的直观易读。函数一般用于组合逻辑的各种转换和计算,而任务更像一个过程,不仅能完成函数的功能,还可以包含时序控制逻辑。下面对任务与函数的区别进行概括:

任务
任务声明
任务在模块中任意位置定义,并在模块内任意位置引用,作用范围也局限于此模块。
模块内子程序出现下面任意一个条件时,则必须使用任务而不能使用函数。
1)子程序中包含时序控制逻辑,例如延迟,事件控制等
2)没有输入变量
3)没有输出或输出端的数量大于 1
Verilog 任务声明格式如下:
task task_id ;port_declaration ;procedural_statement ;
endtask任务中使用关键字 input、output 和 inout 对端口进行声明。input 、inout 型端口将变量从任务外部传递到内部,output、inout 型端口将任务执行完毕时的结果传回到外部。
进行任务的逻辑设计时,可以把 input 声明的端口变量看做 wire 型,把 output 声明的端口变量看做 reg 型。但是不需要用 reg 对 output 端口再次说明。
对 output 信号赋值时也不要用关键字 assign。为避免时序错乱,建议 output 信号采用阻塞赋值。
例如,一个带延时的异或功能 task 描述如下:
task xor_oper_iner;input [N-1:0] numa;input [N-1:0] numb;output [N-1:0] numco ;//output reg [N-1:0] numco ; //无需再注明 reg 类型,虽然注明也可能没错#3 numco = numa ^ numb ;//assign #3 numco = numa ^ numb ; //不用assign,因为输出默认是reg
endtask
任务在声明时,也可以在任务名后面加一个括号,将端口声明包起来。
上述设计可以更改为:
task xor_oper_iner(input [N-1:0] numa,input [N-1:0] numb,output [N-1:0] numco ) ; #3 numco = numa ^ numb ;
endtask
任务调用
任务可单独作为一条语句出现在 initial 或 always 块中,调用格式如下:
task_id(input1, input2, …,outpu1, output2, …);
任务调用时,端口必须按顺序对应。
输入端连接的模块内信号可以是 wire 型,也可以是 reg 型。输出端连接的模块内信号要求一定是 reg 型,这点需要注意。
对上述异或功能的 task 进行一个调用,完成对异或结果的缓存。
module xor_oper#(parameter N = 4)(input clk ,input rstn ,input [N-1:0] a ,input [N-1:0] b ,output [N-1:0] co );reg [N-1:0] co_t ;always @(*) begin //任务调用xor_oper_iner(a, b, co_t);endreg [N-1:0] co_r ;always @(posedge clk or negedge rstn) beginif (!rstn) beginco_r <= 'b0 ;endelse beginco_r <= co_t ; //数据缓存endendassign co = co_r ;/*------------ task -------*/task xor_oper_iner;input [N-1:0] numa;input [N-1:0] numb;output [N-1:0] numco ;#3 numco = numa ^ numb ; //阻塞赋值,易于控制时序endtaskendmodule
对上述异或功能设计进行简单的仿真,testbench 描述如下。
激励部分我们使用简单的 task 进行描述,激励看起来就更加的清晰简洁。
其实,task 最多的应用场景还是应用于 testbench 中进行仿真。task 在一些编译器中也不支持综合。
`timescale 1ns/1nsmodule test ;reg clk, rstn ;initial beginrstn = 0 ;#8 rstn = 1 ;forever beginclk = 0 ; # 5;clk = 1 ; # 5;endendreg [3:0] a, b;wire [3:0] co ;initial begina = 0 ;b = 0 ;sig_input(4'b1111, 4'b1001, a, b);sig_input(4'b0110, 4'b1001, a, b);sig_input(4'b1000, 4'b1001, a, b);endtask sig_input ;input [3:0] a ;input [3:0] b ;output [3:0] ao ;output [3:0] bo ;@(posedge clk) ;ao = a ;bo = b ;endtask ; // sig_inputxor_oper u_xor_oper(.clk (clk ),.rstn (rstn ),.a (a ),.b (b ),.co (co ));initial beginforever begin#100;if ($time >= 1000) $finish ;endendendmodule // test
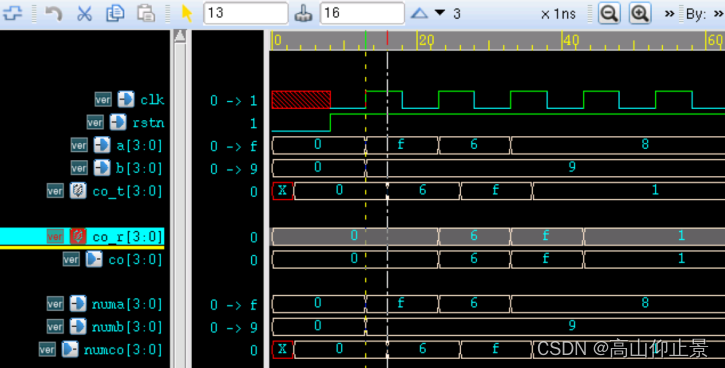
仿真结果如下。
由图可知,异或输出逻辑结果正确,相对于输入有 3ns 的延迟。
且连接信号 a,b,co_t 与任务内部定义的信号 numa,numb,numco 状态也保持一致。
任务操作全局变量
因为任务可以看做是过程性赋值,所以任务的 output 端信号返回时间是在任务中所有语句执行完毕之后。
任务内部变量也只有在任务中可见,如果想具体观察任务中对变量的操作过程,需要将观察的变量声明在模块之内、任务之外,可谓之"全局变量"。
例如有以下 2 种尝试利用 task 产生时钟的描述方式。
//way1 to decirbe clk generating, not work
task clk_rvs_iner ;output clk_no_rvs ;# 5 ; clk_no_rvs = 0 ;# 5 ; clk_no_rvs = 1 ;
endtask
reg clk_test1 ;
always clk_rvs_iner(clk_test1);//way2: use task to operate global varialbes to generating clk
reg clk_test2 ;
task clk_rvs_global ;# 5 ; clk_test2 = 0 ;# 5 ; clk_test2 = 1 ;
endtask // clk_rvs_iner
always clk_rvs_global;
仿真结果如下。
第一种描述方式,虽然任务内部变量会有赋值 0 和赋值 1 的过程操作,但中间变化过程并不可见,最后输出的结果只能是任务内所有语句执行完毕后输出端信号的最终值。所以信号 clk_test1 值恒为 1,此种方式产生不了时钟。
第二种描述方式,虽然没有端口信号,但是直接对"全局变量"进行过程操作,因为该全局变量对模块是可见的,所以任务内信号翻转的过程会在信号 clk_test2 中体现出来。

automatic 任务
和函数一样,Verilog 中任务调用时的局部变量都是静态的。可以用关键字 automatic 来对任务进行声明,那么任务调用时各存储空间就可以动态分配,每个调用的任务都各自独立的对自己独有的地址空间进行操作,而不影响多个相同任务调用时的并发执行。
如果一任务代码段被 2 处及以上调用,一定要用关键字 automatic 声明。
当没有使用 automatic 声明任务时,任务被 2 次调用,可能出现信号间干扰,例如下面代码描述:
task test_flag ;input [3:0] cnti ;input en ;output [3:0] cnto ;if (en) cnto = cnti ;
endtaskreg en_cnt ;
reg [3:0] cnt_temp ;
initial beginen_cnt = 1 ;cnt_temp = 0 ;#25 ; en_cnt = 0 ;
end
always #10 cnt_temp = cnt_temp + 1 ;reg [3:0] cnt1, cnt2 ;
always @(posedge clk) test_flag(2, en_cnt, cnt1); //task(1)
always @(posedge clk) test_flag(cnt_temp, !en_cnt, cnt2);//task(2)
仿真结果如下。
en_cnt 为高时,任务 (1) 中信号 en 有效, cnt1 能输出正确的逻辑值;
此时任务 (2) 中信号 en 是不使能的,所以 cnt2 的值被任务 (1) 驱动的共用变量 cnt_temp 覆盖。
en_cnt 为低时,任务 (2) 中信号 en 有效,所以任务 (2) 中的信号 cnt2 能输出正确的逻辑值;而此时信号 cnt1 的值在时钟的驱动下,一次次被任务 (2) 驱动的共用变量 cnt_temp 覆盖。
可见,任务在两次并发调用中,共用存储空间,导致信号相互间产生了影响。
其他描述不变,只在上述 task 声明时加入关键字 automatic,如下所以。
task automatic test_flag ;
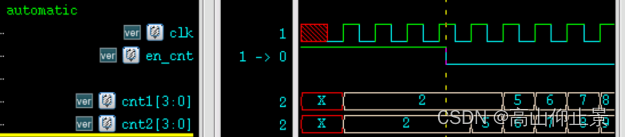
此时仿真结果如下。
en_cnt 为高时,任务 (1) 中信号 cnt1 能输出正确的逻辑值,任务 (2) 中信号 cnt2 的值为 X;
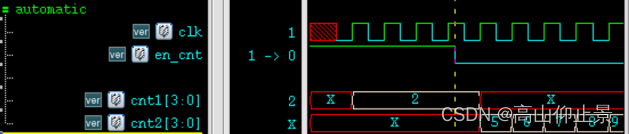
en_cnt 为低时,任务 (2) 中信号 cnt2 能输出正确的逻辑值,任务 (1) 中信号 cnt1 的值为 X;
可见,任务在两次并发调用中,因为存储空间相互独立,信号间并没有产生影响。
相关文章:
【Verilog 教程】6.2Verilog任务
关键词:任务 任务与函数的区别 和函数一样,任务(task)可以用来描述共同的代码段,并在模块内任意位置被调用,让代码更加的直观易读。函数一般用于组合逻辑的各种转换和计算,而任务更像一个过程&a…...
Spring修炼之路(1)基础入门
一、简介 1.1Spring概述 Spring框架是一个轻量级的Java开发框架,它提供了一系列底层容器和基础设施,并可以和大量常用的开源框架无缝集成,可以说是开发Java EE应用程序的必备。Spring是一个轻量级的控制反转(IoC)和面向切面(AOP)的容器&…...

GANs学习记录
GAN 基于GAN的研究识别相关不同背景目标图像 可以用Augmentation2021.3.15 基于GAN的研究 是通过GAN 进行图像重建,恢复细节,去模糊,提高图像质量,图像还原,去噪等等。 识别相关 一种基于生成对抗网络的训练样本扩充…...

Flink-CDC——MySQL、SqlSqlServer、Oracle、达梦等数据库开启日志方法
目录 1. 前言 2. 数据源安装与配置 2.1 MySQL 2.1.1 安装 2.1.2 CDC 配置 2.2 Postgresql 2.2.1 安装 2.2.2 CDC 配置 2.3 Oracle 2.3.1 安装 2.3.2 CDC 配置 2.4 SQLServer 2.4.1 安装 2.4.2 CDC 配置 2.5达梦 2.4.1安装 2.4.2CDC配置 3. 验证 3.1 Flink版…...

linux设置tomcat redis开机自启动
设置Tomcat自启动 1.修改 /etc/rc.d/rc.local 文件 [rootiowZ]# vim /etc/rc.d/rc.local在/etc/rc.d/rc.local文件最后加上: export JAVA_HOME/usr/local/jdk /usr/local/apache-tomcat-8.5.73/bin/startup.sh start退出vim并保存修改的文件。 说明:/u…...

跨域问题讨论
问题 跨域定义 当一个请求url的协议、域名、端口三者之间任意一个与当前页面地址不同即为跨域。 跨域的安全隐患(CSRF攻击) 也就是说,一旦允许跨域,意味着允许恶意网站随意攻击可信网站,带来安全风险。 这里面有一…...

ESP32设备通信-两个ESP32设备之间HTTP通信
两个ESP32设备之间HTTP通信 文章目录 两个ESP32设备之间HTTP通信1、应用介绍2、软件准备3、硬件准备4、代码实现4.1 ESP32服务器节点代码4.2 ESP32客户端节点代码在本文中,我们将介绍如何在没有任何物理路由器或互联网连接的情况下使用 Wi-Fi 在两个 ESP32 开发板之间执行无线…...
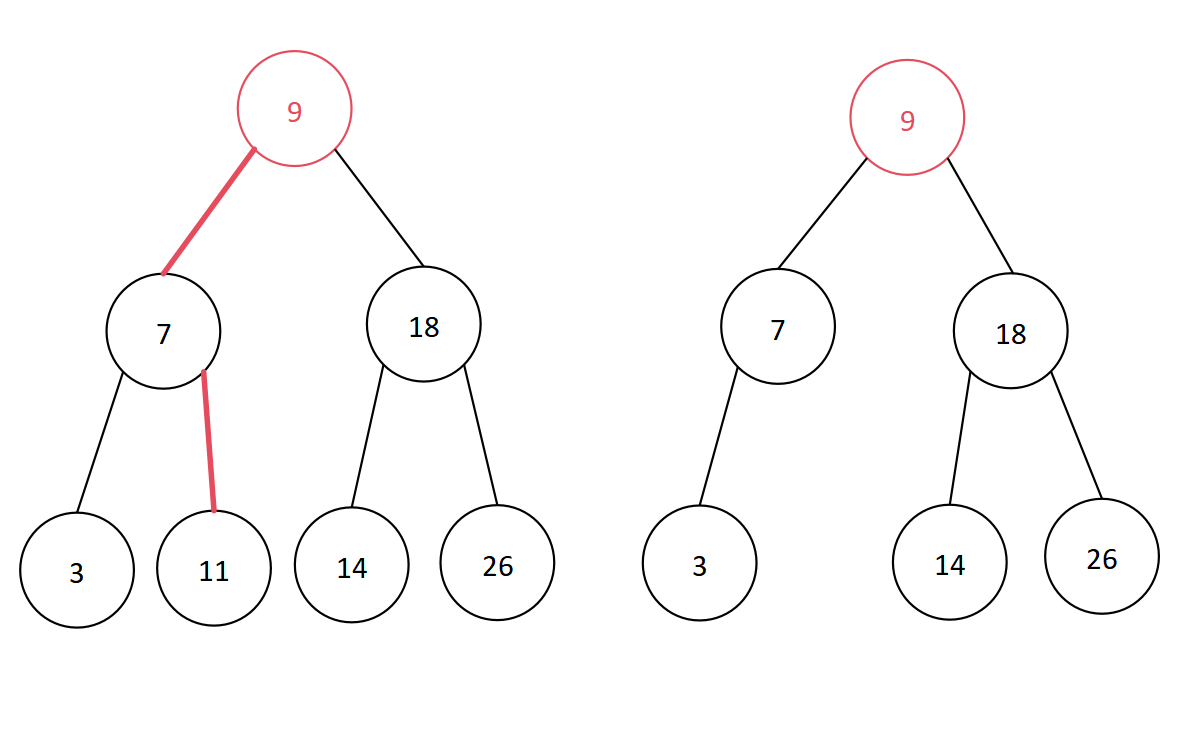
数据结构学习笔记——查找算法中的树形查找(平衡二叉树)
目录 一、平衡二叉树的定义二、平衡因子三、平衡二叉树的插入和构造(一)LL型旋转(二)LR型旋转(三)RR型旋转(四)RL型旋转 四、平衡二叉树的删除(一)叶子结点&a…...

P1830 轰炸III
题目背景 一个大小为 ��nm 的城市遭到了 �x 次轰炸,每次都炸了一个每条边都与边界平行的矩形。 题目描述 在轰炸后,有 �y 个关键点,指挥官想知道,它们有没有受到过轰炸,如…...

大语言模型LLM知多少?
你知道哪些流行的大语言模型?你都体验过哪写? GPT-4,Llamma2, T5, BERT 还是 BART? 1.GPT-4 1.1.GPT-4 模型介绍 GPT-4(Generative Pre-trained Transformer 4)是由OpenAI开发的一种大型语言模型。GPT-4是前作GPT系列模型的进一步改进,旨在提高语言理解和生成的能力,…...

Redis命令行使用Lua脚本
Redis命令行使用Lua脚本 Lua脚本在Redis中的使用非常有用,它允许你在Redis服务器上执行自定义脚本,可以用于复杂的数据处理、原子性操作和执行多个Redis命令。以下是Lua脚本在Redis中的基本使用详细讲解: 运行Lua脚本: 在Redis中…...

HTML详细基础(三)表单控件
本帖介绍web开发中非常核心的标签——表格标签。 在日常我们使用到的各种需要输入用户信息的场景——如下图,均是通过表格标签table创造出来的: 目录 一.表格标签 二.表格属性 三.合并单元格 四.无序列表 五.有序列表 六.自定义标签 七.表单域 …...

map和set的具体用法 【C++】
文章目录 关联式容器键值对setset的定义方式set的使用 multisetmapmap的定义方式insertfinderase[]运算符重载map的迭代器遍历 multimap 关联式容器 关联式容器里面存储的是<key, value>结构的键值对,在数据检索时比序列式容器效率更高。比如:set…...
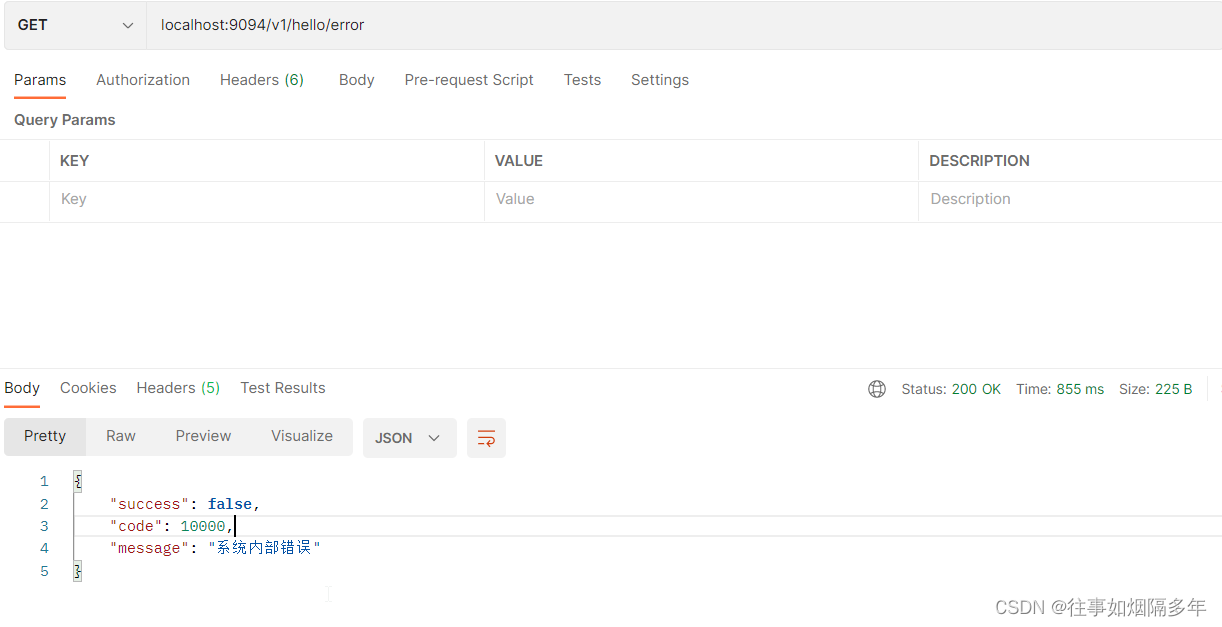
聚合统一,SpringBoot实现全局响应和全局异常处理
目录 前言 全局响应 数据规范 状态码(错误码) 全局响应类 使用 优化 全局异常处理 为什么需要全局异常处理 业务异常类 全局捕获 使用 优化 总结 前言 在悦享校园1.0版本中的数据返回采用了以Map对象返回的方式,虽然较为便捷但也带来一些问题。一是在…...
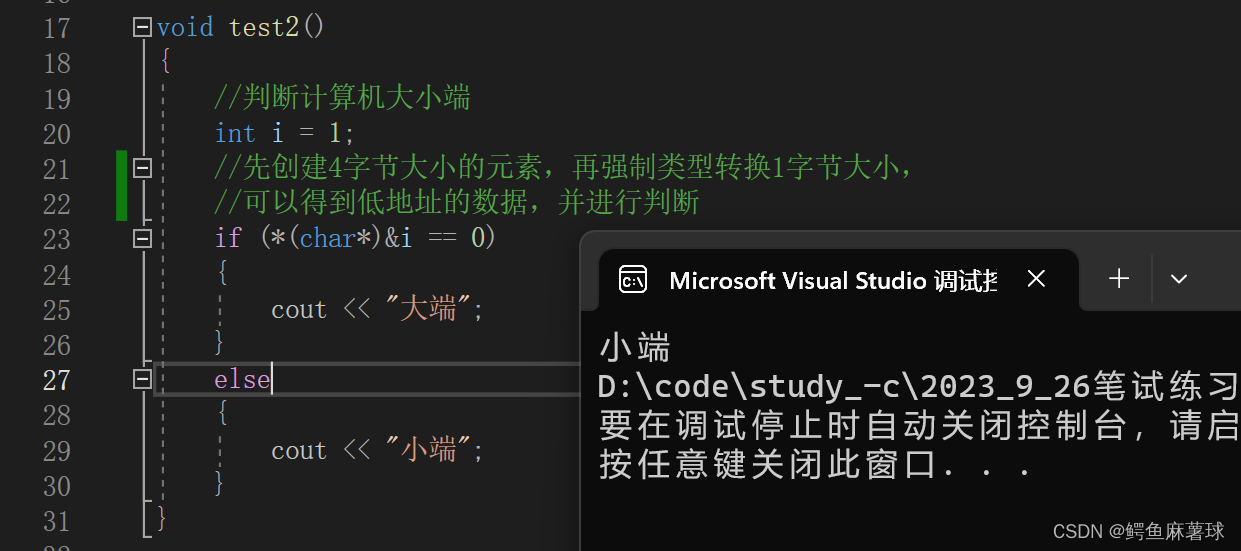
【C/C++笔试练习】——数组名和数组名、switch循环语句、数据在计算机中的存储顺序、字符串中找出连续最长的数字串、数组中出现次数超过一半的数字
文章目录 C/C笔试练习1.数组名和&数组名(1)数组名和&数组名的差异(2)理解数组名和指针偏移(3)理解数组名代表的含义(4)理解数组名代表的含义 2.switch循环语句(6…...
力扣每日一题(+日常水题|树型dp)
740. 删除并获得点数 - 力扣(LeetCode) 简单分析一下: 每一个数字其实只有2个状态选 or 不 可得预处理每一个数初始状态(不选为0,选为所有x的个数 * x)累加即可 for(auto &x : nums)dp[x][1] x;每选一个树 i 删去 i 1 和 i - 1 故我们可以将 i…...

使用perming加速训练可预测的模型
监督学习模型的训练流程 perming是一个主要在支持CUDA加速的Windows操作系统上架构的机器学习算法,基于感知机模型来解决分布在欧式空间中线性不可分数据集的解决方案,是基于PyTorch中预定义的可调用函数,设计的一个面向大规模结构化数据集的…...

【数据库】存储引擎InnoDB、MyISAM、关系型数据库和非关系型数据库、如何执行一条SQL等重点知识汇总
目录 存储引擎InnoDB、MyISAM的适用场景 关系型和非关系型数据库的区别 MySQL如何执行一条SQL的 存储引擎InnoDB、MyISAM的适用场景 InnoDB 是 MySQL 默认的事务型存储引擎,只有在需要它不支持的特性时,才考虑使用其它存储引擎。实现了四个标准的隔…...

车道线分割检测
利用opencv,使用边缘检测、全局变化梯度阈值过滤、算子角度过滤、HLS阈值过滤的方法进行车道线分割检测,综合多种阈值过滤进行检测提高检测精度。 1.利用cv2.Sobel()计算图像梯度(边缘检测) import cv2 import numpy as np import matplotlib.pyplot a…...

树莓集团又一力作,打造天府蜂巢成都直播产业园样板工程
树莓集团再次推出惊艳之作,以打造成都天府蜂巢直播产业园为目标。该基地将充分展现成都直播产业园的巨大潜力与无限魅力,成为一个真正的产业园样板工程。 强强联手 打造未来 成都天府蜂巢直播产业园位于成都科学城兴隆湖高新技术服务产业园内࿰…...

SAP ABAP开发:别再只会用POPUP_TO_CONFIRM了,这5个实用弹出框函数帮你搞定90%交互场景
SAP ABAP开发:解锁5个被低估的弹出框函数,告别单调交互设计 在SAP ABAP开发中,弹出框是用户交互的重要桥梁。许多开发者习惯性地依赖POPUP_TO_CONFIRM,却忽略了SAP标准库中那些功能更强大、场景更匹配的交互方案。本文将带你深入探…...

Nrfr免Root SIM卡国家码修改工具:3步教程突破区域限制
Nrfr免Root SIM卡国家码修改工具:3步教程突破区域限制 【免费下载链接】Nrfr 🌍 免 Root 的 SIM 卡国家码修改工具 | 解决国际漫游时的兼容性问题,帮助使用海外 SIM 卡获得更好的本地化体验,解锁运营商限制,突破区域限…...

Bun 六天完成从 Zig 到 Rust 重写,AI 重写软件大趋势下速度与质量难题待解
Zig 版 Bun 被判“死刑”2026 年 5 月 11 日,Bun 创始人 Jarred Sumner 在 X 上发推文称,“Bun v1.3.14 将于明日发布。如果我们合并 Rust 重写版本,这将是 Zig 的最后一个版本”,宣告了 Zig 版 Bun 的终结。四年前,Bu…...

网站设计+开发一站式服务商推荐:2026老客户口碑网站建设公司盘点
在数字化转型进入深水区的当下,企业网站已从基础信息展示窗口升级为品牌塑造、营销获客与业务转化的核心枢纽,成为企业抢占市场先机的关键竞争力。然而,网站建设市场服务水平参差不齐,70%的企业曾遭遇技术过时、售后断层等问题。为…...

51单片机IO口不够用?试试用PCF8574模块驱动LCD1602,只需2根线!
51单片机IO口资源紧张?PCF8574模块驱动LCD1602的极致精简方案 当你用51单片机做项目时,是否经常遇到这样的困境:核心功能还没实现,IO口就已经捉襟见肘?特别是当需要连接LCD1602这类常用显示设备时,传统的8…...

ARM GICv3虚拟化中断机制与优化实践
1. GICv3虚拟化中断处理机制概述在ARM虚拟化架构中,通用中断控制器(GIC)扮演着关键角色。GICv3作为第三代架构,引入了全面的虚拟化支持,使得虚拟机能够高效处理中断而无需Hypervisor的频繁介入。其核心设计理念是通过虚拟CPU接口(vCPU Interf…...

Windows Defender彻底移除工具:2025终极完整使用教程
Windows Defender彻底移除工具:2025终极完整使用教程 【免费下载链接】windows-defender-remover A tool which is uses to remove Windows Defender in Windows 8.x, Windows 10 (every version) and Windows 11. 项目地址: https://gitcode.com/gh_mirrors/wi/w…...

计网实验一
课程实验报告专 业:物联网工程 班 级:2303学 号:231040700302 姓 名:杜子健实验名称:实验一实验类型:实验实验日期:2025年11月12日一 实…...

2026届毕业生推荐的降重复率助手横评
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 使AI生成内容检测率降低的关键策略是让文本的自然性以及多样性得到增强。其一,别…...

如何快速容器化100-Days-Of-ML-Code机器学习项目:终极Docker部署指南
如何快速容器化100-Days-Of-ML-Code机器学习项目:终极Docker部署指南 【免费下载链接】100-Days-Of-ML-Code 100 Days of ML Coding 项目地址: https://gitcode.com/gh_mirrors/10/100-Days-Of-ML-Code 100-Days-Of-ML-Code是一个完整的机器学习学习计划&…...