【Ubuntu18.04】Autoware.ai安装
Autoware.ai安装
- 引言
- 1 ROS安装
- 2 Ubuntu18.04安装Qt5.14.2
- 3 安装GCC、G++
- 4 Autoware.ai-1.14.0安装与编译
- 4.1 源码的编译
- 4.1.1 python2.7环境
- 4.1,2 针对Ubuntu 18.04 / Melodic的依赖包安装
- 4.1.3 先安装一些缺的ros依赖
- 4.1.4 安装eigen3.3.7
- 4.1.5 安装opencv 3.4.16
- 4.1.6 编译
- 4.1.7 运行
- 4.2 Docker Autoware环境搭建
- 4.3 运行 Autoware
- 4.4 ROSBAG Demo
引言
Autoware是世界上第一个自动驾驶all-in-one的开源软件,基于Apache2协议,在ROS机器人操作系统基础上开发而来。主要有Autoware.ai、Autoware.Auto、Autoware.Universe三个版本
Autoware的三个版本简介
AI版本是基于ROS1.0实现的,十分适合于自动驾驶初学者,也适合有快速验证科研需求的高校实验室,因此本文主要介绍Autoware.ai的安装。
1 ROS安装
参考笔者的博客即可:【ROS】Ubuntu18.04安装Ros
2 Ubuntu18.04安装Qt5.14.2
QT官网下载qt-opensource-linux-x64-5.14.2.run
执行如下的安装步骤:
sudo chmod -R 777 qt-opensource-linux-x64-5.14.2.run
sudo ./qt-opensource-linux-x64-5.14.2.run //将Qt安装在/opt目录
# 配置环境:Qt 安装完成后,先别打开,因为还需要安装其他工具以及库文件
sudo apt-get install gcc g++ //安装 linux 下编程的编译器
sudo apt-get install libqt4-dev //不然编译时会出现错误“cannot find -lgl
sudo apt-get install build-essential //它可以使得我们的程序知道头文件和库函数放在哪个位置
添加环境变量
# 1 对profile进行修改
sudo gedit /etc/profile
# 2 添加环境变量
export QTDIR=/opt/Qt5.14.2/5.14.2
export PATH=$QTDIR/gcc_64/bin:$PATH
export LD_LIBRARY_PATH=$QTDIR/gcc_64/lib:$LD_LIBRARY_PATH
# 3 生效
source /etc/profile
查看版本
qmake -v
参考链接:Ubuntu18.04安装Qt5.14.2
3 安装GCC、G++
sudo apt-get install gcc-7 gcc-7-multilib
sudo apt-get install g++-7 g++-7-multilib
如果已经安装了GCC、G++但版本不够,升级一下:
sudo apt-get install -y gcc-7
sudo apt-get install -y g++-7
cd /usr/bin
sudo rm gcc
sudo ln -s gcc-7 gcc
sudo rm g++
sudo ln -s g++-7 g++
4 Autoware.ai-1.14.0安装与编译
安装官网链接链接:
Autoware的GitLab 仓库
硬件支持:
首选 i7 处理器,i5 也可以 (8核)
16GB - 32GB 运行内存
至少 30GB 硬盘存储空间 (推荐使用固态硬盘)
显卡 NVIDIA GTX GeForce GPU (980M或更高性能)
笔者的安装流程如下:
3个方面入手学习:
(1) 编译安装,docker和源码
如果要源码编译,建议使用ubuntu18.04,doker编译,要有gpu编译,需要配匿doker-nvidia,配置过程参考htos://blog,sdn,net/gg_15409121/artidle/details/126384319
(2) ui界面的使用
(3)与carla联合仿真
4.1 源码的编译
官网安装教程:https://gitlab.com/autowarefoundation/autoware.ai/autoware/-/wikis/Source-Build
以下是笔者的安装流程:
建议使用Ubuntu18.04并安装好cuda
下载好源码,这里用1.14.0版本:
🔗1:GitHub
🔗2:autoware仓库
注意不要在conda里面运行
conda deactivate
step1: 下载解压进入目录执行
cd autoware-1.14.0
# 创建工作区
mkdir -p src
# 将Autoware.AI下载到工作区
vcs import src < autoware.ai.repos
报错如下: 部分连接超时
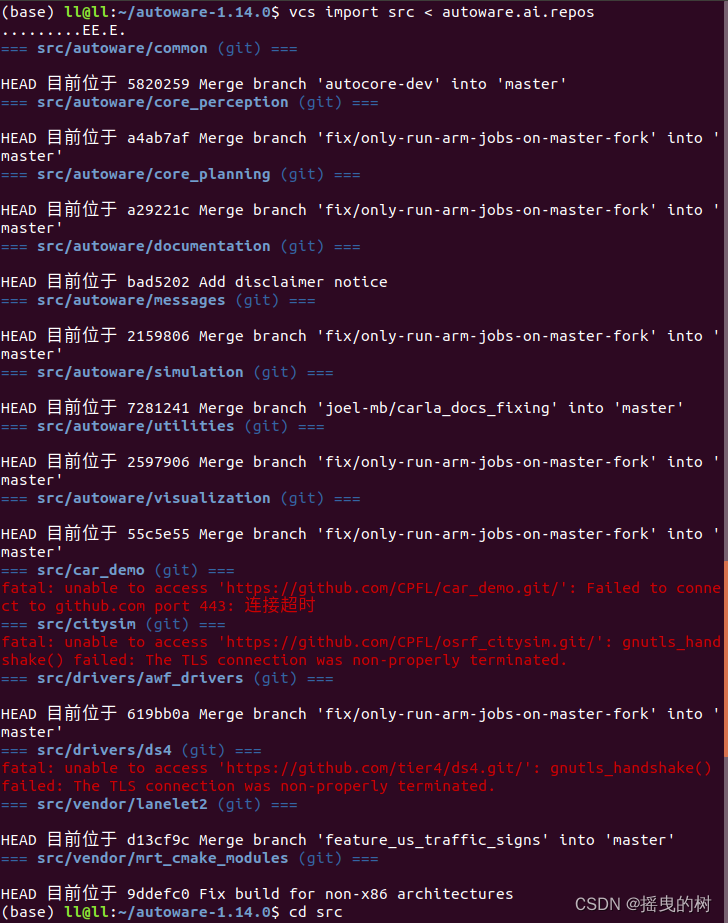
解决方法:
git config --global --unset https.https://github.com.proxy
git config --global --unset http.https://github.com.proxy
参考链接: https://blog.csdn.net/qq_31375855/article/details/121838533
成功运行,则显示如下:
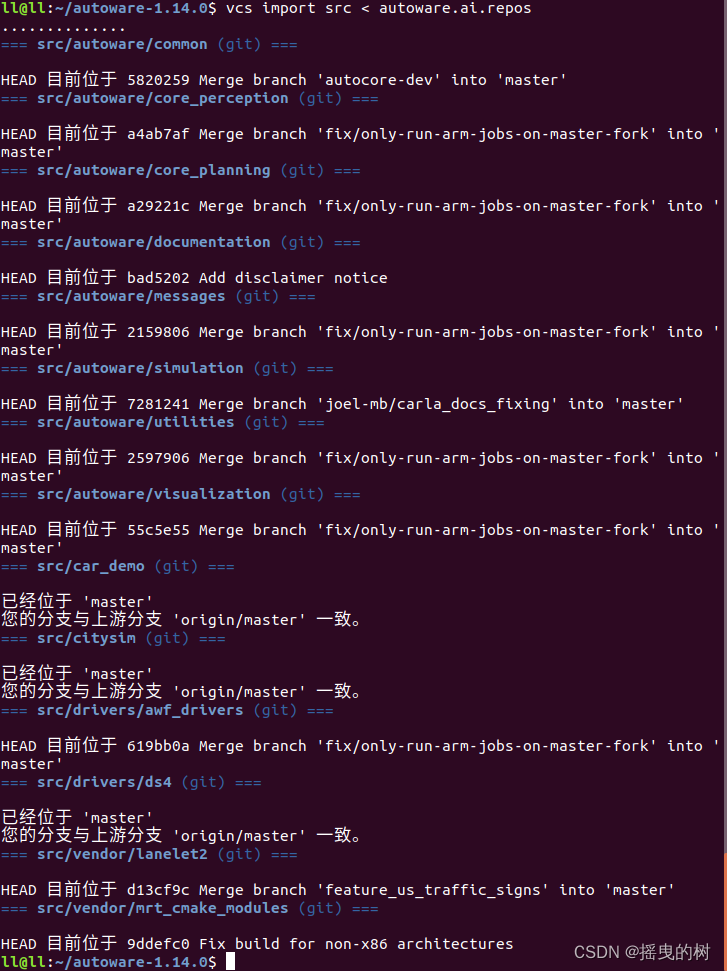
step2: 继续执行:
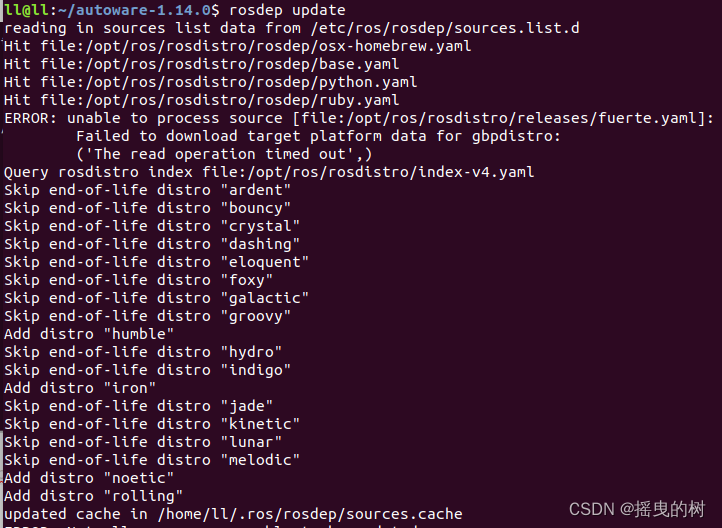
rosdep update
报错1:如果rosdep update报错:index-v4.yaml
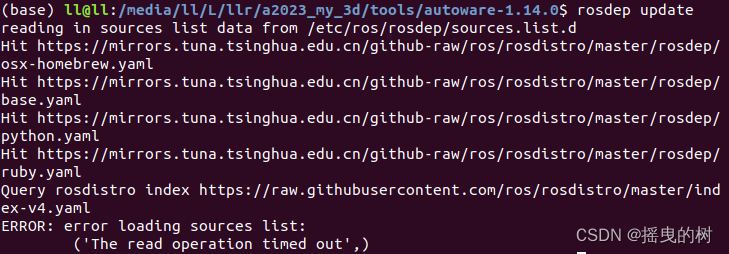
注意:先查看自己的ros版本,指令如下:
roscore
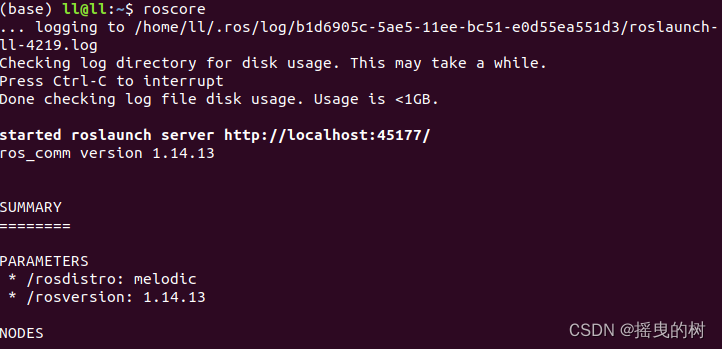
如笔者的ros版本是melodic,按照如下链接对报错进行修改:
index-v4.yaml文件解决:https://zhuanlan.zhihu.com/p/479551543
报错2:再次运行rosdep update报错如下:
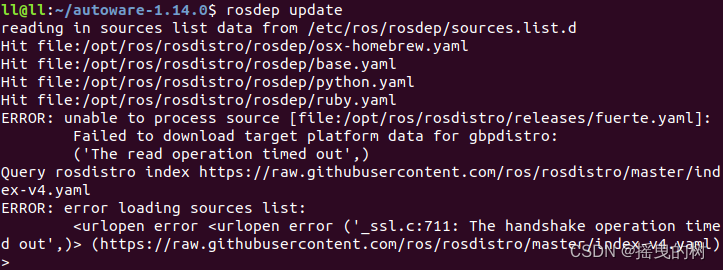
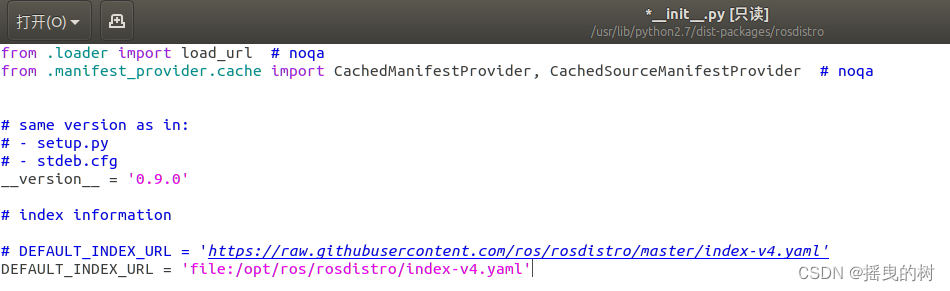
./python3/dist-packages/rosdistro/_init_.py文件内,将里面的语句
DEFAULT_INDEX_URL = ‘https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml’
改成:
DEFAULT_INDEX_URL = ‘file:/opt/ros/rosdistro/index-v4.yaml’
再rosdep update就ok了。
注意:文件位置因人而异,可以直接查找rosdistro文件夹所在位置
最后成功,显示如下:
step3: 继续执行:
# 官网指令
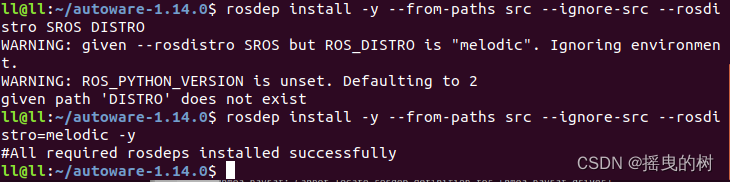
rosdep install -y --from-paths src --ignore-src --rosdistro SROS DISTRO
# 笔者成功运行指令,melodic是笔者安装的ros版本
rosdep install -y --from-paths src --ignore-src --rosdistro=melodic -y
报错如下:这是笔者按照官网教程执行出现的错误,若按照笔者上述流程应该不会有报错。
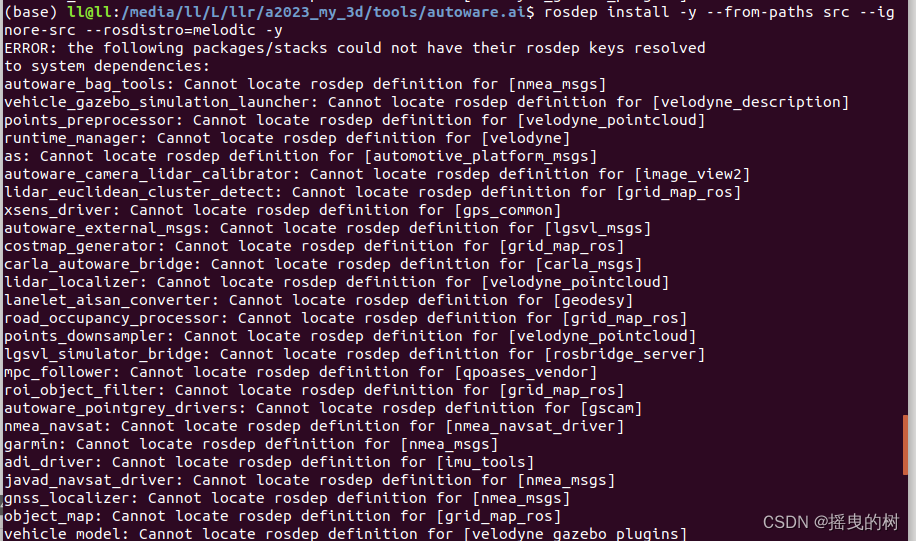
解决方法:
sudo apt-get install ros-melodic-nmea-msgs # ros-melodic+需要安装的依赖包(报错中[]的内容,并将下“_”改成“-”)
sudo apt-get install ros-melodic-image-view2
# 以此类推逐一下载,直到再次运行如下指令,并出现如图的结果
rosdep install -y --from-paths src --ignore-src --rosdistro=melodic -y
All required rosdeps installed successfully
代表此问题解决!
4.1.1 python2.7环境
先查看python2和python3的版本信息
python2 --version
which python2
python3 --version
which python3
查看当前系统的python版本
python --version
依次装载python2和python3
sudo update-alternatives --install /usr/bin/pthon python /usr/bin/python2 0
sudo update-alternatives --install /usr/bin/pthon python /usr/bin/python3 1
查看update-alternatives维护的python列表
sudo update-alternatives --list python
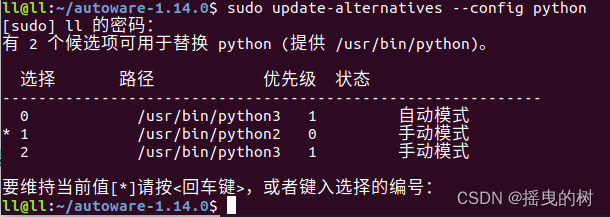
python2和python3相互切换
sudo update-alternatives --config python
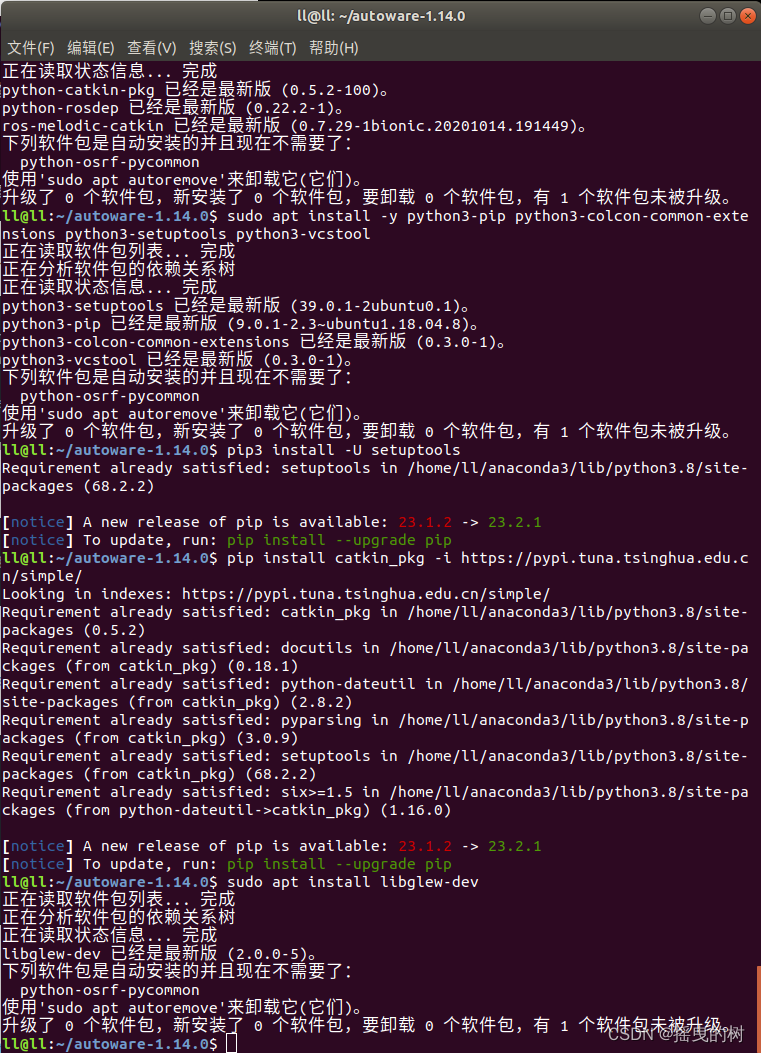
4.1,2 针对Ubuntu 18.04 / Melodic的依赖包安装
sudo apt update
sudo apt install -y python-catkin-pkg python-rosdep ros-$ROS_DISTRO-catkin
sudo apt install -y python3-pip python3-colcon-common-extensions python3-setuptools python3-vcstool
pip3 install -U setuptools
pip install catkin_pkg -i https://pypi.tuna.tsinghua.edu.cn/simple/
sudo apt install libglew-dev
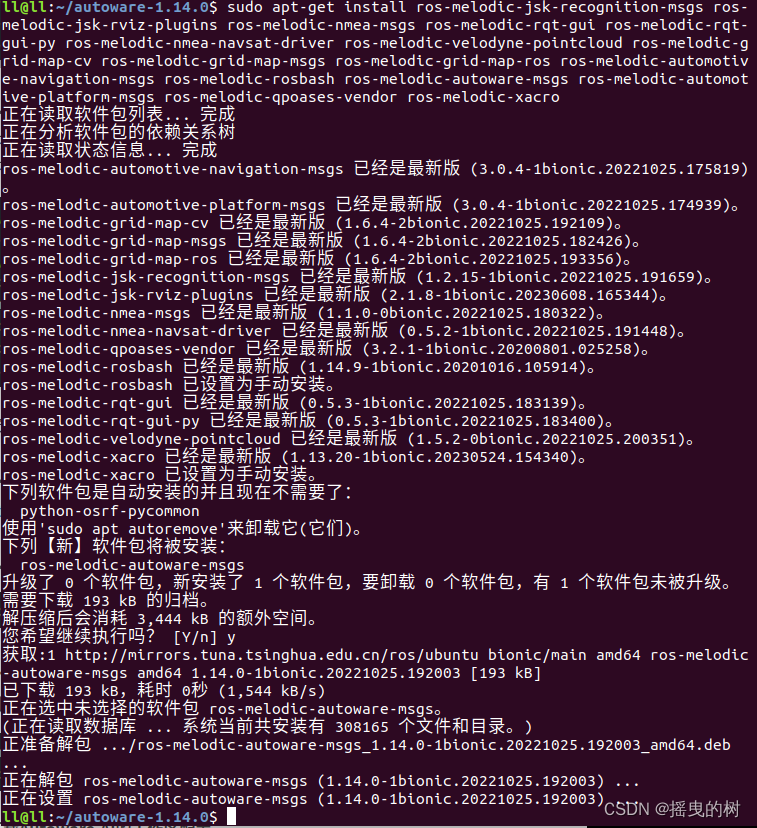
4.1.3 先安装一些缺的ros依赖
sudo apt-get update
sudo apt-get install ros-melodic-jsk-recognition-msgs ros-melodic-jsk-rviz-plugins ros-melodic-nmea-msgs ros-melodic-rqt-gui ros-melodic-rqt-gui-py ros-melodic-nmea-navsat-driver ros-melodic-velodyne-pointcloud ros-melodic-grid-map-cv ros-melodic-grid-map-msgs ros-melodic-grid-map-ros ros-melodic-automotive-navigation-msgs ros-melodic-rosbash ros-melodic-autoware-msgs ros-melodic-automotive-platform-msgs ros-melodic-qpoases-vendor ros-melodic-xacro
sudo apt-get install ros-melodic-controller-manager ros-melodic-robot-state-publisher ros-melodic-joint-state-controller ros-melodic-gps-common ros-melodic-geodesy
4.1.4 安装eigen3.3.7
下载链接:https://gitlab.com/libeigen/eigen/-/releases/3.3.7

下载完成后,在压缩包所在目录打开终端
//解压
sudo tar -xzvf eigen-3.3.7.tar.gz
//安装
cd eigen-3.3.7
mkdir build
cd build
cmake ..
sudo make install
安装后头文件安装在/usr/local/include/eigen3/
4.1.5 安装opencv 3.4.16
https://blog.csdn.net/qq_58879770/article/details/127037125
4.1.6 编译
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
4.1.7 运行
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
4.2 Docker Autoware环境搭建
创建工作空间
mkdir -p autoware.ai/src
cd autoware.ai
下载Autoware.AI的工作区配置
wget -O autoware.ai.repos "https://gitlab.com/autowarefoundation/autoware.ai/autoware/raw/master/autoware.ai.repos?inline=false"
vcs import src < autoware.ai.repos
使用rosdep安装依赖项
rosdep update
报错1:ROS rosdep update更新失败

解决方法:
sudo pip install rosdepc
sudo rosdepc init
rosdepc update
再下载依赖
# rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
rosdep install -y --from-paths src --ignore-src --rosdistro=melodic -y
执行成功则显示如下:

使用CUDA支持编译工作空间
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
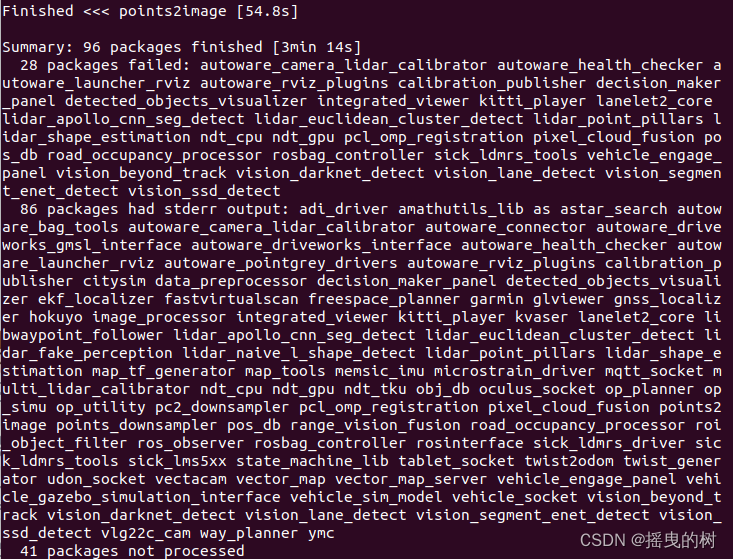
报错如下

但是在部分报错的包一般是不会用到的,可以在指令后面加入参数【–continue-on-error】忽略报错,到在后面的应用时有需要再添加。
重新执行指令如下:
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --continue-on-error
4.3 运行 Autoware
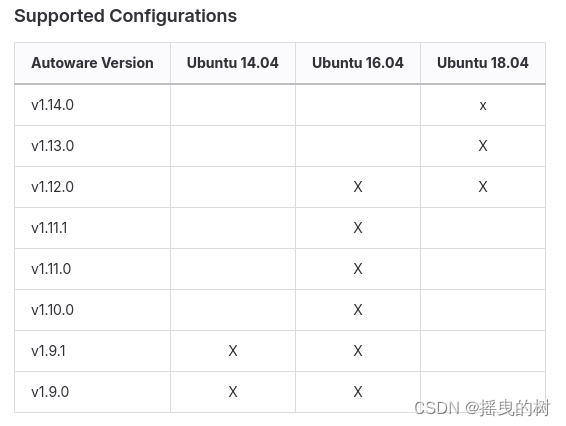
For Autoware version 1.12.0 and Newer
更早的版本运行指令详见ROSBAG Demo
cd ./autoware.ai
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
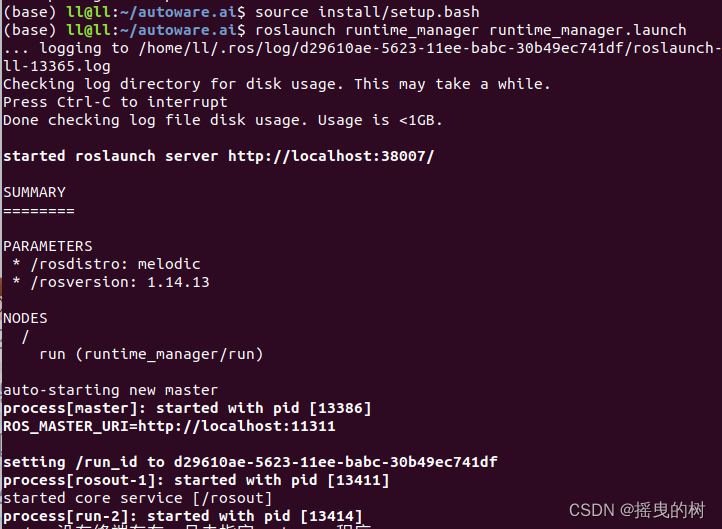
又启动一个Autoware的终端如下:
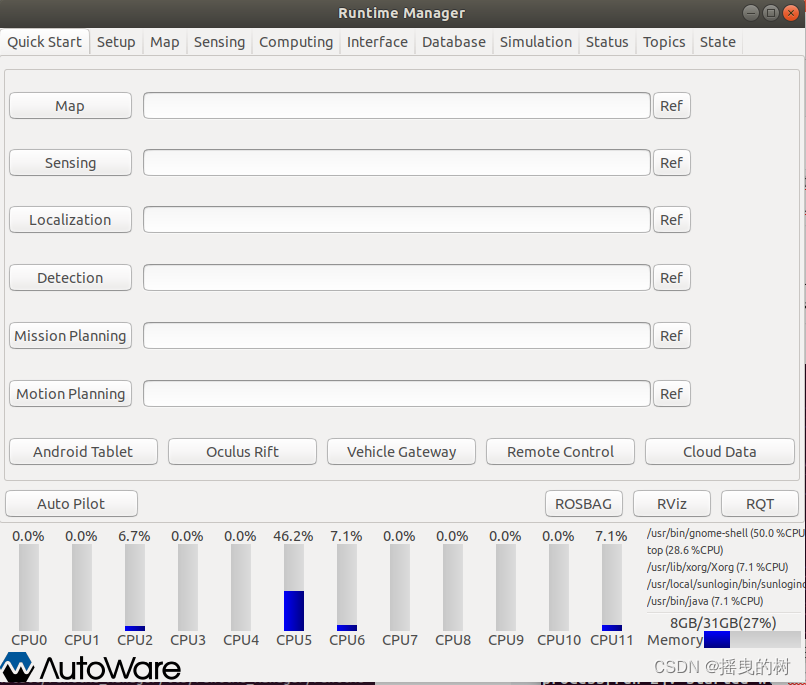
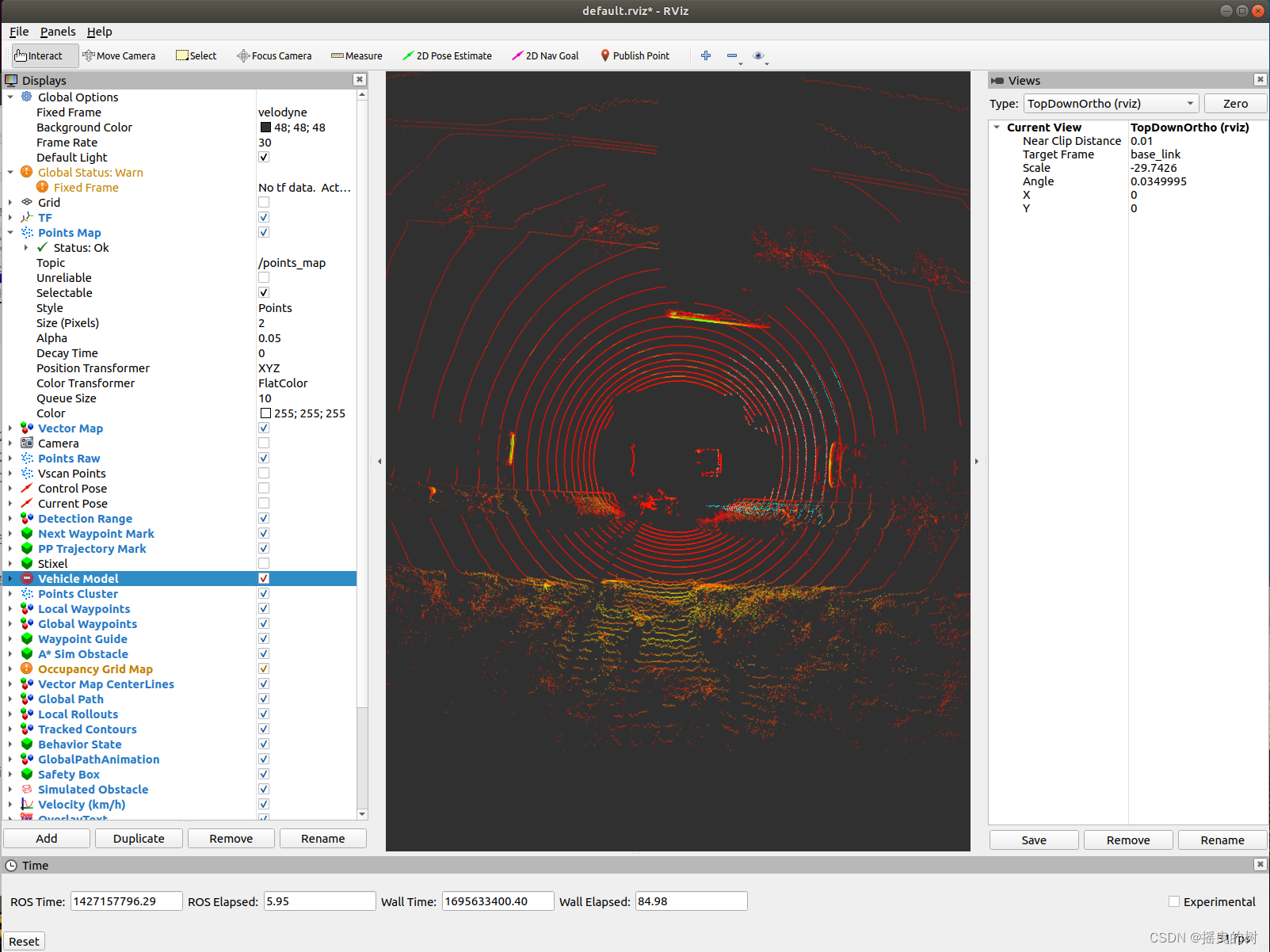
Autoware的界面如下:
参考链接:
链接1:Autoware 安装(源码)过程 与 踩坑记录(Ubuntu18.04)
链接2:NVIDIA Jetson Nano主机的autoware的学习与demo运行-第7章-Autoware源码安装
链接3:【Autoware】2小时安装Autoware1.13(保姆级教程)
4.4 ROSBAG Demo
官网链接:ROSBAG Demo
相关文章:
【Ubuntu18.04】Autoware.ai安装
Autoware.ai安装 引言1 ROS安装2 Ubuntu18.04安装Qt5.14.23 安装GCC、G4 Autoware.ai-1.14.0安装与编译4.1 源码的编译4.1.1 python2.7环境4.1,2 针对Ubuntu 18.04 / Melodic的依赖包安装4.1.3 先安装一些缺的ros依赖4.1.4 安装eigen3.3.74.1.5 安装opencv 3.4.164.1.6 编译4.1…...

SpringMVC 学习(一)Servlet
本系列文章为【狂神说 Java 】视频的课堂笔记,若有需要可配套视频学习。 1. Hello Servlet (1) 创建父工程 删除src文件夹 引入一些基本的依赖 <!--依赖--> <dependencies><dependency><groupId>junit</groupId><artifactId>…...
26943-2011 升降式高杆照明装置 课堂随笔
声明 本文是学习GB-T 26943-2011 升降式高杆照明装置. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们 1 范围 本标准规定了升降式高杆照明装置的技术要求、试验方法、检验规则以及标志、包装、运输及贮 存等。 本标准适用于公路、广场、机场、港口、…...

洛谷题解 | AT_abc321_c Primes on Interval
目录 题目翻译题目描述输入格式输出格式样例 #1样例输入 #1样例输出 #1 样例 #2样例输入 #2样例输出 #2 样例 #3样例输入 #3样例输出 #3 题目简化题目思路AC代码 题目翻译 【题目描述】 你决定用素数定理来做一个调查. 众所周知, 素数又被称为质数,其含义就是除了数…...
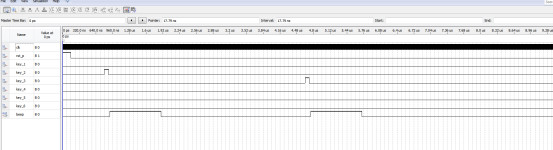
Quartus医院病房呼叫系统病床呼叫Verilog,源代码下载
名称:医院病房呼叫系统病床呼叫 软件:Quartus 语言:Verilog 要求: 1、用1~6个开关模拟6个病房的呼叫输入信号,1号优先级最高;1~6优先级依次降低; 2、 用一个数码管显示呼叫信号的号码;没信号呼叫时显示0;有多个信号呼叫时,显…...
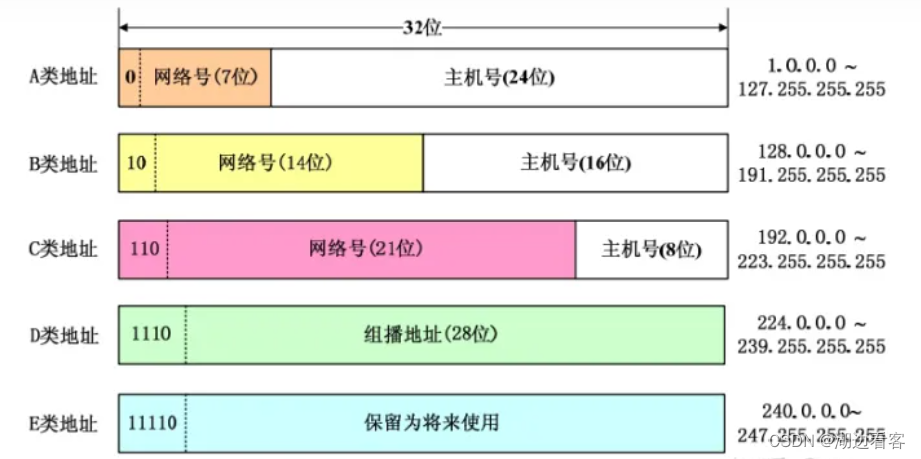
ip的标准分类---分类的Ip
分类的 IP 即将 IP 地址划分为若干个固定类,每一类地址都由两个固定长度的字段组成。 其中第一个字段是网络号(net-id),它标志主机或路由器所连接的网络。一个网络号在整个因特网内必须是唯一的。 第二个字段是主机号…...
)
理解并掌握C#的Channel:从使用案例到源码解读(一)
引言 在C#的并发编程中,Channel是一种非常强大的数据结构,用于在生产者和消费者之间进行通信。本文将首先通过一个实际的使用案例,介绍如何在C#中使用Channel,然后深入到Channel的源码中,解析其内部的实现机制。 使用案…...

如何让git命令仅针对当前目录
背景 我们有时候建的git仓库是这样的,a目录下有b、c、d三个模块(文件夹)。有时候只想查看b下面的变化,而使用 git status、git diff 的时候会把c和d的变化都列出来,要怎么只查b目录的变化? 操作 要查b目…...

【0223】源码剖析smgr底层设计机制(3)
1. smgr设计机制 PG内核中smgr完整磁盘存储介质的管理是通过下面三部分实现的。 1.1 函数指针结构体 f_smgr 函数指针结构体 f_smgr。 通过该函数指针类型,可完成类似于UNIX系统中的VFD功能,上层只需要调用open()、read()、write()等系统函数,用户不必去关系底层的文件系统…...

Visual Studio 2019 C# winform CefSharp 中播放视频及全屏播放
VS C# winform CefSharp 浏览器控件,默认不支持视频播放,好在有大佬魔改了dll,支持流媒体视频播放。虽然找了很久,好歹还是找到了一个版本100.0.230的dll(资源放在文末) 首先创建一个项目 第二、引入CefSha…...

天选之子Linux是如何发展起来的?为何对全球IT行业的影响如此之大?
天选之子Linux是如何发展起来的?为何对全球IT行业的影响如此之大? 前言一、UNIX发展史二、Linux发展历史三、开源四、官网五、 企业应用现状六、发行版本 前言 上面这副图是博主历时半小时完成的,给出了Linxu的一些发展背景。球球给位看官老…...
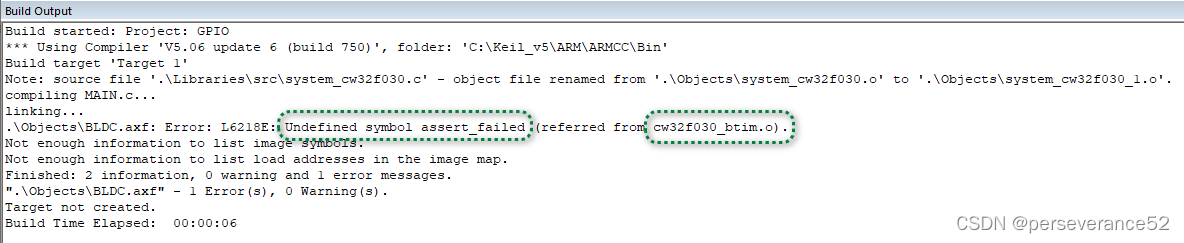
MDK报错:Undefined symbol assert_failed报错解决策略
MDK报错:Undefined symbol assert_failed报错解决策略 🎯🪕在全网搜索相关MDK编译报错:Error: L6218E: Undefined symbol assert_param (referred from xxx.o). ✨有些问题看似很简单,可能产生的问题是由于不经意的细节原因导致。…...
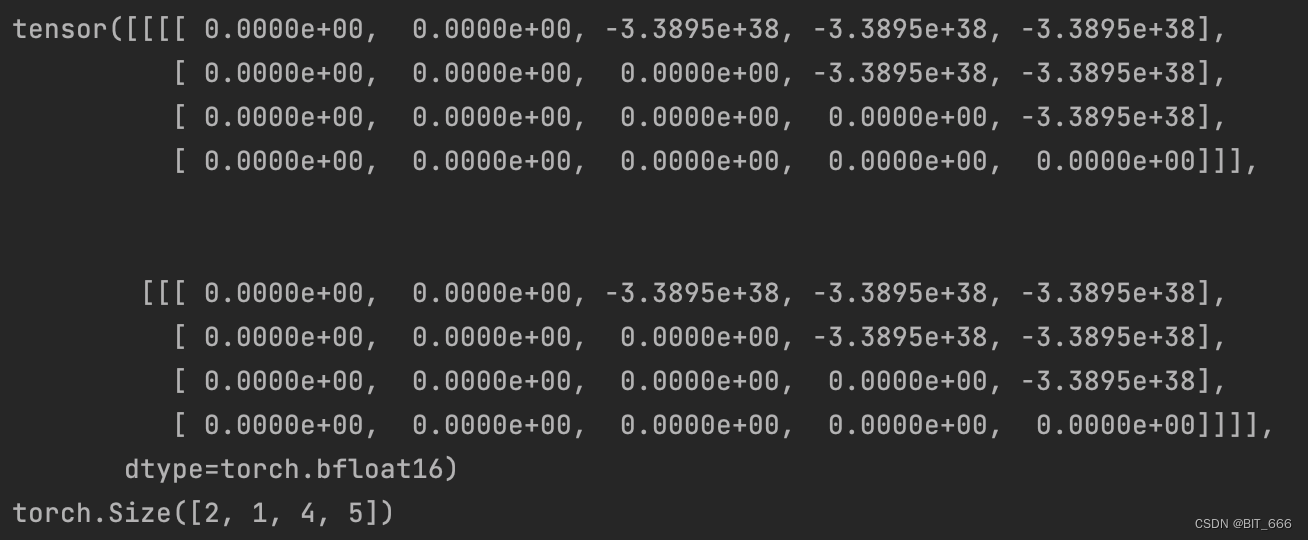
LLM - Make Causal Mask 构造因果关系掩码
目录 一.引言 二.make_causal_mask 1.完整代码 2.Torch.full 3.torch.view 4.torch.masked_fill_ 5.past_key_values_length 6.Test Main 三.总结 一.引言 Causal Mask 主要用于限定模型的可视范围,防止模型看到未来的数据。在具体应用中,Caus…...
概念和itertools)
Python函数式编程(一)概念和itertools
Python函数式编程是一种编程范式,它强调使用纯函数来处理数据。函数是程序的基本构建块,并且尽可能避免或最小化可变状态和副作用。在函数式编程中,函数被视为一等公民,可以像值一样传递和存储。 函数式编程概念 编程语言支持通…...
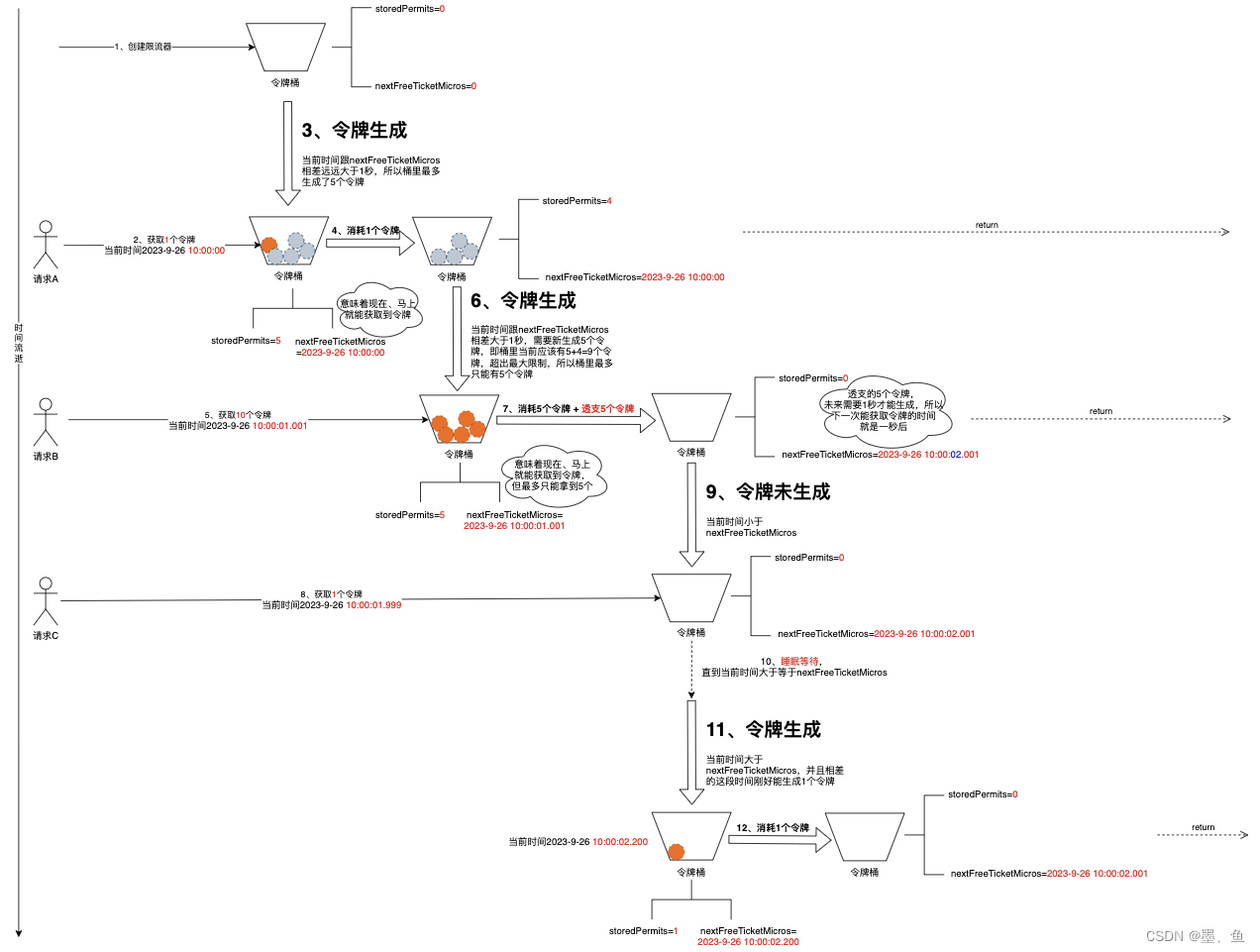
Guava限流器原理浅析
文章目录 基本知识限流器的类图使用示例 原理解析限流整体流程问题驱动1、限流器创建的时候会初始化令牌吗?2、令牌是如何放到桶里的?3、如果要获取的令牌数大于桶里的令牌数会怎么样4、令牌数量的更新会有并发问题吗 总结 实际工作中难免有限流的场景。…...

第四十二章 持久对象和SQL - 用于创建持久类和表的选项
文章目录 第四十二章 持久对象和SQL - 用于创建持久类和表的选项用于创建持久类和表的选项访问数据 第四十二章 持久对象和SQL - 用于创建持久类和表的选项 用于创建持久类和表的选项 要创建持久类及其对应的 SQL 表,可以执行以下任一操作: 使用 IDE …...
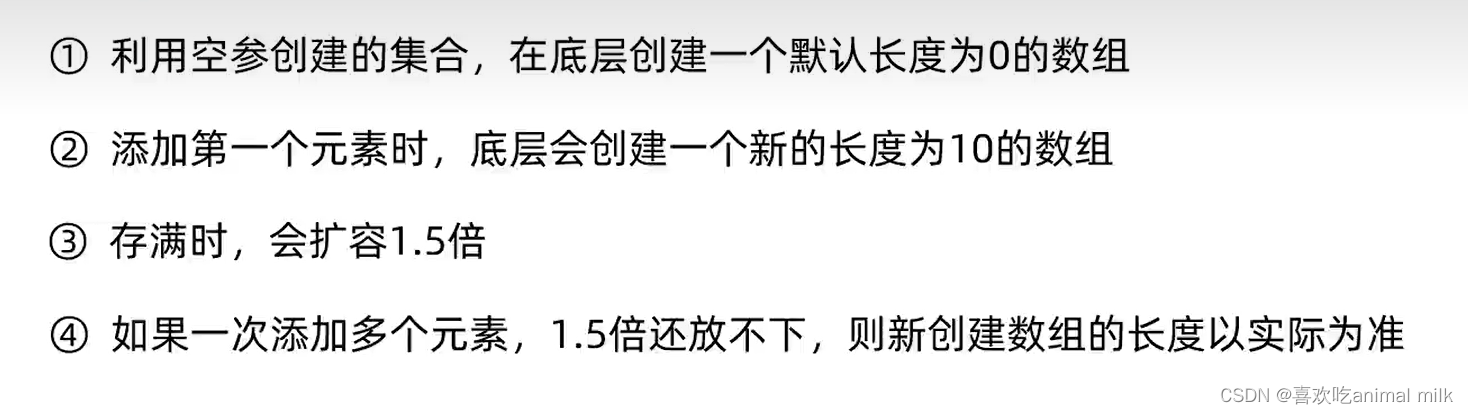
集合-ArrayList源码分析(面试)
系列文章目录 1.集合-Collection-CSDN博客 2.集合-List集合-CSDN博客 3.集合-ArrayList源码分析(面试)_喜欢吃animal milk的博客-CSDN博客 目录 系列文章目录 前言 一 . 什么是ArrayList? 二 . ArrayList集合底层原理 总结 前言 大家好,今天给大家讲一下Arra…...
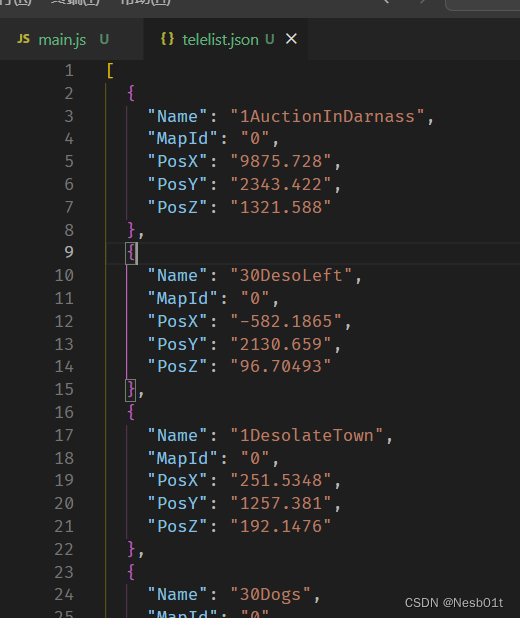
跨类型文本文件,反序列化与类型转换的思考
文章目录 应用场景序列化 - 对象替换原内容,方便使用编写程序取得结果数组 序列化 - JSON 应用场景 在编写热更新的时候,我发现了一个古早的 ini 文件,记录了许多有用的数据 由于使用的语言年份较新,没有办法较好地对 ini 文件的…...
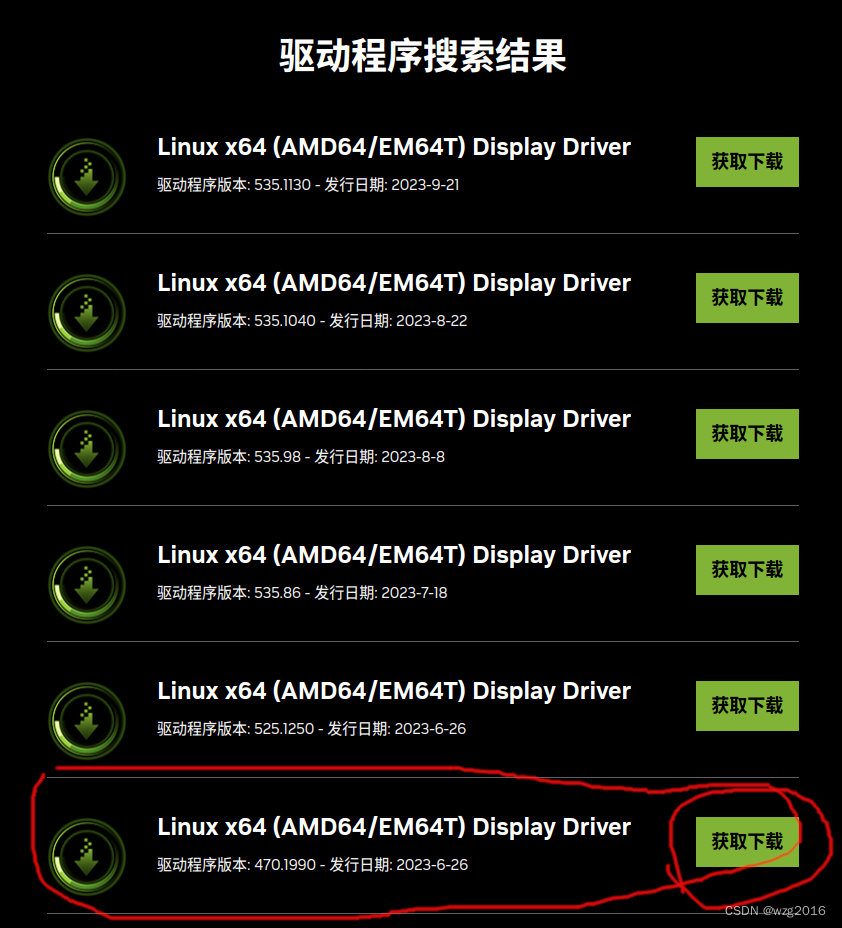
ubuntu20安装nvidia驱动
1. 查看显卡型号 lspci | grep -i nvidia 我的输出: 01:00.0 VGA compatible controller: NVIDIA Corporation GP104 [GeForce GTX 1080] (rev a1) 01:00.1 Audio device: NVIDIA Corporation GP104 High Definition Audio Controller (rev a1) 07:00.0 VGA comp…...
gma 2 成书计划
随着 gma 2 整体构建完成。下一步计划针对库内所有功能完成一个用户指南(非网站)。 封皮 主要章节 章节完成度相关链接第 1 章 GMA 概述已完成第 2 章 地理空间数据操作已完成第 3 章 坐标参考系统已完成第 4 章 地理空间制图已完成第 5 章 数学运算模…...

在Docker环境中安装Hadoop cluster 实验报告三
在Docker环境中安装Hadoop cluster 实验报告三 1个namenode, 3个datanodes 班 级:物联网2303 学 号:231040700302 姓 名:杜子健 (30%) 安装过程 ContainersHadoop 1.1 Containers 创建与配置 (1)拉取稳定镜像…...

AI编程助手与代码质量守护:Trunk Cursor插件实战指南
1. 项目概述:当AI编程助手遇上代码质量守护者如果你和我一样,日常重度依赖Cursor这类AI编程助手来加速开发,那么你一定也遇到过类似的困扰:AI生成的代码片段虽然功能上“能用”,但在代码风格、格式一致性、甚至是潜在的…...

声明式数据转换利器:Refiner 实战指南与架构集成
1. 项目概述与核心价值最近在折腾一个老项目的数据清洗和转换,被一堆格式混乱、结构不一的JSON文件搞得焦头烂额。手动写脚本处理吧,每次需求一变就得重写,维护成本太高;用现成的ETL工具吧,又觉得过于笨重,…...

企业AI成本为什么总是失控?Token计量与费用归因体系设计
一、问题背景随着企业大规模接入大模型能力,一个普遍现象正在浮现:AI成本正在失控。月初预算批了10万,月底账单来了20万。问财务:钱花哪了?财务说:只知道总额,不知道细节。问IT:哪个…...

实战复盘:我是如何通过一个SSRF漏洞,利用Gopher协议拿下内网Redis的
从SSRF到内网Redis入侵:一次真实渗透测试的深度剖析 那天下午,我正在对某企业Web应用进行常规安全评估。一个看似普通的文件下载接口引起了我的注意——它接受URL参数并返回对应资源内容。直觉告诉我,这里可能存在SSRF漏洞。接下来的72小时&a…...

TI INA333数据手册没细说的5个细节:增益电阻怎么选?温漂怎么算?你的电路可能一直没优化
INA333电路设计进阶指南:数据手册没告诉你的5个关键优化点 在精密测量电路设计中,INA333作为TI经典的仪表放大器,被广泛应用于传感器信号调理、医疗设备和工业控制等领域。虽然数据手册提供了基本参数和典型应用电路,但许多工程师…...

ARM架构TLB失效指令VALE1IS/VALE1ISNXS详解
1. ARM TLB失效指令基础解析在ARMv8/v9架构中,TLB(Translation Lookaside Buffer)作为内存管理单元(MMU)的核心组件,缓存了虚拟地址到物理地址的转换结果。当操作系统修改页表后,必须通过TLB失效…...

Doramagic:AI助手开源项目专家技能提取引擎架构与实战
1. 项目概述:Doramagic,一个为AI助手注入项目“灵魂”的提取引擎如果你和我一样,每天都在和各种各样的开源项目打交道,从FastAPI到Home Assistant,从Next.js到LangChain,那你肯定也遇到过这样的困境&#x…...

从ST-Ericsson案例剖析半导体合资企业的战略困境与生存法则
1. 从一篇旧文看半导体合资企业的生存逻辑最近在整理行业历史资料时,翻到了一篇2011年发布于EE Times的文章,标题是《ST-Ericsson还能撑多久?》。这篇文章像一枚时间胶囊,精准地记录了一家曾经备受瞩目的无线芯片合资公司在特定时…...
)
PS2021神经滤镜离线包保姆级安装指南(附文件夹显示与路径详解)
PS2021神经滤镜离线包安装全流程实战手册 第一次打开Photoshop 2021的神经滤镜功能时,那个漫长的下载进度条简直让人崩溃。特别是当网络环境不稳定时,下载失败的概率直线上升。其实Adobe官方提供了完整的离线安装方案,只是隐藏得比较深——就…...