SLAM从入门到精通(gmapping建图)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
前面我们介绍了hector slam建图。相对而言,hector slam建图对数据的要求比较低,只需要lidar数据就可以建图了。但是hector slam也有它自己的问题。那就是如果robot行走在走廊上面,特别是长走廊上面,那么hector slam是很难建图的。这主要的原因就是,hector slam算法会觉得前后两帧lidar frame没有发生改变,小车根本没有移动。基于这个原因,人们又设计出了一种新的制图方法,那就是gmapping制图。和hector slam相比较,gmapping还依赖于robot的里程计数据。
1、打开仿真地图
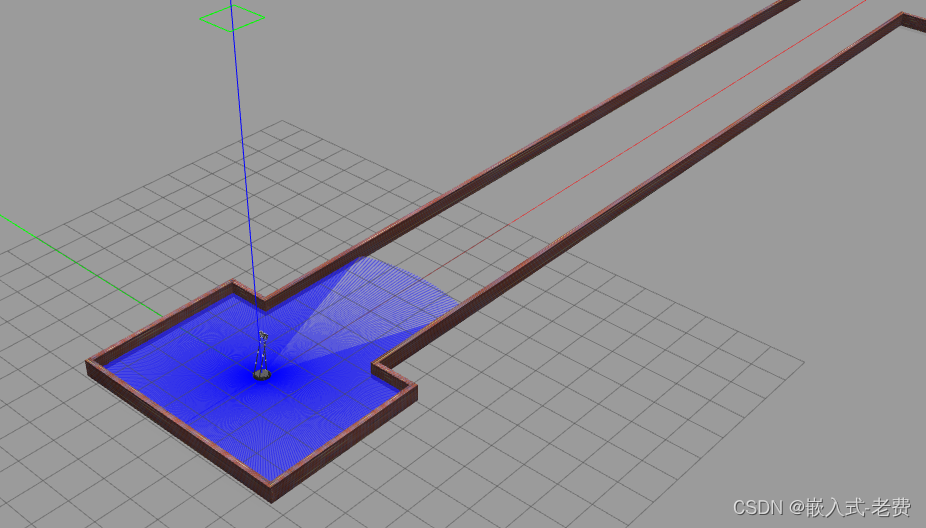
和之前打开wpb_stage_slam.launch不同,这一次打开的wpb_stage_corridor.launch。用roslaunch wpr_simulation wpb_stage_corridor.launch打开,效果是这样的,
2、开启gmapping
仿真环境准备好了,这个时候就可以准备用gmapping开始绘图了。输入的方法就是rosrun gmapping slam_gmapping即可。不出意外的话,可以看到这样的打印,
feixiaoxing@feixiaoxing-VirtualBox:~/Desktop/catkin_ws$ rosrun gmapping slam_gmapping
Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame odom at time 137.641000 according to authority unknown_publisherat line 278 in /tmp/binarydeb/ros-noetic-tf2-0.7.6/src/buffer_core.cpp
[ INFO] [1696080880.129716402, 137.739000000]: Laser is mounted upwards.-maxUrange 5.99 -maxUrange 5.99 -sigma 0.05 -kernelSize 1 -lstep 0.05 -lobsGain 3 -astep 0.05-srr 0.1 -srt 0.2 -str 0.1 -stt 0.2-linearUpdate 1 -angularUpdate 0.5 -resampleThreshold 0.5-xmin -100 -xmax 100 -ymin -100 -ymax 100 -delta 0.05 -particles 30
[ INFO] [1696080880.212790260, 137.789000000]: Initialization complete
update frame 0
update ld=0 ad=0
Laser Pose= 1.7082e-07 1.78246e-07 3.20824e-08
m_count 0
Registering First Scan
3、用rviz开启绘图效果
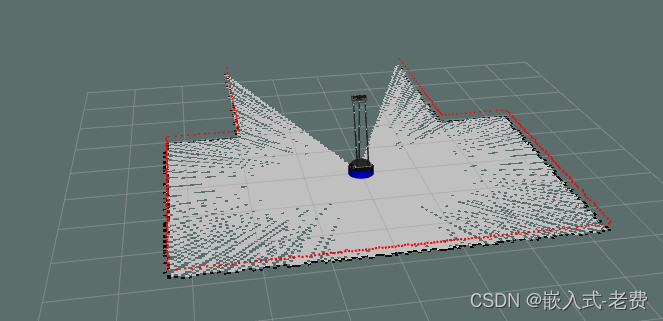
直接执行rosrun rviz rviz,依次打开RobotModel、Map、LaserScan之后,我们就可以看到这样的效果,
4、继续打开rqt_robot_steering
这个时候虽然已经看到图形了,但是车还没有办法动起来。所以,这个时候,我们还需要用rosrun rqt_robot_steering rqt_robot_steering把小车启动起来。这样一顿操作之后,就可以把所有的场景绘制完毕了。如果仅仅使用hector slam,这个时候就没有什么办法继续绘图了,
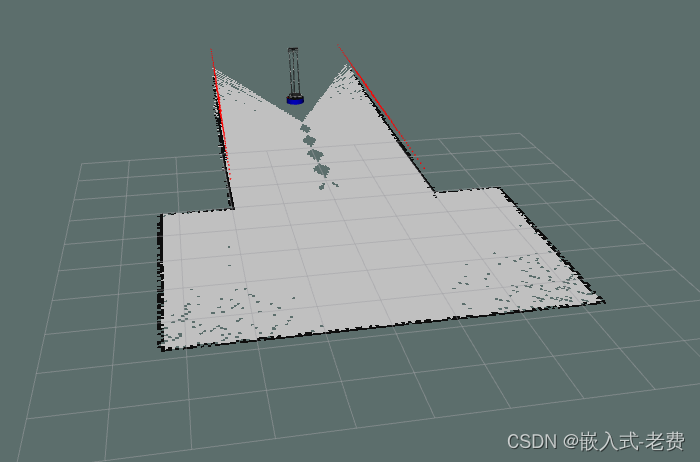
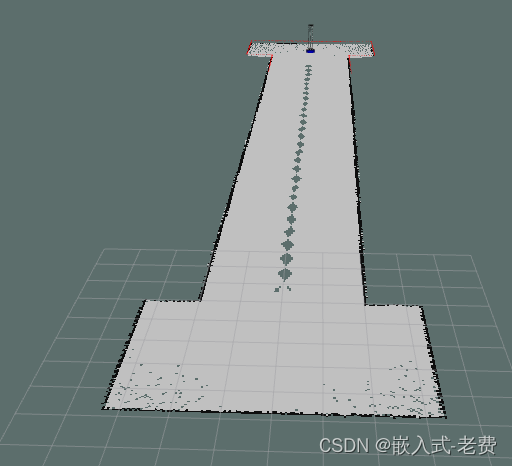
但是,此时我们使用的是gmapping的建图方法,所以小车可以一直向前建图下去,
5、保存和显示地图
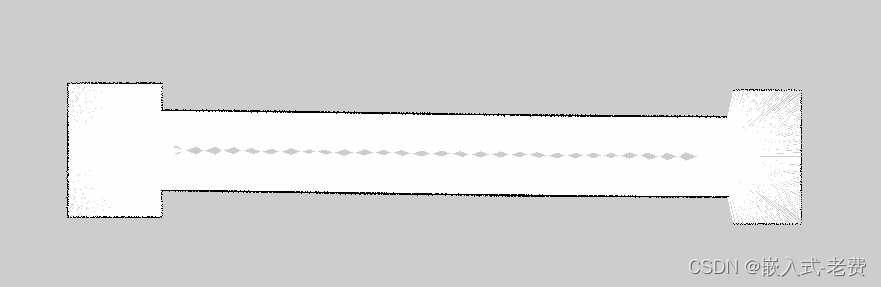
等地图做好了,就可以使用map_server保存地图了。直接输入rosrun map_server map_saver。ls一下,就可以看到map.yaml和map.pgm两个新文件。把map.pgm拷贝到windows平台,用gimp打开,就可以看到这样的图片效果,
相关文章:
SLAM从入门到精通(gmapping建图)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 前面我们介绍了hector slam建图。相对而言,hector slam建图对数据的要求比较低,只需要lidar数据就可以建图了。但是hector …...
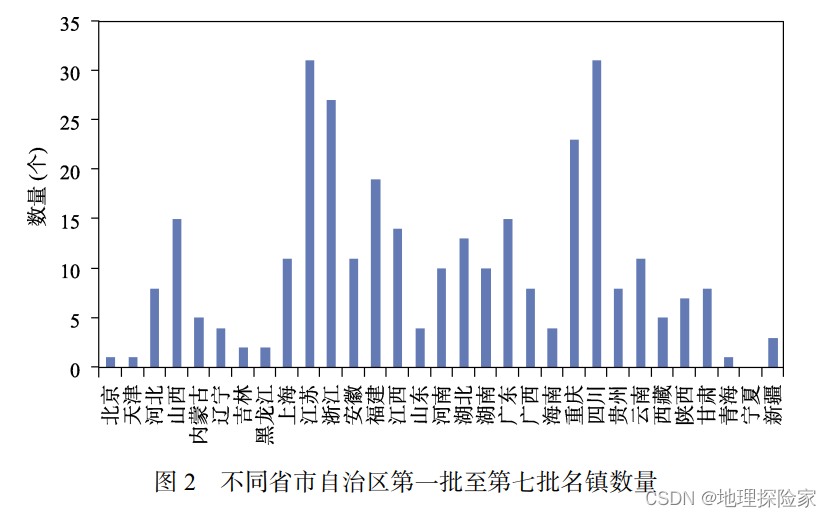
中国312个历史文化名镇及景区空间点位数据集
一部中华史,既是人类创造丰富物质财富的奋头史,又是与自然共生共存的和谐史不仅留存下悠久丰富的人文思想和情怀,还在各处镌刻下可流传的生活场景,历史文化名镇(以下简称:名镇)就是这样真实的历史画卷。“镇”是一方的政治文化中心…...

记一次Mybatis驼峰命名导致的线上BUG及处理方案
前言 方向从一开始就错了,还是执着的去寻找问题的解决方案,简直就是一场重大灾难,但这也是每个修行者的必由之路。这个线上问题,差点让我的心里防线崩溃,苦寻无门,最终得以解决也多亏了身边的各路大佬的群…...

在MyBatisPlus中添加分页插件
开发过程中,数据量大的时候,查询效率会有所下降,这时,我们往往会使用分页。 具体操作入下: 1、添加分页插件: package com.zhang.config;import com.baomidou.mybatisplus.extension.plugins.Pagination…...

算法题系列8·买卖股票的最佳时机
目录 题目描述 实现 提交结果 题目描述 给定一个数组 prices ,它的第 i 个元素 prices[i] 表示一支给定股票第 i 天的价格。 你只能选择 某一天 买入这只股票,并选择在 未来的某一个不同的日子 卖出该股票。 设计一个算法来计算你所能获取的最大利润。…...

DC电源模块关于宽电压输入和输出的范围
BOSHIDA DC电源模块关于宽电压输入和输出的范围 DC电源模块是一种电子设备,能够将输入的直流电源转换成所需的输出电源,用于供电各种电子设备。其中,关于宽电压输入和输出的范围,是DC电源模块常见的设计要求之一。本文将详细介绍…...

【Docker】docker拉取镜像错误 missing signature key
问题 当我使用docker拉取一个特定的镜像时,提示错误: 错误 missing signature key 但是拉取其他镜像又可以访问,,,,于是,我怀疑是否是docker版本问题。 docker --version结果确实࿰…...

C- 静态链接
静态链接意味着在编译时将所有库函数直接嵌入到最终的可执行文件中,而不是在运行时通过共享库来动态链接这些函数。静态链接的结果是一个更大的可执行文件,因为它包含了所有必要的代码,但它可以在没有外部依赖的情况下独立运行。 下面是一个…...

微信公众号开发(BUG集)
1.微信公众平台接口错误:不合法的自定义菜单使用用户 地址:解决地址 2.微信公众平台接口错误:invalid ip 180.101.72.196 ipv6 ::ffff:180.101.72.196, not in whitelist rid: 6511420b-60c59249-01084d02 白名单离开放服务器IP...
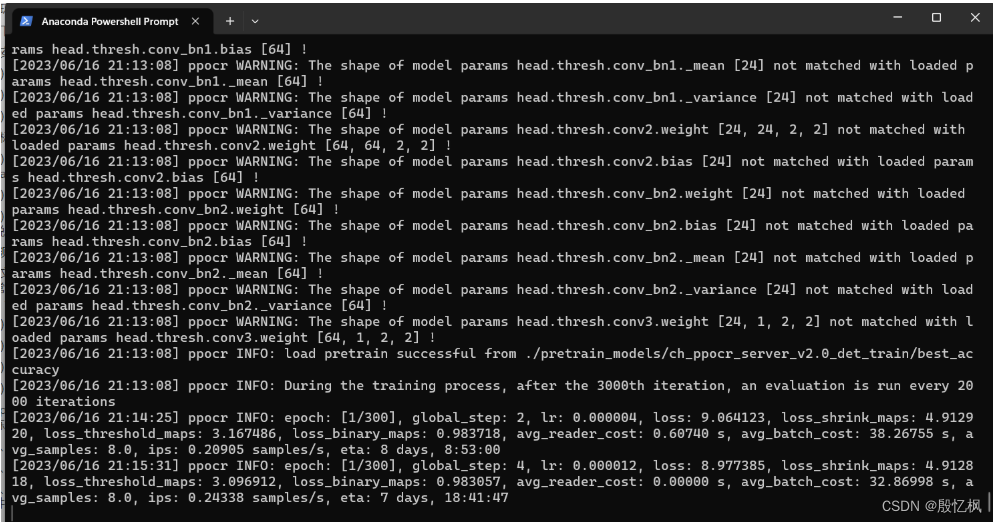
AI项目十三:PaddleOCR训练自定义数据集
若该文为原创文章,转载请注明原文出处。 续上一篇,PaddleOCR环境搭建好了,并测试通过,接下来训练自己的检测模型和识别模型。 paddleocr检测模型训练 1、准备数据集 在PaddleOCR目录下新建文件夹:train_data, 这个…...
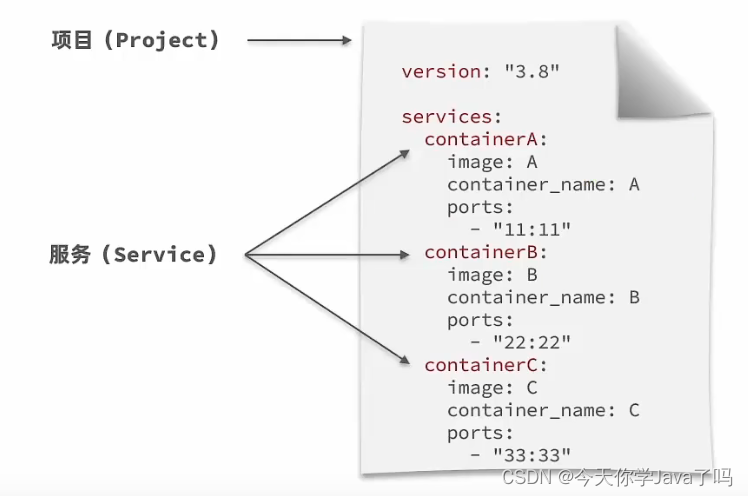
你熟悉Docker吗?
你熟悉Docker吗? 文章目录 你熟悉Docker吗?快速入门Docker安装1.卸载旧版2.配置Docker的yum库3.安装Docker4.启动和校验5.配置镜像加速5.1.注册阿里云账号5.2.开通镜像服务5.3.配置镜像加速 部署MySQL镜像和容器命令解读 Docker基础常用命令数据卷数据卷…...

Nodejs错误处理详细指南
Nodejs错误处理详细指南 学习 Node.js 中的高级错误处理技术,以增强应用程序的可靠性和稳定性。 在 Node.js 中,我们可以使用各种技术和方法来处理错误,可以查看这篇文章。错误处理是任何 Node.js 应用程序的一个重要方面。正确管理错误可以…...

软考 系统架构设计师系列知识点之软件架构风格
这个十一注定是一个不能放松、保持“紧”的十一。由于报名了全国计算机技术与软件专业技术资格(水平)考试,11月4号就要考试,因此8天长假绝不能荒废,必须要好好利用起来。现在将各个核心知识点一一进行提炼并做记录。 所…...
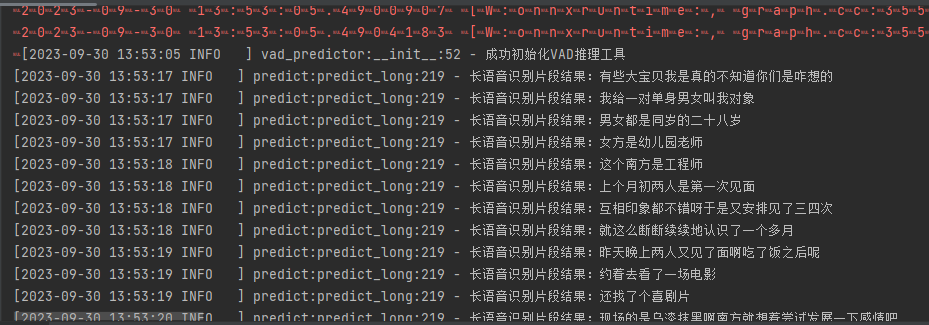
一键智能视频语音转文本——基于PaddlePaddle语音识别与Python轻松提取视频语音并生成文案
前言 如今进行入自媒体行业的人越来越多,短视频也逐渐成为了主流,但好多时候是想如何把视频里面的语音转成文字,比如,录制会议视频后,做会议纪要;比如,网课教程视频,想要做笔记&…...

[unity]对象的序列化
序 抽象的图纸叫类,包含具体数据的叫对象。 类的序列化和反序列化 using System.Collections; using System.Collections.Generic; using UnityEngine;using System; using System.IO; using System.Runtime.Serialization.Formatters.Binary; [Serializabl…...

java开发岗位面试
java开发岗位面试 技术栈:springboot框架+redis 个人笔试/技术面问题整理 1、SpringBoot有什么组件? 举例说几个: ①auto-configuration组件:核心特征。其约定大于配置思想,赋予了SpringBoot开箱即用的强…...

坠落防护 挂点装置
声明 本文是学习GB 30862-2014 坠落防护 挂点装置. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们 1 范围 本标准规定了高处坠落防护挂点装置的技术要求、检验方法、检验规则及标识。 本标准适用于防护高处坠落的挂点装置。 本标准不适用于体育及消…...
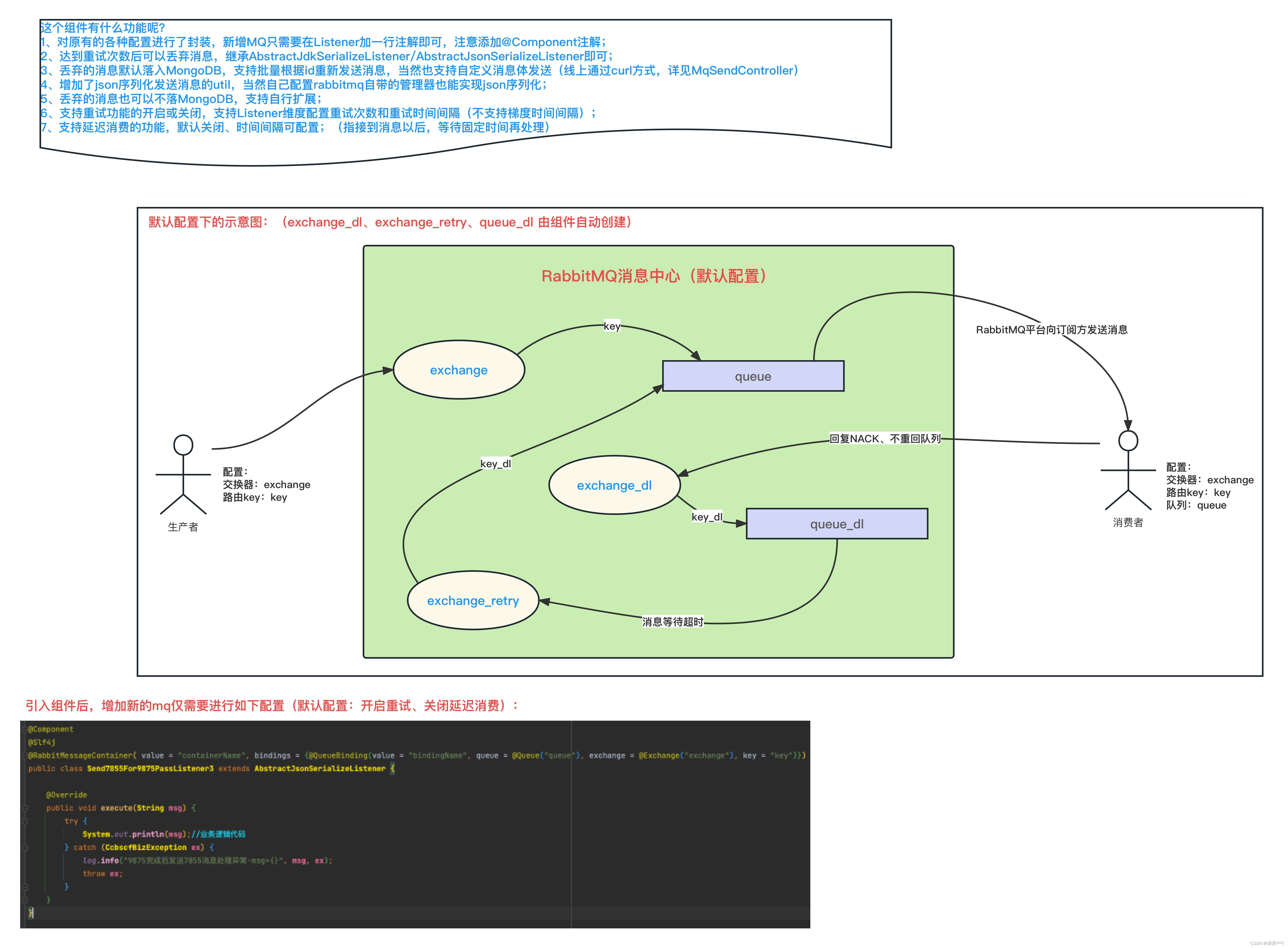
关于 自定义的RabbitMQ的RabbitMessageContainer注解-实现原理
概述 RabbitMessageContainer注解 的主要作用就是 替换掉Configuration配置类中的各种Bean配置; 采用注解的方式可以让我们 固化配置,降低代码编写复杂度、减少配置错误情况的发生,提升编码调试的效率、提高业务的可用性。 为什么说“降低…...
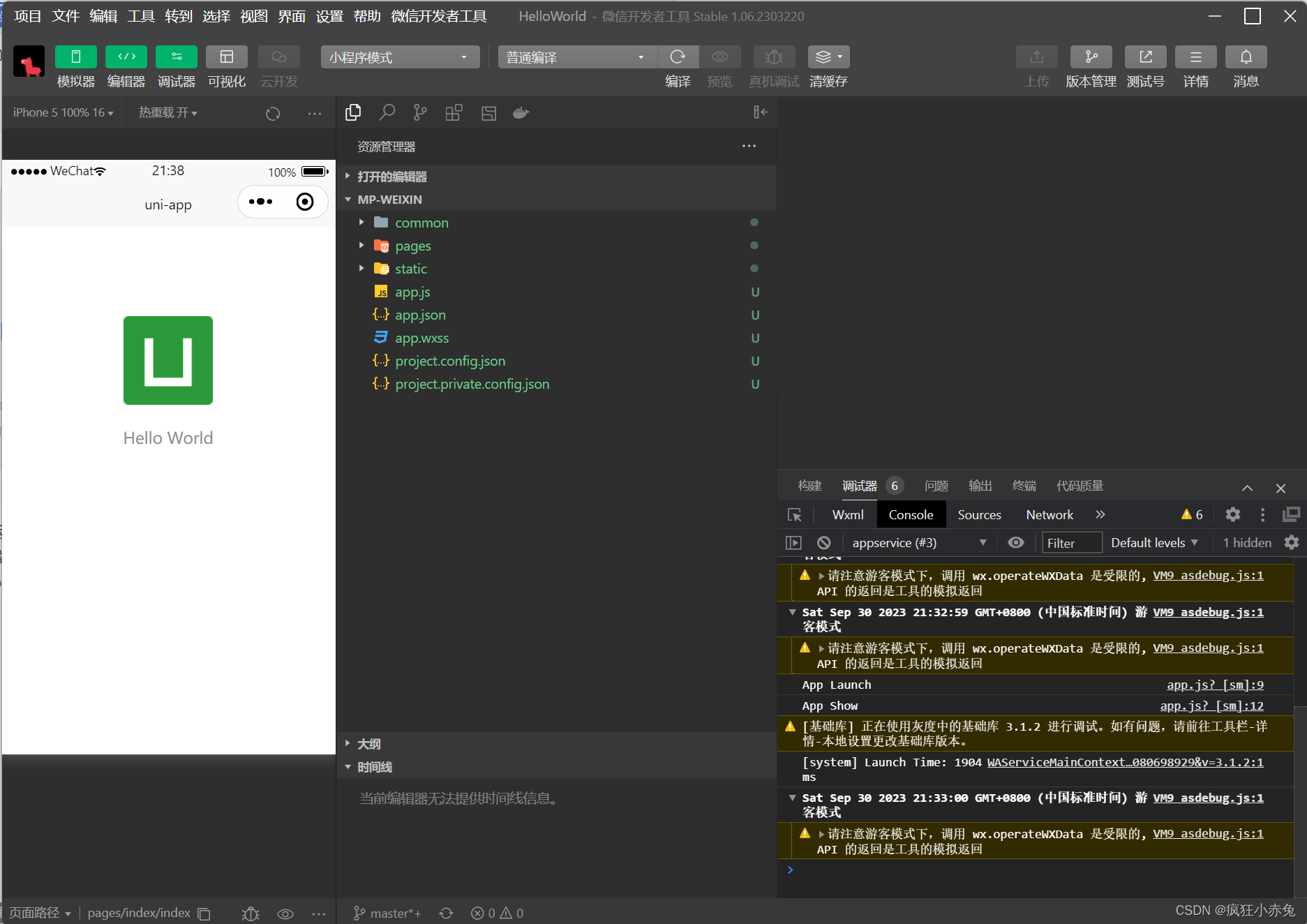
uniapp快速入门系列(1)- 概述与基础知识
章节三:抖音小程序页面开发 第1章:概述与基础知识1.1 uniapp简介1.1.1 什么是uniapp?1.1.2 为什么选择uniapp?1.1.3 uniapp与微信小程序的关系 1.2 HBuilderX介绍与安装1.2.1 什么是HBuilderX?1.2.2 HBuilderX的安装1.…...

国密国际SSL双证书解决方案,满足企事业单位国产国密SSL证书要求
近年来,为了摆脱对国外技术和产品的依赖,建设安全的网络环境,以及加强我国对网络信息的安全可控能力,我国推出了国密算法。同时,为保护网络通信信息安全,更高级别的安全加密数字证书—国密SSL证书应运而生。…...
)
用ChatGPT批量生成高互动Instagram内容:5步工作流+4类避坑红线(数据实测CTR提升217%)
更多请点击: https://intelliparadigm.com 第一章:用ChatGPT批量生成高互动Instagram内容:5步工作流4类避坑红线(数据实测CTR提升217%) 借助ChatGPT API 与 Instagram Graph API 的协同调度,可构建轻量级自…...

魔兽争霸3优化指南:5个常见问题与WarcraftHelper解决方案
魔兽争霸3优化指南:5个常见问题与WarcraftHelper解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 你是否在玩《魔兽争霸3》时遇到过…...

Versal AI Engine加速椭圆曲线密码学计算实践
1. 项目概述:Versal AI Engine加速椭圆曲线密码学计算在当今的数字安全领域,椭圆曲线密码学(ECC)因其高安全性和计算效率成为主流方案。其中,多标量乘法(MSM)作为ECC的核心运算,在零…...

原生TypeScript待办清单:纯前端架构、观察者模式与拖拽排序实践
1. 项目概述:一个由AI辅助构思的现代化待办清单最近在整理个人项目时,我重新审视了一个之前用TypeScript写的待办清单应用。这个项目的初衷很简单:我需要一个极简、快速、完全由我掌控的待办工具,它不需要登录,数据就存…...

使用Taotoken管理控制台进行APIKey的权限划分与审计日志查看
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken管理控制台进行APIKey的权限划分与审计日志查看 在团队协作开发或构建多应用服务时,统一管理大模型API的访…...
:超出3个指标即触发强制重构——你达标了吗?)
DeepSeek Clean Code终极阈值(v2.3.1正式版):超出3个指标即触发强制重构——你达标了吗?
更多请点击: https://intelliparadigm.com 第一章:DeepSeek Clean Code终极阈值的演进与哲学内核 DeepSeek Clean Code 的“终极阈值”并非静态指标,而是代码可维护性、语义清晰度与执行确定性三者动态收敛的临界点。它源于对 LLM 推理链中 …...

从入门到精通:IGV基因组浏览器实战操作全解析
1. IGV基因组浏览器初探 第一次接触IGV(Integrative Genomics Viewer)是在五年前分析RNA-seq数据时,当时被它轻量级的安装包和流畅的基因组导航体验惊艳到了。作为一款由Broad研究所开发的免费工具,IGV完美平衡了专业性和易用性—…...

免费LLM API实战指南:从选型到架构的完整解决方案
1. 项目概述:一份免费LLM API的实用指南 如果你正在开发AI应用,或者只是想低成本地体验各种大语言模型,那么“API调用成本”绝对是一个绕不开的痛点。无论是OpenAI还是Anthropic,按Token计费的模式在频繁调用下,账单数…...

别再复制粘贴了!手把手教你封装一个可复用的Qt文本编辑器核心组件类
从零封装高复用Qt文本编辑器核心类:工程化实践指南 在Qt开发中,文本编辑器是最常见的功能需求之一。许多开发者习惯将所有逻辑堆砌在MainWindow类中,导致代码臃肿、难以维护和复用。本文将带你从工程化角度重构文本编辑器,将其核心…...

处理电商分类难题:我是如何用XGBoost为Otto数据集做多类别预测的
电商商品分类实战:XGBoost在Otto数据集上的高阶应用 当面对海量商品需要精准分类时,传统人工规则往往力不从心。Otto Group Product Classification Challenge正是这样一个典型场景——需要将数十万商品准确划分到93个类别中。本文将分享如何用XGBoost构…...