ur3+robotiq ft sensor+robotiq 2f 140+realsense d435i配置rviz,gazebo仿真环境
ur3+robotiq ft sensor+robotiq 2f 140+realsense d435i配置rviz,gazebo仿真环境
搭建环境:
ubuntu: 20.04
ros: Nonetic
sensor: robotiq_ft300
gripper: robotiq_2f_140_gripper
UR: UR3
reasense: D435i
通过下面几篇博客配置好了ur3、力传感器和robotiq夹爪的rviz和gazebo仿真环境
ubuntu20.04配置UR机械臂的仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置rviz仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置gazebo仿真环境
下面我们给仿真环境加上Realsense D435i
1. 安装realsense-ros
克隆仓库链接
因为我使用的是ros1故采用ros1-legacy分支
将仓库克隆到之前的工作路径下
cd ~/catkin_ws/src
git clone https://github.com/IntelRealSense/realsense-ros.git
然后按照仓库中的readme教程安装,这里我采用的是方法二,因为之前我已经安装过RealSense SDK了,之前这一篇博客有安装RealSense SDK的教程,所以我下面直接跳到step2,仓库按照上面克隆到相应路径后,执行下面命令,跟着readme做就行了
cd cd ~/catkin_ws/src/realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
完了之后,需要安装一个ros工具包ddynamic_reconfigure,不然后面编译会出问题,做法是直接将仓库克隆到工作路径src文件夹下
cd ~/catkin_ws/src
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
后面直接按照readme命令编译,如果编译不过的话将工作目录下的build和devel删除重新编译试试
cd ~/catkin_ws/src
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
source devel/setup.bash
至此,realsense-ros就安装好了
2. 在rviz仿真环境中加上realsense D435i
根据之前ur3+robotiq ft sensor+robotiq 2f 140配置rviz仿真环境的博客,我们复制universal_robot/ur_description/urdf文件夹下的ur3_ft_gripper.xacro文件,并命名为ur3_ft_gripper_realsense.xacro,在该文件后面加上调用realsense的代码,加入代码如下:
<!-- Add realsense d435i --><xacro:arg name="use_nominal_extrinsics" default="false" /><xacro:include filename="$(find realsense2_description)/urdf/_d435i.urdf.xacro"/><xacro:sensor_d435i parent="base" use_nominal_extrinsics="$(arg use_nominal_extrinsics)"><origin xyz="0.4 0 1" rpy="0 1.57 0"/></xacro:sensor_d435i>
parent指定为base是因为在机械臂描述文件(urdf)中,base_link是连接在base上的,不是之前的world,该文件完整代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro" name="ur3_robot_ft_gripper"><xacro:include filename="$(find ur_description)/urdf/inc/ur3_macro.xacro"/><xacro:ur3_robot prefix="" /><xacro:include filename="$(find robotiq_ft_sensor)/urdf/robotiq_ft300.urdf.xacro"/> <xacro:include filename="$(find robotiq_2f_140_gripper_visualization)/urdf/robotiq_arg2f_140.xacro" /><!--robotiq_ft_sensor--><xacro:robotiq_ft300 prefix="" parent="tool0"><origin xyz="0 0 0" rpy="0 0 0"/></xacro:robotiq_ft300><!--robotiq_arg2f_140.xacro已经调用了robotiq_arg2f_140宏定义,这里只需要把gripper和sensor用joint连接起来即可--><joint name="ft_gripper_joint" type="fixed"><parent link="robotiq_ft_frame_id"/><child link="robotiq_arg2f_base_link"/><origin xyz="0 0 0" rpy="0 0 0"/></joint><!-- Add realsense d435i --><xacro:arg name="use_nominal_extrinsics" default="false" /><xacro:include filename="$(find realsense2_description)/urdf/_d435i.urdf.xacro"/><xacro:sensor_d435i parent="base" use_nominal_extrinsics="$(arg use_nominal_extrinsics)"><origin xyz="0.4 0 1" rpy="0 1.57 0"/></xacro:sensor_d435i></robot>复制universal_robot/ur_description/launch文件夹下中的view_ur3_ft_gripper.launch,load_ur3_ft_gripper.launch,load_ur_ft_gripper.launch文件,分别重命名为view_ur3_ft_gripper_realsense.launch,load_ur3_ft_gripper_realsense.launch,load_ur_ft_gripper_realsense.launch,分别改一下调用的文件名称
view_ur3_ft_gripper_realsense.launch修改如下图
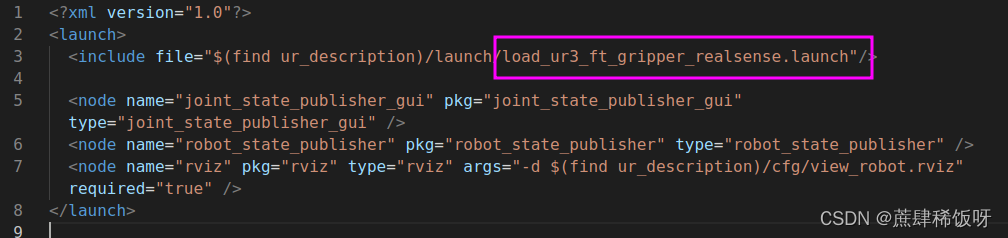
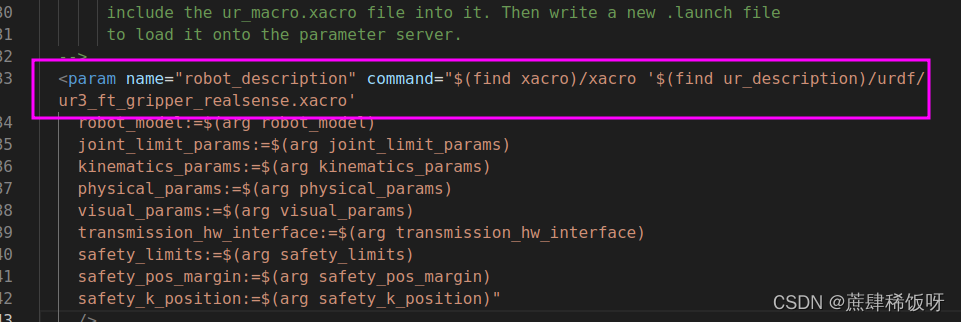
load_ur3_ft_gripper_realsense.launch修改如下图
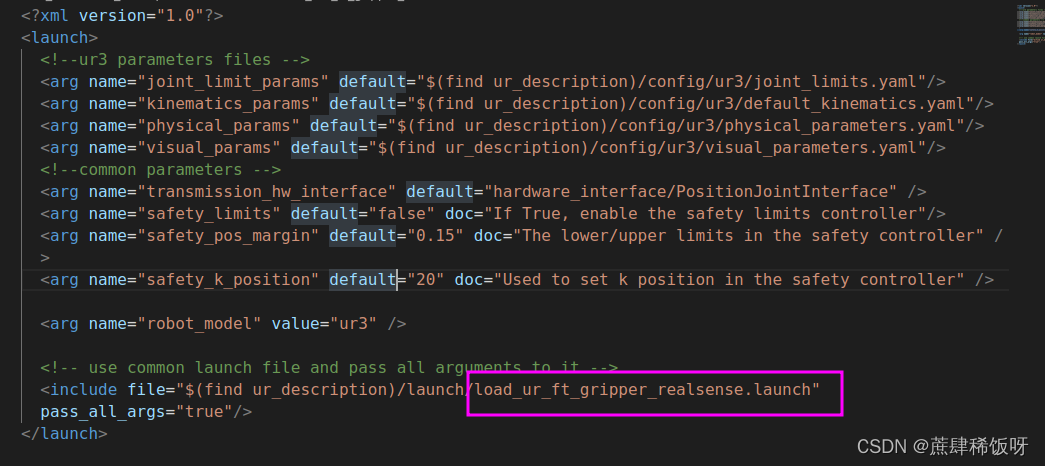
load_ur_ft_gripper_realsense.launch修改如下图
查看效果
运行命令
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur_description view_ur3_ft_gripper_realsense.launch
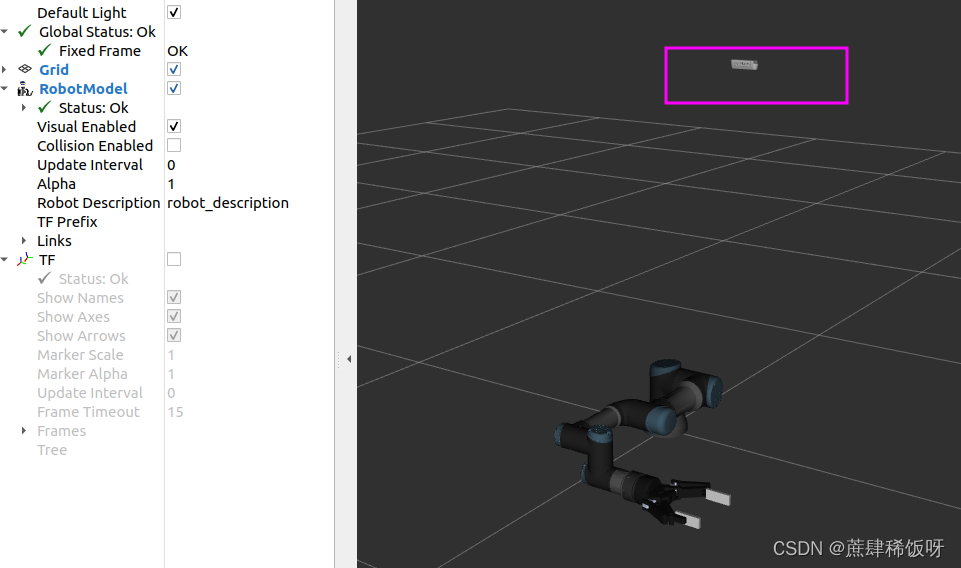
可以看到realsense已经加上去了
3. 在gazebo仿真环境中加上realsense D435i
在这里需要下载一个realsense模型和插件包,仓库地址
cd ~/catkin_ws/src
git clone https://github.com/nilseuropa/realsense_ros_gazebo.git
cd ..
# 编译一下,如果编译不过的话将工作目录下的`build`和`devel`删除重新编译试试
catkin_make
然后在universal_robot/ur_gazebo/urdf目录下ur_macro.xacro的文件中加上以下调用代码
<!-- Add realsense d435 -->
<xacro:include filename="$(find realsense_ros_gazebo)/xacro/depthcam.xacro"/><xacro:realsense_d435 sensor_name="d435" parent_link="base" rate="10">
<origin xyz="0.4 0 1" rpy="0 1.57 0"/>
</xacro:realsense_d435>
这里使用的是D435,而不是D435i,因为这个包里面没有D435i,先D435用着,后面参考这个博客手动添加IMU,达到D435i的效果,ur_macro.xacro文件完整代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro"><!-- Definition of the main macro --><xacro:macro name="ur_robot_gazebo" params="prefixjoint_limits_parameters_filekinematics_parameters_filephysical_parameters_filevisual_parameters_filetransmission_hw_interface:=hardware_interface/EffortJointInterfacesafety_limits:=false safety_pos_margin:=0.15 safety_k_position:=20"><xacro:include filename="$(find ur_description)/urdf/inc/ur_macro.xacro"/><!-- Instantiate model for the REAL robot. --><xacro:ur_robotprefix="${prefix}"joint_limits_parameters_file="${joint_limits_parameters_file}"kinematics_parameters_file="${kinematics_parameters_file}"physical_parameters_file="${physical_parameters_file}"visual_parameters_file="${visual_parameters_file}"transmission_hw_interface="${transmission_hw_interface}"safety_limits="${safety_limits}"safety_pos_margin="${safety_pos_margin}"safety_k_position="${safety_k_position}"/><!-- Configure self collision properties per link --><gazebo reference="${prefix}shoulder_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}upper_arm_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}forearm_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}wrist_1_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}wrist_3_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}wrist_2_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}ee_link"><selfCollide>true</selfCollide></gazebo><!--Inject Gazebo ROS Control plugin, which allows us to use ros_controlcontrollers to control the virtual robot hw.--><gazebo><plugin name="ros_control" filename="libgazebo_ros_control.so"><!--robotNamespace>/</robotNamespace--><!--robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType--></plugin></gazebo></xacro:macro><xacro:include filename="$(find robotiq_ft_sensor)/urdf/robotiq_ft300.urdf.xacro"/> <xacro:include filename="$(find robotiq_2f_140_gripper_gazebo)/urdf/robotiq_arg2f_140.xacro" /><!--robotiq_ft_sensor--><xacro:robotiq_ft300 prefix="" parent="tool0"><origin xyz="0 0 0" rpy="0 0 0"/></xacro:robotiq_ft300><!--robotiq_arg2f_140.xacro已经调用了robotiq_arg2f_140宏定义,这里只需要把gripper和sensor用joint连接起来即可--><joint name="ft_gripper_joint" type="fixed"><parent link="robotiq_ft_frame_id"/><child link="robotiq_arg2f_base_link"/><origin xyz="0 0 0" rpy="0 0 0"/></joint><!-- Add realsense d435 --><xacro:include filename="$(find realsense_ros_gazebo)/xacro/depthcam.xacro"/><xacro:realsense_d435 sensor_name="d435" parent_link="base" rate="10"><origin xyz="0.4 0 1" rpy="0 1.57 0"/></xacro:realsense_d435>
</robot>查看效果
运行命令
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur_gazebo ur3_bringup.launch
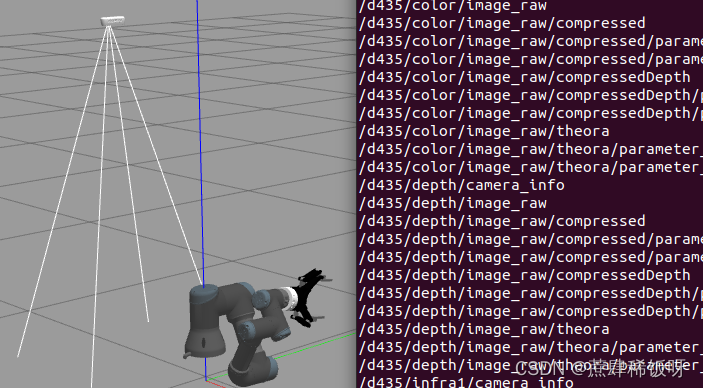
可以看到realsens已经加入到gazebo中,并且通过rostopic list看到其发布的话题
相关文章:
ur3+robotiq ft sensor+robotiq 2f 140+realsense d435i配置rviz,gazebo仿真环境
ur3robotiq ft sensorrobotiq 2f 140realsense d435i配置rviz,gazebo仿真环境 搭建环境: ubuntu: 20.04 ros: Nonetic sensor: robotiq_ft300 gripper: robotiq_2f_140_gripper UR: UR3 reasense: D435i 通过下面几篇博客配置好了ur3、力传…...

ASP.NET Core MVC 项目 AOP之Authorization
目录 一:说明 二:传统鉴权授权的基本配置 三 :角色配置说明 四:策略鉴权授权 五:策略鉴权授权Requirement扩展 总结 一:说明 鉴权:是指验证你是否登录,你登录后的身份是什么。…...
智能新冠疫苗接种助手管理系统
项目背景介绍 近几年来,网络事业,特别是Internet发展速度之快是任何人都始料不及的。目前,由于Internet表现出来的便捷,快速等诸多优势,已经使它成为社会各行各业,甚至是平民大众工作,生活不可缺少的一个重…...

Python+Selenium4元素交互1_web自动化(5)
目录 0. 上节回顾 1. 内置的等待条件 2. 元素属性 1. Python对象属性 2. HTML元素属性 3. 元素的交互 1. 输入框 2. 按钮 3. 单选框和复选框 0. 上节回顾 DEBUG的方式:JS断点 Python断点编程语言提供的等待方式:sleepselenium提供的等待方式&…...

2023双非计算机硕士应战秋招算法岗之深度学习基础知识
word版资料自取链接: 链接:https://pan.baidu.com/s/1H5ZMcUq-V7fxFxb5ObiktQ 提取码:kadm 卷积层 全连接神经网络需要非常多的计算资源才能支撑它来做反向传播和前向传播,所以说全连接神经网络可以存储非常多的参数,…...
Python opencv进行矩形识别
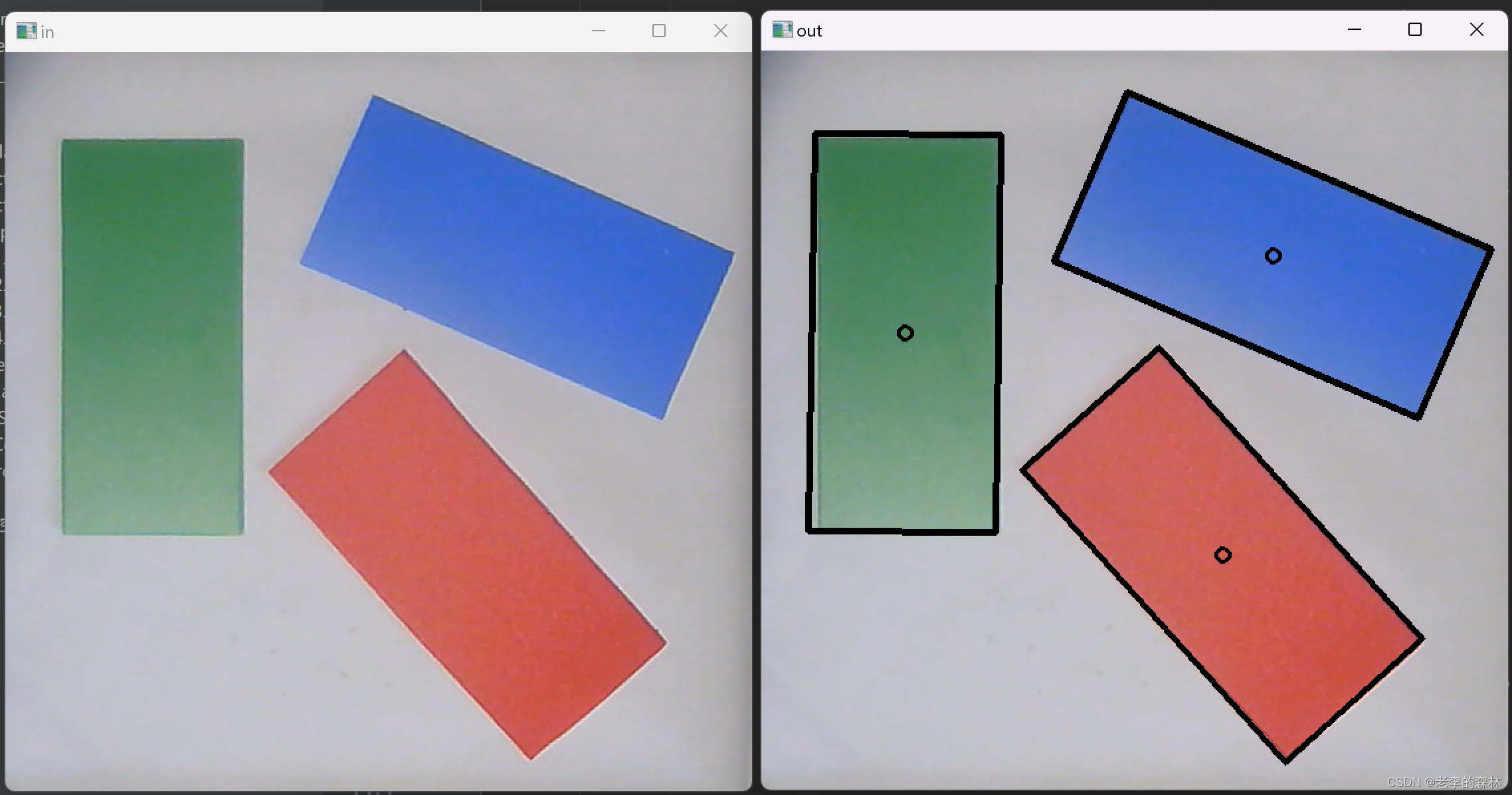
Python opencv进行矩形识别 图像识别中,圆形和矩形识别是最常用的两种,上一篇讲解了圆形识别,本例讲解矩形识别,最后的结果是可以识别出圆心,4个顶点,如下图: 左边是原始图像,右边是识别结果,在我i5 10400的CPU上,执行时间不到8ms。 识别出结果后,计算任意3个顶点…...

网安入门必备的12个kali Linux工具
kali Linux工具帮你评估 Web 服务器的安全性,并帮助你执行黑客渗透测试。 注意:这里不是所提及的所有工具都是开源的。 1. Nmap Nmap ( 网络映射器 )是一款用于 网络发现 和 安全审计 的 网络安全 工具. 主机发现,端口扫描,版本…...
【测试面试】头条大厂,测试开发岗真实一面。你能抵得住吗?
目录:导读前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜)前言 小吴: 现…...

分享app的测试技巧
前言 今天笔者想和大家来唠唠app测试,现在的app有非常的多,这些app都是需要经过测试之后才能发布到应用市场中,app已经成为了我们日常生活中不可或缺的一部分了,但它的功能必须强大,才能受到消费者的重视,…...
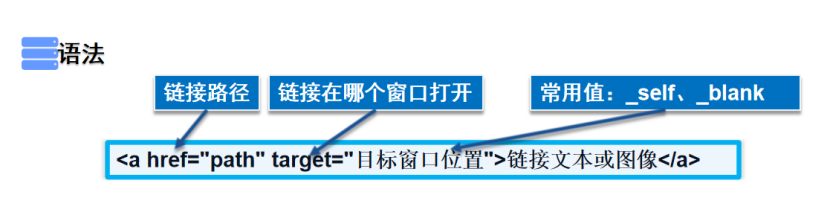
HTML 基础【快速掌握知识点】
目录 一、什么是HTML? 二、HTML的发展史 三、HTML5的优势 四、HTML基本结构 五、DOCTYPE声明 六、title标签 七、meta标签 八、标题标签 九、段落标签 十、换行标签 十一、水平线标签 十二、字体样式标签 十三、特殊符号 十四、图像标签 十五、链接标…...
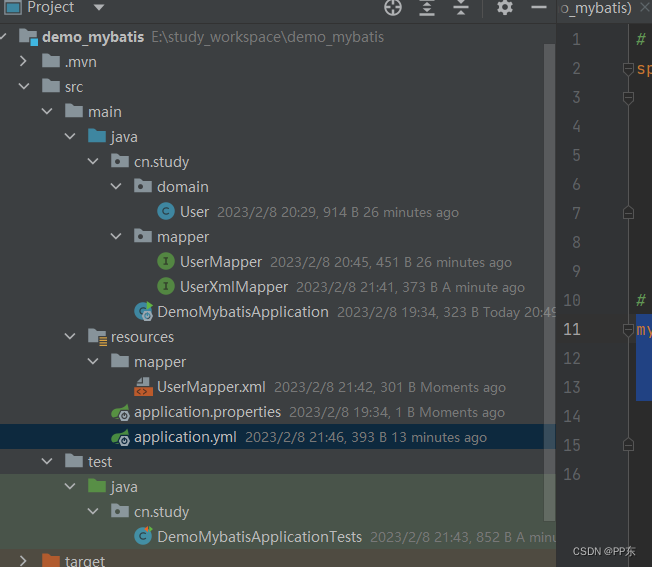
SpringBoot入门(二)
这里写目录标题一、SpringBoot整合Junit1.1 搭建SpringBoot工程1.2 引入starter-test起步依赖1.3 编写类1.4 测试二、SpringBoot整合mybatis2.1 搭建SpringBoot工程2.2 引入mybatis起步依赖,添加驱动2.3 编写DataSource和MyBatis相关配置2.4 定义表和实体类2.5 编写…...
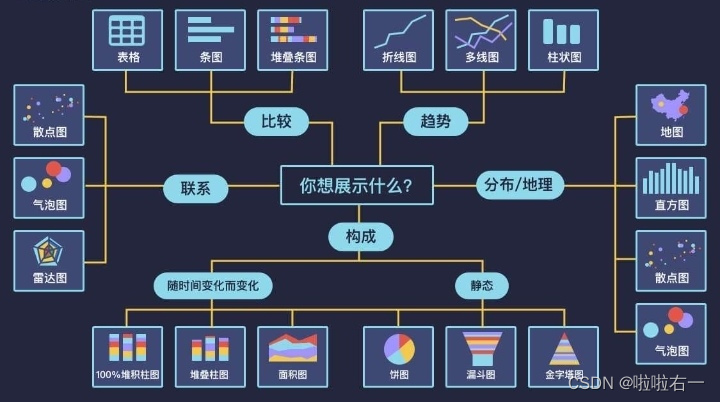
大数据|大数据基础(概念向)
目录 📚大数据概念 🐇常见数据存储单位 🐇大数据的特点(5V) 🐇大数据 VS 数据库 🌟数据库 🌟大数据 📚大数据业务分析基本步骤 🐇收集数据 Ǵ…...

若依配置教程(九)若依前后端分离版部署到服务器Nginx(Windows版)
搭建若依环境 要部署到服务器上,首先要在本地运行若依系统 文章目录搭建若依环境后端部署1.在application.yml中修改后台端口,这里默认是8080。2.在application-druid.yml中修改正式环境数据库。3.后端打包部署前端部署下载安装NginxNginx代理配置启动N…...
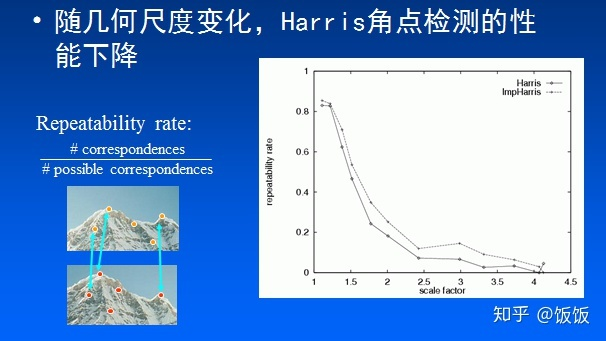
【仔细理解】计算机视觉基础1——特征提取之Harris角点
Harris角点是图像特征提取中最基本的方法,本篇内容将详细分析Harris角点的定义、计算方法、特点。 一、Harris角点定义 在图像中,若以正方形的小像素窗口为基本单位,按照上图可以将它们划分三种类型如下: 平坦区域:在任…...
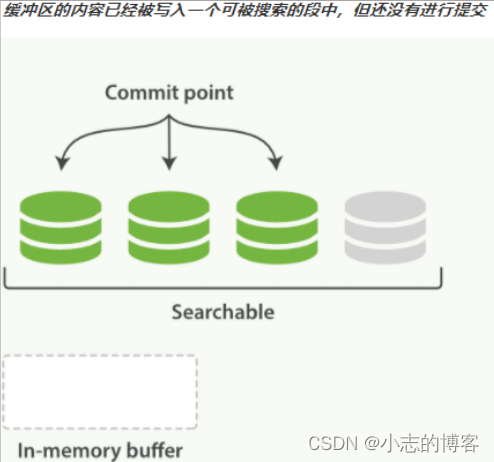
Elasticsearch7.8.0版本进阶——近实时搜索
目录一、近实时搜索的概述1.1、按段(per-segment)搜索1.2、更轻量的方式搜索二、为什么Elasticsearch是 近 实时搜索三、如何解决索引了一个文档然后却没有搜到四、哪种情况不需要每秒刷新4.1、使用 Elasticsearch 索引大量的日志文件4.2、使用 Elastics…...
OAK相机深度流探测草莓距离
编辑:OAK中国 首发:oakchina.cn 喜欢的话,请多多👍⭐️✍ 内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。 ▌前言 Hello,大家好,这里是OAK中国,我是助手…...
的相关知识及指令)
文件共享服务器(CIFS)的相关知识及指令
文件共享服务器(CIFS) 微软开发的 共享服务器概述 通过网络提供文件共享拂去,提供文件下载和上传服务(类似于FTP服务器) 创建共享 通过本地登录时,仅受NTFS权限的控制通过网络访问时,受共享…...

springcloud-2service consumer
创建使用会员微服务模块-service consumer思路分析/图解创建Moduel(member-service-consumer-80) & 完成配置new Module->member-service-consumer-80->finish检查父子项目的pom是否添加相应的对应module和parent本项目的pom.xml可以参考provider的,并删掉…...
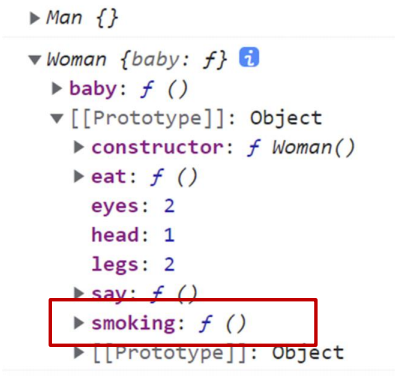
JavaScript 进阶--charater3
文章目录前言一、编程思想1.1 面向过程介绍1.2 面向对象编程 (oop)对比二、构造函数三、原型3.1原型3.2 constructor 属性3.3 对象原型3.4 原型继承3.5 原型链总结前言 🆑学习目标 理解面向对象思想,掌握函数原型对象运用面向对象封装继承特点…...

Solon2 之基础:三、启动参数说明
启动参数,在应用启动后会被静态化(为了内部更高效的利用)。比如,想通过体外扩展加载配置,是不能改掉它们的。 1、启动参数 启动参数对应的应用配置描述–envsolon.env环境(可用于内部配置切换)…...

Gofile批量下载自动化工具:5步实现高效文件管理解决方案
Gofile批量下载自动化工具:5步实现高效文件管理解决方案 【免费下载链接】gofile-downloader Download files from https://gofile.io 项目地址: https://gitcode.com/gh_mirrors/go/gofile-downloader 在当今数字化工作环境中,技术团队经常需要从…...

SMUDebugTool终极指南:如何深度掌控AMD Ryzen处理器的隐藏性能
SMUDebugTool终极指南:如何深度掌控AMD Ryzen处理器的隐藏性能 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: ht…...

如何快速集成 react-native-bottom-sheet-behavior:5 分钟搞定 Android 底部弹窗
如何快速集成 react-native-bottom-sheet-behavior:5 分钟搞定 Android 底部弹窗 【免费下载链接】react-native-bottom-sheet-behavior react-native wrapper for android BottomSheetBehavior 项目地址: https://gitcode.com/gh_mirrors/re/react-native-bottom…...

OpenRASP原理与实战:Java应用层实时防护技术详解
1. 为什么我宁愿花三天部署OpenRASP,也不愿再写第五个自定义WAF过滤器去年冬天,我在给一家做在线教育SaaS平台做安全加固时,连续踩了三个坑:第一次用NginxLua写了套SQL注入规则,结果学生提交的“SELECT * FROM courses…...

Style-Bert-VITS2未来发展方向:从语音克隆到实时语音转换的技术演进路线
Style-Bert-VITS2未来发展方向:从语音克隆到实时语音转换的技术演进路线 【免费下载链接】Style-Bert-VITS2 Style-Bert-VITS2: Bert-VITS2 with more controllable voice styles. 项目地址: https://gitcode.com/gh_mirrors/st/Style-Bert-VITS2 Style-Bert…...

Claude Agent SDK 从 0 到 1 快速上手教程
Claude Agent SDK 从 0 到 1 快速上手教程 什么是 Claude Agent SDK? Claude Agent SDK 是 Anthropic 官方推出的用于构建 AI 智能体的开发工具包。它基于 Claude Code 构建,让开发者能够以编程方式创建、扩展和定制由 Claude 驱动的应用程序。与简单的聊天机器人不同,基于…...

收藏干货|2026 版双非零基础入局大模型开发,RAG 与 Agent 就业上岸全攻略
日常总能收到不少初学伙伴的私信,大家普遍都有同一个疑惑:二本及普通院校学历,零基础入门 RAG、Agent 大模型应用开发,究竟能不能顺利入职?行业后续发展前景又如何? 本篇 2026 年全新内容,不空谈…...

Lovable电商网站搭建,为什么92%的初创团队在第3周就遭遇性能雪崩?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署。其核心基于 Vue 3(Composition API&a…...

Visual C++运行库一键安装指南:彻底解决Windows应用依赖问题
Visual C运行库一键安装指南:彻底解决Windows应用依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过打开软件时弹出"缺少…...

NsEmuTools:10分钟搞定NS模拟器配置,让你专注游戏乐趣
NsEmuTools:10分钟搞定NS模拟器配置,让你专注游戏乐趣 【免费下载链接】ns-emu-tools 一个用于安装/更新 NS 模拟器的工具 项目地址: https://gitcode.com/gh_mirrors/ns/ns-emu-tools 还在为NS模拟器的复杂配置而头疼吗?每次想玩Swit…...