SLAM从入门到精通(tf的使用)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
在ros的机器人学习过程中,有一件事情是肯定少不了的。那就是坐标系的转换。其实这也很容易理解。假设有一个机器人,它有一个3d camera、有一个机械手臂。这个时候有一个需求,需要通过3d camera告知物体的位置,然后通知另外一个机械手臂取走。
看上去这个任务很简单,但是这中间就涉及到了坐标系的转换。比如说,摄像头识别到物体,这个时候物体是摄像头坐标系下的一个pose,需要通过robot1坐标系、全局坐标系的转换关系,进一步变成世界坐标系下的位置。这样,camera看到的物体pose,就有一个全局pose信息,虽然还是同一个物品。
那么这个物体的位姿信息怎么通知到机械手臂呢?那么又需要进行反向的坐标系转换。即将物体的全局pose,转成robot2坐标系下的pose,然后进一步转换成机械手臂下的局部pose。这样机械手臂,就可以根据这个局部的pose信息,实现物体的抓取了。

1、tf的作用
tf的主要作用,其实就是实现坐标系的转换。它的作用,有可能是局部坐标系到世界坐标系,也有可能是世界坐标系到局部坐标系。

2、tf的主要构成
坐标系的主要沟通有两部分,一部分是xyz,一部分是围绕xyz坐标轴的旋转。其中xyz就是直接用浮点数表示,旋转一般用xyzw的四元数来表示。如果要转成rpy的角度转换,需要用tf提供的公式转换一下。
3、tf的计算方法
目前计算的方法很多,不过主要还是利用矩阵计算,如果是计算一个点在另外一个坐标系下的坐标,过程中仅仅涉及到旋转的话,一般是
中间如果涉及到位移的话,一般还会添加一个offset,
这样的公式虽然比较简单,但是转成矩阵不太方便,我们可以通过补齐1来处理,
这样看上去公式完美一些了,可以进一步简化一下,
公式上面似乎回到了原点,但是每一个变量的含义其实都发生了改变。当然,这里的R仅仅表示P0到P1的转变。很多人也许会问了,如果是P1到P0的转变,这个时候应该怎么处理呢。这个时候矩阵的优势就发挥出来了,
所以,如果是需要P1坐标系下面的一个点,此时需要秀姐P0坐标系下的坐标,它所需要的就是求解旋转矩阵R的逆即可。有了单一的坐标转换,那么连续的坐标转换就变得容易了,
反之也是一样,
4、tf中的静态消息和动态消息
坐标系转换中,有的是静态转换,有的是动态转换。所谓的静态转换,就是那种确定了之后,就一直不变化的。比如传感器和robot之间的固定位置。还有一种就是动态变换,它所指向的就是那种一直在变化的坐标映射关系,比如robot和map之间的位置转换关系。
5、amcl举例说明
关于amcl算法,大家可以参考这个链接http://wiki.ros.org/amcl。在这中间就包含了大家想学习的tf信息。

根据输入,它所以依赖的消息有scan雷达、tf坐标系转换、初始位置、map地图四个数据。第1、3、4都比较好理解。而第2个数据就和今天学习的知识相关,包含了lidar到robot、robot到odom的转换等。一开始的时候,我们还在寻找算法里面怎么没有里程计odom的数据,其实答案就在tf里面。
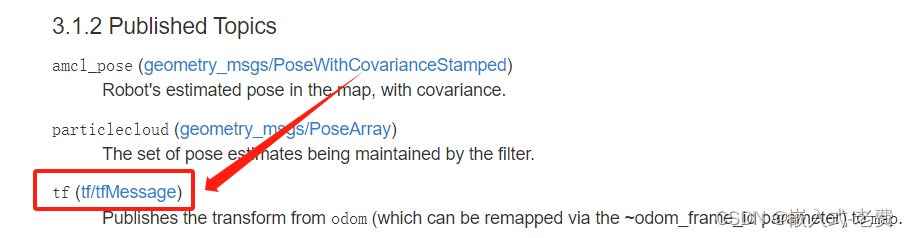
经过算法求解,这个时候会输出三种数据,分别是amcl位姿、粒子云和tf。第1、2都比较好理解,还有一个tf数据。根据英文解释,它发布的就是map坐标系下odom的里程数据。
6、tf的编程接口
了解一些tf的编程接口,也对我们理解和认识tf很有帮助。如果是tf的发布,一般会涉及到这样的接口,
tf::TransformBroadcaster
tf::Transform
tf::Quaternion相反,如果是一些接收的接口,也会有一些tf的数据结构,
tf::TransformListener
geometry_msgs::PointStamped相关文章:
SLAM从入门到精通(tf的使用)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 在ros的机器人学习过程中,有一件事情是肯定少不了的。那就是坐标系的转换。其实这也很容易理解。假设有一个机器人,它有一个…...
python代码混淆与代码打包
0x00 背景 自己写的项目,又想保护源码,自己做个混淆是最方便的了。 0x01 实践 这里使用开源工具 GitHub - astrand/pyobfuscate: pyobfuscate,虽然git上才500多star,但是很好用。它的使用场景是混淆单个py文件。很多事物有开始就…...
)
Codeforces Round 899 (Div. 2)
Dashboard - Codeforces Round 899 (Div. 2) - Codeforces A. Increasing Sequence 由于a与b不相等,但b必须算出最小故可以从最小开始(1),故如果b a就将其值,使其改变即可,其余由于b1 < b2 < b3..…...
【 SuperPoint 】图像特征提取上的对比实验
1. SIFT,SuperPoint 都具有提取图片特征点,并且输出特征描述子的特性,本篇文章从特征点的提取数量,特征点的正确匹配数量来探索一下二者的优劣。 SuperPoint提取到的特征点数量要少一些,可以理解,我想原因大…...
Chrome获取RequestId
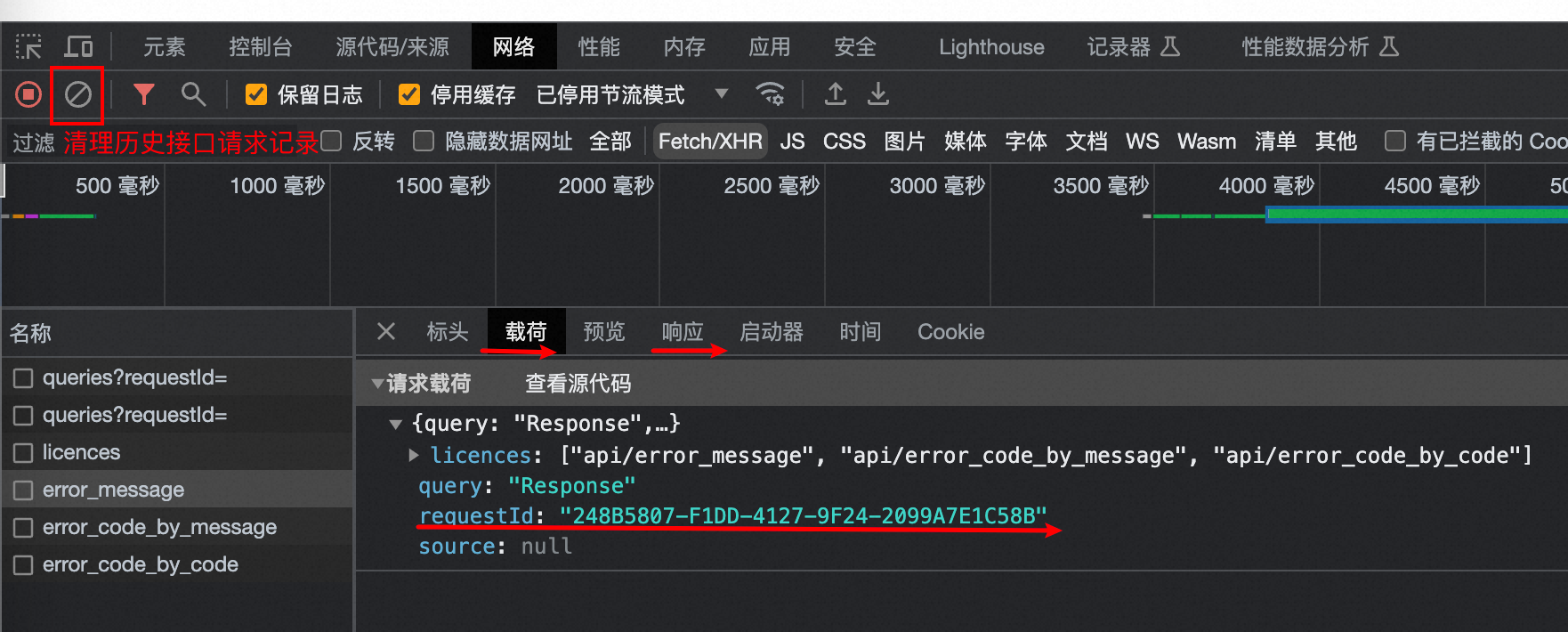
Chrome获取RequestId 参考:https://help.aliyun.com/zh/redis/how-do-i-obtain-the-id-of-a-request 在浏览器页面按下F12键,打开开发者工具页面; 在开发者工具页面,单击Network(网络); 在playload(载荷)窗口中找到目…...

cesium 雷达扫描 (线行扩散效果)
cesium 雷达扫描 (线行扩散效果) 1、实现方法 使用ellipse方法加载圆型,修改ellipse中material方法来实现效果 2、示例代码 2.1、 <!DOCTYPE html> <html lang="en"><head><<...
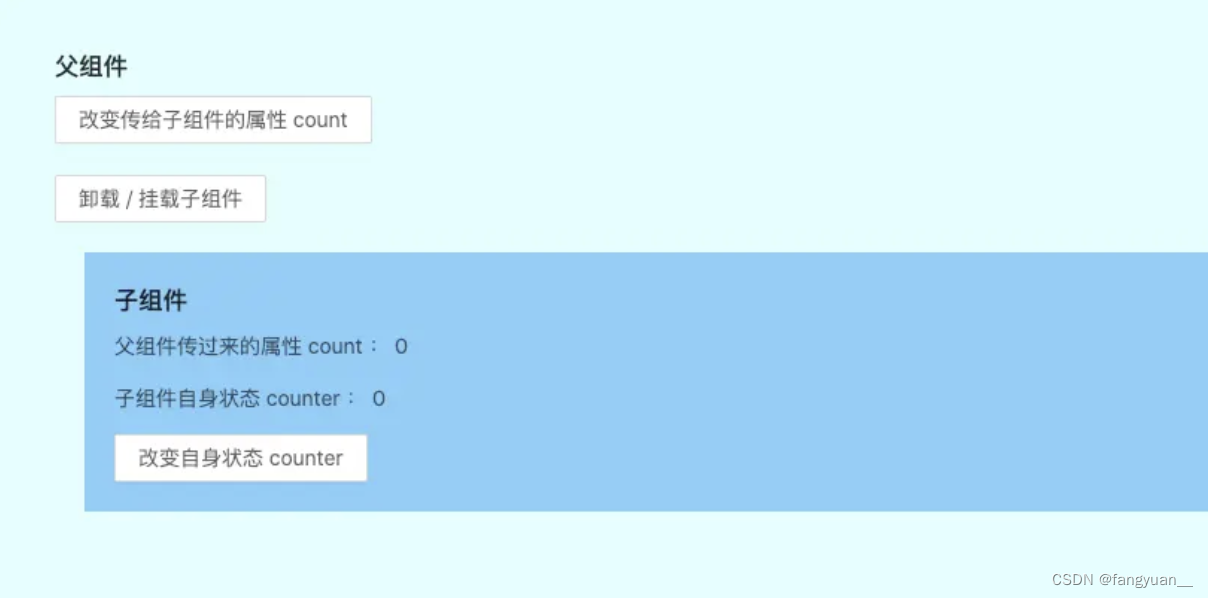
【React】React组件生命周期以及触发顺序(部分与vue做比较)
最近在学习React,发现其中的生命周期跟Vue有一些共同点,但也有比较明显的区别,并且执行顺序也值得讨论一下,于是总结了一些资料在这里,作为学习记录。 v17.0.1后生命周期图片 初始化阶段 由ReactDOM.render()触发 —…...

【C++】多线程的学习笔记——白话文版(bushi
目录 为什么要使用多线程 例子 代码 结果 首先要先学的库——thread库 thread的简介 thread的具体使用方法 基本变量的定义 注意(小重点) join函数的解读(重点) detach函数的解读 注意 关于vector和thread是联合使用 …...
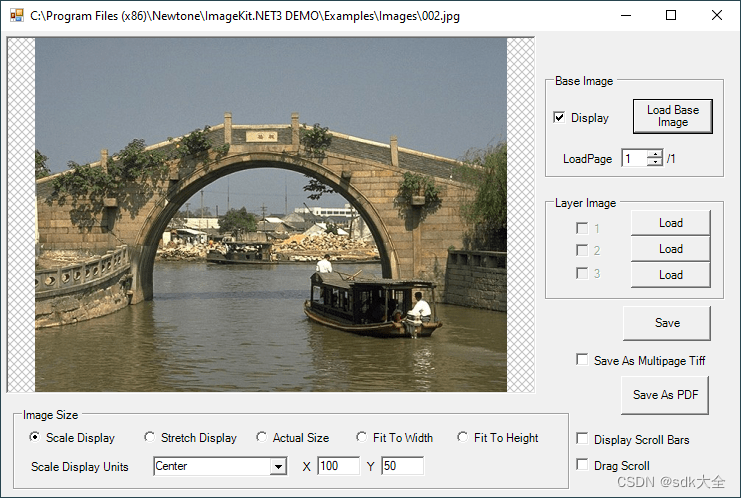
图像处理: ImageKit.NET 3.0.10704 Crack
关于 ImageKit.NET3 100% 原生 .NET 图像处理组件。 ImageKit.NET 可让您快速轻松地向 .NET 应用程序添加图像处理功能。从 TWAIN 扫描仪和数码相机检索图像;加载和保存多种格式的图像文件;对图像应用图像滤镜和变换;在显示屏、平移窗口或缩略…...
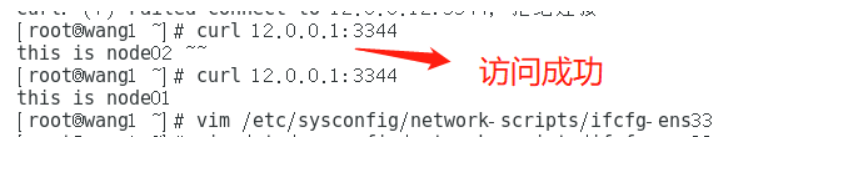
K8S内容分发网络之集群,nginx,负载均衡,防火墙
K8S内容分发网络之集群,nginx,负载均衡,防火墙 一、Kubernetes 区域可采用 Kubeadm 方式进行安装。1.所有节点,关闭防火墙规则,关闭selinux,关闭swap交换2.修改主机名3.所有节点修改hosts文件4.调整内核参数…...
不愧是疑问解决神器!你强任你强
不愧是疑问解决神器!你强任你强👍👍👍 在过去,我习惯用这种方式来阅读书籍或文章:先快速浏览一遍,然后再进行复读,并最终总结所学的知识点。然而,长期以来,我…...

盛最多水的容器 接雨水【基础算法精讲 02】
盛雨水最多的容器 链接 : 11 盛最多水的容器 思路 : 双指针 : 1.对于两条确定的边界,l和r,取中间的线m与r组成容器,如果m的高度>l的高度,那么整个容器的长度会减小,如果低于l的高度,那么不仅高度可…...
之—— 主题的functions.php)
WordPress主题开发( 十二)之—— 主题的functions.php
WordPress主题开发( 十)之—— 主题的functions.php 介绍使用functions.php vs. 插件创建和使用functions.php在functions.php中的常见用途1. 使用WordPress钩子2. 启用WordPress功能3. 定义可重用的函数4. 添加自动Feed链接5. 自定义导航菜单6. 文本域加…...

代码的工厂模式
概念: 代码的工厂模式是一种设计模式,用于创建对象实例而无需直接调用构造函数。它提供了一种更加灵活和可维护的方式来创建对象,尤其是在需要根据不同情况创建不同类型的对象时非常有用。工厂模式隐藏了对象的创建细节,使代码更…...
UE5.1编辑器拓展【一、脚本化资产行为,通知,弹窗,高效复制多个同样的资产】
目录 插件制作 添加新的类:AssetActionUtility 添加新的模块:EditorScriptingUtilities 路径了解 添加debug的头文件 代码【debug.h】内涵注释: 写函数 .h文件 .cpp文件 插件制作 首先第一步是做一个插件:…...

mac openssl 版本到底怎么回事 已解决
在mac 安装node多版本的时候,有可能把原有的 openssl1.1 版本 直接要再一次升级了,无奈的 php环境 编译器是 openssl 1.1 还是 3.0 ,今天来个底朝天的找问题。 brew search openssl 有安装 三个版本。 但是错误提示 是第二个版本。 brew …...

AWS】在EC2上创建root用户,并使用root用户登录
最近有项目需要使用AWS的EC2服务器; 在创建服务器实例之后发现,没有root用户,仔细阅读AWS EC2文档,发现默认是ec2-user用户; 那我们需要创建一个root用户 1.创建 root 用户 注意:必须要要在ec2-user用户下…...

9月24日回顾
1.微程序控制器的组成:指令译码器、微地址寄存器(输出和暂存控制信息),时序电路、最核心的部件是控制存储器(只读ROM组成)—用来存储微指令 2.突发读写:比如说突发地址为8,那么只需…...
Spring注册Bean系列--方法1:@Component
原文网址:Spring注册Bean系列--方法1:Component_IT利刃出鞘的博客-CSDN博客 简介 本文介绍Spring注册Bean的方法:Component。 注册Bean的方法我写了一个系列,见:Spring注册Bean(提供Bean)系列--方法大全_IT利刃出鞘…...
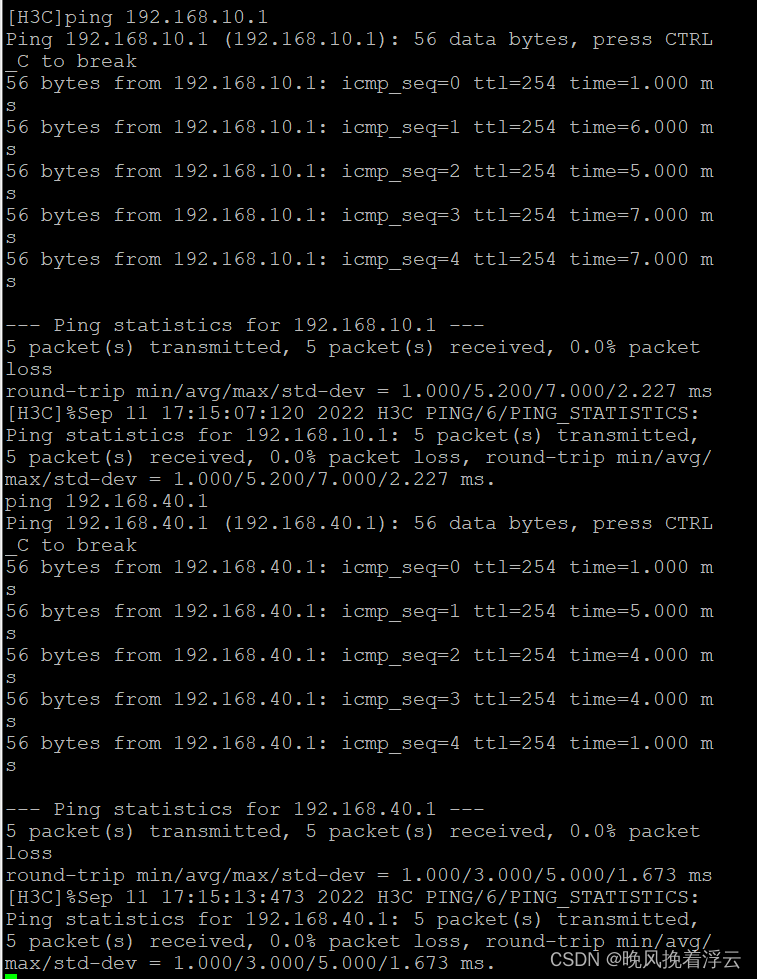
防火墙基础之H3C防火墙和三层交换机链路聚合的配置
H3C防火墙和三层交换机链路聚合的配置 原理概述: 防火墙(英语:Firewall)技术是通过有机结合各类用于安全管理与筛选的软件和硬件设备,帮助计算机网络于其内、外网之间构建一道相对隔绝的保护屏障,以保…...

深度学习从心电信号中解码呼吸频率:原理、实现与临床价值
1. 项目概述:从心电信号中“听”到呼吸声呼吸频率,这个我们每分钟都在进行却很少被精确量化的生命体征,在临床医学中扮演着至关重要的角色。它不仅是评估呼吸系统功能的直接指标,更是反映全身代谢、循环乃至神经系统状态的“窗口”…...

Redis分布式锁进阶第二十篇
一、本篇前置衔接 第二十篇我们完成了全系列终局复盘,整理了故障排查SOP与企业级落地铁律。常规单资源锁、热点分片锁、隔离锁全部讲透,但真实复杂业务永远不是单一资源:下单要扣库存、扣优惠券、扣积分、冻结余额,多资源并行争抢…...

智慧无人机巡检-无人机可见光红外数据集 无人机多模态检测数据集 红外与可见光检测数据集
智慧无人机巡检-无人机可见光红外数据集,已完成标注,可导出各种常用数据集,yolo,voc,coco等格式。可见光33000张,红外16100张,目标一张一个 无人机可见光红外目标数据集项目详细信息数据集名称无…...

电子商务设计师软考备战:特别篇 - 综合模拟与备考策略
1. 考试形式与内容结构1.1 考试基本信息考试科目与时间基础知识考试:上午9:00-11:30(150分钟)应用技术考试:下午2:00-4:30(150分钟)题型与分值分布上午考试(基础知识): -…...

HDI 高密度互连板阶数的深度理解
一、概述高密度互连板(High Density Interconnector, HDI)是通过激光微孔技术和逐层积层工艺实现高密度布线的印制电路板。其阶数划分是行业内统一的技术标准,核心依据为独立积层压合次数与配套激光盲孔制程次数,而非单面层数或钻…...

电信运营商每月处理海量工单,如何不再出错?基于AI Agent的端到端自动化解决方案
在2026年的电信行业,海量工单处理已不再仅仅是效率问题,而是合规与生存的底线。随着2026年5月20日《电信和互联网服务 基础电信企业网上营业厅服务规范》国家标准的正式实施,监管层对“信息透明、流程闭环、计费精准”的要求达到了前所未有的…...

phpMyAdmin CVE-2018-12613:从文件读取到RCE的伪协议利用链
1. 这个漏洞不是“能读文件”那么简单,而是后台权限的彻底失守phpMyAdmin 4.8.1里那个CVE-2018-12613,很多人扫到就报个“存在文件包含”,顺手贴个?targetphp://filter/convert.base64-encode/resource/etc/passwd截图完事。我去年在给一家教…...

3分钟开启PC游戏分屏派对:NucleusCoop让单机游戏秒变多人同屏神器
3分钟开启PC游戏分屏派对:NucleusCoop让单机游戏秒变多人同屏神器 【免费下载链接】nucleuscoop Starts multiple instances of a game for split-screen multiplayer gaming! 项目地址: https://gitcode.com/gh_mirrors/nu/nucleuscoop 还在为热门PC游戏不支…...

php有什么版本,php语言有几个版本
php有什么版本,php语言有几个版本PHP的大版本主要分四支:PHP4/PHP5/PHP6/PHP7 其中,PHP4由于太古老、对OO支持不力已基本被淘汰,请无视PHP4。 PHP6由于基本没有生产线上的应用,还基本只是一款概念产品,很多功能已在PHP…...

通过Taotoken标准OpenAI协议实现分钟级集成现有代码
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken标准OpenAI协议实现分钟级集成现有代码 1. 迁移背景与核心思路 许多开发团队在构建AI应用时,会直接使用O…...