V4L2 驱动架构介绍
V4L2 简介
Video for Linux two(Video4Linux2)简称 V4L2,是 V4L 的改进版。V4L2 是 linux操作系统下用于视频和音频数据采集设备的驱动框架,为驱动和应用程序提供了一套统一的接口规范。
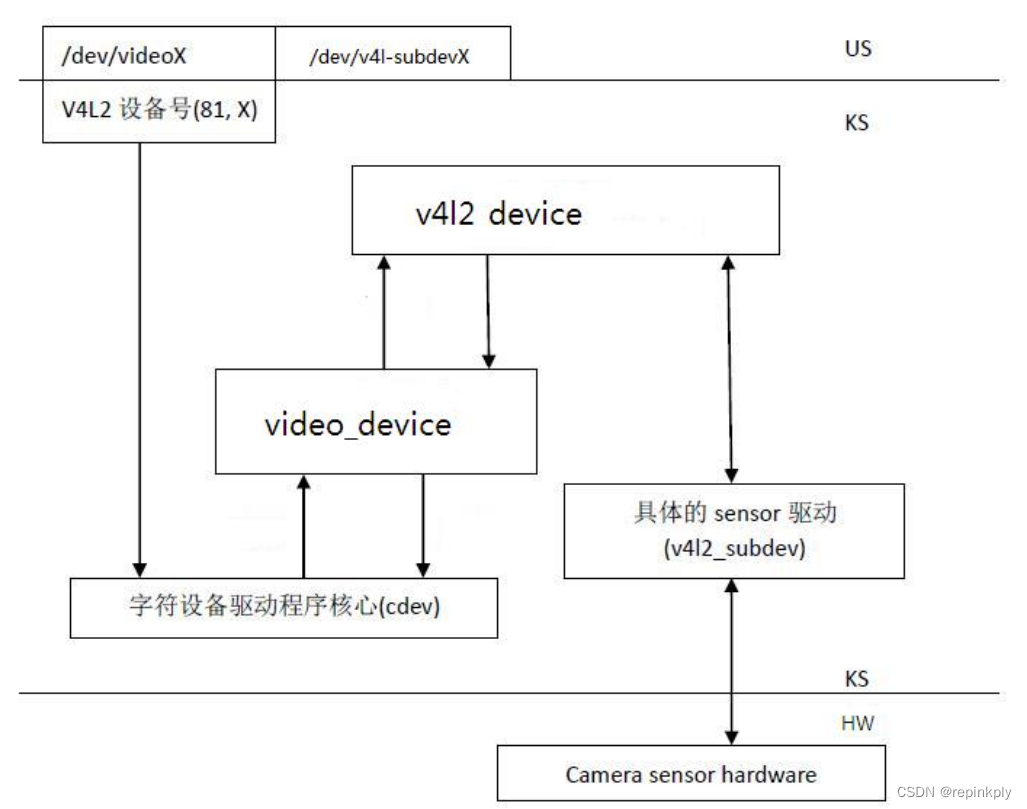
在 Linux 下,所有外设都被看成一种特殊的文件,成为“设备文件”,可以象访问普通文件一样对其进行读写。采用 V4L2 驱动的摄像头设备文是/dev/videoX以及一些子设备/dev/v4l-subdevX。V4L2 支持两种方式来采集图像:内存映射方式(mmap)和直接读取方式(read)。应用层通过 open/ioctl/close 等函数来操作V4L2 设备文件的方式控制 camera 设备。
V4L2 支持的设备:
- Video capture device : 从摄像头等设备上获取视频数据。对很多人来讲,video capture 是 V4L2 的基本应用。设备名称为/dev/video,主设备号 81,子设备号 0~63
- Video output device : 将视频数据编码为模拟信号输出。与 video capture 设备名相同。
- Video overlay device : 将同步锁相视频数据(如 TV)转换为 VGA 信号,或者将抓取的视频数据直接存放到视频卡的显存中。
- Video output overlay device :也被称为 OSD(On-Screen Display)
- VBI device : 提供对 VBI(Vertical Blanking Interval)数据的控制,发送 VBI 数据或抓取 VBI 数据。设备名/dev/vbi0~vbi31,主设备号 81,子设备号 224~255
- Radio device : FM/AM 发送和接收设备。设备名/dev/radio0~radio63,主设备号81,子设备号 64~127
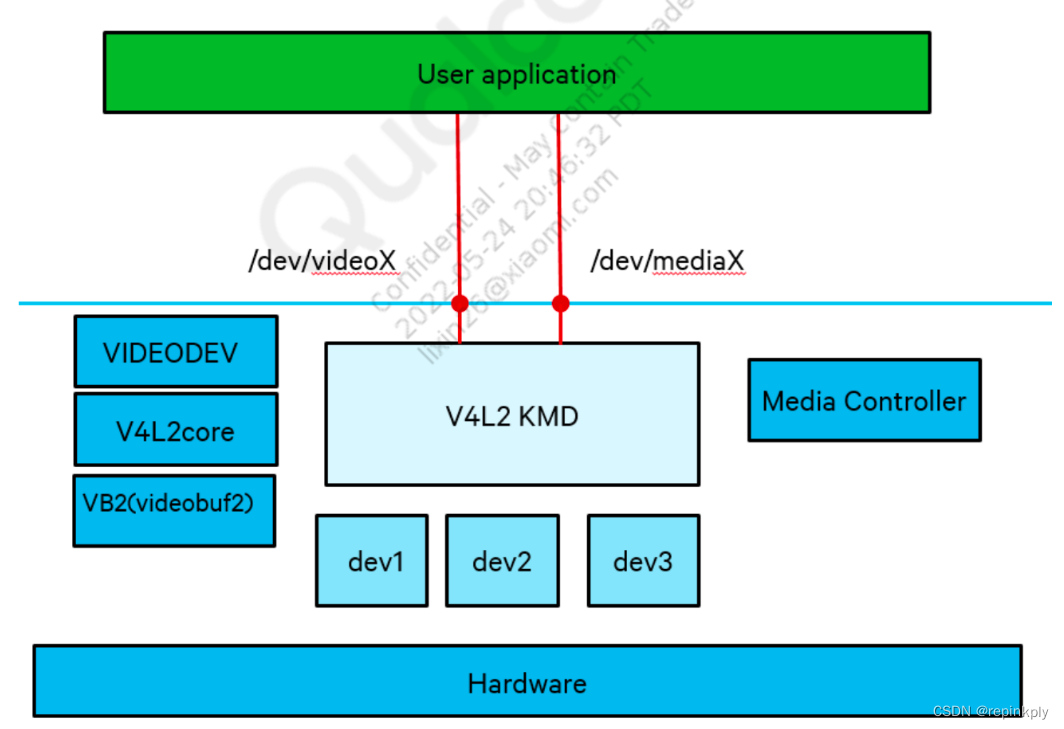
V4L2 架构总览
总体架构图
CRM 根设备
CRM 即 camera request manager,创建了 V4L2 根设备/dev/video0,供所有子设备注册。
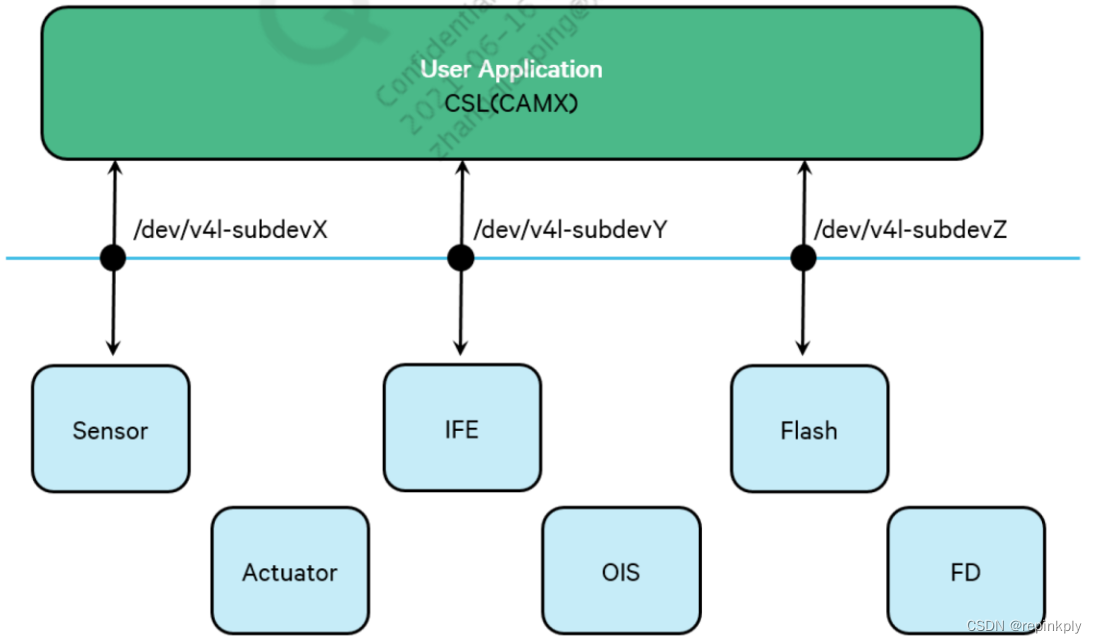
V4L2 子设备
每个子设备实现特定功能,如音视频混合,编解码等。对于 camera,有如下子设备:
SENSOR, IFE, ICP, LRME, JPEG, FD, CPAS, CSIPHY, ACTUATOR, CCI, FLASH,EEPROM, OIS 等。
通过设备文件/dev/v4l-subdevX 供应用层(CSL)调用其功能。
V4L2 驱动层实现
V4L2 驱动架构
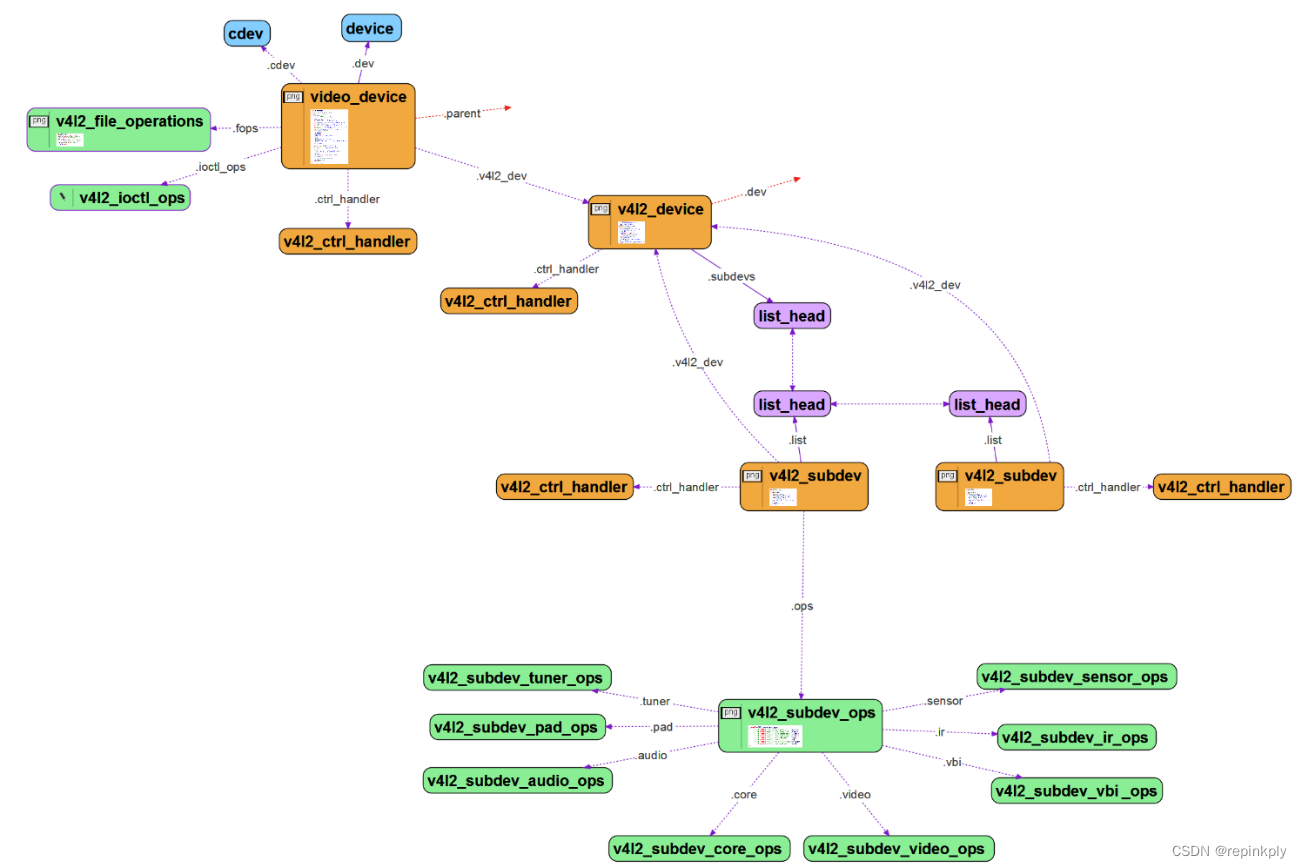
几个重要的结构体
- video_device:保存 V4L2 的 device node 数据。
- v4l2_device:表示一个 v4l2 设备,各个子设备都挂在这个结构体里面。
- v4l2_subdev:每个子设备都有一个实例。
Kernel V4l2 的文档:
https://www.kernel.org/doc/html/v4.9/media/kapi/v4l2-core.html
驱动主要实现的功能
- 具体硬件的控制代码
- 实现 V4L2 架构相关结构体与函数
- 将代码(结构体与函数)与 V4L2 框架绑定
要实现的主要结构体
struct video_device
主要的任务就是负责向内核注册字符设备。
此结构体既可以动态分配,也可以嵌入到一个更大的结构体中。
动态分配方法如下:
struct video_device *vdev = video_device_alloc();
if (vdev == NULL)return -ENOMEM;
vdev->release = video_device_release;也可嵌入到一个大结构体中,此时要实现 release()回调:
struct video_device *vdev = &my_vdev->vdev;
vdev->release = my_vdev_release;设置结构体主要域:
- v4l2_dev: 设置为 v4l2_device 父设备。
- name: 设置为唯一的描述性设备名。
- fops: 设置为已有的 v4l2_file_operations 结构体。实现文件操作。设置 .unlocked_ioctl 指向 video_ioctl2。请勿使用 .ioctl!它已被废弃。
- ioctl_ops: 一般设为 v4l2_ioctl_ops 来简化 ioctl 的维护。
- lock: 如果你要在驱动中实现所有的锁操作,则设为 NULL 。否则就要设置一个指向 struct mutex_lock 结构体的指针,这个锁将在 unlocked_ioctl 文件操作被调用前由内核获得,并在调用返回后释放。详见下一节。
- prio: 保持对优先级的跟踪。用于实现 VIDIOC_G/S_PRIORITY。如果设置为 NULL,则会使用 v4l2_device 中的 v4l2_prio_state 结构体。如果要对每个设备节点(组)实现独立的优先级,可以将其指向自己实现的 v4l2_prio_state 结构体。
注册视频设备:
err = video_register_device(vdev, VFL_TYPE_VIDEO, -1);
if (err) {video_device_release(vdev); /* or kfree(my_vdev); */return err;
}这个操作会创建一个字符设备
注销设备:
video_unregister_device(vdev);这个操作将从 sysfs 中移除设备节点(导致 udev 将其从 /dev 中移除)。
struct v4l2_device
struct v4l2_device:一个硬件设备可能包含多个子设备,比如 camera 包含 sensor 设备,actuator 设备,flash 设备等。而 v4l2_device 就是所有这些设备的根节点,负责管理所有的子设备。
简单设备可以仅分配这个结构体,但在大多数情况下,都会将这个结构体嵌入到一个更大的结构体中。
注册这个设备实例:
v4l2_device_register(struct device *dev, struct v4l2_device *v4l2_dev);注销 v4l2_device 使用如下函数:
v4l2_device_unregister(struct v4l2_device *v4l2_dev);struct v4l2_subdev
struct v4l2_subdev:子设备,负责实现具体的功能。
子设备驱动可使用如下函数初始化 v4l2_subdev 结构体:
v4l2_subdev_init(sd, &ops);向 v4l2_device 注册 v4l2_subdev:
int err = v4l2_device_register_subdev(v4l2_dev, sd);注销子设备则可用如下函数:
v4l2_device_unregister_subdev(sd);此后,子设备模块就可卸载,且 sd->dev == NULL。
要实现的主要函数
video_device->v4l2_file_operations
实现文件类操作,比如 open,close,read,write,mmap 等。但是 ioctl 是不需要实现的,一般都是用 video_ioctl2 代替。
.unlocked_ioctl = video_ioctl2,
video_device->v4l2_ioctl_ops
V4L2 导出给应用层使用的所有 ioctl。只要实现需要用的,如:
v4l2_subdev->v4l2_subdev_ops 及其子函数:
必须实现的:
v4l2_subdev_core_ops
其它可按需选择,如:
v4l2_subdev_video_ops

V4L2 应用层实现
V4L2 是一个字符设备,通过设备文件向应用层提供各种功能。应用层可以像操作普通文件一样 open/close V4L2 设备文件,而 V4L2 的大部分功能都是通过设备文件的 ioctl 导出的。
IOCTL 命令分类
功能查询相关

优先级相关

视频捕获相关


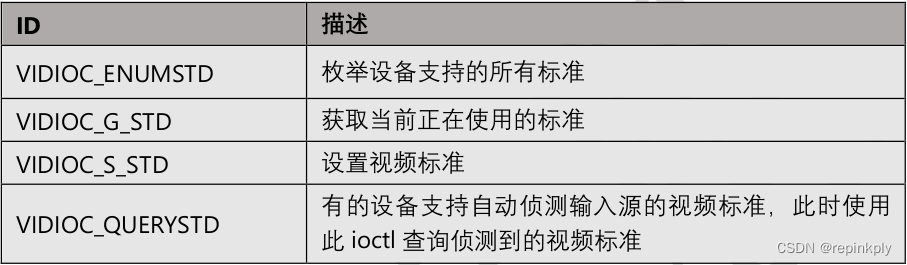
TV 视频相关
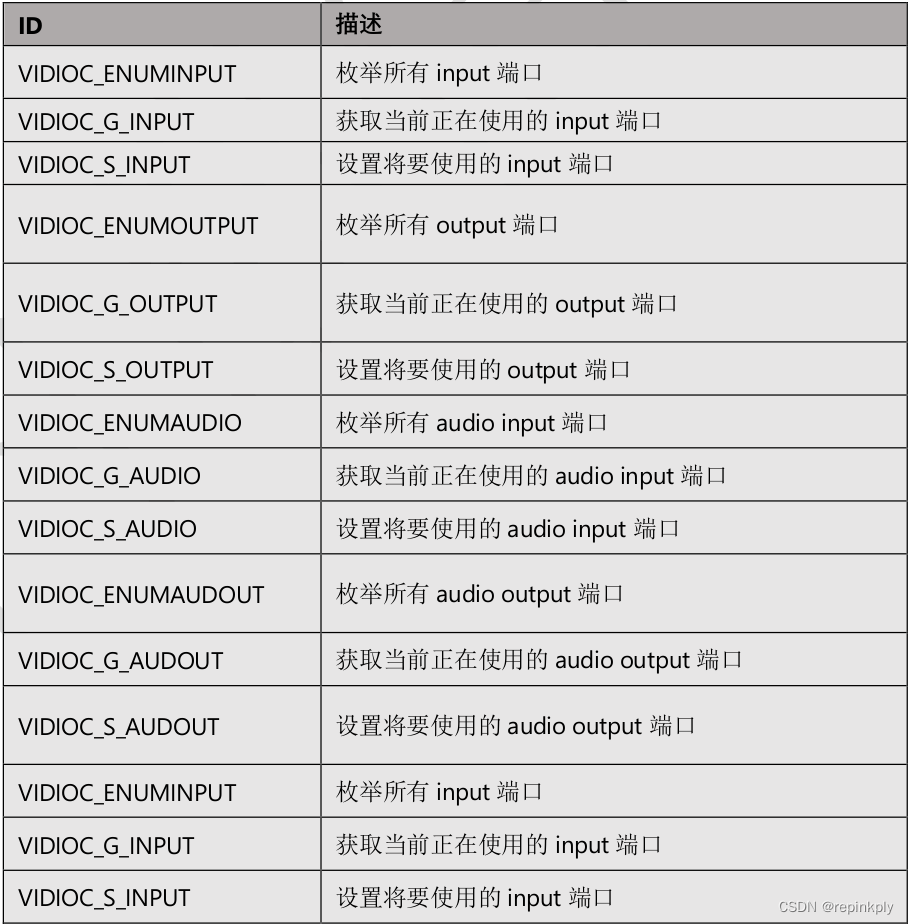
输入输出相关
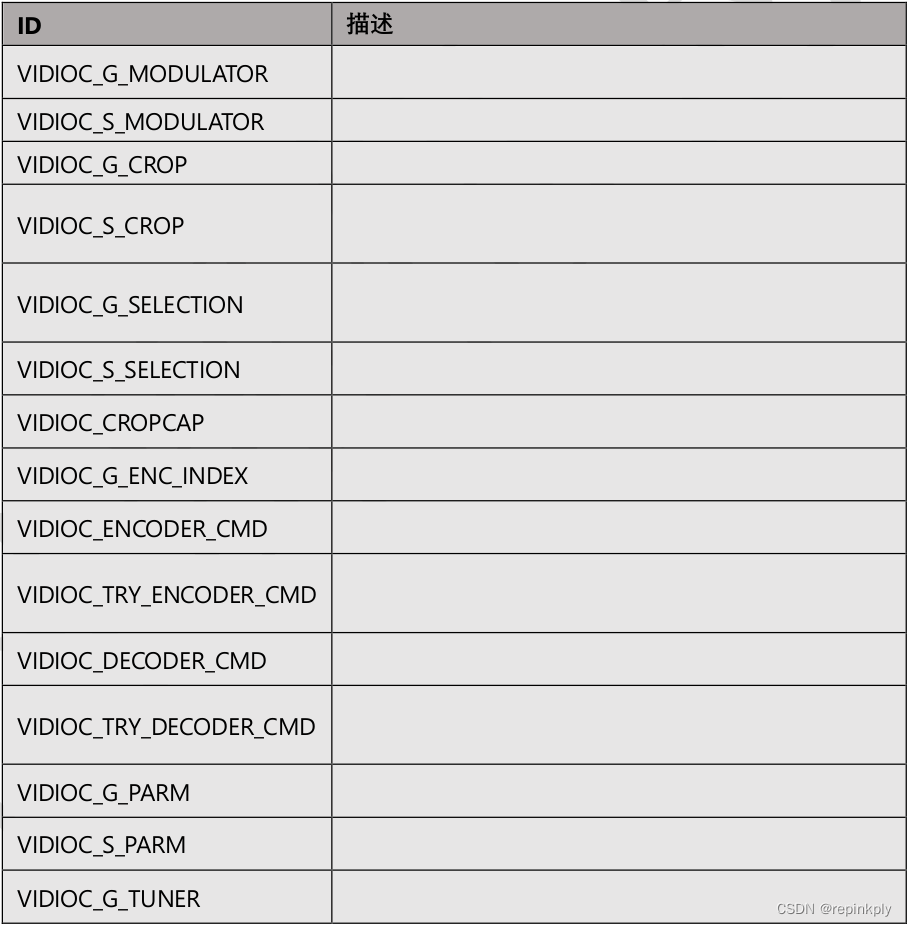
控制相关

杂项
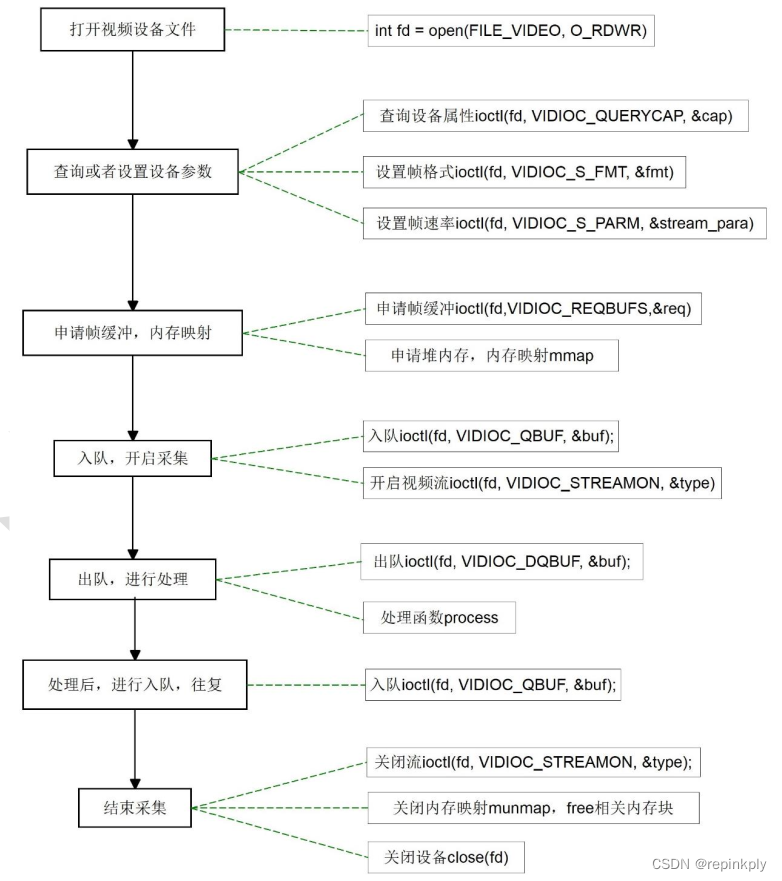
V4l2 设备的基本操作流程
- 打开并获取设备属性
- 设置帧格式
- 设置帧缓冲
- 开始进行视频流采集
- 停止采集关闭设备
高通平台 V4L2 架构实现
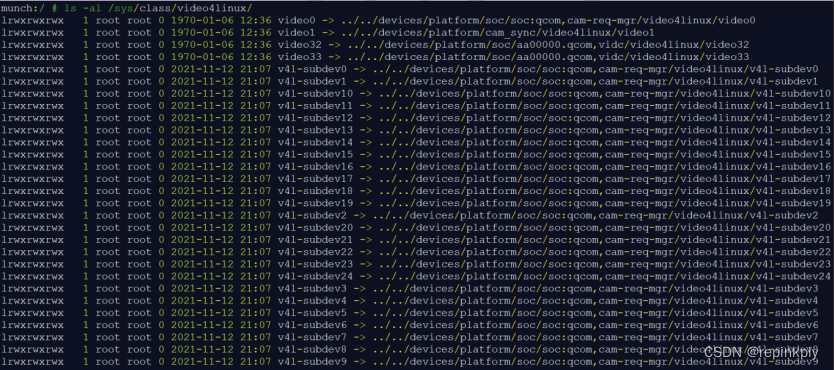
驱动层实现
驱动对应用层提供的设备节点,V4L2 相关设备文件:
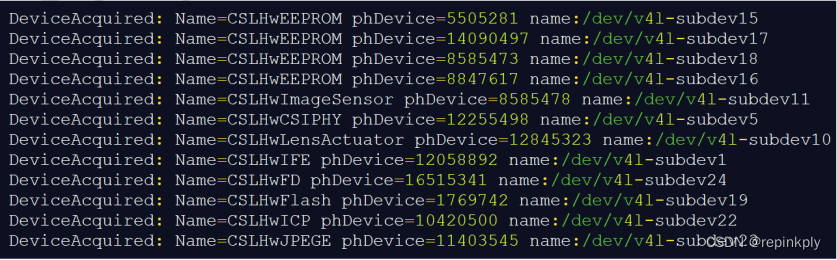
其中部分子设备类型如下:
//未完待续...
相关文章:
V4L2 驱动架构介绍
V4L2 简介 Video for Linux two(Video4Linux2)简称 V4L2,是 V4L 的改进版。V4L2 是 linux操作系统下用于视频和音频数据采集设备的驱动框架,为驱动和应用程序提供了一套统一的接口规范。 在 Linux 下,所有外设都被看成一种特殊的文件…...
掌握这些技巧,让Excel批量数据清洗变得简单高效!
什么是数据清洗 数据清洗是指在数据处理过程中对原始数据进行筛选、转换和修正,以确保数据的准确性、一致性和完整性的过程。它是数据预处理的一部分,旨在处理和纠正可能存在的错误、缺失值、异常值和不一致性等数据质量问题。 为什么要数据清洗 Exce…...

成都瀚网科技:抖音上线地方方言自动翻译功能
为了让很多方言的地域历史、文化、习俗能够以短视频的形式生产、传播和保存,解决方言难以被更多用户阅读和理解的问题,平台正式上线推出当地方言自动翻译功能。创作者可以利用该功能,将多个方言视频“一键”转换为普通话字幕供大众观看。 具体…...

【k8s】【docker】web项目的部署
yaml配置文件 后端:springboot项目 前端:vue项目,之前镜像封装的nginx.conf反向代理配置直接使用了docker-compose.yml中services的名称,无法代理成功,可修改为127.0.0.1 # 后端 apiVersion: apps/v1 kind: Deployment…...
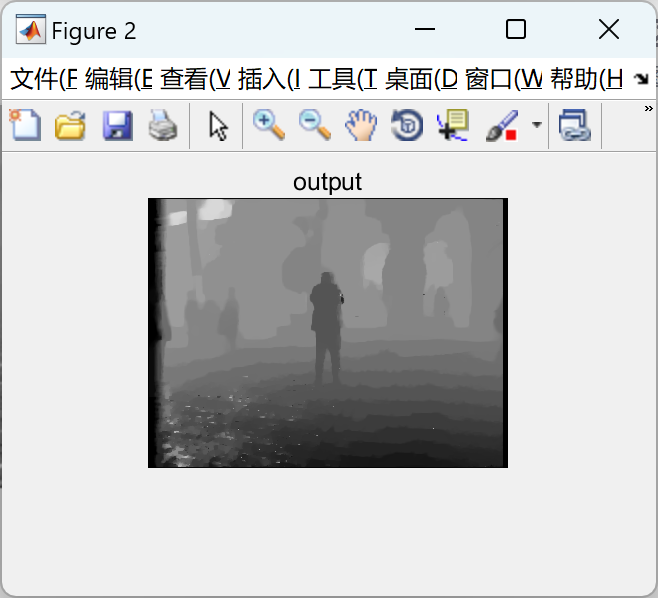
【视频去噪】基于全变异正则化最小二乘反卷积是最标准的图像处理、视频去噪研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...


链表经典面试题(六)
判断链表是否有环 1.题目2.思路分析(文字)3.详细的注释和代码实现 1.题目 2.思路分析(文字) 3.详细的注释和代码实现 public class Solution {public boolean hasCycle(ListNode head) {//定义两个快慢指针ListNode fast head;ListNode slow head;//让快指针走两步,慢指针走…...

SM2签名算法中随机数K的随机性对算法安全的影响
一、构造如下SM2签名算法过程1 Sig1 r1 F2BFC778C66127C74E3613FAA1AB6E207059740B317597A78BBFCDF58AED0A51 Sig1 s1 4FC719D00334CCC23098036DEEAA71DB464A076EFA79283389D3414D70659E88 私钥d B3124DC843BB8BA61F035A7D0938251F5DD4CBFC…...

郁金香2021年游戏辅助技术中级班(六)
郁金香2021年游戏辅助技术中级班(六) 055-ce,xdbg调试分析接任务交任务完成任务056-C,C写代码测试接任务交任务完成任务我们再来分析一下完成任务 057-C,C写代码测试交任务完成任务 055-ce,xdbg调试分析接任务交任务完成任务 创建一个新角色,…...

毛玻璃员工卡片悬停效果
效果展示 页面结构组成 通过效果展示图,我们可以看出页面布局比较常规,最核心的就是卡片,当鼠标没有悬停在卡片上时,文字和头像处于半透明状态,当鼠标悬停在卡片上是,底部会展示社交图标。 CSS 知识点 b…...
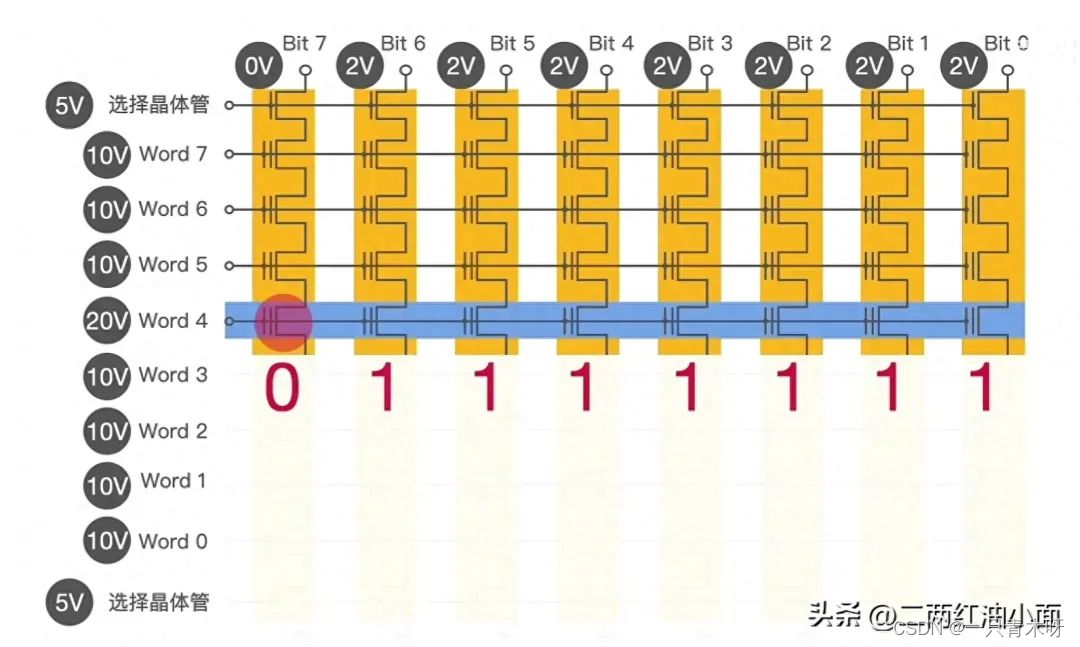
闪存工作原理
前言 1、闪存类型 闪存有两种分类,NAND型闪存主要用于存储 2、MOS的特性 MOS管的三个引脚分别是Gate(G)、Source(S)和Drain(D)。Gate(G)引脚是晶闸管的控制引脚&…...

从0到一配置单节点zookeeper
我的软件: 链接:https://pan.baidu.com/s/1nImkjOgzPkgaFOuUPwd1Sg?pwd2wqo 提取码:2wqo 视频教程p1-zookeeper安装和配置以及启动服务和检测是否运行成功_哔哩哔哩_bilibili 一、安装zookeeper http://zookeeper.apache.org/releases.h…...
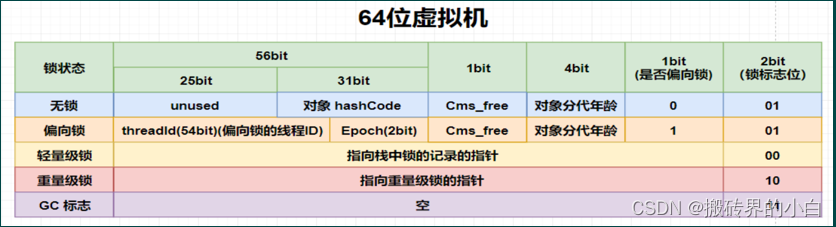
【JVM】第三篇 JVM对象创建与内存分配机制深度剖析
目录 一. JVM对象创建过程详解1. 类加载检查2. 分配内存2.1 如何划分内存?2.2 并发问题3. 初始化4. 设置对象头5. 执行<init>方法二. 对象头和指针压缩详解三. JVM对象内存分配详解四.逃逸分析 & 栈上分配 & 标量替换详解1. 逃逸分析 & 栈上分配2. 标量替换…...
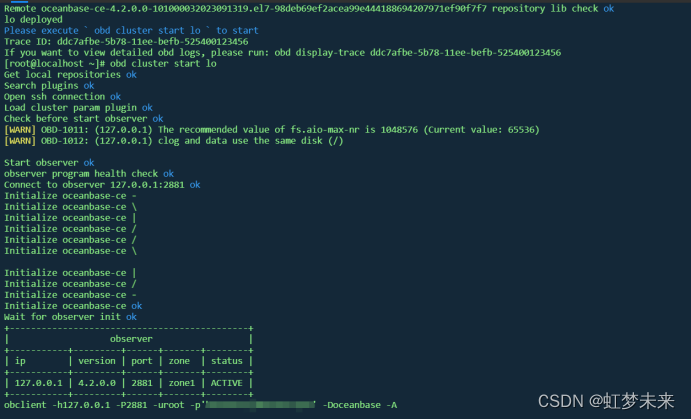
【信创】麒麟v10(arm)-mysql8-mongo-redis-oceanbase
Win10/Win11 借助qume模拟器安装arm64麒麟v10 前言 近两年的国产化进程一直在推进,基于arm架构的国产系统也在积极发展,这里记录一下基于麒麟v10arm版安装常见数据库的方案。 麒麟软件介绍: 银河麒麟高级服务器操作系统V10 - 国产操作系统、银河麒麟、中…...
)
maven settings.xml文件(包含了配置阿里云镜像)
mac 的 settings.xml 我配置的位置是: /Applications/IntelliJ IDEA.app/Contents/plugins/maven/lib/maven3/conf/settings.xml 然后 local repository 我配置的位置是: /Applications/IntelliJ IDEA.app/Contents/plugins/maven/lib/maven3/conf/repos…...

分类预测 | MATLAB实现WOA-FS-SVM鲸鱼算法同步优化特征选择结合支持向量机分类预测
分类预测 | MATLAB实现WOA-FS-SVM鲸鱼算法同步优化特征选择结合支持向量机分类预测 目录 分类预测 | MATLAB实现WOA-FS-SVM鲸鱼算法同步优化特征选择结合支持向量机分类预测效果一览基本介绍程序设计参考资料 效果一览 基本介绍 MATLAB实现WOA-FS-SVM鲸鱼算法同步优化特征选择结…...
Redis是否要分库的实践
Redis的分库其实没有带来任何效率上的提升,只是提供了一个命名空间,而这个命名空间可以完全通过key的设计来避开这个问题。 一个优雅的Redis的key的设计如下...
String 进阶
字符串拼接 // 常量与常量的拼接结果放在常量池 // 常量池中不会存在相同的常量 String str1 "a" "b"; System.out.println(str1 "ab");// 拼接时有一个为变量,则结果会放在堆中。 // 变量拼接的原理是 StringBuilder append 最后…...

ESP32设备通信-两个ESP32间UART通信
两个ESP32间UART通信 文章目录 两个ESP32间UART通信1、UART介绍2、软件准备3、硬件准备4、代码实现在本文中,我们将使用 Arduino IDE 的 UART 硬件库在两个 ESP32 板之间执行 UART 或串行通信。 要使用 USB 端口调试和编程 ESP32,需要使用称为通用异步接收器/发送器 (UART) 通…...

LCR 052.递增顺序搜索树
题目来源: leetcode题目,网址:LCR 052. 递增顺序搜索树 - 力扣(LeetCode) 解题思路: 中序遍历时修改指针即可。 解题代码: /*** Definition for a binary tree node.* public class TreeNo…...

深入解析Keil MDK编译流程:从C代码到单片机运行的完整过程
1. 项目概述:从源码到芯片运行的旅程作为一名在嵌入式领域摸爬滚打了十多年的老工程师,我经常被问到这样一个问题:“我写的C代码,点一下MDK的‘Build’按钮,怎么就变成能在单片机里跑的程序了?” 这背后&am…...

2026墙体广告供应商亲测靠谱!
行业痛点分析墙体广告领域面临着诸多核心技术挑战。传统户外大牌、短视频投放费用高昂,单次投放曝光有限,数据表明,下沉市场触达成本居高不下,中小品牌难以承担长期投放。城市广告无法渗透乡镇、农村等下沉市场,目标客…...

暗黑3终极宏工具D3KeyHelper:5分钟配置你的自动战斗系统
暗黑3终极宏工具D3KeyHelper:5分钟配置你的自动战斗系统 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper D3KeyHelper是一款专为暗黑破坏神…...

MindCluster集群调度实践-通用超节点调度算法
作者:昇腾实战派 一、超节点的重要性 随着模型参数量的上升,训练任务运行所需的芯片数量也达到了万卡、十万卡级别。如何将如此庞大的芯片链接起来,并且做到通信带宽和成本的平衡,成为硬件层面的一大难题。 图1.资源扩展方式示…...

给硬件工程师的芯片FT测试入门:从ATE、Handler到Socket,一次搞懂所有‘治具’
芯片FT测试全流程实战指南:从设备选型到治具配置 第一次走进芯片测试车间时,我被眼前那些闪烁着信号灯的庞大设备和精密治具震撼到了。作为硬件工程师,我们可能更熟悉PCB设计和电路仿真,但当芯片进入量产阶段,如何确保…...

正交张量、正定张量与材料稳定性:在有限元分析ABAQUS中的实际应用与参数设置
正交张量、正定张量与材料稳定性:在有限元分析ABAQUS中的实际应用与参数设置 当工程师在ABAQUS中遇到材料刚度矩阵非正定警告时,往往意味着仿真结果可能失去物理意义。这种警告背后隐藏着深刻的张量数学原理——正定张量的性质直接决定了材料本构模型的稳…...

MCP39F501电能计量芯片:高精度单相计量方案与工程实践详解
1. 项目概述:为什么我们需要一颗专用的电能计量芯片?在智能家居、工业物联网和新能源领域,精确测量交流电(AC)的用电参数——比如电压、电流、功率、电能——是底层最核心的需求之一。你可能觉得,用个高精度…...

CANN/cannbot-skills模型推理融合算子优化
【免费下载链接】cannbot-skills CANNBot 是面向 CANN 开发的用于提升开发效率的系列智能体,本仓库为其提供可复用的 Skills 模块。 项目地址: https://gitcode.com/cann/cannbot-skills name: model-infer-fusion description: 基于 PyTorch 框架的昇腾 NPU…...

不止.htaccess:盘点文件上传漏洞中那些‘借壳’执行的奇技淫巧
文件上传漏洞中的"借壳"执行艺术:超越.htaccess的攻防博弈 在Web安全领域,文件上传功能就像一扇半开的门——它为用户提供便利的同时,也为攻击者创造了可乘之机。当开发者试图通过简单的黑名单过滤来阻挡恶意文件时,攻击…...
)
别再让一条宽带拖慢整个公司!手把手教你用H3C防火墙配置双WAN口负载均衡(附HCL模拟器配置)
中小企业网络优化实战:H3C防火墙双WAN负载均衡配置指南 当视频会议频繁卡顿、文件传输速度像蜗牛爬行时,单条宽带已成为制约企业效率的瓶颈。对于50-200人规模的中小企业,双WAN负载均衡技术能以极低成本实现带宽翻倍,本文将用一台…...