【解决方案】‘create’ is not a member of ‘cv::aruco::DetectorParameters’
‘create’ is not a member of ‘cv::aruco::DetectorParameters’
在构建AruCo标定板标定位姿代码的过程中,发现代码中认为create并不是aruco::DetectorParameters的成员函数,这是因为在4.7.0及以上的OpenCV版本中,对ArUco的代码做调整,删去create函数。
解决方法是安装OpenCV3的代码,我选择的是opencv3.4.13的版本。build成功之后就可以正常使用了。
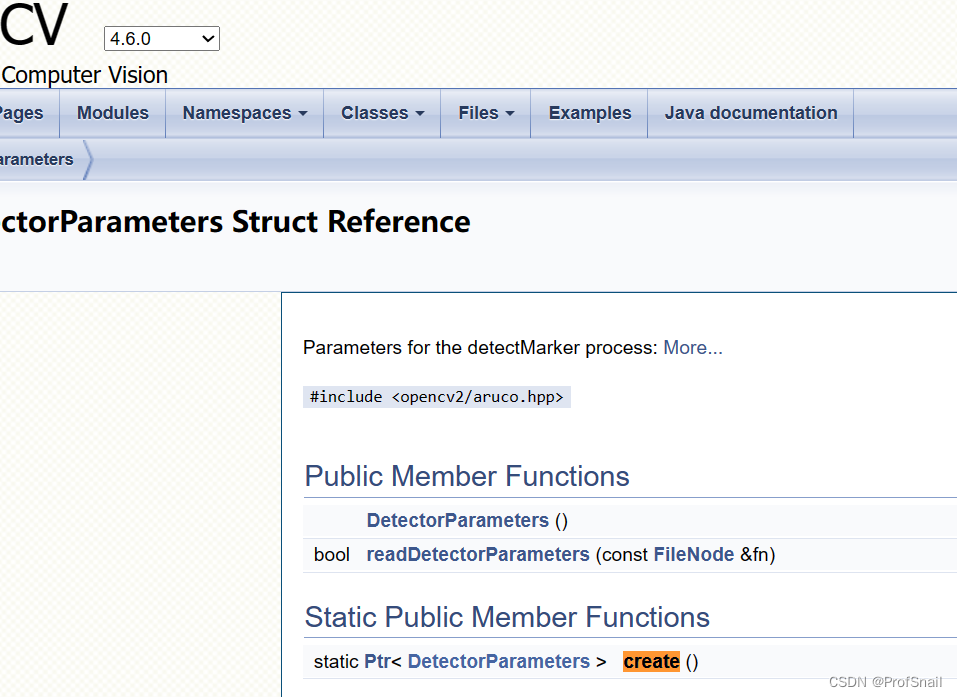
【4.6.0及以前的OpenCV是有create函数的】

【4.7.0没有create函数】
如何在Ubuntu环境下安装OpenCV,通过Build源码的形式?参见OpenCV的官方文档Installation in Linux:
# Install minimal prerequisites (Ubuntu 18.04 as reference)
sudo apt update && sudo apt install -y cmake g++ wget unzip
# Download and unpack sources
wget -O opencv.zip https://github.com/opencv/opencv/archive/4.x.zip
wget -O opencv_contrib.zip https://github.com/opencv/opencv_contrib/archive/4.x.zip
unzip opencv.zip
unzip opencv_contrib.zip
# Create build directory and switch into it
mkdir -p build && cd build
# Configure
cmake -DOPENCV_EXTRA_MODULES_PATH=../opencv_contrib-3.4/modules ../opencv-3.4.13
# Build
cmake --build . -j4这里注意,如果wget无法下载,要自己手动下载3.4.13的OpenCV及contrib安装包:
https://github.com/opencv/opencv/archive/3.4.13.zip
https://github.com/opencv/opencv_contrib/archive/3.4.zip
我将上述的build文件放在/home/ProfSnail/software/opencv3.4.13/build下面,在使用CMakeLists.txt的时候,要指定路径。比如:
project(PieceSeg)
cmake_minimum_required(VERSION 3.0)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_BUILD_TYPE Release)set(OpenCV_DIR /home/ProfSnail/software/opencv3.4.13/build)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})add_executable(calibration calibration.cpp)
target_link_libraries(calibration ${OpenCV_LIBS} cnpy)
相关文章:
【解决方案】‘create’ is not a member of ‘cv::aruco::DetectorParameters’
‘create’ is not a member of ‘cv::aruco::DetectorParameters’ 在构建AruCo标定板标定位姿代码的过程中,发现代码中认为create并不是aruco::DetectorParameters的成员函数,这是因为在4.7.0及以上的OpenCV版本中,对ArUco的代码做调整&…...
)
门牌制作(蓝桥杯)
门牌制作 题目描述 本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。 小蓝要为一条街的住户制作门牌号。 这条街一共有 2020 位住户,门牌号从 1 到 2020 编号。 小蓝制作门牌的方法是先制作 0 到 9 这几个数字字…...

支付宝支付模块开发
生成二维码 使用Hutool工具类生成二维码 引入对应的依赖 <dependency><groupId>cn.hutool</groupId><artifactId>hutool-all</artifactId><version>5.7.5</version> </dependency><dependency><groupId>com.go…...

12、Kubernetes中KubeProxy实现之iptables和ipvs
目录 一、概述 二、iptables 代理模式 三、iptables案例分析 四、ipvs案例分析 一、概述 iptables和ipvs其实都是依赖的一个共同的Linux内核模块:Netfilter。Netfilter是Linux 2.4.x引入的一个子系统,它作为一个通用的、抽象的框架,提供…...

从0开始python学习-29.selenium 通过cookie信息进行登录
1. 手动输入cookie信息保持登录状态 url https://test.com/login driver.get(url) # 手动将cookie信息写入(有多个的情况需要分开写入)--弊端为需要每次都手动输入,很麻烦不适用 driver.add_cookie({"name": "SIAM_IMAGE_…...

CentOS安装OpenNebula(二)
被控端部署: 先要配置好yum源: [rootmaster yum.repos.d]# vim opennebula.repo[rootmaster yum.repos.d]# cat opennebula.repo [opennebula] nameopennebula baseurlhttps://downloads.opennebula.org/repo/5.6/CentOS/7/x86_64 enabled1 gpgkeyhttps…...

力扣第239题 c++滑动窗口经典题 单调队列
题目 239. 滑动窗口最大值 困难 提示 队列 数组 滑动窗口 单调队列 堆(优先队列) 给你一个整数数组 nums,有一个大小为 k 的滑动窗口从数组的最左侧移动到数组的最右侧。你只可以看到在滑动窗口内的 k 个数字。滑动窗口每次只向右移动一位。 返回 滑动窗口中的…...
华为云云耀云服务器L实例评测|华为云云耀云服务器docker部署srs,可使用HLS协议
华为云云耀云服务器L实例评测|华为云云耀云服务器docker部署srs,可使用HLS协议 什么是华为云云耀云L实例 云耀云服务器L实例,面向初创企业和开发者打造的全新轻量应用云服务器。提供丰富严选的应用镜像,实现应用一键部署&#x…...

jira流转issue条目状态transitions的rest实用脚本,issue状态改变调整
官方文档链接地址: POST Transition issue Performs an issue transition and, if the transition has a screen, updates the fields from the transition screen. sortByCategory To update the fields on the transition screen, specify the fields in the fiel…...

JAVA 注解
1 概念 Annotation(注解)是 Java 提供的一种对元程序中元素关联信息和元数据(metadata)的途径和方法。Annatation(注解)是一个接口,程序可以通过反射来获取指定程序中元素的 Annotation 对象,然后通过该 An…...
C++面试题准备
文章目录 一、线程1.什么是进程,线程,彼此有什么区别?2.多进程、多线程的优缺点3.什么时候用进程,什么时候用线程4.多进程、多线程同步(通讯)的方法5.父进程、子进程的关系以及区别6.什么是进程上下文、中断上下文7.一…...

使用Java操作Redis
要在Java程序中操作Redis可以使用Jedis开源工具。 一、jedis的下载 如果使用Maven项目,可以把以下内容添加到pom中 <!-- https://mvnrepository.com/artifact/redis.clients/jedis --> <dependency> <groupId>redis.clients</groupId>…...

VRRP配置案例(路由走向分析,端口切换)
以下配置图为例 PC1的配置 acsw下行为access口,上行为trunk口, 将g0/0/3划分到vlan100中 <Huawei>sys Enter system view, return user view with CtrlZ. [Huawei]sysname acsw [acsw] Sep 11 2023 18:15:48-08:00 acsw DS/4/DATASYNC_CFGCHANGE:O…...
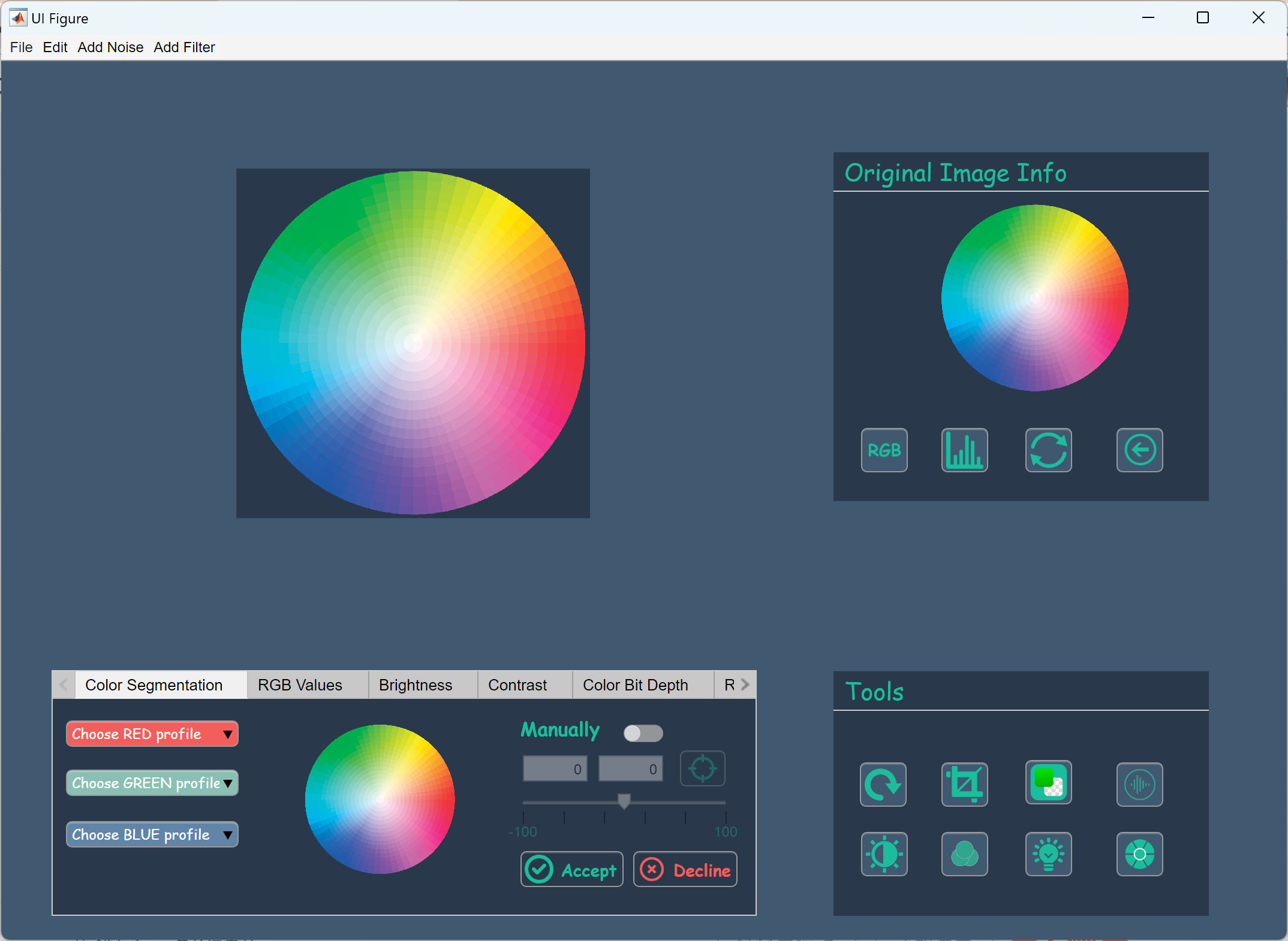
【图像处理】【应用程序设计】加载,编辑和保存图像数据、图像分割、色度键控研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
05. 机器学习入门 - 动态规划
文章目录 从一个案例开始动态规划 Hi, 你好。我是茶桁。 咱们之前的课程就给大家讲了什么是人工智能,也说了每个人的定义都不太一样。关于人工智能的不同观点和方法,其实是一个很复杂的领域,我们无法用一个或者两个概念确定什么是人工智能&a…...
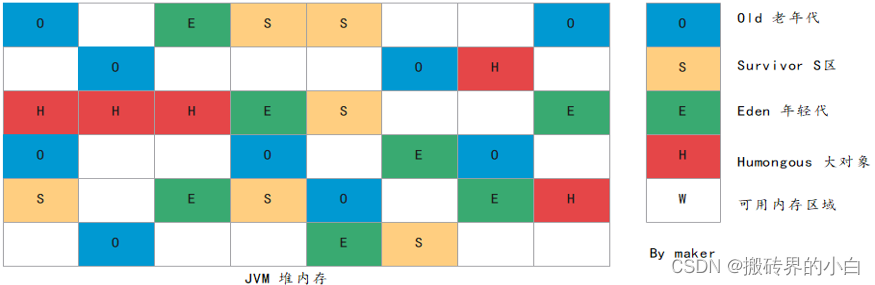
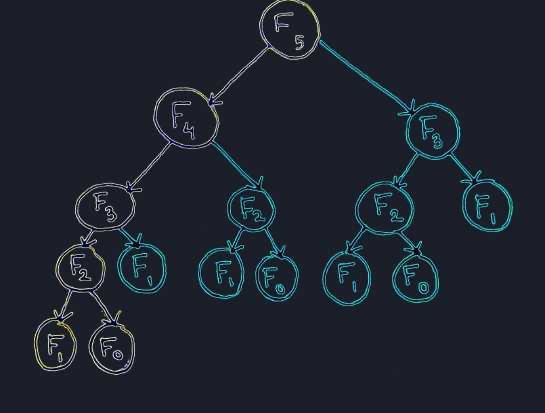
【JVM】第五篇 垃圾收集器G1和ZGC详解
导航 一. G1垃圾收集算法详解1. 大对象Humongous说明2. G1收集器执行一次GC运行的过程步骤3. G1垃圾收集分类4. G1垃圾收集器参数设置5. G1垃圾收集器的优化建议6. 适合使用G1垃圾收集器的场景?二. ZGC垃圾收集器详解1. NUMA与UMA2. 颜色指针3. ZGC的运作过程4. ZGC垃圾收集器…...
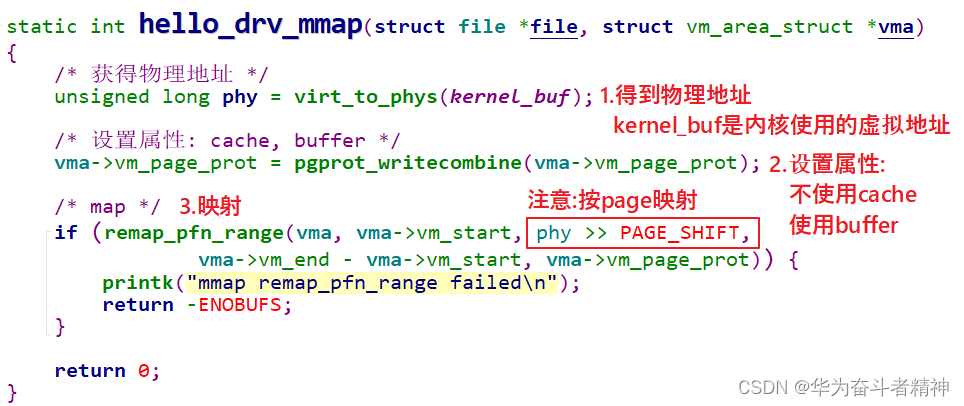
嵌入式Linux应用开发-基础知识-第十九章驱动程序基石⑤
嵌入式Linux应用开发-基础知识-第十九章驱动程序基石⑤ 第十九章 驱动程序基石⑤19.9 mmap19.9.1 内存映射现象与数据结构19.9.2 ARM架构内存映射简介19.9.2.1 一级页表映射过程19.9.2.2 二级页表映射过程 19.9.3 怎么给APP新建一块内存映射19.9.3.1 mmap调用过程19.9.3.2 cach…...

数据分析技能点-独立性检验拟合优度检验
在这个数据驱动的时代,数据分析已经成为了一个不可或缺的工具,无论是在商业决策、医疗研究还是日常生活中。然而数据分析并不仅仅是一堆数字和图表;它是一个需要严谨的科学方法和逻辑推理的过程。 本文将重点介绍两种广泛应用于数据分析的统计检验方法:独立性检验和拟合优…...
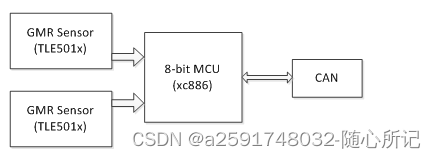
了解汽车ecu组成
常用ecu框架组成: BCM(body control module)-车身控制模块: 如英飞凌tc265芯片: 车身控制单元(BCM)适合应用于12V和24V两种电压工作环境,可用于轿车、大客车和商用车的车身控制。输入模块通过采集电路采集各路开关量和…...

用AI原生向量数据库Milvus Cloud 搭建一个 AI 聊天机器人
搭建聊天机器人 一切准备就绪后,就可以搭建聊天机器人了。 文档存储 机器人需要存储文档块以及使用 Towhee 提取出的文档块向量。在这个步骤中,我们需要用到 Milvus。 安装轻量版 Milvus Lite,使用以下命令运行 Milvus 服务器: (chatbot_venv) [egoebelbecker@ares milvus_…...

告别风扇噪音与过热:FanControl智能控温完全指南
告别风扇噪音与过热:FanControl智能控温完全指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/FanC…...

益达App:5分钟打造你的个性化跨平台媒体中心
益达App:5分钟打造你的个性化跨平台媒体中心 【免费下载链接】yidaRule 益达规则仓库 项目地址: https://gitcode.com/gh_mirrors/yi/yidaRule 在信息爆炸的时代,我们每天都要面对海量的媒体内容——视频、音频、小说、漫画分散在各个平台和网站中…...

别再手动算置信区间了!ArcGIS里用Python脚本批量计算FVC,效率提升90%
遥感植被覆盖度自动化计算:用Python脚本解放ArcGIS生产力 当面对数百景遥感数据需要计算植被覆盖度(FVC)时,手动操作ArcGIS界面不仅耗时费力,还容易因人为失误导致结果不一致。我曾在一个省级生态评估项目中,需要处理3年共36期Lan…...
)
别再只会用IP核了!手把手教你用Verilog RTL代码实现一个简单的RAM(附仿真对比)
从寄存器阵列到存储矩阵:Verilog RTL实现RAM的底层逻辑与工程实践 在FPGA和数字IC设计中,RAM(随机存取存储器)如同数字世界的记事本,承载着数据暂存与交换的关键使命。许多工程师习惯于直接调用供应商提供的IP核&#…...

告别“金鱼记忆”:Hologres + Mem0,为大模型打造企业级长记忆引擎
想象一下这个场景:一位用户在周一联系某电商平台的智能客服,咨询了一款高端相机的详细参数和优惠活动,并明确表示“我倾向于购买A品牌”。客服助手热情地解答了问题。到了周三,这位用户再次联系客服,想了解这款相机的配…...

5分钟掌握Axure RP多版本语言包管理:从部署到定制全流程
5分钟掌握Axure RP多版本语言包管理:从部署到定制全流程 【免费下载链接】axure-cn Chinese language file for Axure RP. Axure RP 简体中文语言包,不定期更新。支持 Axure 9、Axure 10。 项目地址: https://gitcode.com/gh_mirrors/ax/axure-cn …...
/智能体,新玩法10分钟搞定说课,公开课AI互动!)
在给ppt接入扣子空间(Ai)/智能体,新玩法10分钟搞定说课,公开课AI互动!
做 PPT 时,你是否遇到过这些痛点:演讲中观众突然提问,临时组织语言容易逻辑混乱;同一问题被反复询问,浪费演示时间;静态页面无法按需补充细节,信息传递不精准。而扣子空间(Coze&…...

用快马平台十分钟搭建小龙虾电商网站原型:从菜单到购物车
最近想尝试做一个小龙虾电商网站的原型,从菜单展示到购物车功能一气呵成。传统开发流程可能需要前后端配合、搭建环境、调试接口,但这次我用InsCode(快马)平台尝试了快速原型开发,整个过程比想象中简单很多。 1. 确定核心功能框架 首先梳理…...

UE5项目GPU瓶颈卡顿?手把手教你用GPU Visualizer揪出渲染性能元凶
UE5项目GPU瓶颈卡顿?手把手教你用GPU Visualizer揪出渲染性能元凶 当你的UE5项目在真机测试时突然掉帧到30fps以下,而编辑器里明明运行流畅——这种"开发环境正常,实机表现崩盘"的困境,相信每个UE开发者都经历过。上周我…...

深入 Spring 源码,剖析设计模式的落地实践
写在文章开头 阅读源码是理解框架最有效的方式之一,Spring 源码中蕴含了大量设计模式的经典应用。本文将从源码层面深入剖析这些设计模式,带你理解框架设计精髓,掌握在实际项目中灵活运用的能力。 你好,我是 SharkChili ,Java Guide 核心维护者之一,对 Redis、Nighting…...