KUKA机器人通过3点法设置工作台基坐标系的具体方法




相关文章:

KUKA机器人通过3点法设置工作台基坐标系的具体方法
KUKA机器人通过3点法设置工作台基坐标系的具体方法 具体方法和步骤可参考以下内容: 进入主菜单界面,依次选择“投入运行”—“测量”—基坐标,选择“3点法”, 在系统弹出的基坐标编辑界面,给基座标编号为3,命名为table1,然后单击“继续”按钮,进行下一步操作, 在弹出的…...

以太网的MAC层
以太网的MAC层 一、硬件地址 局域网中,硬件地址又称物理地址或MAC地址(因为用在MAC帧),它是局域网上每一台计算机中固化在适配器的ROM中的地址。 关于地址问题,有这样的定义:“名字指出我们所要寻…...
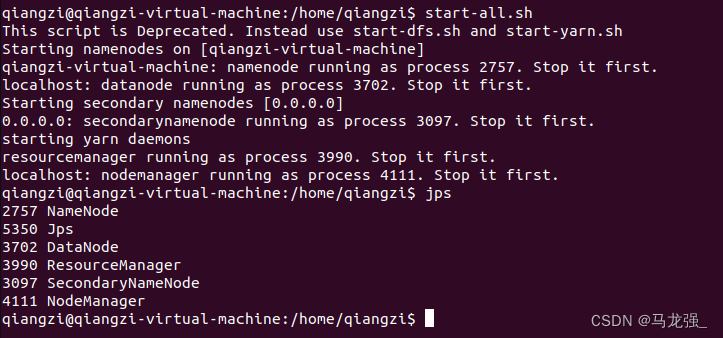
Hadoop启动后jps发现没有DateNode解决办法
多次使用 Hadoop namenode -format 格式化节点后DateNode丢失 找到hadoop配置文件core-site.xml查找tmp路径 进入该路径,使用rm -rf data删除data文件 再次使用Hadoop namenode -format 格式化后jps后出现DateNode节点...
VUE3照本宣科——应用实例API与setup
VUE3照本宣科——应用实例API与setup 前言一、应用实例API1.createApp()2.app.use()3.app.mount() 二、setup 前言 👨💻👨🌾📝记录学习成果,以便温故而知新 “VUE3照本宣科”是指照着中文官网和菜鸟教…...

json/js对象的key有什么区别?
1.对于JS对象来说 一个js对象如果是这样的 obj {"0": "小明","0name": "小明明", "": 18,"¥": "哈哈"," ": "爱好广泛" }对于js对象来说,有时候key是不…...
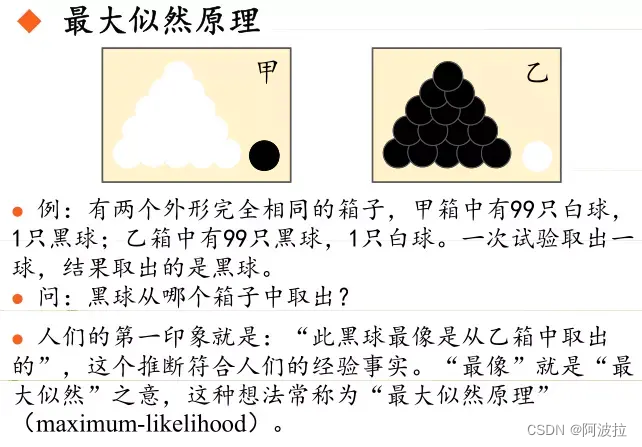
极大似然估计概念的理解——统计学习方法
目录 1.最大似然估计的概念的理解1 2.最大似然估计的概念的理解2 3.最大似然估计的概念的理解3 4.例子 1.最大似然估计的概念的理解1 最大似然估计是一种概率论在统计学上的概念,是参数估计的一种方法。给定观测数据来评估模型参数。也就是模型已知,参…...
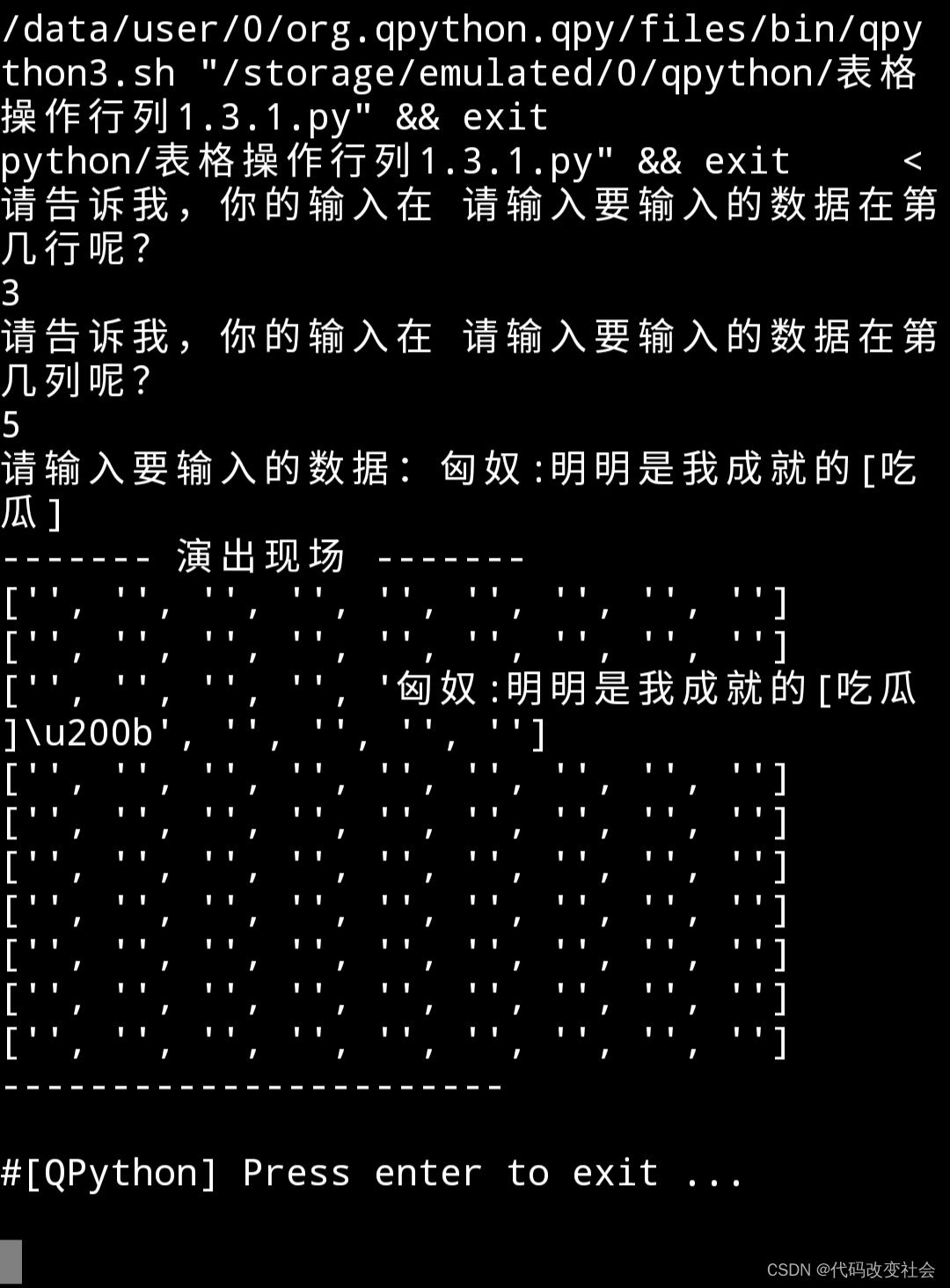
python模拟表格任意输入位置
在表格里输入数值,要任意位置,我找到了好方法: input输入 1. 行 2. 列输入:1 excel每行输入文字input输入位置 3.2 表示输入位置在:3行个列是要实现一个类似于 Excel 表格的输入功能,并且希望能够指定输入…...
如何限制文件只能通过USB打印机打印,限制打印次数和时限并且无法在打印前查看或编辑内容
在今天这个高度信息化的时代,文档打印已经成为日常工作中不可或缺的一部分。然而,这也带来了诸多安全风险,如文档被篡改、知识产权被侵犯以及信息泄露等。为了解决这些问题,只印应运而生。作为一款独特的软件工具,只印…...
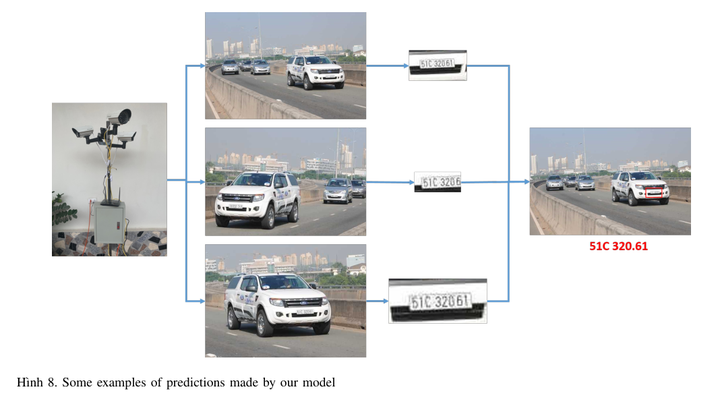
车牌文本检测与识别:License Plate Recognition Based On Multi-Angle View Model
论文作者:Dat Tran-Anh,Khanh Linh Tran,Hoai-Nam Vu 作者单位:Thuyloi University;Posts and Telecommunications Institute of Technology 论文链接:http://arxiv.org/abs/2309.12972v1 内容简介: 1)方向&#x…...

Blender中的4种视图着色模式
Blender中有四种主要的视图着色模式:线框、实体、Look Dev和渲染。它们的主要区别如下: - 线框模式只显示物体的边缘(线框),可以让您看到场景中的所有物体,也可以调整线框的颜色和背景的颜色。 - 实…...
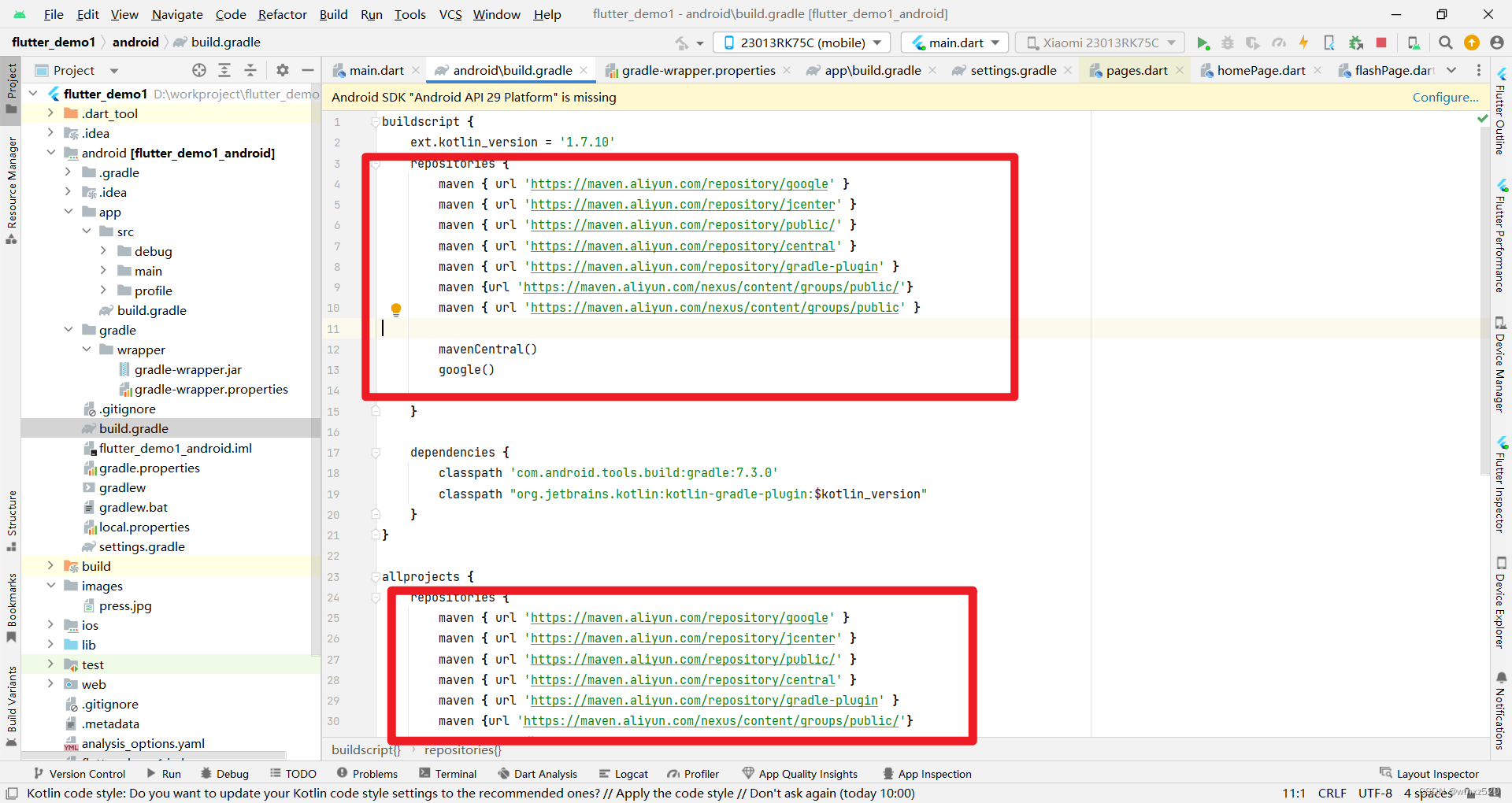
Flutter项目安装到Android手机一直显示在assembledebug
问题 Flutter项目安装到Android手机一直显示在assembledebug 原因 网络不好,gradle依赖下载不下来 解决方案 修改如下的文件 gradle-wrapper.properties 使用腾讯提供的gradle镜像下载 distributionUrlhttps://mirrors.cloud.tencent.com/gradle/gradle-7.5…...
数据预处理【等深分箱与等宽分箱】)
数据挖掘实验(二)数据预处理【等深分箱与等宽分箱】
一、分箱平滑的原理 (1)分箱方法 在分箱前,一定要先排序数据,再将它们分到等深(等宽)的箱中。 常见的有两种分箱方法:等深分箱和等宽分箱。 等深分箱:按记录数进行分箱࿰…...

Vue2 第一次学习
本章为超级浓缩版,文章过于短,方便复习使用哦~ 文章目录 1. 简单引入 vue.js2. 指令2.1 事件绑定指令 v-on (简写 )2.2 内容渲染指令2.3 双向绑定指令 v-model2.4 属性绑定指令 v-bind (简写 : )2.5 条件渲染指令2.6 循环指令 v-for 3. vue 其他知识3.1 侦听器 watch3.2 计算属…...
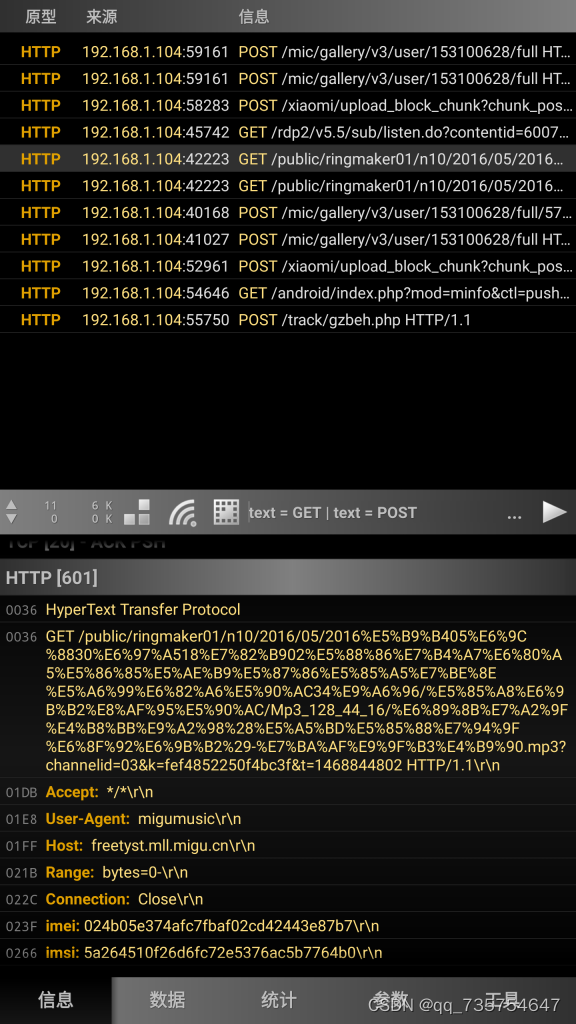
tiny模式基本原理整合
【Tiny模式】的基本构成 M【首头在首位】 U【/】 V【HTTP/】 Host H【真实ip】 XH \r回车 \n换行 \t制表 \ 空格 一个基本的模式构成 [method] [uri] [version]\r\nHost: [host]\r\n[method] [uri] [version]\r\nHost: [host]\r\n 检测顺序 http M H XH 有些地区 XH H M 我这边…...

使用聚氨酯密封件的好处?
聚氨酯密封件因其优异的耐用性、灵活性和广泛的应用范围而在各个行业中广受欢迎。在本文中,我们将探讨使用聚氨酯密封件的优点,阐明其在许多不同领域广泛使用背后的原因。 1、高性能: 聚氨酯密封件具有出色的性能特征,使其成为各…...

DevEco Studio如何安装中文插件
首先 官网下载中文插件 由于DevEco是基于IntelliJ IDEA Community的,所有Compatibility选择“IntelliJ IDEA Community”,然后下载一个对应最新的就ok了。 最后打开Plugins页面,点击右上角齿轮 -> Install Plugin from Disk…。选择下载的…...

10.2 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 国家电网 国网信通产业集团2024届校园招聘! 校招 | 国家电网 国网信通产业集团2024届校园招聘! 2、校招 | 海信集团2024届全球校园招聘正式启动!…...

Golang 语言学习 01 包含如何快速学习一门新语言
Golang方向 区块链 go服务器端 (后台流量支撑程序) 支撑主站后台流量(排序,推荐,搜索等),提供负载均衡,cache,容错,按条件分流,统计运行指标 (qps, latenc…...

整理了197个经典SOTA模型,涵盖图像分类、目标检测、推荐系统等13个方向
今天来帮大家回顾一下计算机视觉、自然语言处理等热门研究领域的197个经典SOTA模型,涵盖了图像分类、图像生成、文本分类、强化学习、目标检测、推荐系统、语音识别等13个细分方向。建议大家收藏了慢慢看,下一篇顶会的idea这就来了~ 由于整理的SOTA模型…...
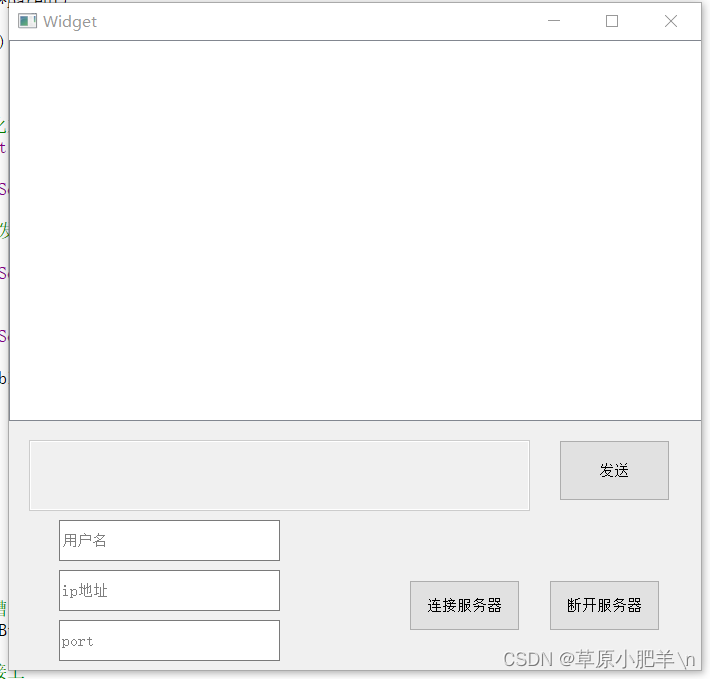
10.4 小任务
目录 QT实现TCP服务器客户端搭建的代码,现象 TCP服务器 .h文件 .cpp文件 现象 TCP客户端 .h文件 .cpp文件 现象 QT实现TCP服务器客户端搭建的代码,现象 TCP服务器 .h文件 #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #includ…...

微信好友关系终极检测:WechatRealFriends帮你一键识别单向好友
微信好友关系终极检测:WechatRealFriends帮你一键识别单向好友 【免费下载链接】WechatRealFriends 微信好友关系一键检测,基于微信ipad协议,看看有没有朋友偷偷删掉或者拉黑你 项目地址: https://gitcode.com/gh_mirrors/we/WechatRealFri…...

SDR++终极指南:如何快速掌握跨平台软件定义无线电
SDR终极指南:如何快速掌握跨平台软件定义无线电 【免费下载链接】SDRPlusPlus Cross-Platform SDR Software 项目地址: https://gitcode.com/GitHub_Trending/sd/SDRPlusPlus SDR软件定义无线电是一款开源的跨平台SDR软件,以其轻量级架构和直观界…...

51单片机LCD12864显示中文,别再傻傻用字库了!手把手教你自定义取模显示任意汉字
51单片机LCD12864深度定制:从零实现任意汉字点阵显示的艺术 在嵌入式开发领域,LCD12864液晶屏因其性价比高、接口简单而广受欢迎。但当我们需要显示公司Logo、特殊符号或艺术字体时,标准中文字库的局限性就暴露无遗。本文将彻底打破这种限制&…...

深入解析:NRF24L01如何“伪装”成蓝牙设备?STM32实战代码拆解
深入解析:NRF24L01如何“伪装”成蓝牙设备?STM32实战代码拆解 在物联网设备爆炸式增长的今天,2.4GHz频段已成为无线通信的主战场。NRF24L01作为一款经典的射频芯片,以其低廉的价格和稳定的性能赢得了大量开发者的青睐。而蓝牙技术…...

设计专利实战指南:从概念到风险防控,硬件工程师必读
1. 从“喷气式冲浪板”看设计专利的迷思与实战那天在翻看一些老旧的行业资料时,我又看到了那篇经典的“What were they thinking: Jet powered surfboard”。每次看到这个标题和那张滑稽的专利图,都让我忍不住会心一笑。一张图纸,寥寥数语&am…...

AwesomeQRCode源码阅读笔记:深入理解二维码渲染核心技术
AwesomeQRCode源码阅读笔记:深入理解二维码渲染核心技术 【免费下载链接】AwesomeQRCode An awesome QR code generator for Android. 项目地址: https://gitcode.com/gh_mirrors/aw/AwesomeQRCode 想要为你的Android应用添加炫酷的二维码生成功能吗…...

终极指南:3步解决Dell G15笔记本过热问题,开源温度控制中心完全解析
终极指南:3步解决Dell G15笔记本过热问题,开源温度控制中心完全解析 【免费下载链接】tcc-g15 Thermal Control Center for Dell G15 - open source alternative to AWCC 项目地址: https://gitcode.com/gh_mirrors/tc/tcc-g15 你是否在游戏时遭遇…...

SpringBoot的服装商城系统毕设源码
博主介绍:✌ 专注于Java,python,✌关注✌私信我✌具体的问题,我会尽力帮助你。一、研究目的本研究旨在构建一个基于Spring Boot与Vue框架的服装商城系统以解决传统电商平台在用户体验优化与业务逻辑实现方面的局限性。当前电子商务领域面临商品信息展示不…...

Dify工作流智能生成器:用自然语言快速构建AI应用
1. 项目概述:一个为Dify AI工作流“编程”的智能生成器如果你正在使用Dify构建AI应用,并且对反复拖拽节点、配置连线、调试参数感到一丝疲惫,那么Tomatio13/DifyWorkFlowGenerator这个项目可能会让你眼前一亮。它本质上是一个“用自然语言描述…...

机器学习在非洲传染病预测与监测中的实战应用
1. 项目概述:当AI遇见非洲传染病防控在公共卫生领域,时间就是生命,资源就是防线。对于非洲大陆而言,这句话的分量尤为沉重。这里常年承受着全球最沉重的传染病负担,从水源性传播的霍乱、致命性极高的埃博拉,…...