SLAM从入门到精通(用python实现机器人运动控制)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
在ROS下面,开发的方法很多,可以是c++,可以是python。大部分接口操作类的应用,其实都可以用python来开发。或者如果想对某一类的算法、设备来验证,这个时候用python来开发也是ok的。当然如果是纯算法,或者最终是需要部署在嵌入式系统上面长期运行的,那么这个时候基本上只能选择c++了。下面我们就来谈一谈如何在ros环境下进行ros开发。

1、创建scripts目录
假设我们有一个beginner_tutorials的package,这个时候首先需要创建一个scripts的目录。所有的python文件一般就安装在这个scripts目录里面。
2、编写python脚本文件
这里,我们编写一个控制小车的脚本文件vel_node.py。它实现的功能和之前vel_node.cpp其实是一样的。只不过和c++版本相比较,python脚本本身不需要编译,使用起来更加地方便。
#!/usr/bin/env python3import rospy
from geometry_msgs.msg import Twistif __name__ == "__main__":rospy.init_node("vel_node")vel_pub = rospy.Publisher("cmd_vel", Twist, queue_size=10)vel_msg=Twist()vel_msg.linear.x = 0.1rate = rospy.Rate(30)while not rospy.is_shutdown():vel_pub.publish(vel_msg)rate.sleep()从代码内容上看其实并不复杂。首先代码中创建了一个node,接着生成一个vel_pub,发布的消息是vel_msg,最后就是用vel_pub将vel_msg周期性发送出去,这就是一个基本的ros python脚本操作。
3、设置vel_node.py属性
编写好了vel_node.py,这个时候其实脚本还没有办法直接运行起来。需要用chmod +x vel_node.py运行一下,这样vel_node.py就变成可执行文件了。
4、开始测试
测试的方法也非常简单。主要的动作有两步,第一步就是用roslaunch wpr_simulation wpb_simple.launch将gazebo的仿真场景运行起来。第二步,就是利用rosrun beginner_tutorials vel_node.py命令将脚本运行起来。我们需要观察一下此时此刻,小车是否真的动起来了。如果小车一切运行ok,那代表vel_node.py脚本发挥了作用了。反之,则要回过头去看下,我们编写的vel_node.py究竟是哪里出了问题。希望了解更多rospy知识点的同学,可以看看这个链接,
http://wiki.ros.org/rospy相关文章:
SLAM从入门到精通(用python实现机器人运动控制)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 在ROS下面,开发的方法很多,可以是c,可以是python。大部分接口操作类的应用,其实都可以用python来开…...

接口和抽象类有什么区别?
接口和抽象类都是用于实现抽象类型的机制: 抽象类:抽象类可以包含抽象方法(未实现的方法)和具体方法(已实现的方法)。抽象类可以有字段(成员变量),这些字段可以是具体的,也可以是抽象的。一个类只能继承一个抽象类,Java不支持多继承。抽象类可以拥有构造方法,用于初…...

基于springboot+vue的人事系统
目录 前言 一、技术栈 二、系统功能介绍 员工信息管理 考勤信息管理 考勤信息管理 下班记录管理 三、核心代码 1、登录模块 2、文件上传模块 3、代码封装 前言 随着信息技术在管理上越来越深入而广泛的应用,作为学校以及一些培训机构,都在用信息…...

记住这份软件测试八股文还怕不能拿offer?你值得拥有
前言 2023秋招即将来临,很多同学会问软件测试面试八股文有必要背吗? 我的回答是:很有必要。你可以讨厌这种模式,但你一定要去背,因为不背你就进不了大厂。 国内的互联网面试,恐怕是现存的、最接近科举考试…...
2023年,在CSDN拥有10000粉丝有多难?
该数据来源于粉丝数人数排行前5000名用户的关注用户列表中产生的,由于采集样本数有限,数据可能具有一定的误差,仅供参考,本次采样用户数大概在100万以上。 筛选条件人数粉丝人数大于50007519粉丝人数大于100003763粉丝人数大于500…...

C++ -- 学习系列 关联式容器 set 与 map
一 关联式容器是什么? c 中有两种容器类型:关联式容器与序列式容器(顺序容器) 关联式中的容器是按照关键字来存储与访问的,序列式容器(顺序容器)则是元素在容器中的相对位置来存储与访问的。…...
Day 04 python学习笔记
Python数据容器 元组 元组的声明 变量名称(元素1,元素2,元素3,元素4…….) (元素类型可以不同) eg: tuple_01 ("hello", 1, 2,-20,[11,22,33]) print(type(tuple_01))结果&#x…...
Moonbeam Ignite强势回归
参与Moonbeam上最新的流动性计划 还记得新一轮的流动性激励计划吗?Moonbeam Ignite社区活动带着超过300万枚GLMR奖励来啦!体验新项目,顺便薅一把GLMR羊毛。 本次Moonbeam Ignite活动的参与项目均为第二批Moonbeam生态系统Grant资助提案中获…...

【改造后序遍历算法】95. 不同的二叉搜索树 II
95. 不同的二叉搜索树 II 解题思路 遍历每一个节点查看以k为根节点的二叉搜索树储存所有左子树的根节点储存所有右子树的根节点将左子树和右子树组装起来 将根节点储存在向量中 /*** Definition for a binary tree node.* public class TreeNode {* int val;* TreeN…...
)
栈的基本操作(数据结构)
顺序栈的基本操作 #include <stdlib.h> #include <iostream> #include <stdio.h> #define MaxSize 10typedef struct{int data[MaxSize];int top; }SqStack;//初始化栈 void InitStack(SqStack &S){S.top -1; } //判断栈空 bool StackEmpty(SqStack S)…...
)
D. Jellyfish and Mex Codeforces Round 901 (Div. 2)
Problem - D - Codeforces 题目大意:有一个n个数的数组a,数m初始为0,每次操作可以删除任意一个数,然后m加上那个数,求n次操作和m的最小值 1<n<5000;0<a[i]<1e9 思路:可以发现&am…...
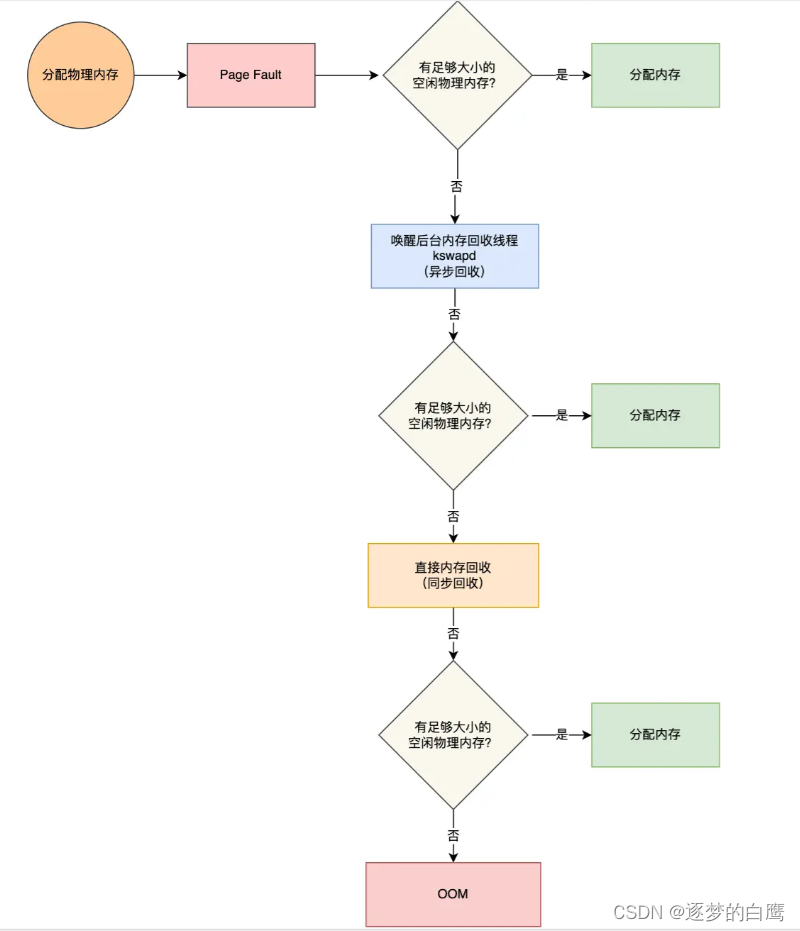
操作系统内存管理相关
1. 虚拟内存 1.1 什么是虚拟内存 虚拟内存是计算机系统内存管理的一种技术,我们可以手动设置自己电脑的虚拟内存。不要单纯认为虚拟内存只是“使用硬盘空间来扩展内存“的技术。虚拟内存的重要意义是它定义了一个连续的虚拟地址空间,并且 把内存扩展到硬…...
Sui流动性质押黑客松获胜者公布,助力资产再流通
Sui流动质押黑客松于日前结束Demo Day演示,其中有五个团队获奖、六个团队荣誉提名,共有超过30个项目获得参赛资格。此外,有两个团队赢得了Sui上DeFi协议提供的赏金。 本次黑客松的目的是挖掘并奖励将流动质押功能集成到其apps和产品中的开发…...

为什么在使用PageHelper插件时,指定的每页记录数大小失效?显示所有的记录数
1.问题现象: 这里指定每页显示5条,却把所有的记录数都显示出来了 2.分析: 之前是可以的,然后发现:PageHelper.startPage(pageNum,pageSize) 和执行sql的语句 顺序颠倒了,然后就出错了。 3.验证…...

XML文档基础
什么是XML XML (eXtensible Markup Language,可扩展标记语言) 是一种用于存储和传输数据的文本文件格式。用户可以按照XML规则自定义标记,XML 的设计目标是传输数据,而不是显示数据,因此它是一种通用的标记语言,可用于…...

软考知识汇总-软件工程
软件工程 1 能力成熟度模型(CMM)2 能力成熟度模型集成(CMMI)2.1阶段式模型2.2 连续式模型 3 软件过程模型 1 能力成熟度模型(CMM) 将软件工程成熟度分为5个级别 初始级:杂乱无章,很…...
力扣:119. 杨辉三角 II(Python3)
题目: 给定一个非负索引 rowIndex,返回「杨辉三角」的第 rowIndex 行。 在「杨辉三角」中,每个数是它左上方和右上方的数的和。 来源:力扣(LeetCode) 链接:力扣(LeetCode)…...
指针笔试题(带解析版)
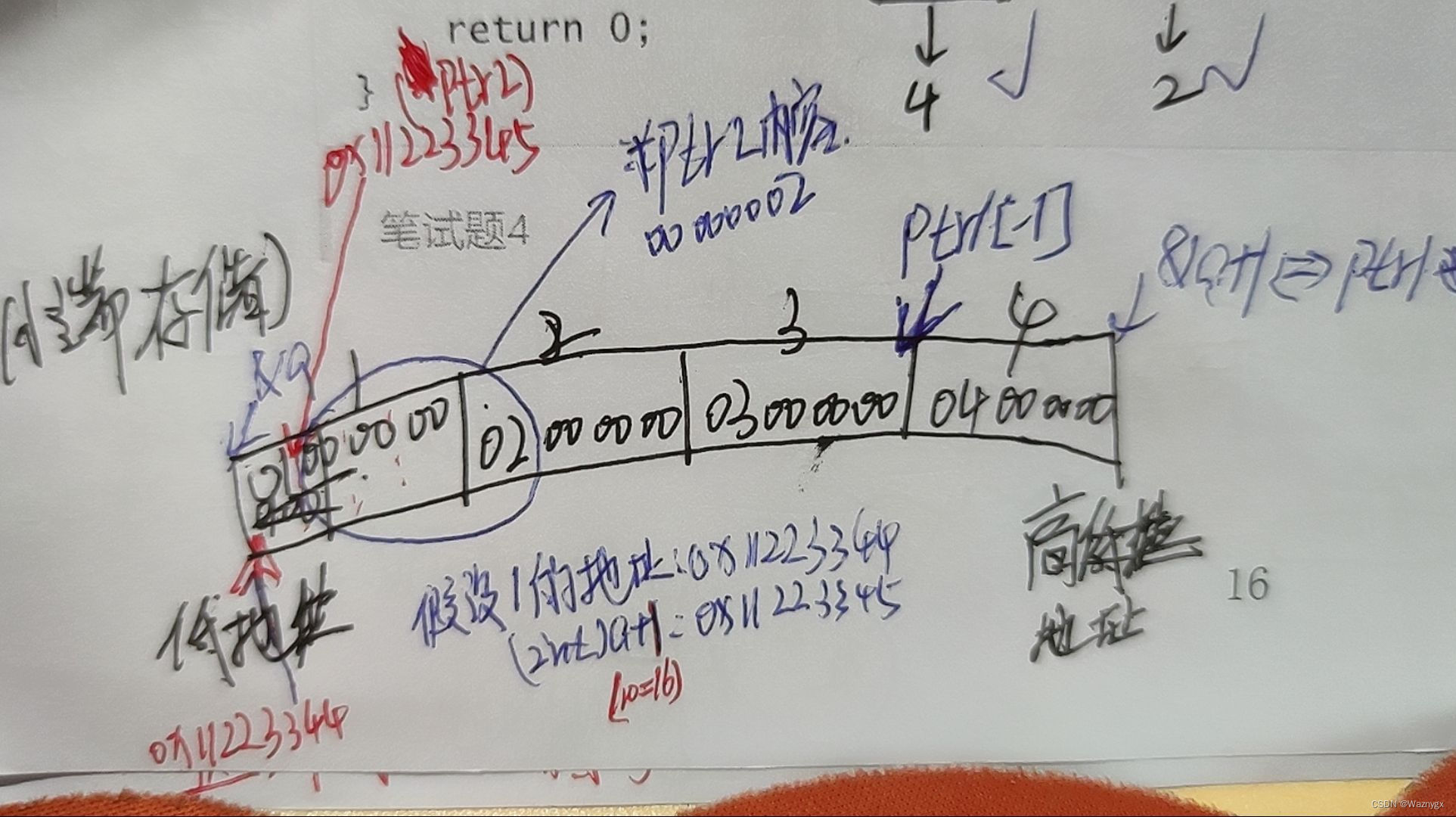
题目2: struct MyStruct {int num;char* pcname;short sdate;char cha[2];short sba[4]; }*p; //结构体大小为32字节 //p0x100000 int main() {p 0x100000;printf("%p\n", p 0x1);//p:结构体指针,1下一个结构体指针,…...
服务器搭建(TCP套接字)-libevent版(服务端)
Libevent 是一个开源的事件驱动库,用于开发高性能、并发的网络应用程序。它提供了跨平台的事件处理和网络编程功能,具有高性能、可扩展性和可移植性。下面详细讲解 Libevent 的主要组成部分和使用方法。 一、事件基础结构(event_base&#x…...
斐波那契模型系列【动态规划】
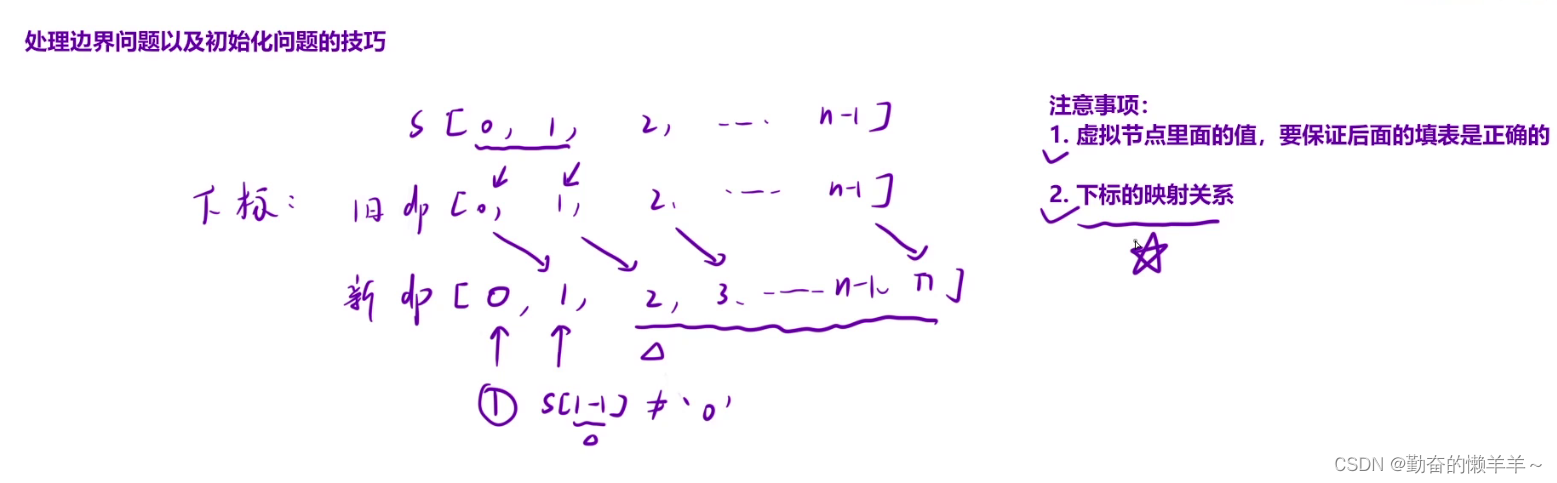
动态规划步骤 1、状态表示 是什么:dp表(可能是一维或二维数组)里的值所表示的含义。 怎么来: 1、题目要求 2、经验题目要求 3、发现重复子问题 2、状态转移方程 dp[i]... 3、初始化 保证填表不越界 4、填表顺序 5、返回值 写代码时…...

Arm CoreSight TPIU-M调试技术详解与应用
1. Arm CoreSight TPIU-M技术深度解析在嵌入式系统开发中,调试和追踪功能是确保系统可靠性和性能优化的关键。作为Arm CoreSight调试架构的重要组成部分,TPIU-M(Trace Port Interface Unit for Cortex-M)为Cortex-M系列处理器提供…...

TAMEn系统:触觉视觉数据采集的模块化解决方案
1. TAMEn系统概述:触觉视觉数据采集的革命性方案在机器人操作领域,接触丰富的任务(如柔性物体处理、精密装配)一直面临着数据采集的挑战。传统视觉系统难以捕捉细微的接触信号(如初始滑动、局部变形)&#…...

基于MCP协议的Kubernetes智能运维助手:lazymac-k-mcp项目详解
1. 项目概述:一个为Kubernetes而生的MCP服务器如果你和我一样,日常工作中有一大半时间都在和Kubernetes集群打交道,那么你肯定对kubectl命令行工具又爱又恨。爱的是它功能强大,是操作K8s的瑞士军刀;恨的是它命令繁多&a…...
)
DeepSeek Mesh可观测性体系构建:1个Prometheus+3类自定义指标+7类黄金信号告警模板(附YAML源码)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek Mesh可观测性体系全景概览 DeepSeek Mesh 是面向大规模 AI 模型推理服务的云原生服务网格,其可观测性体系并非简单叠加监控指标,而是围绕模型生命周期、推理链路与资源…...

研究生必备|5款主流文献引用工具深度测评:从课程论文到毕业答辩,哪款能让你省下20小时格式调整时间?
凌晨3点,你盯着Word里200多条参考文献发呆:导师刚通知改用APA格式,而你手动调了一整天的GB/T 7714全得推倒重来。投稿被拒,只因参考文献格式不符合期刊要求。课程论文、小论文、开题报告、毕业大论文……每一次都是格式地狱。本文…...

MimicFlow:可视化AI代码生成过程,弥合编程信任鸿沟
1. 项目概述:当AI写代码时,我们如何“看见”思考过程?如果你和我一样,深度使用过Cursor、GitHub Copilot或者任何基于大语言模型的AI编程助手,一定经历过这样的瞬间:你提出一个需求,AI助手瞬间生…...

Go 里什么时候可以“panic”?
“Don’t panic.” —— Go 谚语 但……如果我真的想 panic 呢?在 Go 的世界里,panic() 就像厨房里的灭火器:平时你不会用它炒菜,但如果油锅着火了,你肯定得拉它一把。今天我们就来聊聊:Go 里什么时候 pani…...

可穿戴ESD监测:从被动防护到主动感知的静电管理革命
1. 项目概述:当静电成为“幽灵”,可穿戴监测如何为航空航天制造“显形” 在航空航天和高可靠性电子制造领域,我们常常与一个看不见的“幽灵”作斗争——静电放电。这个“幽灵”无声无息,却能轻易摧毁价值数十万甚至数百万美元的精…...

NCM音乐解锁终极指南:3步实现网易云音乐格式自由转换
NCM音乐解锁终极指南:3步实现网易云音乐格式自由转换 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的NCM加密文件无法在其他播放器使用而烦恼吗?ncmdump解密工具让你轻松突破格式限制&…...

C#上位机开发入门:手把手教你用PowerPMAC SDK实现第一个通讯Demo
C#上位机开发入门:从零构建PowerPMAC通讯Demo的实战指南 引言 当你第一次打开PowerPMAC开发套件时,面对密密麻麻的库文件和数百页的技术手册,是否感到无从下手?作为工业自动化领域的核心控制器,PowerPMAC与上位机的通讯…...