【现代机器人学】学习笔记十四:中文版印刷/翻译勘误
首先声明,这个印刷/勘误并非经过官方的认可,只是我个人的粗浅的理解。如果内容有误,恳请大家谅解指正。
其实有的并不算错,只是我个人认为不太准确,在我学习过程中产生了一些小疑惑和误解。
都是一些小毛病,瑕不掩瑜,本文的目的并非挑刺。在我心目中这本书是经典中的经典,中文版的翻译也是难得的精品。
此外,我所整理的内容应该也不完善,也请大家一起进行补充。
英文版wiki主页:
Modern Robotics Errata - Northwestern Mechatronics Wiki
英文版勘误:
Modern Robotics Errata - Northwestern Mechatronics Wiki
1. 中文版88页,第四章前向运动学印刷错误:

中文版把这个M矩阵的左上角第一个数字印刷成了1。
2. 中文版121页,第五章一阶运动学与静力学第第二点常见奇异的标题,翻译不太准确。
《2.3个平面转动副轴线平行》应为 《2.3个共面转动副轴线平行》
3. 中文版139页,第六章逆运动学,图6.7的注释翻译不太准确
“....而当初始估计值在xd-f(theta)高点之上或附近,结果可能导致...”
这个英文原文为:
... and an initial guess at or near the plateau would result in...
这里是“at”而非“up”。因此不用翻译成“高点之上”,而是写成“...高点或附近..“即可。
4. 中文版140页,第六章逆运动学,倒数第三行,翻译有误
“Jb的伪逆应该作为物体速度旋量...”
这显然是翻译错误,因为雅可比的绝对不可能是旋量,这里原书中是这样写的:
“the pseudoinverse of should act on a body twist
"
这里的act on 应该翻译为 “作用于” 更合适,而不是翻译成“作为”。
5. 中文144页/英文版235页,第六章逆运动学,小结部分公式错误加入dot上标:
误把 写成了
,其实这个
上面是没有dot的,加上了dot意味着它是角速度了。
6.中文版151页,第七章闭链运动学,最后一行公式印刷错误:

中文版错误的把红色框内的b印刷成了s。
7.中文版180页,第八章开链动力学,第四行翻译不准确(这点待定):
“....,以及速度乘积分量”
英文原版中也为“a velocity product component”
翻译的本身是没问题的,但这里描述的是
根据李括号的物理含义,个人认为这里应该为 叉积 而不是 乘积。
8. 中文版181页,第八章开链动力学,8.4小节下方第二行,印刷错误:
![]()
印刷的时候把“g”给漏掉了。
9. 中文版181页,第八章开链动力学,8.4小节,8.56式上方五行,翻译有误:
“....并且令表示由
确定的刚体雅可比矩阵。...”
这里很显然body不能翻译成“刚体”。根据书中之前的一贯描述,这里应该翻译为“物体”雅可比矩阵
10.中文版211页,第九章轨迹生成,(9.36)式印刷错误:
提到的“零惯量点”处印刷错误,写成了,实际上英文版原文是:
![]()

11.中文版258页,第十一章 机器人控制,第五行印刷错误1:
中文版书中在上方没有加那个“点”。
12. 中文版263页,第十一章 机器人控制,第五行印刷错误2:

这里应该是加号,中文版错写成了等号。
13. 中文版275页,第十一章 机器人控制,(11.43式)上方一行翻译和之前不一致:
“...并使用为斜对称矩阵这一事实...”
这个翻译并没有任何错,但是书中一向称呼为“反对称矩阵”,私以为还是前后一致的好。。
14. 中文版297页,第十二章抓握与操作,(12.6式)印刷错误:

有效约束这里应该为等于,而非大于等于。
否则跟 12.5式 不可穿透性约束 成为一码事了。
15. 中文版299页,第十二章抓握与操作,倒数第二行印刷错误:
“....如果是接触接触则标签为S”,这里应该为“..如果是滑动接触则标签为S”
16. 中文版353页,第十三章 轮式移动机器人,第九行印刷错误:
中文版把符号u给漏掉了。
感谢大家关注我的笔记专栏:
【现代机器人学】学习笔记
相关文章:
【现代机器人学】学习笔记十四:中文版印刷/翻译勘误
首先声明,这个印刷/勘误并非经过官方的认可,只是我个人的粗浅的理解。如果内容有误,恳请大家谅解指正。 其实有的并不算错,只是我个人认为不太准确,在我学习过程中产生了一些小疑惑和误解。 都是一些小毛病ÿ…...
[架构之路-229]:计算机体硬件与系结构 - 计算机系统的矩阵知识体系结构
目录 一、纵向:目标系统的分层结构 1.1 目标系统的架构 1.2 网络协议栈 1.3 计算机程序语言分层 二、横向(构建目标系统的时间、开发阶段):软件工程 三、二维矩阵知识体系结构 一、纵向:目标系统的分层结构 1.1…...
第一章 visual studio下载安装
一、官网下载 地址:https://visualstudio.microsoft.com/zh-hans/ 点击免费visual studio 二、安装 运行下载好的exe文件,自定义安装目录 三、选择需要的组件安装 只需要选择标记组件,然后点击安装 等待安装完成就行 四、重启电脑 安装完之后…...

【服务器】在 Linux CLI 下安装 Anaconda
【服务器】在 Linux CLI 下安装 Anaconda 1 系统环境2 下载安装包3 安装 1 系统环境 查看系统信息 cat /etc/os-release2. 查看架构 uname -a # output # Linux localhost.localdomain 4.18.0-193.28.1.el8_2.x86_64 #1 SMP Thu Oct 22 00:20:22 UTC 2020 x86_64 x86_64 x86…...

Python中Lambda用法
在Python中,lambda函数是一种形式较短的函数,又称为匿名函数。与正常的函数不同,lambda函数没有名称,因此只能在定义时直接传递给其他函数或变量使用,而不能单独调用。 lambda函数的语法非常简单,格式如下…...
nodejs+vue养老人员活体鉴权服务系统elementui
系统 统计数据:统计报表、人员台账、机构数据、上报数据、核验报表等,养老人员活体鉴权服务是目前国家养老人员管理的重要环节,主要为以养老机构中养老人员信息为基础,每月进行活体鉴权识别并统计数据为养老补助等管理。前端功能&…...
)
解决caffe中的python环境安装的问题(补充)
上一篇(解决caffe中的python环境安装的问题_qiuchangyong的博客-CSDN博客)说到了安装过程中遇到的常见问题,其实还有一个忘了补充,就是在执行命令"sudo python -m pip install -r requirements.txt"后,出现p…...

面试常用排序查找算法
文章目录 1 二分查找2 冒泡排序3 堆排序4 插入排序5 快速排序6 选择排序7 希尔排序 1 二分查找 定义两个变量left和right,分别表示数组的左边界和右边界,初始值分别为0和len - 1,其中len是数组的长度。计算数组的中间位置mid,公式…...
CUDA C编程权威指南:1.1-CUDA基础知识点梳理
主要整理了N多年前(2013年)学习CUDA的时候开始总结的知识点,好长时间不写CUDA代码了,现在LLM推理需要重新学习CUDA编程,看来出来混迟早要还的。 1.CUDA 解析:2007年,NVIDIA推出CUDA(…...
讲讲项目里的仪表盘编辑器(四)分页卡和布局容器组件
讲讲两个经典布局组件的实现 ① 布局容器组件 配置面板是给用户配置布局容器背景颜色等属性。这里我们不需要关注 定义文件 规定了组件类的类型、标签、图标、默认布局属性、主文件等等。 // index.js import Container from ./container.vue; class ContainerControl extends…...

Qt模块、Qt开发应用程序类型、Qt未来主要市场、Qt6功能普及
Qt模块、Qt开发应用程序类型、Qt未来主要市场、Qt6功能普及 文章目录 1.Qt核心模块2.Qt的功能拓展3.Qt未来主要市场4.Qt6功能普及5.弃用的功能: Qt是一个跨平台的应用程序开发框架,提供了丰富的模块和工具来开发各种类型的应用程序。以下是Qt目前已有的…...

nodejs+vue高校校图书馆elementui
管理员输入书籍所在的书架位置,借阅提醒系统:可以查看个人借阅信息和图书到期提醒、挂失、检索、虚拟借书证不仅为群众提供了服务,而且也推广了自己,让更多的群众了解自己。 管理员页面: 第三章 系统分析 10 3.1需求分…...

CUDA C编程权威指南:1.2-CUDA基础知识点梳理
主要整理了N多年前(2013年)学习CUDA的时候开始总结的知识点,好长时间不写CUDA代码了,现在LLM推理需要重新学习CUDA编程,看来出来混迟早要还的。 1.闭扫描和开扫描 对于一个二元运算符 ⊕ \oplus ⊕和一个 n n n元…...

C语言—位运算符
目录 &(位与,AND): |(位或,OR): 位取反(~): 左移(<<): 右移(>>): &(位与,AND)&…...
怎么才能实现一个链接自动识别安卓.apk苹果.ipa手机和win电脑wac电脑
您想要实现的功能是通过检测用户代理(User Agent)来识别访问设备类型并根据设备类型展示相应的页面。您可以根据以下步骤进行实现: 选择后端语言和框架,例如:Node.js、Express。 创建一个新的Express项目。 编写一个…...
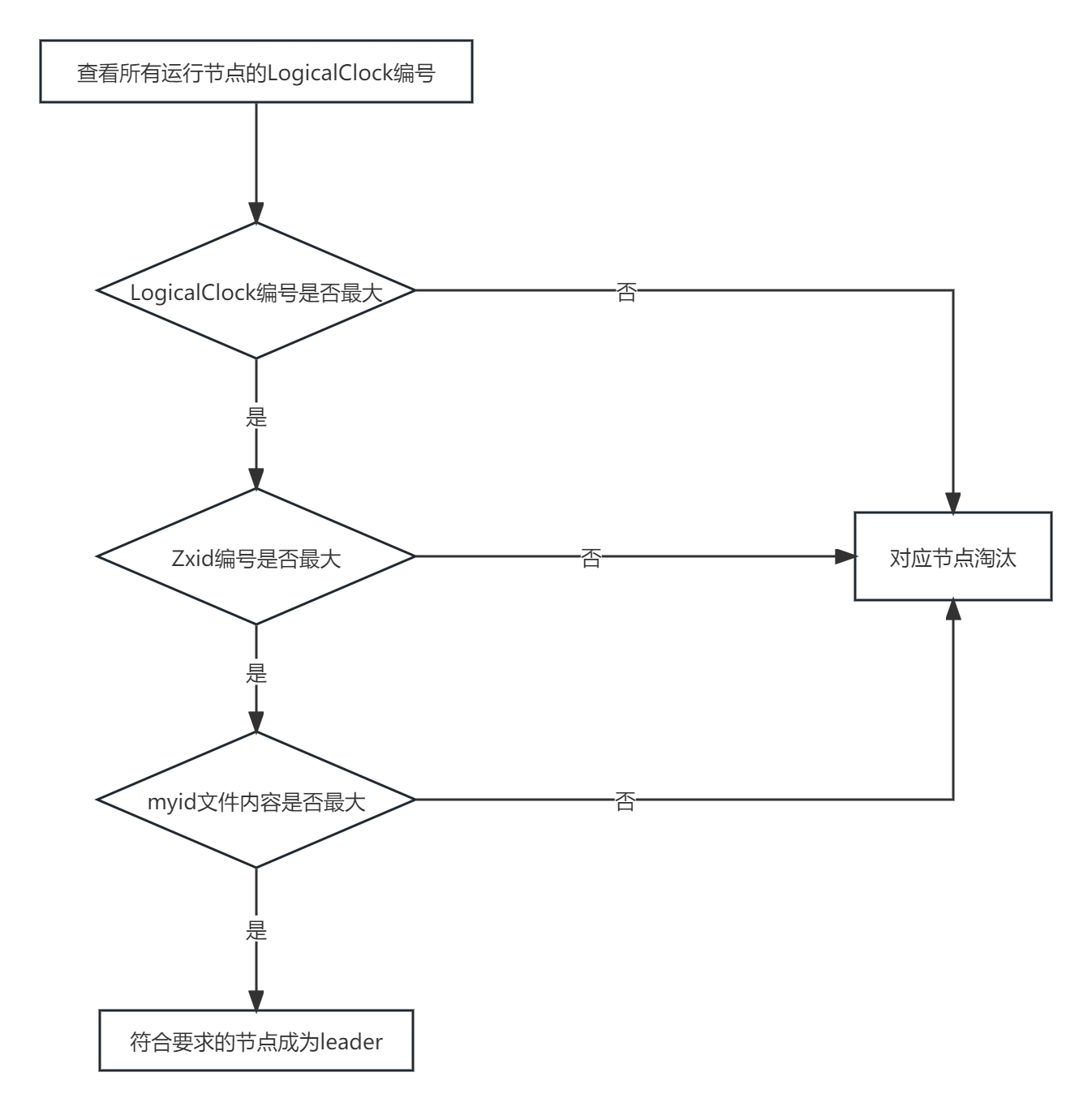
zookeeper选举机制
全新集群选举 zookeeper 全新集群选举机制网上资料很多说法很模糊,仔细思考了一下,应该是这样 得到票数最多的机器>机器总数半数 具体启动过程中的哪个节点成为 leader 与 zoo.cfg 中配置的节点数有关,下面以3个举例 选举过程如下 server…...

vcpkg切换 Visual Studio 版本
vcpkg切换 Visual Studio 版本 在使用vcpkg作为项目的包管理工具时,可能会遇到需要切换Visual Studio版本的情况。下面是一种简单的方法来实现这个目标,通过修改triplet文件来指定使用的Visual Studio版本。 步骤1: 创建或修改Triplet文件 首先&#…...
运算符重载
#include <iostream> using namespace std; class Num { private:int num1; //实部int num2; //虚部 public:Num(){}; //无参构造Num(int n1,int n2):num1(n1),num2(n2){}; //有参构造~Num(){}; //析构函数const Num operator(const Num &other)const //加号重载{Nu…...

Llama2-Chinese项目:7-外延能力LangChain集成
本文介绍了Llama2模型集成LangChain框架的具体实现,这样可更方便地基于Llama2开发文档检索、问答机器人和智能体应用等。 1.调用Llama2类 针对LangChain[1]框架封装的Llama2 LLM类见examples/llama2_for_langchain.py,调用代码如下所示:…...

ES6中数组的扩展
1. 扩展运算符 用三个点(...)表示,它如同rest参数的逆运算,将数组转为用逗号分隔的参数序列。扩展就是将一个集合分成一个个的。 console.log(...[1, 2, 3]); // 1, 2, 3可以用于函数调用 扩展运算符后还可以放置表达式 ...(x > 0 ? [a] : [])如…...
)
嵌入式调试进阶:JScope RTT模式移植与性能实测(对比HSS,速度提升千倍)
嵌入式调试革命:JScope RTT模式深度优化与高频数据采集实战 在电机控制、电源管理和高速信号处理等嵌入式应用场景中,开发人员经常需要实时监控关键变量的变化趋势。传统调试工具往往面临采样率低、数据延迟大等问题,而SEGGER JScope的RTT模式…...

Windows上快速安装APK的终极指南:APK Installer完整使用教程
Windows上快速安装APK的终极指南:APK Installer完整使用教程 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾经需要在Windows电脑上运行Android应用…...

从网线到数据包:手把手拆解以太网帧,搞懂GMAC接口到底在忙啥
从网线到数据包:手把手拆解以太网帧,搞懂GMAC接口到底在忙啥 当我们在浏览器输入一个网址,敲下回车键的瞬间,数据便开始了一场奇妙的旅程。这场旅程的起点,往往是一根不起眼的网线,而GMAC接口则是这场旅程中…...
)
别再瞎调了!OpenCV手动曝光参数CAP_PROP_EXPOSURE与快门时间换算表(附Python/C++代码)
OpenCV曝光参数与快门时间实战指南:从原理到精准控制 在计算机视觉项目中,摄像头曝光控制往往是影响图像质量的关键因素之一。许多开发者在使用OpenCV的CAP_PROP_EXPOSURE参数时,都会遇到一个共同的困惑:为什么设置的值是-13而不…...

3分钟搞定!VideoDownloadHelper视频下载插件终极安装使用指南
3分钟搞定!VideoDownloadHelper视频下载插件终极安装使用指南 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 还在为无法保存网页…...

第八部分-企业级实践——40. 容器成本优化
40. 容器成本优化 1. 成本优化概述 容器成本优化涉及资源利用率、云成本、存储成本、运维成本等多个维度。通过合理配置和优化策略,可以显著降低容器化环境的总体拥有成本(TCO)。 ┌────────────────────────────…...

36种阀体混线全自动智能分拣方案|3D视觉+机器人柔性制造实践
一、项目背景与行业痛点在高端流体控制设备制造领域,阀体、阀盖的精密分拣是保障产品质量的核心环节。随着工业设备向小型化、高精度方向发展,客户对阀体组件加工误差的控制要求持续提升,传统生产模式面临显著瓶颈:1. 人工分拣效率…...

客户受电工程图纸审核|全网独家复现,多模态+知识图谱创新改进篇 引入MM-KG融合架构,多模态感知+知识关联助力图纸全检、隐患精准定位、审核效率翻倍
目录 一、行业痛点:人工抽检模式的致命瓶颈(附真实场景痛点) 1.1 审核效率极低,无法适配规模化需求 1.2 漏判误判率高,审核质量依赖个人经验 1.3 审核标准不统一,追溯难度大 1.4 人力成本高昂,专业人才缺口大 二、创新突破:多模态+知识图谱融合架构(核心改进解析…...

5分钟上手iFakeLocation:无需越狱的iOS虚拟定位神器
5分钟上手iFakeLocation:无需越狱的iOS虚拟定位神器 【免费下载链接】iFakeLocation Simulate locations on iOS devices on Windows, Mac and Ubuntu. 项目地址: https://gitcode.com/gh_mirrors/if/iFakeLocation iFakeLocation是一款强大的跨平台开源工具…...

HoRain云--PHP安全插入MySQL数据指南
🎬 HoRain 云小助手:个人主页 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个超棒的服务器购买网站,性价比超高,大内存超划算!忍不住分享一下给大家。点击跳转到网站。 目录 ⛳️ 推荐 …...