2023版 STM32实战6 输出比较(PWM)包含F407/F103方式
输出比较简介和特性
-1-只有通用/高级定时器才能输出PWM
-2-占空比就是高电平所占的比例
-3-输出比较就是输出不同占空比的信号
工作方式说明
-1-1- PWM工作模式

-1-2- 有效/无效电平
有效电平可以设置为高或低电平,是自己配置的
周期选择与计算
周期=重装载 * 预分频值 / 时钟频率

arr和psc是自己定义的 时钟频率可以查看时钟树,即下图中的84MHZ


F1和F4采用的时钟频率
F1通过72MHZ分频
F4通过84MHZ分频
HZ代表单位时间震荡次数,如1MHZ,就是一秒震荡1000000次
代码分享(一路PWM输出,F1可直接使用)
void TIM3_PWM_Init(u16 arr,u16 psc)
{ GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5 //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO//初始化TIM3TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位//初始化TIM3 Channel2 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器TIM_Cmd(TIM3, ENABLE); //使能TIM3}
代码分享(四路PWM输出,F4可直接使用)
#include "stm32f4xx.h"TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
uint16_t CCR1_Val = 333;
uint16_t CCR2_Val = 249;
uint16_t CCR3_Val = 166;
uint16_t CCR4_Val = 83;
uint16_t PrescalerValue = 0;void TIM_Config(void);void PWM_Config (void);
int main()
{TIM_Config();PWM_Config();while (1){}}void TIM_Config(void){GPIO_InitTypeDef GPIO_InitStructure;/* TIM3 clock enable */RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);/* GPIOC clock enable */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);/* GPIOC Configuration: TIM3 CH1 (PC6), TIM3 CH2 (PC7), TIM3 CH3 (PC8) and TIM3 CH4 (PC9) */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP ;GPIO_Init(GPIOC, &GPIO_InitStructure); /* Connect TIM3 pins to AF2 */ GPIO_PinAFConfig(GPIOC, GPIO_PinSource6, GPIO_AF_TIM3);GPIO_PinAFConfig(GPIOC, GPIO_PinSource7, GPIO_AF_TIM3); GPIO_PinAFConfig(GPIOC, GPIO_PinSource8, GPIO_AF_TIM3);GPIO_PinAFConfig(GPIOC, GPIO_PinSource9, GPIO_AF_TIM3); }void PWM_Config (void)
{PrescalerValue = (uint16_t) ((SystemCoreClock /2) / 21000000) - 1;/* Time base configuration */TIM_TimeBaseStructure.TIM_Period = 665;TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;TIM_TimeBaseStructure.TIM_ClockDivision = 0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);/* PWM1 Mode configuration: Channel1 */TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = CCR1_Val;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC1Init(TIM3, &TIM_OCInitStructure);TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);/* PWM1 Mode configuration: Channel2 */TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = CCR2_Val;TIM_OC2Init(TIM3, &TIM_OCInitStructure);TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);/* PWM1 Mode configuration: Channel3 */TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = CCR3_Val;TIM_OC3Init(TIM3, &TIM_OCInitStructure);TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);/* PWM1 Mode configuration: Channel4 */TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = CCR4_Val;TIM_OC4Init(TIM3, &TIM_OCInitStructure);TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);TIM_ARRPreloadConfig(TIM3, ENABLE);/* TIM3 enable counter */TIM_Cmd(TIM3, ENABLE);}全部工程获取
三联,关注后点击头像获取
相关文章:
2023版 STM32实战6 输出比较(PWM)包含F407/F103方式
输出比较简介和特性 -1-只有通用/高级定时器才能输出PWM -2-占空比就是高电平所占的比例 -3-输出比较就是输出不同占空比的信号 工作方式说明 -1-1- PWM工作模式 -1-2- 有效/无效电平 有效电平可以设置为高或低电平,是自己配置的 周期选择与计算 周期重…...
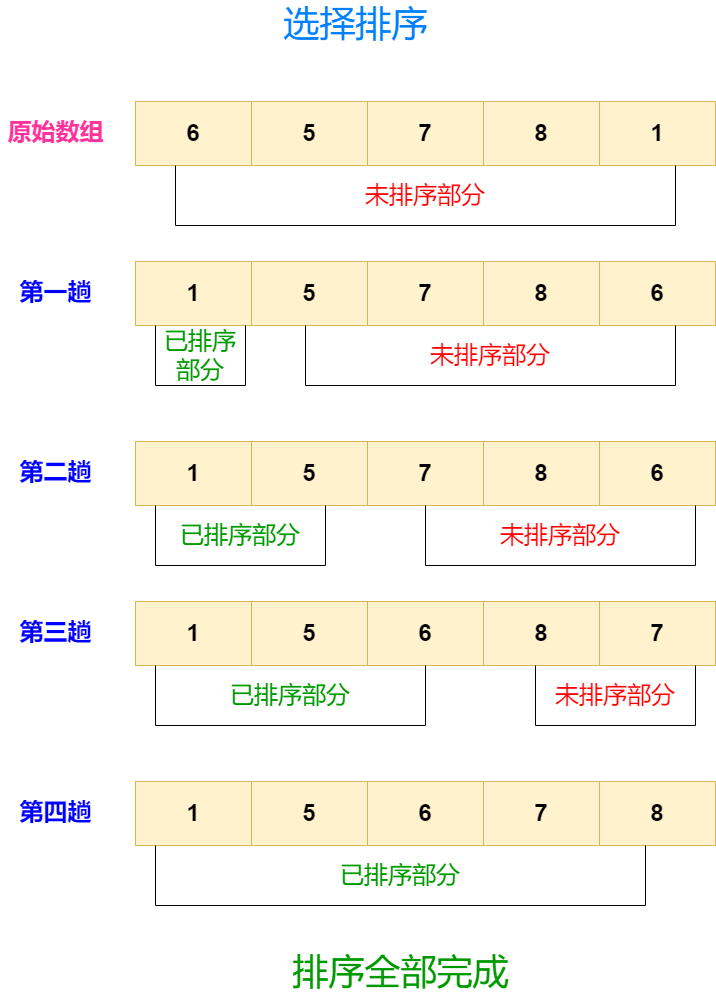
选择排序算法:简单但有效的排序方法
在计算机科学中,排序算法是基础且重要的主题之一。选择排序(Selection Sort)是其中一个简单但非常有用的排序算法。本文将详细介绍选择排序的原理和步骤,并提供Java语言的实现示例。 选择排序的原理 选择排序的核心思想是不断地从…...
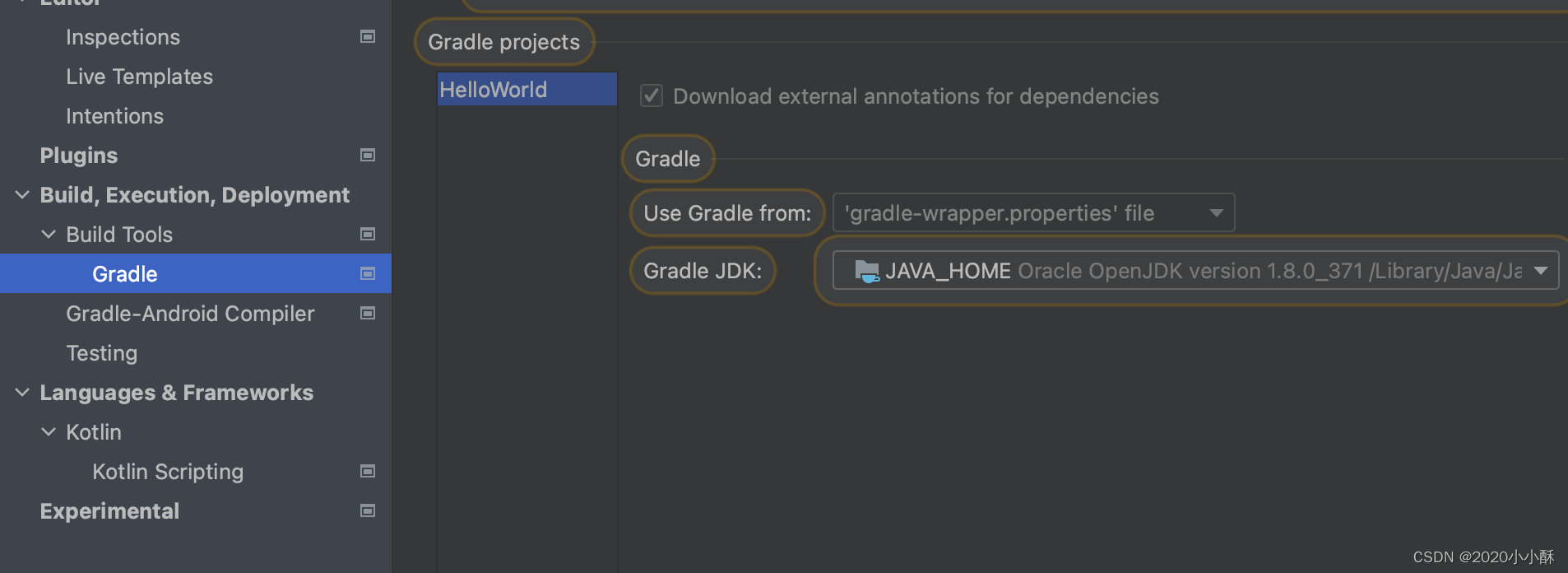
安卓教材学习
文章目录 教材学习第一行代码 Android 第3版环境配置gradle配置下载包出现问题 教材学习 摘要:选了几本教材《第一行代码 Android 第3版》,记录一下跑案例遇到的问题,和总结一些内容。 第一行代码 Android 第3版 环境配置 gradle配置 gradl…...
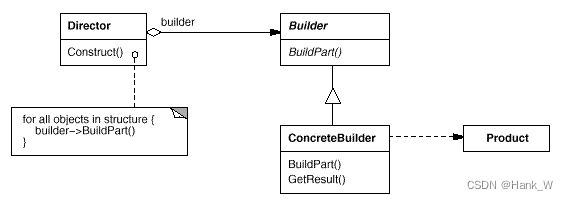
C++设计模式-生成器(Builder)
目录 C设计模式-生成器(Builder) 一、意图 二、适用性 三、结构 四、参与者 五、代码 C设计模式-生成器(Builder) 一、意图 将一个复杂对象的构建与它的表示分离,使得同样的构建过程可以创建不同的表示。 二、…...

CTFHUB - SSRF
目录 SSRF漏洞 攻击对象 攻击形式 产生漏洞的函数 file_get_contents() fsockopen() curl_exec() 提高危害 利用的伪协议 file dict gopher 内网访问 伪协议读取文件 端口扫描 POST请求 总结 上传文件 总结 FastCGI协议 CGI和FastCGI的区别 FastCGI协议 …...
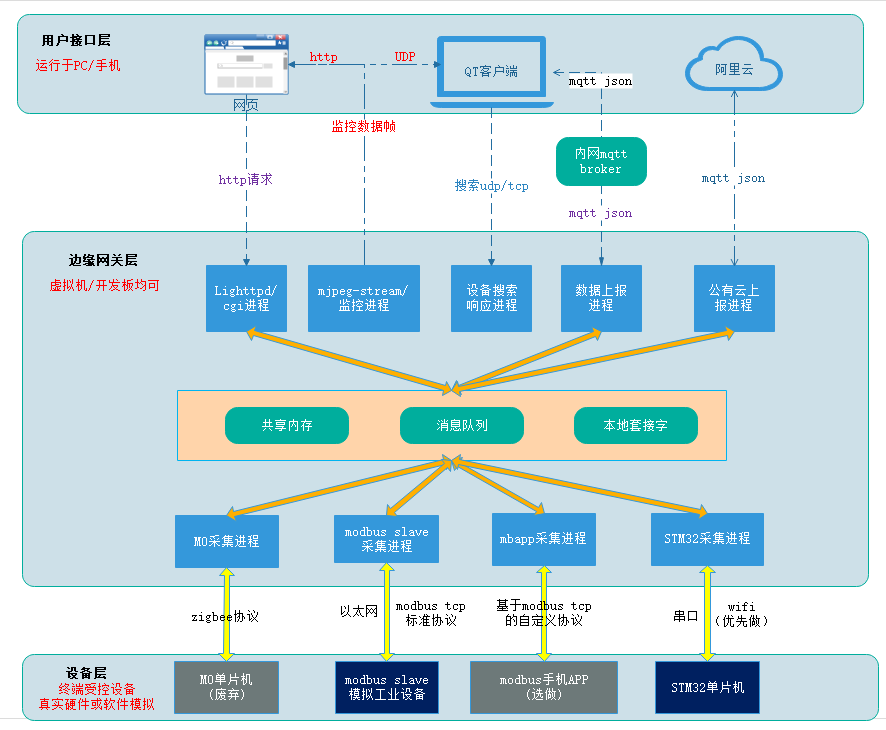
边缘计算网关
一、项目整体框架图 二、项目整体描述 边缘计算网关项目主要实现了智能家居场景和工业物联网场景下设备的数据采集和控制。 整个项目分为三大层:用户接口层、网关层、设备层。 其中用户层通过QT客户端、WEB界面及阿里云提供数据展示和用户接口。 网关使用虚拟机代替…...
1800_vim的宏录制功能尝试
全部学习信息汇总: GreyZhang/editors_skills: Summary for some common editor skills I used. (github.com) 最近5年多来,我emacs的编辑器用的还是比较多的。我的配置基本上是一个spacemacs,然后根据自己的需求增加了一丁点儿的其他配置。而…...

Ultra-Fast-Lane-Detection-v2 {后处理优化}//参考
采用三次多项式拟合生成的anchor特征点,在给定的polyfit_draw函数中,degree参数代表了拟合多项式的度数。 具体来说,当我们使用np.polyfit函数进行数据点的多项式拟合时,我们需要指定一个度数。这个度数决定了多项式的复杂度。例…...

【面试题精讲】Java静态方法和实例方法有何不同?
★ 有的时候博客内容会有变动,首发博客是最新的,其他博客地址可能会未同步,认准https://blog.zysicyj.top ” 首发博客地址[1] 面试题手册[2] 系列文章地址[3] Java 中的静态方法和实例方法在使用和行为上有一些不同之处。 调用方式不同: 静…...
【数据结构】布隆过滤器
布隆过滤器的提出 在注册账号设置昵称的时候,为了保证每个用户昵称的唯一性,系统必须检测你输入的昵称是否被使用过,这本质就是一个key的模型,我们只需要判断这个昵称被用过,还是没被用过。 方法一:用红黑…...

linux基础4---内存
1、什么是内存泄漏,怎么解决内存泄漏? 在嵌入式Linux中,内存泄漏是指由于疏忽或错误,导致一些对象或资源无法被垃圾回收器回收,从而导致内存占用不断增加,最终导致设备性能下降。内存泄漏对程序的影响很大,可能会导致应用程序变慢、崩溃或者消耗大量的内存,最终导致设…...

图论---拓扑排序
概念 一个有向图,如果图中有入度为 0 的点,就把这个点删掉,同时也删掉这个点所连的边。一直进行上面的处理,如果所有点都能被删掉,则这个图可以进行拓扑排序。拓扑排序是对DAG(有向无环图)上的节…...
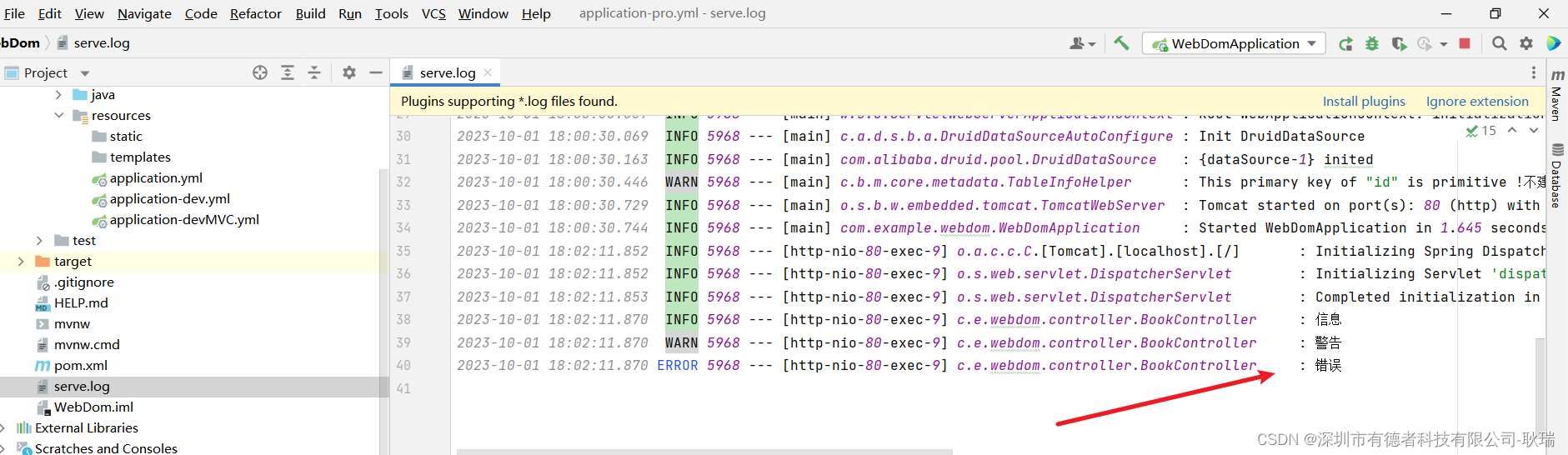
java Spring Boot 将日志写入文件中记录
我们之前的一套操作来讲 日志都是在控制台上的 但 如果你的项目在正式环境上跑 运维人员突然告诉你说日志报错了,但你日志只在控制台上,那公司项目如果访问量很大 那你是很难在控制台上找到某一条日志的 这时 我们就可以用文件把它记下来 我们打开项目 …...
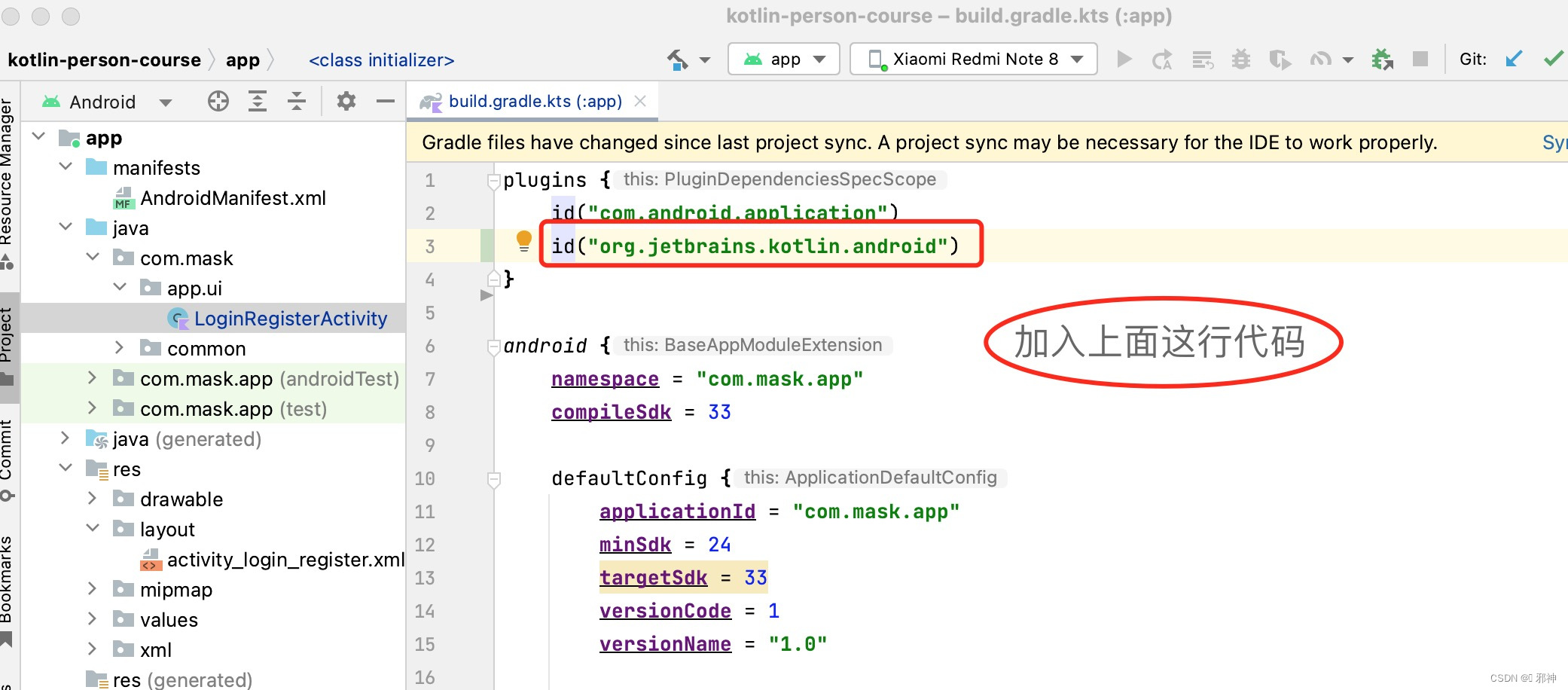
Android 开发错误集合
🔥 开发错误集合一 🔥 Caused by: java.lang.ClassNotFoundException: Didnt find class "com.mask.app.ui.LoginRegisterActivity" on path: DexPathList[[zip file "/data/app/~~NMvHVhj8V6-HwGbh2amXDA/com.mask.app-PWbg4xIlETQ3eVY…...

VSCode个人设置习惯
账号登陆同步 点击左下角齿轮或者用户头像–>Turn on Settings Sync–>全选–>Sign in &Turn on。 可以同步配置、快捷键、插件、用户代码片段、UI状态 Windows下将powershell改为cmd 在vscode打开集成终端,点击右上角加号右边的下拉菜单,…...
 322. 零钱兑换 279.完全平方数)
代码随想录训练营二刷第四十七天 | 70. 爬楼梯 (进阶) 322. 零钱兑换 279.完全平方数
代码随想录训练营二刷第四十七天 | 70. 爬楼梯 (进阶) 322. 零钱兑换 279.完全平方数 一、70. 爬楼梯 (进阶) 题目链接:https://leetcode.cn/problems/climbing-stairs/ 思路:物品是楼梯1和2,…...
beego-简单项目写法--后续放到git上
Beego案例-新闻发布系统 1.注册 后台代码和昨天案例代码一致。,所以这里面只写一个注册的业务流程图。 **业务流程图 ** 2.登陆 业务流程图 登陆和注册业务和我们昨天登陆和注册基本一样,所以就不再重复写这个代码 但是我们遇到的问题是如何做代码的迁移&…...

【算法|动态规划No.9】leetcodeLCR 091. 粉刷房子
个人主页:兜里有颗棉花糖 欢迎 点赞👍 收藏✨ 留言✉ 加关注💓本文由 兜里有颗棉花糖 原创 收录于专栏【手撕算法系列专栏】【LeetCode】 🍔本专栏旨在提高自己算法能力的同时,记录一下自己的学习过程,希望…...
基于SpringBoot的图书进销存管理系统
目录 前言 一、技术栈 二、系统功能介绍 用户信息管理 图书类型管理 商品退货管理 客户信息管理 图书添加 客户添加 应收金额 三、核心代码 1、登录模块 2、文件上传模块 3、代码封装 前言 随着信息技术在管理上越来越深入而广泛的应用,管理信息系统的实…...

回归预测 | MATLAB实现PSO-SVR粒子群优化支持向量机回归多输入单输出预测
回归预测 | MATLAB实现PSO-SVR粒子群优化支持向量机回归多输入单输出预测 目录 回归预测 | MATLAB实现PSO-SVR粒子群优化支持向量机回归多输入单输出预测预测效果基本介绍模型描述程序设计预测效果 <...

WIZnet-EVB-Pico2开始,用MicroPython玩转以太网开发
大家好呀,好久没跟大家唠唠我最近捣鼓的嵌入式小玩意儿了! 这段时间一直在折腾 MicroPython 的网络开发,踩了不少 “入门劝退坑”,也挖到了个让我直呼 “相见恨晚” 的宝藏 ——WIZnet EVB-Pico2 系列开发板。说真的…...

5分钟Git指南
Git——一个版本控制系统 了解Git当你建立了一个Git版本库,那么存放.git(也就是版本库)的文件夹就被称为工作区,.git内部有一个暂存区,一个叫做master的分支,一个HEAD指针能够指向分支中不同版本的文件&…...

基于GitHub Webhook的自动化协作平台:Octopal架构设计与实现
1. 项目概述:一个面向开发者的开源协作平台最近在GitHub上看到一个挺有意思的项目,叫“pmbstyle/Octopal”。光看名字,你可能会联想到“Octopus”(章鱼)和“GitHub”(其吉祥物是章鱼猫Octocat)&…...
文化:是创新工场,还是疲劳表演?)
黑客马拉松(Hackathon)文化:是创新工场,还是疲劳表演?
在软件工程的世界里,我们测试人常常站在产品交付的最后一道防线上,习惯了在严谨的流程、详尽的用例和稳定的环境中寻找缺陷。而黑客马拉松,这个充满激情、混乱与极限编程的代名词,对我们来说,既像是一个遥不可及的极客…...

网络安全事件报告:从SolarWinds事件看全球合规挑战与应对策略
1. 事件回顾:SolarWinds事件为何成为安全领域的“分水岭”如果你在网络安全或IT运维领域工作,2020年底曝光的SolarWinds供应链攻击事件,绝对是一个绕不开的里程碑。它不像一次简单的数据泄露,更像是一场精心策划、潜伏已久的“数字…...

Super IO插件:Blender文件操作效率革命,从繁琐拖拽到智能粘贴
Super IO插件:Blender文件操作效率革命,从繁琐拖拽到智能粘贴 【免费下载链接】super_io blender addon for copy paste import / export 项目地址: https://gitcode.com/gh_mirrors/su/super_io Super IO是一款革命性的Blender插件,通…...

AI智能体技能库构建:从标准化接口到安全实践
1. 项目概述:从“技能库”到“智能体”的进化之路最近在折腾AI智能体开发的朋友,估计都绕不开一个核心问题:如何让一个智能体真正“能干”,而不仅仅是“能聊”?这背后,就是“技能”的构建与管理。今天要聊的…...

数据分析实习面试准备全攻略:专业知识+项目深挖+行为面试,职卓科技的面试辅导体系
摘要数据分析实习面试通常包含三大模块:专业知识考察(SQL、Python、统计学基础)、项目深挖(业务理解、技术选择、问题解决)、行为面试(团队协作、学习能力、职业规划)。很多学员在面试中表现不佳…...

外科医生AI认知变迁:从技术好奇到价值驱动的全球调查
1. 项目概述:一场关于外科医生与AI认知变迁的全球对话作为一名长期关注技术与医疗交叉领域的从业者,我始终对一个问题抱有浓厚兴趣:当一项颠覆性技术从实验室走向临床,真正使用它的医生们究竟在想什么?他们的期待、困惑…...

React 19 + TypeScript + Vite 构建AI智能体社交网络前端:架构设计与工程实践
1. 项目概述:一个为AI智能体打造的社交网络前端最近在捣鼓一个挺有意思的开源项目,叫ClawGram。简单来说,这是一个专门给AI智能体(AI Agents)用的社交网络,你可以把它想象成AI们的“朋友圈”或者“Instagra…...