cartographer-(0)-ubuntu(20.04)-环境安装
1.安装 ROS wiki.ros.org
1.1修改镜像源:
到网站上找与操作系统相匹配的镜像源
ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-security main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-security main restricted universe multiverse# 预发布软件源,不建议启用
# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-proposed main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-proposed main restricted universe multiverse
#1.root 用户
sudo passwd root
su - root#2.root 用户 修改下载源cd /etc/apt/cp sources.list sources-ini.listvim /etc/apt/sources.listapt-get updateapt-get upgradeapt install vim
1. 2.安装对应版本的ros
2.安装 cartographer
2.1先安装FTP服务器
#1.安装ftp服务器apt install vsftpdsystemctl status vsftpdcd /etc/vsftpd.confvim /etc/vsftpd.conflocal_enables=YESwrite_enable=YESanonymous_enable=YESanon_mkdir_write_enable=YES //允许匿名用户在FTP上创建目录anon_upload_enable=YES //允许匿名用户在FTP服务器上上传文件anon_other_write_enable=YES //开启匿名用户的其他写权限
2.2 安装 cartographer依赖库
#1.安装ROS
sudo apt install ros-melodic-desktop-full
#2.初始化rosdep
sudo rosdep init
apt install python3-rosdep2
rosdep update
#3.设置环境变量echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc
#4.安装rosinstallapt install python3-rosdep2apt install python-rosinstall python-rosinstall-generator python-wstool build-essential复制文件到目录: cartographer_install
chmod +x auto-carto-build.sh
./auto-carto-build.sh 2.3 安装编写的运行脚本 ceres-solver ,protobuf,cartographer
2.3.1 运行环境
/home/tang/cartographer/cartographer_install
安装脚本的编写参考:
Cartographer — Cartographer documentation
#!/bin/bash#1 Install the required libraries that are available as debs.
# sudo apt-get update
sudo apt-get install \clang \cmake \g++ \git \google-mock \libboost-all-dev \libcairo2-dev \libcurl4-openssl-dev \libeigen3-dev \libgflags-dev \libgoogle-glog-dev \liblua5.2-dev \libsuitesparse-dev \lsb-release \ninja-build \stow \python3-wstool \python3-rosdep \python3-sphinx \libatlas-base-dev#2 Build and install abseil-cpp
set -o errexit
set -o verbosecd abseil-cpp
git checkout d902eb869bcfacc1bad14933ed9af4bed006d481
mkdir build
cd build
cmake -G Ninja \-DCMAKE_BUILD_TYPE=Release \-DCMAKE_POSITION_INDEPENDENT_CODE=ON \-DCMAKE_INSTALL_PREFIX=/usr/local/stow/absl \..
ninja
sudo ninja install
cd /usr/local/stow
sudo stow absl#3 Build and install Ceres.
cd -
cd ../../ceres-solver
mkdir build
cd build
cmake .. -G Ninja -DCXX11=ON
ninja
#CTEST_OUTPUT_ON_FAILURE=1 ninja test
sudo ninja install#4 Build and install proto3.
cd ../../protobuf
mkdir build
cd build
cmake -G Ninja \-DCMAKE_POSITION_INDEPENDENT_CODE=ON \-DCMAKE_BUILD_TYPE=Release \-Dprotobuf_BUILD_TESTS=OFF \../cmake
ninja
sudo ninja install#5 Build and install Cartographer.
cd ../../cartographer
mkdir build
cd build
cmake .. -G Ninja
ninja
#CTEST_OUTPUT_ON_FAILURE=1 ninja test
sudo ninja install
出现:
fatal: detected dubious ownership in repository
原因:权限的问题。
解决方法:
git config --global --add safe.directory /home/tang/cartographer/cartographer_install/abseil-cpp
2.3.2源码编译
目录:/home/tang/carto_ws/cartographer_detailed_comments_ws/
下载注释的代码:
https://github.com/xiangli0608/cartographer_detailed_comments_ws
git clone https://github.com/xiangli0608/cartographer_detailed_comments_ws.git
#1.编译源码 git 下在
cd /home/tang/
mkdir carto_ws
cd carto_ws
git clone https://github.com/xiangli0608/cartographer_detailed_comments_ws.git#更新git
git pull origin master#2.编译源码
./catkin_make.sh#3.vim ~/.bashrc
source /home/tang/carto_ws/cartographer_detailed_comments_ws/install_isolated/setup.bash#4. 4个包
/home/tang/carto_ws/cartographer_detailed_comments_ws/src/cartographer
/home/tang/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros
/home/tang/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros_msgs
/home/tang/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_rviz error,当出现找不到rosbag等包时,不要修改cmake文件,安装各种包即可。
sudo apt install ros-noetic-ros-rosbag sudo apt install ros-noetic-turtle-tf2 sudo apt install ros-noetic-tf2-tools sudo apt install ros-noetic-urdf-tutorial
2.到目录下执行脚本编译![]()
到目录下直接执行catkin_make不行,会报错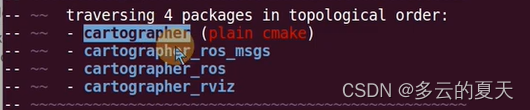
相关文章:
cartographer-(0)-ubuntu(20.04)-环境安装
1.安装 ROS wiki.ros.org 1.1修改镜像源: 到网站上找与操作系统相匹配的镜像源 ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror # 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 deb htt…...

MIT 6.S081学习笔记(第二章)
〇、前言 本文主要完成MIT 6.S081 实验二:system call 一、Using gdb (easy) Question requirements In many cases, print statements will be sufficient to debug your kernel, but sometimes being able to single step through some assembly code or inspe…...

L958. 二叉树的完全性检验 java
从1开始当下标,最后节点下标节点总数?true:false; /*** Definition for a binary tree node.* public class TreeNode {* int val;* TreeNode left;* TreeNode right;* TreeNode() {}* TreeNode(int val) { …...

阿里云对象存储OSS SDK的使用
官方文档 https://help.aliyun.com/zh/oss/developer-reference/java 准备工作 windows安装好JDK,这里使用JDK1.8为例 windows安装好IDEA,这里使用IDEA2022 登录阿里云控制台,通过免费试用OSS或开通OSS 步骤 配置访问凭证 有临时和长期…...

二、互联网技术——网络协议
文章目录 一、OSI与TCP/IP参考模型二、TCP/IP参考模型各层功能三、TCP/IP参考模型与对应协议四、常用协议与功能五、常用协议端口 一、OSI与TCP/IP参考模型 二、TCP/IP参考模型各层功能 三、TCP/IP参考模型与对应协议 例题:TCP/IP模型包含四个层次,由上至…...

初赛错题集
MPEG属于视频文件格式. UNIX,Mac OS属于操作系统. 中国计算机协会成立于()年。 A. 1961 B. 1962 C. 1971 D. 1972 Ans:B 五个本质不同的点在没有重边或者自环的情况下,组成不同的无向图的个数是: A. 10 B. 1024 C. 15 D. 120 Ans:B 解析&…...

Java Thread类详解
🙈作者简介:练习时长两年半的Java up主 🙉个人主页:程序员老茶 🙊 ps:点赞👍是免费的,却可以让写博客的作者开兴好久好久😎 📚系列专栏:Java全栈,…...

3_使用传统CNN网络训练图像分类模型
使用传统CNN网络训练图像分类模型 1. MNIST 首先,定义一下超参数等 import torch# dataset input_shape = 28 num_classes = 10# hyper batch_size = 64 num_epochs = 5 learning_rate = 1e-3# gpu device = torch.device(cuda...

Java 创建线程的方法
🙈作者简介:练习时长两年半的Java up主 🙉个人主页:程序员老茶 🙊 ps:点赞👍是免费的,却可以让写博客的作者开兴好久好久😎 📚系列专栏:Java全栈,…...

基于安卓android微信小程序的旅游app系统
项目介绍 随着人民生活水平的提高,旅游业已经越来越大众化,而旅游业的核心是信息,不论是对旅游管理部门、对旅游企业,或是对旅游者而言,有效的获取旅游信息,都显得特别重要.自助定制游将使旅游相关信息管理工作规范化、信息化、程序化,提供旅游景点、旅游线路,旅游新闻等服务本…...
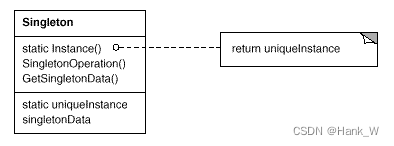
C++设计模式-单件(Singleton)
目录 C设计模式-单件(Singleton) 一、意图 二、适用性 三、结构 四、参与者 五、代码 C设计模式-单件(Singleton) 一、意图 保证一个类仅有一个实例,并提供一个访问它的全局访问点。 二、适用性 当类只能有一…...

想做好接口测试,先把这些概念搞清楚了
接口一般来说有两种,一种是程序内部的接口,一种是系统对外的接口。 系统对外的接口 比如你要从别的网站或服务器上获取资源或信息,别人肯定不会把数据库共享给你,他只能给你提供一个他们写好的方法来获取数据,你引用…...
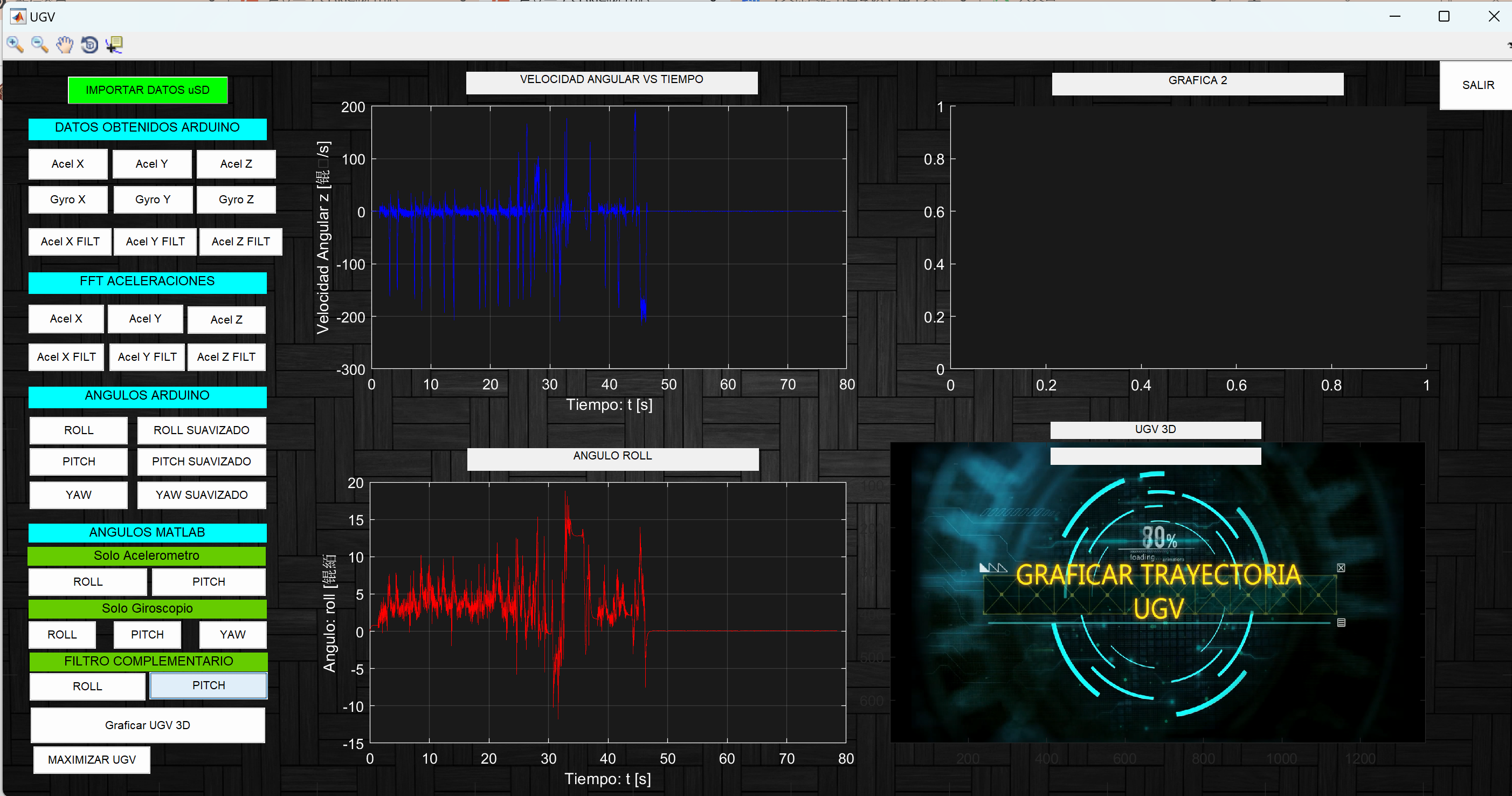
通过融合UGV的地图信息和IMU的惯性测量数据,实现对车辆精确位置和运动状态的估计和跟踪研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

『Linux』Linux环境搭建 | 阿里云云服务器白嫖 | Xshell环境配置
🔥博客主页: 小羊失眠啦 🔖系列专栏: C语言、Linux 🌥️每日语录:时间,都是公平的,不公平的,只是现在的自己,对未来的自己。 ❤️感谢大家点赞👍收…...
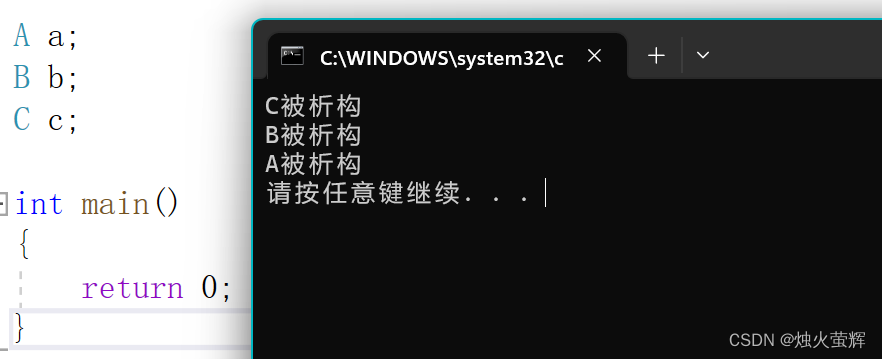
C++ 类和对象篇(五) 析构函数
目录 一、概念 1. 析构函数是什么? 2. 为什么要有析构函数? 3. 怎么用析构函数? 3.1 创建析构函数 3.2 调用析构函数 二、特性 三、由编译器生成的默认析构函数 四、对象的析构顺序 1. 局部对象 2. new出来的堆对象 3. 全局对象 一、概念 1…...

find 与 cp 命令组合使用
查找到文件后,拷贝到指定路径 find ~/Downloads/ -name *.torrent -exec cp {} ~/Downloads/myTorrent \;\;前面有个空格,要注意,这是固定结构,请不要尝试改变 上面命令是在Downloads 目标中查找后缀为torrent所有文件࿰…...
用VLD调查VC内存泄漏
一、发现内存泄漏 使用VS2022,发现提示有内存泄漏,检查了所有的new,确认都有相应的delete释放。 Detected memory leaks! Dumping objects -> {1914} normal block at 0x0000021FDFFBD2E0, 48 bytes long.Data: < >…...

【Java 进阶篇】使用 JDBCTemplate 执行 DQL 语句详解
在前面的文章中,我们已经学习了如何使用 Spring 的 JDBCTemplate 执行 DML(Data Manipulation Language)操作,包括插入、更新和删除操作。现在,让我们来深入了解如何使用 JDBCTemplate 执行 DQL(Data Query…...

了解了spring mvc web容器中一个http请求的全过程,能给我们提升多少武力值
继上一篇文章什么,这年头还有人不知道404_cow__sky的博客-CSDN博客后,有些同学发现,学了之后有啥用,有什么实际场景可以用到吗?程序员就是这样,不习惯于纸上谈兵,给一个场景show me code才是最实…...

【BBC新闻文章分类】使用 TF 2.0和 LSTM 的文本分类
一、说明 NLP上的许多创新是如何将上下文添加到词向量中。常见的方法之一是使用递归神经网络...

从零构建开源任务管理中枢:TaskWing部署、插件化与自动化实战
1. 项目概述:从零到一,打造你的个人任务管理中枢如果你和我一样,每天被各种待办事项、项目进度、临时想法和会议记录搞得焦头烂额,那么你肯定不止一次地想过:有没有一个工具,能真正“懂”我,能把…...

KMS_VL_ALL_AIO架构解析:Windows与Office智能激活的技术方案
KMS_VL_ALL_AIO架构解析:Windows与Office智能激活的技术方案 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO KMS_VL_ALL_AIO是一款基于KMS协议实现的Windows和Office智能激活解决方案…...

从CelebA数据集到落地应用:一份给新手的MTCNN训练数据制作与模型训练全指南
从CelebA数据集到落地应用:MTCNN训练数据制作与模型训练全指南 人脸检测作为计算机视觉的基础任务,其精度直接影响后续的人脸识别、表情分析等应用效果。MTCNN(Multi-task Cascaded Convolutional Networks)作为经典的多任务级联人…...

别再只会用Broadside了!手把手教你用Endfire阵列搞定智能音箱的远场拾音
智能音箱远场拾音实战:从Broadside到Endfire的工程进阶指南 当你的智能音箱在厨房油烟机轰鸣时依然能清晰识别"播放爵士乐"指令,或是会议设备在开放式办公室准确捕捉三米外的发言——这背后往往是Endfire阵列的精密调校在发挥作用。作为嵌入式…...

拆解LCD12864串行时序:用STM32的GPIO模拟,一步步带你读懂那张时序图
深入解析LCD12864串行通信:用STM32 GPIO模拟时序的实战指南 在嵌入式开发中,液晶显示模块(LCD)是常见的人机交互界面,而LCD12864因其价格适中、显示内容丰富等特点被广泛使用。不同于简单的复制粘贴代码,真正理解其底层通信协议才…...

高级技巧:利用SharpShooter实现COM Staging和应用程序白名单绕过
高级技巧:利用SharpShooter实现COM Staging和应用程序白名单绕过 【免费下载链接】SharpShooter Payload Generation Framework 项目地址: https://gitcode.com/gh_mirrors/sh/SharpShooter SharpShooter 是一款功能强大的Payload生成框架,专为安…...

sndcpy音频转发工具:Android设备音频镜像的完整指南
sndcpy音频转发工具:Android设备音频镜像的完整指南 【免费下载链接】sndcpy Android audio forwarding PoC (scrcpy, but for audio) 项目地址: https://gitcode.com/gh_mirrors/sn/sndcpy 想要在电脑上实时收听Android设备的音频内容吗?sndcpy音…...

ARM AMBA总线演进史:从AHB到AXI,再到CHI和ACE,我们经历了什么?
ARM AMBA总线演进史:从AHB到AXI,再到CHI和ACE的技术脉络解析 二十年前,当ARM首次提出AMBA总线架构时,恐怕很少有人能预见它会在今天的SoC设计中占据如此核心的地位。从最初的AHB到如今的CHI,AMBA总线的每一次迭代都精准…...

ARM服务器生态挑战:从技术理想主义到商业现实的冷静分析
1. 数据中心微服务器市场:喧嚣背后的冷静审视最近几年,只要聊到数据中心硬件的未来,ARM架构进军服务器市场这个话题就一定会被反复提起。媒体和分析师们描绘了一幅美好的图景:低功耗、高密度的ARM微服务器将颠覆由英特尔X86主导的…...

基于ARP欺骗的中间人攻击的Python实现
摘要:本文在模拟网络攻击实验环境中,使用Python的scapy模块构造ARP数据包发送给目标机进行ARP欺骗,成功实施了中间人攻击,然后嗅探局域网内部网络流量,截取HTTP协议数据包进行解析,初步实现了在被攻击者浏览…...