micro-ROS中对消息的内存管理
文章目录
- 1.背景
- 2.答案
- 2.1.基本类型及其数组,不需要
- 2.1.序列类型(复合类型、复合序列类型),需要
- 3.内存申请方法
- 3.1.手动申请(Manual allocation)
- 3.1.工具辅助(micro-ROS utilities)
- 3.1.1.规则的定义
- 3.1.2.规则的使用
1.背景
我在之前的一篇文章【在VSCode下利用PlateFormIO开发Arduino的MicroROS遇到的一些问题】中的第10点中,提到一个问题:为啥在使用自定义消息类型时,有时候需要调用 micro_ros_utilities_create_message_memory 函数来对消息对象进行内存申请,而有时候不用呢?
2.答案
其实答案就在这篇官方的指导/说明文章中:【Handling messages memory in micro-ROS】
是否需要对消息类型进行内存申请,取决于消息的成员类型。
2.1.基本类型及其数组,不需要
假如你的消息的成员类型是基本类型(Basic type)及其数组类型(Array type),比如bool、byte、char、float32,bool[n]、byte[n]、char[n]、float32[n]等等,那就不用额外进行内存申请的操作,因为这些基本类型在实例化时就已经明确了空间大小,系统直接帮忙分配好了内存。
bool bool_test
byte byte_test
char char_test
float32 float32_test
float64 double_test
int8 int8_test
uint8 uint8_test
int16 int16_test
uint16 uint16_test
int32 int32_test
uint32 uint32_test
int64 int64_test
uint64 uint64_test
2.1.序列类型(复合类型、复合序列类型),需要
但是,假如消息的成员类型为:序列类型(Sequence type)、包含序列的复合类型(Compound type)、复合序列类型(Sequences of compound types),那就需要手动申请内存空间了。当然,假如复合类型中的成员全是基本类型,那也不用手动申请。
上面提到的这些类型,之所以需要人为去申请内存,原因很简单:系统不知道你要多大的空间。
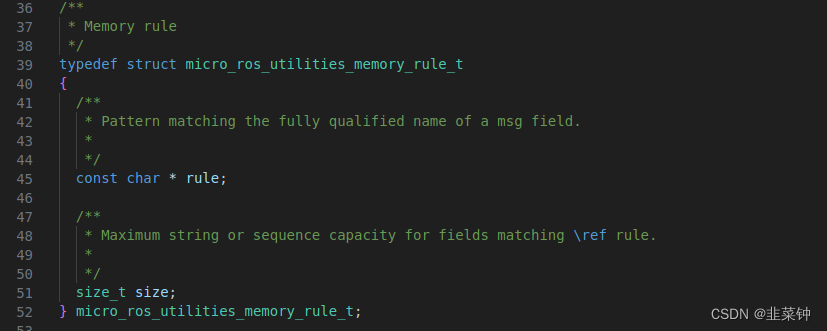
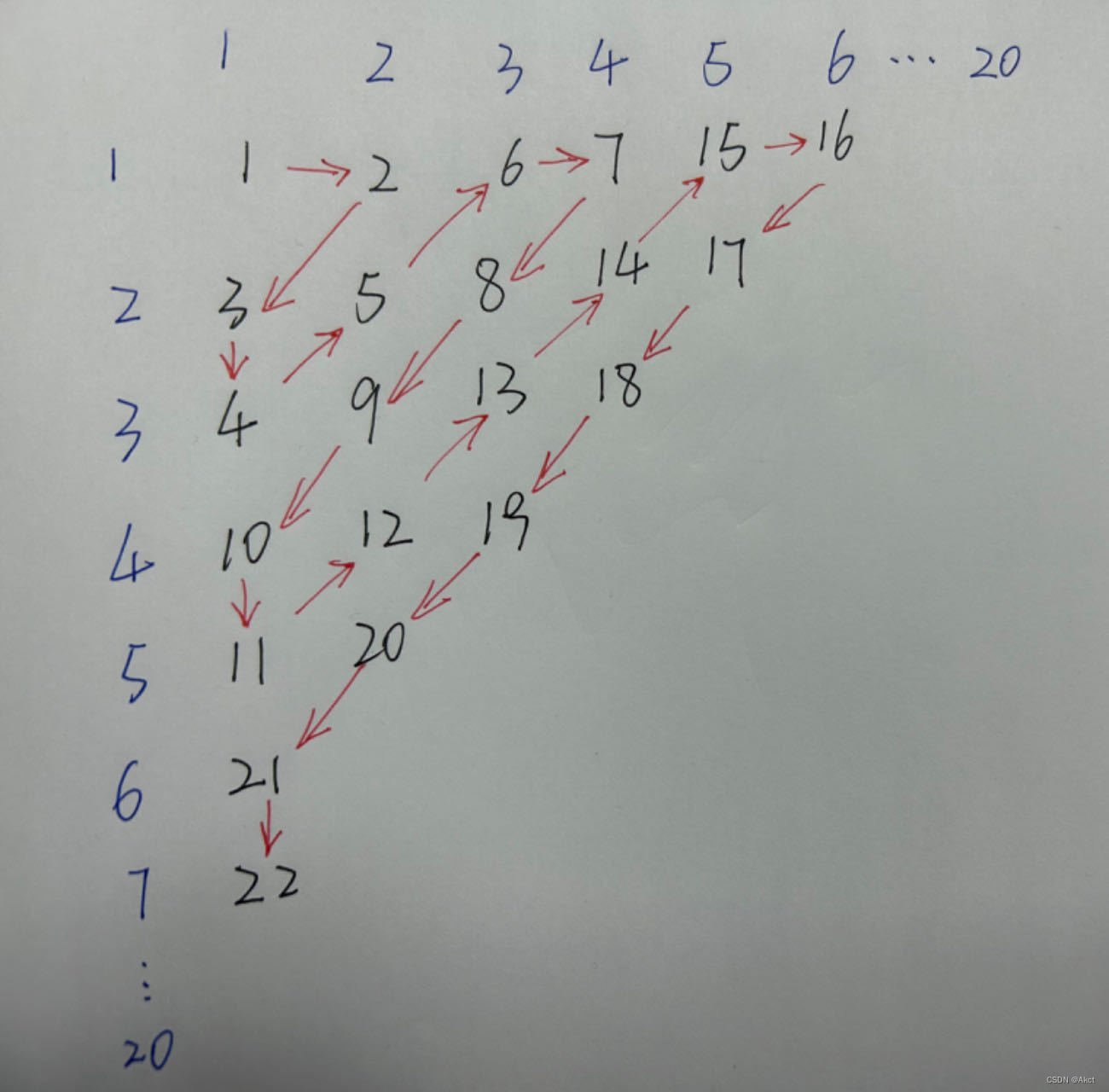
就拿int32的序列int32[](注意,这个不是数组类型,中括号中间没有具体的数值)来说,在micro-ROS中,该类型经过解析后,得到的是这样一个结构体:
typedef struct rosidl_runtime_c__int32__Sequence
{int32_t* data; /* The pointer to an array of int32 */size_t size; /* The number of valid items in data */size_t capacity; /* The number of allocated items in data */
} rosidl_runtime_c__int32__Sequence;
由于size、capacity都是未知的,那么系统如何知道要申请多大的内存空间并把指针值赋予data呢?
因此需要程序员自己手动申请并赋值一下。(这里解释一下上述结构体中的size、capacity的区别,类比电池的话,size表示剩余电量/可用电量,capacity表示电池总容量。这样设计,估计是为了在实例化一次这个对象后,能够对这个对象反复利用)
3.内存申请方法
在这个【Handling messages memory in micro-ROS】文章中提到,在micro-ROS中处理消息的内存有两种方式:手动申请(Manual allocation)、辅助申请(micro-ROS utilities)。
3.1.手动申请(Manual allocation)
这个就是要求对数据结构的各个成员进行数据填充、内存分配。比如对上面的rosidl_runtime_c__int32__Sequence类型,可以这样子初始化:
rosidl_runtime_c__int32__Sequence values;values.capacity = 100;
values.data = (int32_t*) malloc(mymsg.values.capacity * sizeof(int32_t));
values.size = 0;
这样子操作比较繁琐,更好的是下面的方法。
3.1.工具辅助(micro-ROS utilities)
在micro-ROS中,官方提供了一些函数及结构,可以让我们相对便捷地对消息类型进行内存管理。
这里看一下例子:
mypackage__msg__MyComplexType mymsg;static micro_ros_utilities_memory_conf_t conf = {0};micro_ros_utilities_memory_rule_t rules[] = {{"multiheaders", 4},{"multiheaders.frame_id", 60},{"name", 10}
};
conf.rules = rules;
conf.n_rules = sizeof(rules) / sizeof(rules[0]);// member named "values" of MyComplexType will have the default max_basic_type_sequence_capacitybool success = micro_ros_utilities_create_message_memory(ROSIDL_GET_MSG_TYPE_SUPPORT(mypackage, msg, MyComplexType),&mymsg,conf
);其中,mypackage__msg__MyComplexType类型是这样子的:
typedef struct mypackage__msg__MyComplexType
{std_msgs__msg__Header__Sequence multiheaders;rosidl_runtime_c__int32__Sequence values;double duration;int8 coefficients[10];rosidl_runtime_c__String name; // equal to rosidl_runtime_c__char__Sequence
} mypackage__msg__MyComplexType;header的类型是这样的:
typedef struct std_msgs__msg__Header
{builtin_interfaces__msg__Time stamp;rosidl_runtime_c__String frame_id;
} std_msgs__msg__Header;
3.1.1.规则的定义
可以看到,针对mypackage__msg__MyComplexType的成员multiheaders,指定下面的内存申请规则:
...
micro_ros_utilities_memory_rule_t rules[] = {{"multiheaders", 4}, // 对序列进行长度(capacity)的申请{"multiheaders.frame_id", 60}, // frame_id是字符串,进行60字节的申请...
};
...
rule的具体的写法应该是
{"对象成员名称", Sequence的capacity大小}
需要注意的是,序列成员的成员可以直接写,而不用序列号,比如上面的"multiheaders.frame_id"就不用写成"multiheaders.data[0].frame_id"之类的。
另外,对于未在rules中指定的序列类型成员,会按照micro_ros_utilities_memory_conf_t的max_string_capacity、max_ros2_type_sequence_capacity、max_basic_type_sequence_capacity来进行申请,假如需要覆盖默认值micro_ros_utilities_memory_conf_default,可以这样操作:
static micro_ros_utilities_memory_conf_t conf = {0};conf.max_string_capacity = 50;
conf.max_ros2_type_sequence_capacity = 5;
conf.max_basic_type_sequence_capacity = 5;
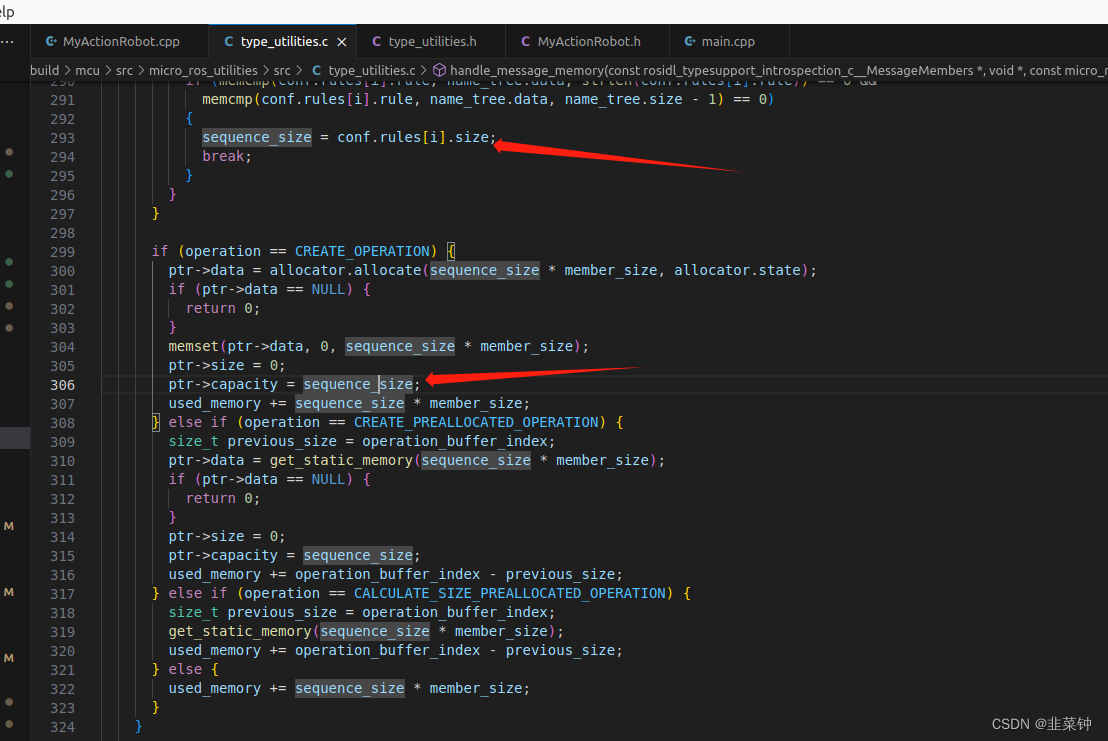
3.1.2.规则的使用
定义好规则之后,当调用 micro_ros_utilities_create_message_memory 函数时,应该是对Sequence类型的capacity进行赋值,然后再根据此capacity进行实际内存的计算+申请。(可能会涉及递归过程?)
大概看一下源码,应该是的。具体实现过程有空再分析分析。
参考:
【Handling messages memory in micro-ROS】
相关文章:
micro-ROS中对消息的内存管理
文章目录 1.背景2.答案2.1.基本类型及其数组,不需要2.1.序列类型(复合类型、复合序列类型),需要 3.内存申请方法3.1.手动申请(Manual allocation)3.1.工具辅助(micro-ROS utilities)…...
Springboot中使用拦截器、过滤器、监听器
一、Servlet、Filter(过滤器)、 Listener(监听器)、Interceptor(拦截器) Javaweb三大组件:servlet、Filter(过滤器)、 Listener(监听器) Spring…...

代码随想录二刷day45
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、力扣70. 爬楼梯二、力扣322. 零钱兑换三、力扣279. 完全平方数 前言 一、力扣70. 爬楼梯 class Solution {public int climbStairs(int n) {int[] dp new…...
泊车功能专题介绍 ———— AVP系统基础数据交互内容
文章目录 系统架构系统功能描述云端子系统车辆子系统场端子系统用户APP 工作流程基础数据交互内容AVP 系统基础数据交互服务车/用户 - 云基础数据交互内容车位查询工作流程技术要求数据交互要求 车位预约工作流程技术要求数据交互要求 取消预约工作流程技术要求数据交互要求 泊…...
蓝桥杯每日一题2023.10.6
题目描述 门牌制作 - 蓝桥云课 (lanqiao.cn) 题目分析 #include<bits/stdc.h> using namespace std; int ans; int main() {for(int i 1; i < 2020; i ){int x i;while(x){int a x % 10;if(a 2)ans ;x / 10;}}cout << ans;return 0; } 题目描述 既约分数…...

7、【Qlib】【主要组件】Data Layer:数据框架与使用
7、【主要组件】Data Layer:数据框架与使用 简介数据准备Qlib 格式数据Qlib 格式数据集自动更新日频率数据将 CSV 格式转换为 Qlib 格式股票池(市场)多股票模式 数据API数据检索特征过滤器 数据加载器QlibDataLoaderStaticDataLoaderInterfac…...
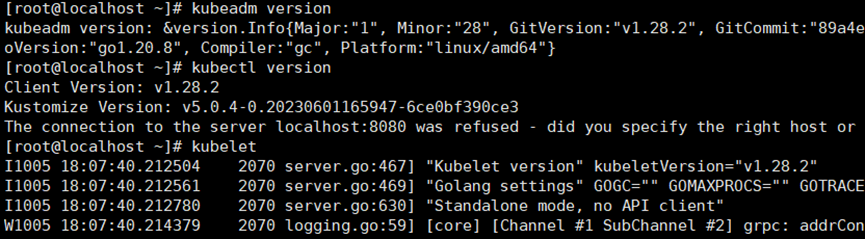
Kubernetes安装部署 1
本文主要描述kubernetes的安装部署,kubernetes的安装部署主要包括三个关键组件,其中,包括kubeadm、kubelet、kubectl,这三个组件的功能描述如下所示: Kubeadm 用于启动与管理kubernetes集群 Kubelet 运行在所有集群的…...

在VS Code中优雅地编辑csv文件
文章目录 Rainbow csv转表格CSV to Tablecsv2tableCSV to Markdown Table Edit csv 下面这些插件对csv/tsv/psv都有着不错的支持,这几种格式的主要区别是分隔符不同。 功能入口/使用方法Rainbow csv按列赋色右键菜单CSV to Table转为ASCII表格指令CSV to Markdown …...

LCR 128.库存管理 I
题目来源: leetcode题目,网址:LCR 128. 库存管理 I - 力扣(LeetCode) 解题思路: 数组可以分割成两段的升序连续子数组,找到两个子数组的开始元素并返回较小者即可。 解题代码: …...

eigen::Affine3d 转换
平移eigen::vector3d和四元数Eigen::Quaterniond 转 eigen::Affine3d Eigen::Vector3d t Eigen::Vector3d::Zero(); Eigen::Quaterniond q Eigen::Quaterniond ::Identity();Eigen::Affine3d affine3d t * q.toRotationMatrix(); Eigen::Matrix4d 转 eigen::Affine3d Eige…...
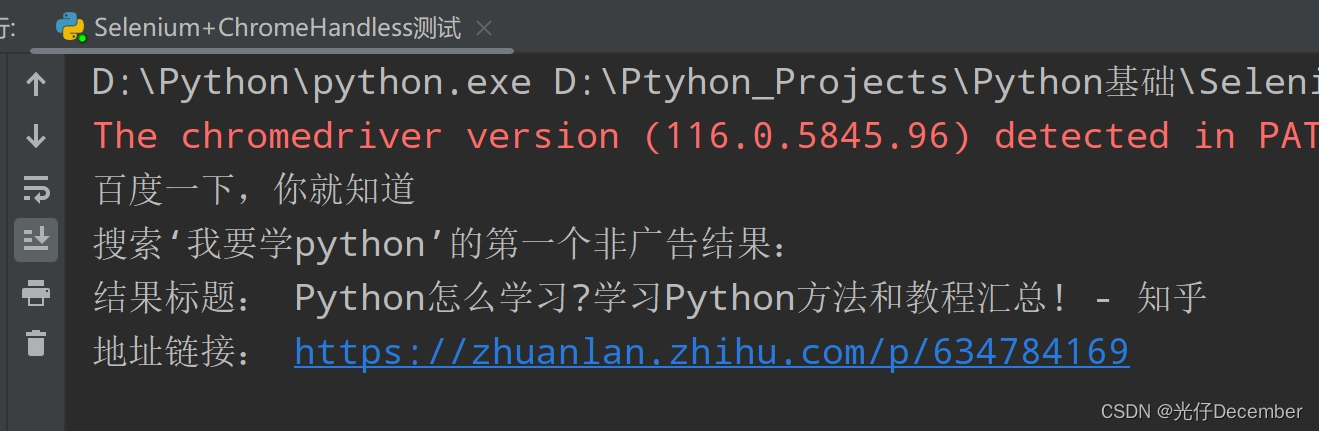
【Python从入门到进阶】38、selenium关于Chrome handless的基本使用
接上篇《37、selenium关于phantomjs的基本使用》 上一篇我们介绍了有关phantomjs的相关知识,但由于selenium已经放弃PhantomJS,本篇我们来学习Chrome的无头版浏览器Chrome Handless的使用。 一、Chrome Headless简介 Chrome Headless是一个无界面的浏览…...
)
给Python项目创建一个虚拟环境(enev)
给Python项目创建一个虚拟环境(enev) 为您的Python项目创建一个虚拟环境是一种良好的实践,可以隔离项目的依赖项,以确保它们不会干扰全局Python环境或其他项目。您可以使用venv模块来创建虚拟环境。以下是在Linux上创建虚拟环境的…...

【RK3588】YOLO V5在瑞芯微板子上部署问题记录汇总
YOLO V5训练模型部署到瑞芯微的板子上面,官方是有给出案例和转过详情的。并且也提供了Python版本的推理代码,以及C语言的代码。 但是,对于转换过程中的细节,哪些需要改?怎么改?如何改,和为什么…...

别人做的百度百科词条信息不全,如何更正自己的百度百科词条
很多人自己的百度百科词条是别人上传上去的,自己压根不知道,而且里面的信息内容要么不全,要么是有错漏的,但自己想要更正自己的百度百科词条又不知道如何更正,下面洛希爱做百科网和大家介绍一些百科经验知识。 首先百…...
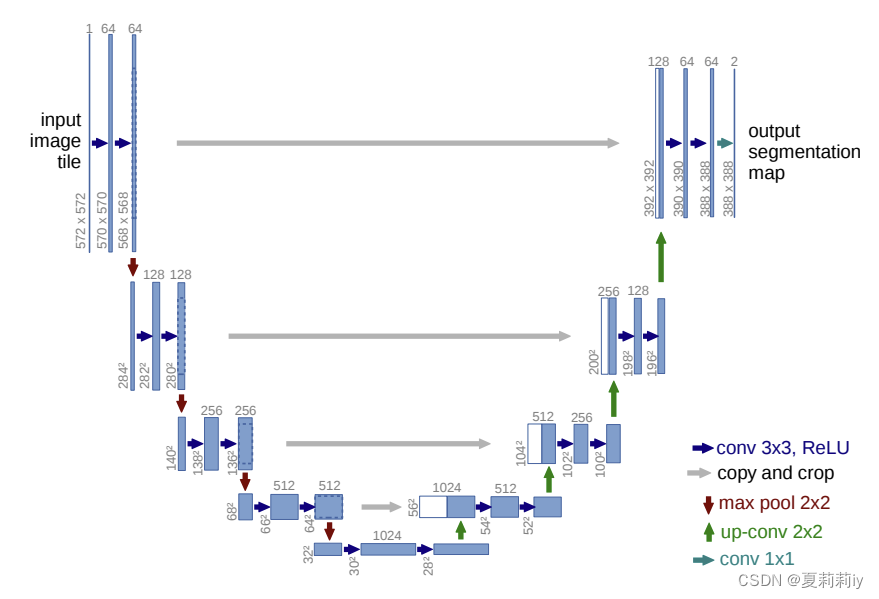
[论文精读]U-Net: Convolutional Networks for BiomedicalImage Segmentation
论文原文:U-Net: Convolutional Networks for Biomedical Image Segmentation (arxiv.org) 英文是纯手打的!论文原文的summarizing and paraphrasing。可能会出现难以避免的拼写错误和语法错误,若有发现欢迎评论指正!文章偏向于笔…...
Godot Identifier “File“ not declared in the current scope.
解决方案: f FileAccess.open(savedir, FileAccess.READ)...

Java ORM Bee,多表关联更新
Bee V2.1.8 增加支持多表的update, insert, delete; 使用FK注解进行关联. 如果子实体没有用上FK声明的字段(即FK的字段没有值),则不执行,防止更新到多余记录 外键有一个没有设置时,跳过。 更多实例,请查看样例工程:https://gitee.com/automvc/bee-exam 或:h…...

Java 读取excel文件
导入: 先导入依赖: <!-- 文件上传 --> <dependency><groupId>org.apache.httpcomponents</groupId><artifactId>httpmime</artifactId><version>4.5.7</version> </dependency> <!-- JSON -…...
:数据分析 | 数据挖掘 | 十大算法之一)
PageRank(上):数据分析 | 数据挖掘 | 十大算法之一
⭐️⭐️⭐️⭐️⭐️欢迎来到我的博客⭐️⭐️⭐️⭐️⭐️ 🐴作者:秋无之地 🐴简介:CSDN爬虫、后端、大数据领域创作者。目前从事python爬虫、后端和大数据等相关工作,主要擅长领域有:爬虫、后端、大数据开发、数据分析等。 🐴欢迎小伙伴们点赞👍🏻、收藏⭐️、…...

吃鸡达人专享!提高战斗力,分享干货,查询装备皮肤,保护账号安全!
大家好!作为专业吃鸡行家,我将为您带来一些热门话题和实用内容,帮助您提升游戏战斗力,分享顶级游戏作战干货,并提供便捷的作图工具和查询服务。让我们一起享受吃鸡的乐趣! 首先,我要推荐一款绝地…...

降AI率软件双降能力测评:嘎嘎降一次到位vs两套工具反复打架!
降AI率软件双降能力测评:嘎嘎降一次到位vs两套工具反复打架! 「先降 AI 再降重」两步流程的真实代价 我硕士论文用 DeepSeek 写过几个章节,送维普测出来——AI 率 55%,重复率 28%。两个都超学校 20% 严标准。 朋友推荐我「先买…...

汽车科技前沿:从上海车展看电动化、自动驾驶与供应链变革
1. 四月汽车科技前沿动态概览又到了每月梳理行业动态的时候了。四月份的汽车科技圈,用一个词来形容就是“多点开花”。上海车展的盛大回归,像一剂强心针,宣告了全球汽车产业活力的全面复苏。与此同时,软件定义汽车的浪潮下&#x…...

Anthropic Claude Haiku 4.5 安全突破:勒索行为从96%降至0%
上一篇: Google I/O 2026前瞻:Gemini 4.0、Android XR与AI原生生态的全面突破 下一篇: Anthropic ARR突破440亿美元:Q1营收同比增长80倍深度分析 核心结论: Anthropic通过"困难建议数据集"和宪法训练方法,成功将Claude模型的勒索行…...

如何让老旧安卓电视焕发新生:mytv-android实现流畅播放体验的完整指南
如何让老旧安卓电视焕发新生:mytv-android实现流畅播放体验的完整指南 【免费下载链接】mytv-android 使用Android原生开发的视频播放软件 项目地址: https://gitcode.com/gh_mirrors/my/mytv-android 你是否还在为家中那台反应迟钝、启动缓慢的旧电视而烦恼…...

告别机械生硬感:我熬夜实测了4款英文降AI工具,教你搞定结构级优化
最近不少学弟学妹跟我倒苦水,说查重率好不容易降下来了,结果偏偏卡在了英文降ai率上,眼看交稿DDL越来越近,心里特别着急。 我太懂这种感受了,我当时也因为英文降aigc率踩过不少坑,自己连夜纯手动改&#x…...

VSCode + GitLab 真香组合:告别命令行恐惧,可视化搞定团队代码提交与合并
VSCode GitLab 可视化协作指南:零命令行完成高效团队开发 对于视觉型开发者而言,命令行操作常常是学习Git工作流的最大障碍。当团队采用GitLab进行协作时,传统教程中频繁出现的git checkout、git rebase等命令更容易让人望而生畏。事实上&a…...

RevokeMsgPatcher:微信/QQ/TIM防撤回补丁工具完全指南
RevokeMsgPatcher:微信/QQ/TIM防撤回补丁工具完全指南 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https://gitcode.co…...

专业术语统计报告_园区综合能源系统多时间尺度协同优化运行方法研究
专业术语统计报告_园区综合能源系统多时间尺度协同优化运行方法研究 一、概要简析 【概要分析】 本文档《园区综合能源系统多时间尺度协同优化运行方法研究》超用心地围绕研究主题展开了系统性探讨哦😜!文档总字符数足足有158527,其中中文字符53671个,英文字词12011个,…...

ExifToolGUI终极指南:3步掌握照片元数据批量管理工具
ExifToolGUI终极指南:3步掌握照片元数据批量管理工具 【免费下载链接】ExifToolGui A GUI for ExifTool 项目地址: https://gitcode.com/gh_mirrors/ex/ExifToolGui 你是否曾为整理数百张旅行照片而头疼?需要统一修改拍摄时间、批量添加版权信息&…...

2025届学术党必备的六大AI科研方案推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 于当下,各类文献产出需求呈现出多元态势,一键生成论文功能作为辅助工…...