数据结构 2.1 单链表
1.单链表
线性表:1.有限的序列 2.序列中的每一个元素都有唯一的前驱和后继,除了开头和结尾的两个节点。
顺序表:分配一块连续的内存去存放这些元素,eg、数组
链表:内存是不连续的,元素会各自被分配一块内存,内存和内存之间用指针进行相连。
顺序表和链表的区别是内存的连续与否
data域 | next指针域 ——> data域 | next指针域 ——> data域 | next指针域 ——> NULL
单链表的操作:
1.增加 :1>头插法 2>尾插法
1>插入——> data域 | next指针域 ——> data域 | next指针域 ——> data域 | next指针域 ——> NULL
2>data域 | next指针域 ——> data域 | next指针域 ——> data域 | next指针域 ——> 插入——>NULL
2.删除:用前一个节点的指针直接指向对应节点的后一个节点的前驱,只操作一个指针。
为了使操作方便,在操作中添加一个头节点。头节点并不实际存储,只保存链表中的元素个数。
代码实现:
定义一个链表(结构体):
typedef struct Node {//定义一个结构体链表int data;//data域struct Node* next;//next指针
}Node;
初始化一个链表:
Node* initList() {//初始化一个链表Node* list = (Node*)malloc(sizeof(Node));//给新节点开辟空间list->data = 0;//data域list->next = NULL;//next指针return list;
}头插法:
void headInsert(Node* list,int data){//头插法 list是头节点 data域Node* node = (Node*)malloc(sizeof(Node));//开辟空间,定义一个新节点node->data = data;//新节点的data域node->next = list->next;//新节点的next指针等于原先链表的头指针的nextlist->next = node;//原先头节点next指向新插入的头节点list->data++;//代表当前链表之中插入元素
}尾插法:
void tailInsert(Node* list, int data){//尾插法Node* head = list;//头指针为定义的list头节点Node* node = (Node*)malloc(sizeof(Node));//定义新节点,开辟空间node->data = data;//新节点的data域等于原先链表头节点的data域 node->next = NULL;//尾插的新节点next为空list = list->next;//原先头节点往后延续while (list->next) {//判断是否到了最后list = list->next;}list->next = node;//先将头节点指针指向最后 头节点的下一个等于新插入的node节点head->data++;
}删除:
void Delete(Node* list, int data){//删除Node* head = list;Node* pre = list;Node* current = list->next;list = list->next;while (current)//循环遍历到最后{if (current->data == data)//判断与删除元素是否相等{pre->next = current->next;free(current);//删除结点break;//找到则跳出循环}pre = current;//向下遍历current = current->next;}list->data--;
}遍历操作:
void printList(Node* list) {//遍历操作list = list->next;//向后遍历while (list)//判空循环{printf("%d ", list->data);list = list->next;}printf("\n");
}main函数:
int main()
{Node* list = initList();headInsert(list, 1);headInsert(list, 2);headInsert(list, 3);headInsert(list, 4);headInsert(list, 5);tailInsert(list, 6);tailInsert(list, 7);tailInsert(list, 8);tailInsert(list, 9);tailInsert(list, 10);printList(list);Delete(list, 5);printList(list);Delete(list, 10);printList(list);Delete(list, 6);printList(list);return 0;
}整体函数:
typedef struct Node {//定义一个结构体int data;struct Node* next;
}Node;Node* initList() {//初始化一个链表Node* list = (Node*)malloc(sizeof(Node));list->data = 0;list->next = NULL;return list;
}void headInsert(Node* list,int data){//头插法Node* node = (Node*)malloc(sizeof(Node));node->data = data;node->next = list->next;list->next = node;list->data++;//代表当前链表之中插入元素
}void tailInsert(Node* list, int data){//尾插法Node* head = list;Node* node = (Node*)malloc(sizeof(Node));node->data = data;node->next = NULL;list = list->next;while (list->next) {list = list->next;}list->next = node;head->data++;
}void Delete(Node* list, int data){//删除Node* head = list;Node* pre = list;Node* current = list->next;list = list->next;while (current){if (current->data == data){pre->next = current->next;free(current);break;}pre = current;current = current->next;}list->data--;
}void printList(Node* list) {//遍历操作list = list->next;while (list){printf("%d ", list->data);list = list->next;}printf("\n");
}int main()
{Node* list = initList();headInsert(list, 1);headInsert(list, 2);headInsert(list, 3);headInsert(list, 4);headInsert(list, 5);tailInsert(list, 6);tailInsert(list, 7);tailInsert(list, 8);tailInsert(list, 9);tailInsert(list, 10);printList(list);Delete(list, 5);printList(list);Delete(list, 10);printList(list);Delete(list, 6);printList(list);return 0;
}运行结果:
相关文章:
数据结构 2.1 单链表
1.单链表 线性表:1.有限的序列 2.序列中的每一个元素都有唯一的前驱和后继,除了开头和结尾的两个节点。 顺序表:分配一块连续的内存去存放这些元素,eg、数组 链表:内存是不连续的,元素会各自被分配一块内…...
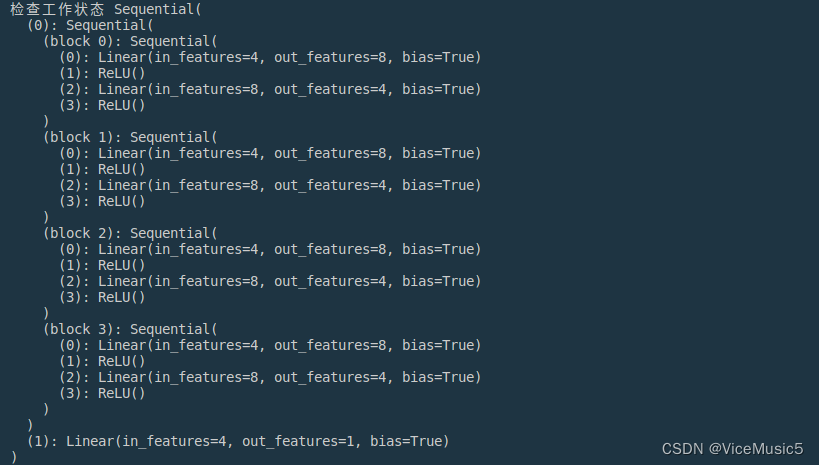
[Machine Learning]pytorch手搓一个神经网络模型
因为之前虽然写过一点点关于pytorch的东西,但是用的还是他太少了。 这次从头开始,尝试着搓出一个神经网络模型 (因为没有什么训练数据,所以最后的训练部分使用可能不太好跑起来的代码作为演示,如果有需要自己连上数据…...
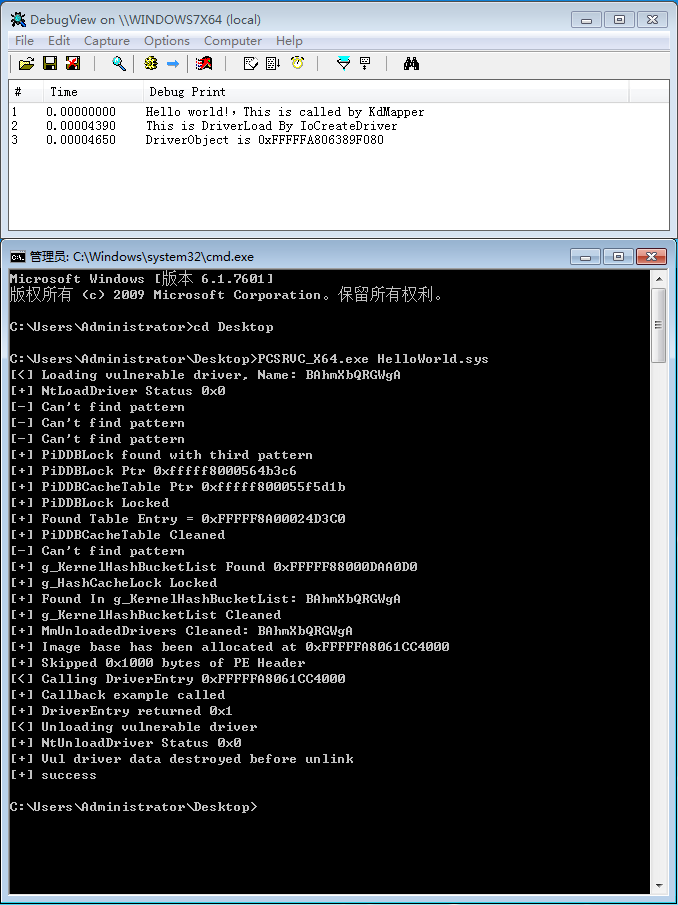
KdMapper扩展实现之Dell(pcdsrvc_x64.pkms)
1.背景 KdMapper是一个利用intel的驱动漏洞可以无痕的加载未经签名的驱动,本文是利用其它漏洞(参考《【转载】利用签名驱动漏洞加载未签名驱动》)做相应的修改以实现类似功能。需要大家对KdMapper的代码有一定了解。 2.驱动信息 驱动名称pcds…...

python和go相互调用的两种方法
前言 Python 和 Go 语言是两种不同的编程语言,它们分别有自己的优势和适用场景。在一些项目中,由于团队内已有的技术栈或者某一部分业务的需求,可能需要 Python 和 Go 相互调用,以此来提升效率和性能。 性能优势 Go 通常比 Python 更高效&…...

c# 分部视图笔记
Html.Partial("**", 1) public ActionResult **(int page) { ViewBag.page page; return PartialView("**"); }...

Vue3最佳实践 第七章 TypeScript 中
Vue组件中TypeScript 在Vue组件中,我们可以使用TypeScript进行各种类型的设置,包括props、Reactive和ref等。下面,让我们详细地探讨一下这些设置。 设置描述设置props在Vue中,props本身就具有类型设定的功能。但如果你希望使用Ty…...
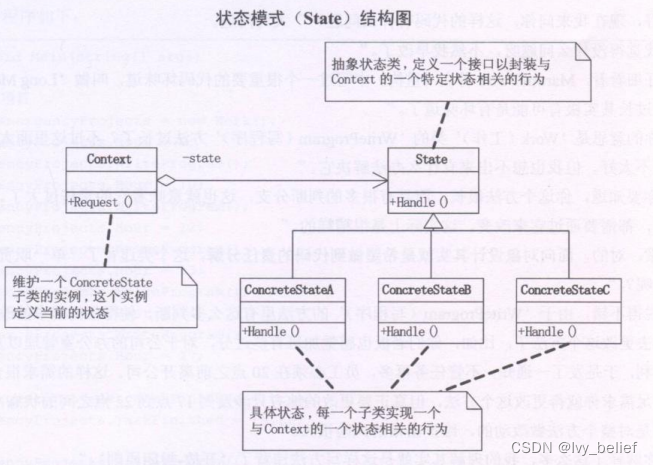
(三)行为模式:8、状态模式(State Pattern)(C++示例)
目录 1、状态模式(State Pattern)含义 2、状态模式的UML图学习 3、状态模式的应用场景 4、状态模式的优缺点 (1)优点 (2)缺点 5、C实现状态模式的实例 1、状态模式(State Pattern&#x…...
)
nginx的配置文件概述及简单demo(二)
默认配置文件 当安装完nginx后,它的目录下通常有默认的配置文件 #user nobody; worker_processes 1;#error_log logs/error.log; #error_log logs/error.log notice; #error_log logs/error.log info;#pid logs/nginx.pid;events {worker_connection…...
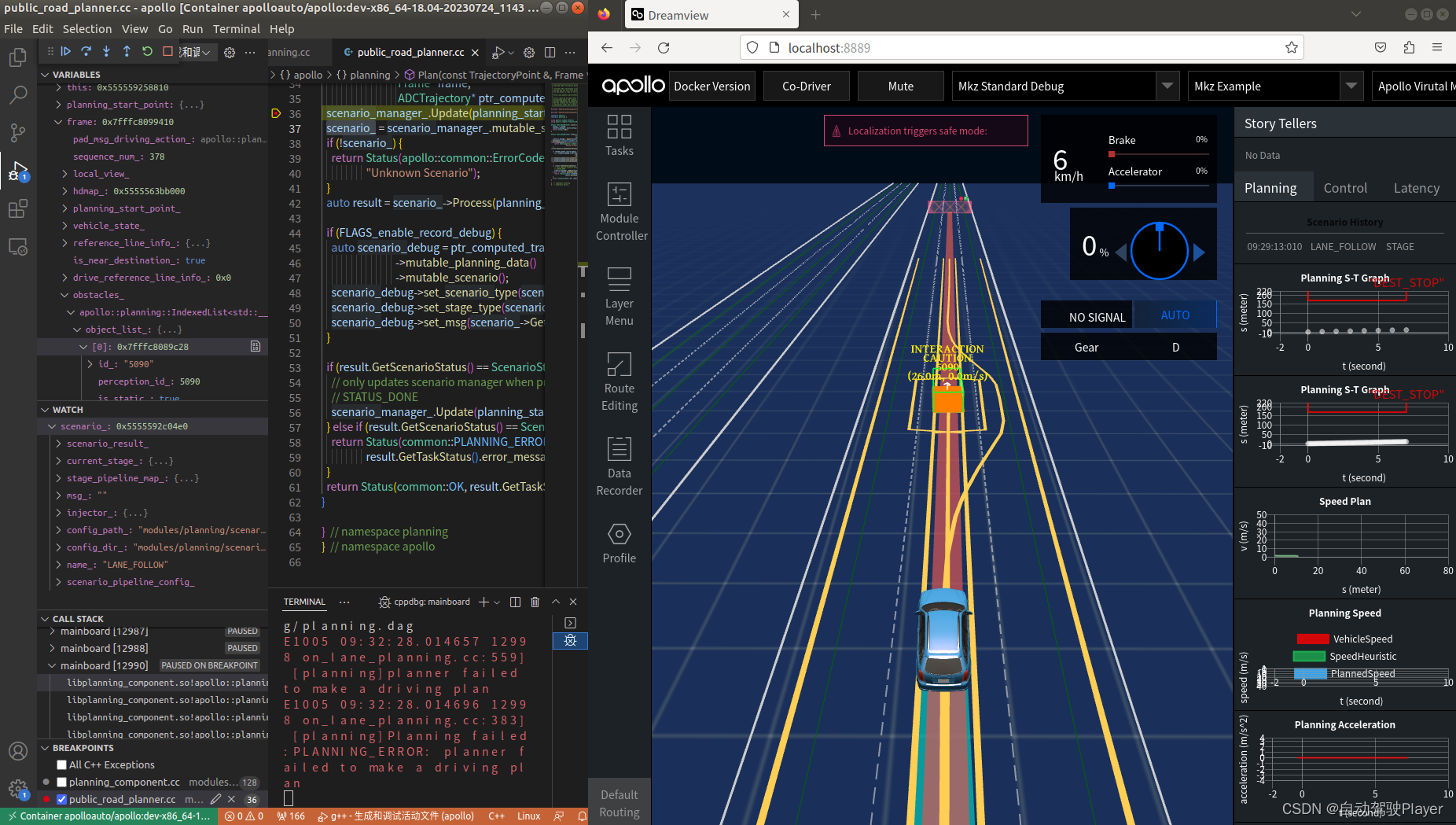
Apollo Planning2.0决策规划算法代码详细解析 (2): vscode gdb单步调试环境搭建
前言: apollo planning2.0 在新版本中在降低学习和二次开发成本上进行了一些重要的优化,重要的优化有接口优化、task插件化、配置参数改造等。 GNU symbolic debugger,简称「GDB 调试器」,是 Linux 平台下最常用的一款程序调试器。GDB 编译器通常以 gdb 命令的形式在终端…...
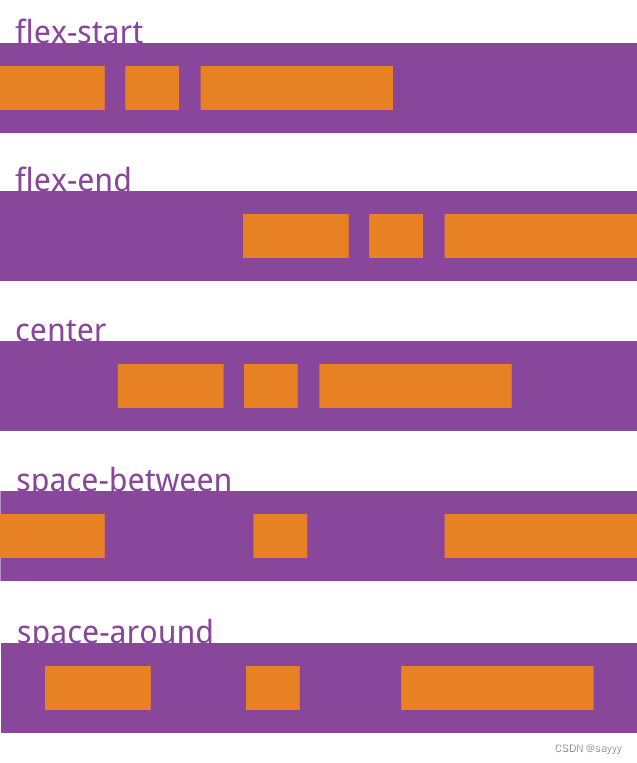
flex 布局:元素/文字靠右
前言 略 使用flex的justify-content属性控制元素的摆放位置 靠右 <view class"more">展开更多<text class"iconfont20231007 icon-zhankai"></text></view>.more {display: flex;flex-direction: row;color: #636363;justify-co…...
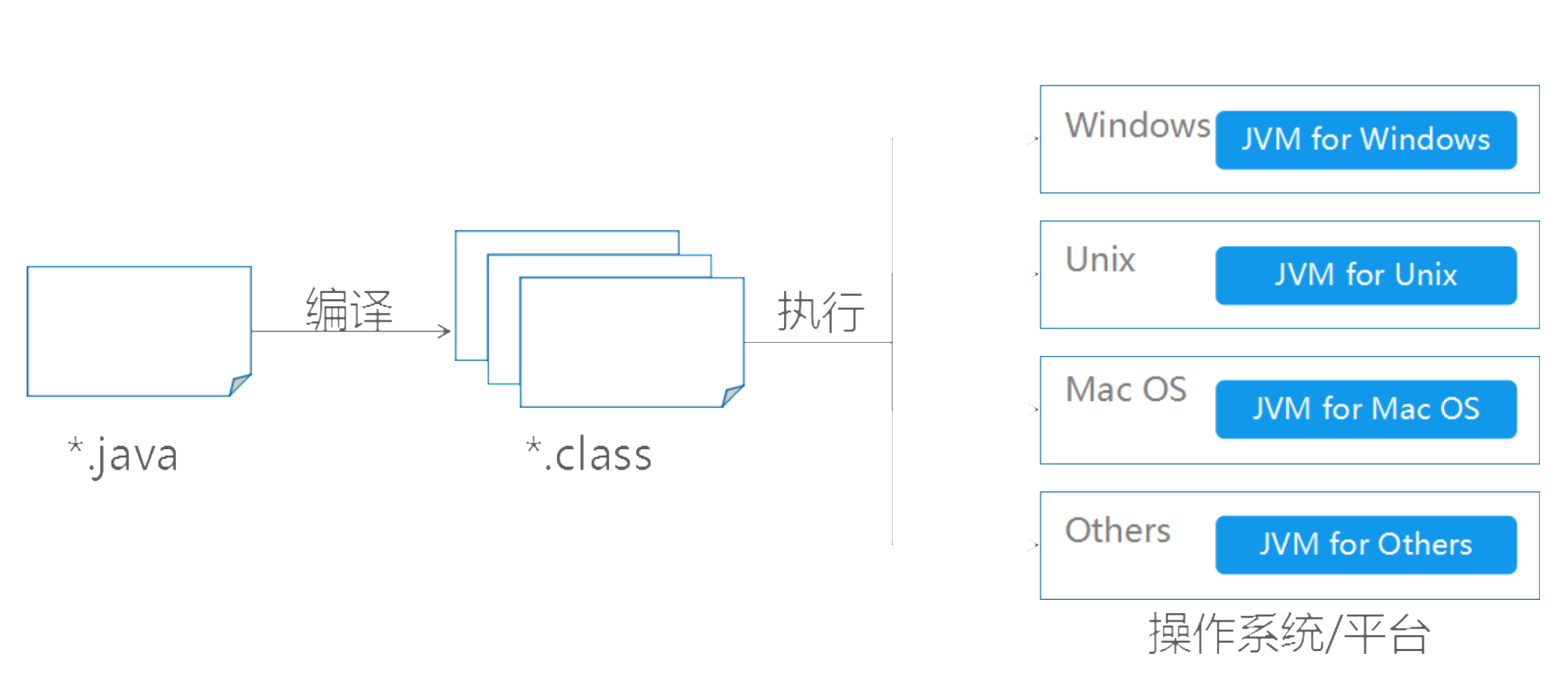
java基础-第1章-走进java世界
一、计算机基础知识 常用的DOS命令 二、计算机语言介绍 三、Java语言概述 四、Java环境的搭建 JDK安装图解 环境变量的配置 配置环境变量意义 配置环境变量步骤 五、第一个Java程序 编写Java源程序 编译Java源文件 运行Java程序 六、Java语言运行机制 核心机制—Java虚拟机 核…...

jvm 堆内存 栈内存 大小设置
4种方式配置不同作用域的jvm的堆栈内存。 1、Eclise 中设置jvm内存: 改动eclipse的配置文件,对全部project都起作用 改动eclipse根文件夹下的eclipse.ini文件 -vmargs //虚拟机设置 -Xms40m //初始内存 -Xmx256m //最大内存 -Xmn16m //最小内存 -XX:PermSize=128M //非堆内…...
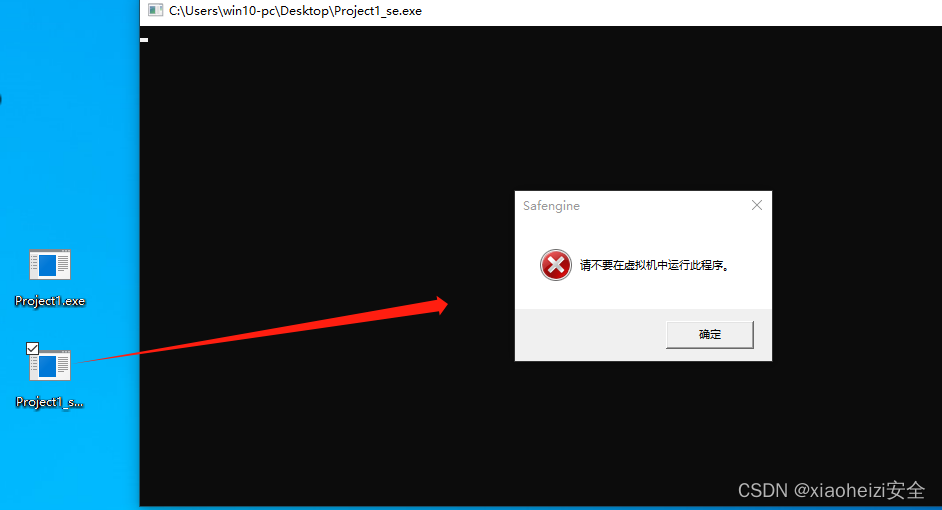
免杀对抗-反沙盒+反调试
反VT-沙盒检测-Go&Python 介绍: 近年来,各类恶意软件层出不穷,反病毒软件也更新了各种检测方案以提高检率。 其中比较有效的方案是动态沙箱检测技术,即通过在沙箱中运行程序并观察程序行为来判断程序是否为恶意程序。简单来说…...

QTimer类的使用方法
本文介绍QTimer类的使用方法。 1.单次触发 在某些情况下,定时器只运行一次,可使用单次触发方式。 QTimer *timer new QTimer(this); connect(timer, &QTimer::timeout, this, &MainWindow::timeout); timer->setSingleShot(true); timer-…...
行为模式:9、空对象模式(Null Object Pattern)(C++示例))
(三)行为模式:9、空对象模式(Null Object Pattern)(C++示例)
目录 1、空对象模式(Null Object Pattern)含义 2、空对象模式的主要涉及以下几个角色 3、空对象模式的应用场景 4、空对象模式的优缺点 (1)优点 (2)缺点 5、C实现空对象模式的实例 1、空对象模式&am…...

Django实战项目-学习任务系统-用户登录
第一步:先创建一个Django应用程序框架代码 1,先创建一个Django项目 django-admin startproject mysite将创建一个目录,其布局如下:mysite/manage.pymysite/__init__.pysettings.pyurls.pyasgi.pywsgi.py 2,再创建一个…...
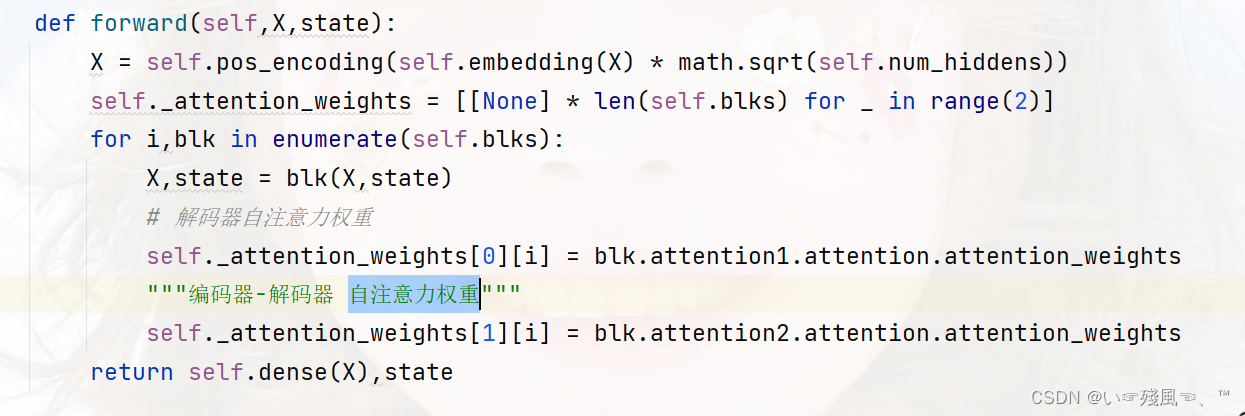
【动手学深度学习-Pytorch版】Transformer代码总结
本文是纯纯的撸代码讲解,没有任何Transformer的基础内容~ 是从0榨干Transformer代码系列,借用的是李沐老师上课时讲解的代码。 本文是根据每个模块的实现过程来进行讲解的。如果您想获取关于Transformer具体的实现细节(不含代码)可…...

做外贸独立站选Shopify还是WordPress?
现在确实会有很多新人想做独立站,毕竟跨境电商平台内卷严重,平台规则限制不断升级,脱离平台“绑架”布局独立站,才能获得更多流量、订单、塑造品牌价值。然而,在选择建立外贸独立站的过程中,选择适合的建站…...
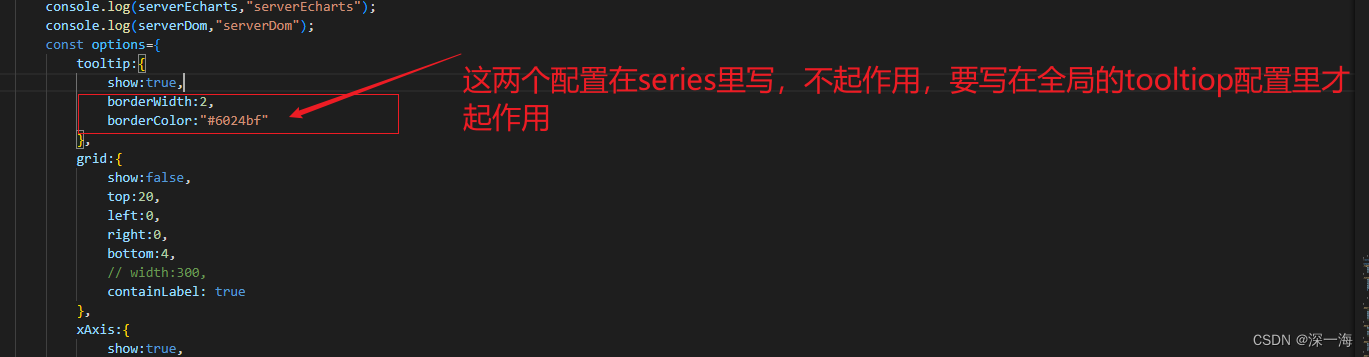
echarts的bug,在series里写tooltip,不起作用,要在全局先写tooltip:{}才起作用,如果在series里写的不起作用就写到全局里
echarts的bug,在series里写tooltip,不起作用,要在全局先写tooltip:{show:true}才起作用,如果在series里写的不起作用就写到全局里 series里写tooltip不起作用,鼠标悬浮在echarts图表上时不显示提示 你需要…...

jmeter分布式压测
一、什么是压力测试? 压力测试(Stress Test),也称为强度测试、负载测试,属于性能测试的范畴。 压力测试是模拟实际应用的软硬件环境及用户使用过程的系统负荷,长时间或超大负荷地运行被测软件系统ÿ…...

PostgreSQL 与 MySQL InnoDB 隔离级别 MVCC 核心对比
一、数据库标准四大隔离级别 SQL 标准定义 4 个隔离级别,从低到高: 读未提交(Read Uncommitted)读已提交(Read Committed,RC)可重复读(Repeatable Read,RR)串…...

PP 蜂窝板挤出成型核心原理与关键设备解析
PP 蜂窝板挤出成型核心原理与关键设备解析一、PP 蜂窝板材料特性与成型难点PP(聚丙烯)蜂窝板兼具质轻、高刚性、耐水防潮、可循环四大优势,在物流、建筑、车厢、包装领域替代传统实心板材趋势明显。 其成型难点集中在:蜂窝芯超薄、…...

【数字孪生实战案例】怎样设置数据筛选条件,精准控制电子地图飞线的呈现效果?~山海鲸可视化
在数据可视化大屏应用里,电子地图飞线是展示跨地域关联数据的重要载体。当飞线数据量大、维度繁杂时,通过配置数据条件对地图飞线做精准筛选,能够过滤冗余信息、聚焦核心数据,让地图呈现更简洁直观,有效提升整体可视化…...

终极指南:如何在Windows上使用智能PPT计时器掌控演示时间
终极指南:如何在Windows上使用智能PPT计时器掌控演示时间 【免费下载链接】ppttimer 一个简易的 PPT 计时器 项目地址: https://gitcode.com/gh_mirrors/pp/ppttimer 您是否曾在重要演讲中因为超时而尴尬收场?是否在商务汇报中因为时间把控不准而…...

超声引导手术中的‘呼吸’难题:我们如何用体外标记法搞定肝部超声-CT的实时配准?
超声与CT影像实时配准:破解呼吸运动干扰的临床实战方案 在肝癌射频消融或穿刺活检手术中,影像引导的精准度直接决定治疗效果。超声凭借其实时性成为首选引导工具,但图像质量局限常需与高分辨率的CT影像融合。这一过程中,呼吸运动导…...

AI辅助开发工作流:用免费代理优化付费工具,提升代码生成效率
1. 项目概述:用免费AI代理优化付费AI工具的开发工作流如果你和我一样,订阅了Claude Pro或者GitHub Copilot,但每个月看着额度条飞速见底,心里总有点发慌,那这篇文章就是为你准备的。我们不是在讨论哪个AI写代码更强&am…...

Task GCP终极指南:如何在谷歌云平台上实现高效任务调度与自动化构建 [特殊字符]
Task GCP终极指南:如何在谷歌云平台上实现高效任务调度与自动化构建 🚀 【免费下载链接】task A fast, cross-platform build tool inspired by Make, designed for modern workflows. 项目地址: https://gitcode.com/gh_mirrors/ta/task 在现代化…...

PICAXE单片机驱动DS18B20温度传感器:从硬件连接到数据处理
1. 项目概述:用PICAXE玩转DS18B20数字温度传感器如果你手头有一块PICAXE单片机,想快速实现一个温度监测项目,那么DS18B20这颗数字温度传感器绝对是你的绝佳拍档。它只需要一根数据线就能和MCU通信,抗干扰能力强,还能通…...

Amphenol ICC RJE1Y33A53162401网线组件解析与替代思路
在工业通信、服务器互联以及智能设备网络连接场景中,RJ45类线束组件一直是不可忽视的重要组成部分。近期不少工程师在项目选型时关注到 Amphenol ICC 推出的 RJE1Y33A53162401 线束组件。本文就围绕这款型号,从产品特点、应用方向、选型思路以及兼容替代…...

CMOS闩锁效应原理与防护设计实践
1. 闩锁效应基础原理剖析闩锁效应(Latch-up)是CMOS集成电路设计中最为棘手的可靠性问题之一。这种现象本质上是由芯片内部寄生形成的PNP-NPN晶体管对构成的晶闸管结构(SCR)被意外触发导致的。当特定条件满足时,这些寄生元件会形成正反馈回路,导致电源与地…...