【深蓝学院】手写VIO第2章--IMU传感器--作业
这次作业坑很多,作业说明的不清楚,摸索了很长时间才将此次作业完成,在这里进行记录。
1. T1
1.1 题干
1.2 解答
1.2.1 法1,ros related方法
不知道为什么我的launch不了,在imu_utils目录下面建立build后,cmake,make install之后出现了imu_an的可执行文件(经常会出现找不到已经生成的文件,需要重新打开一个terminal再来看行不行)
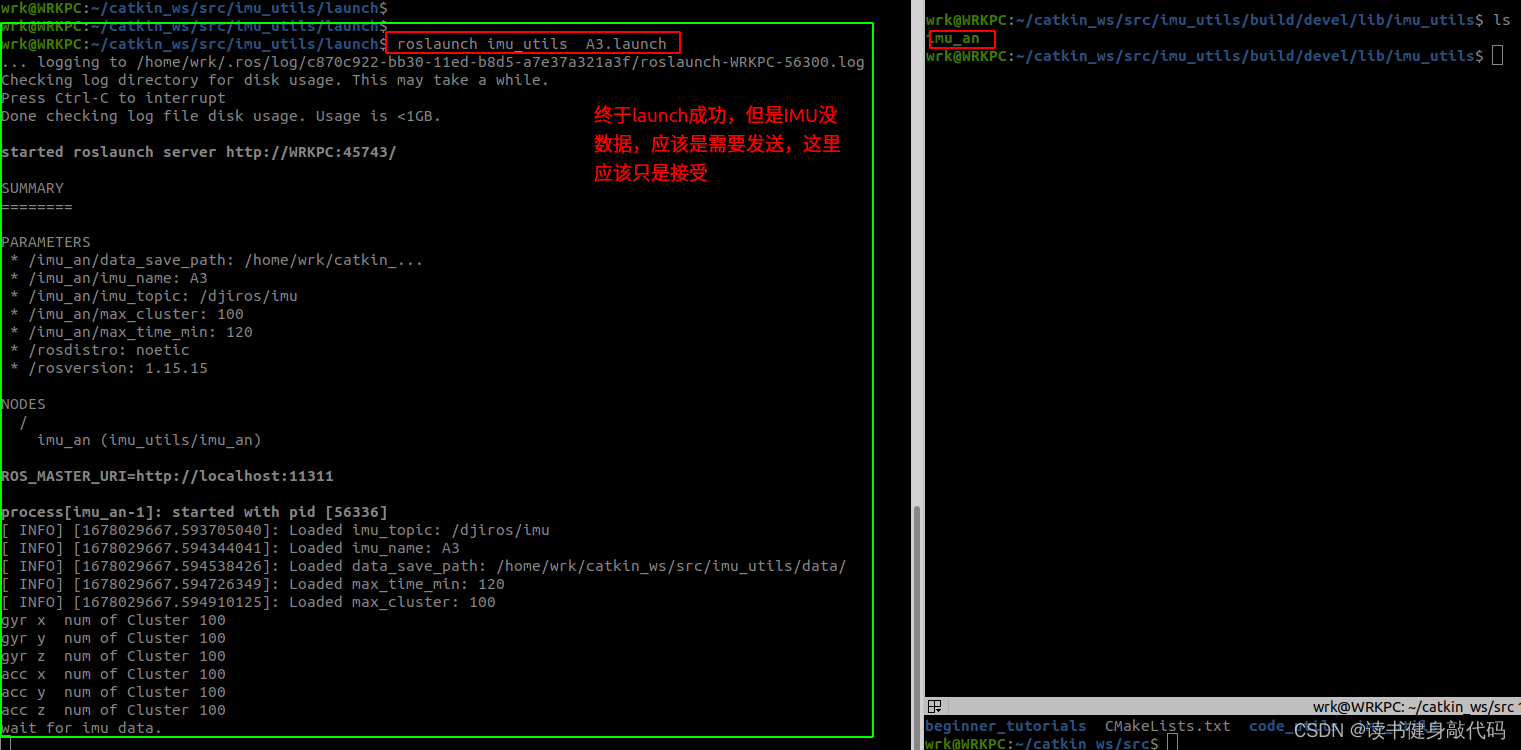
在下面也证实了这个imu_an是subscribe了一个topic,
得看这个topic在哪里发送(或者说这仅仅只是一个接受数据的东西,数据需要我们自己去采集,自己去发送对应的topic,需要继续了解rosplay是干什么用的)

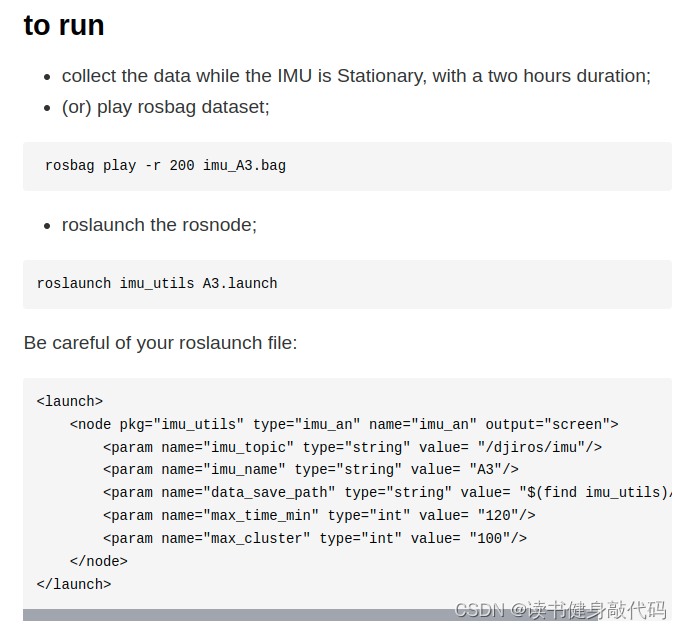
所以按照imu_utils的markdown说明的,就是把roslaunch起来,subscribe对应的topic,然后使用 rosbag play发送或者实际的采集数据(采集数据肯定要发送topic),所以就跑成了,跑完之后就完成了IMU的Acc和Gyro的高斯白噪声和bias协方差的标定,结果见下图(以imu_a3.bag为例):
Gyro标定结果:
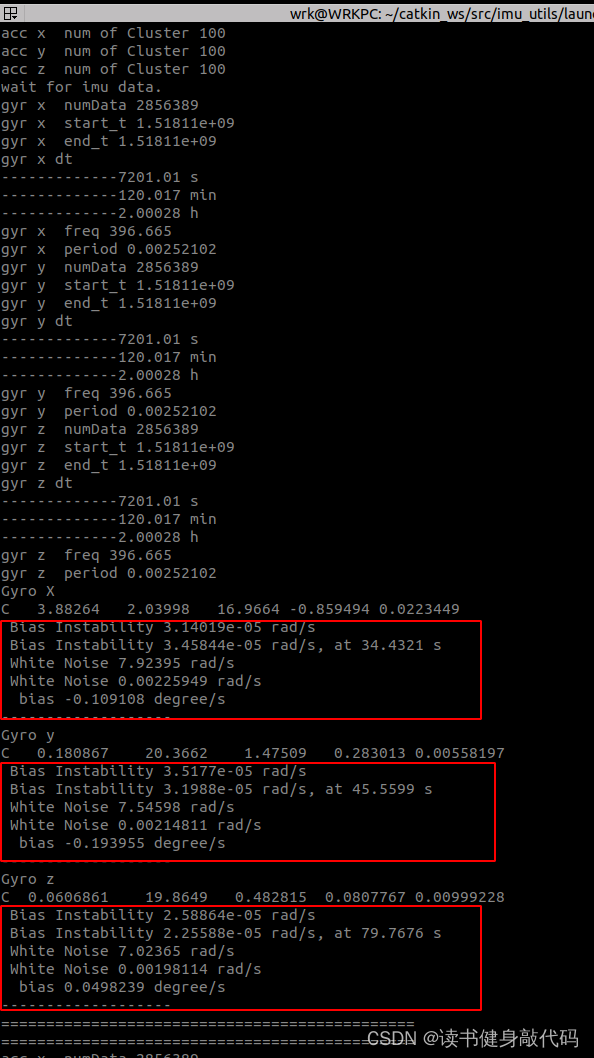
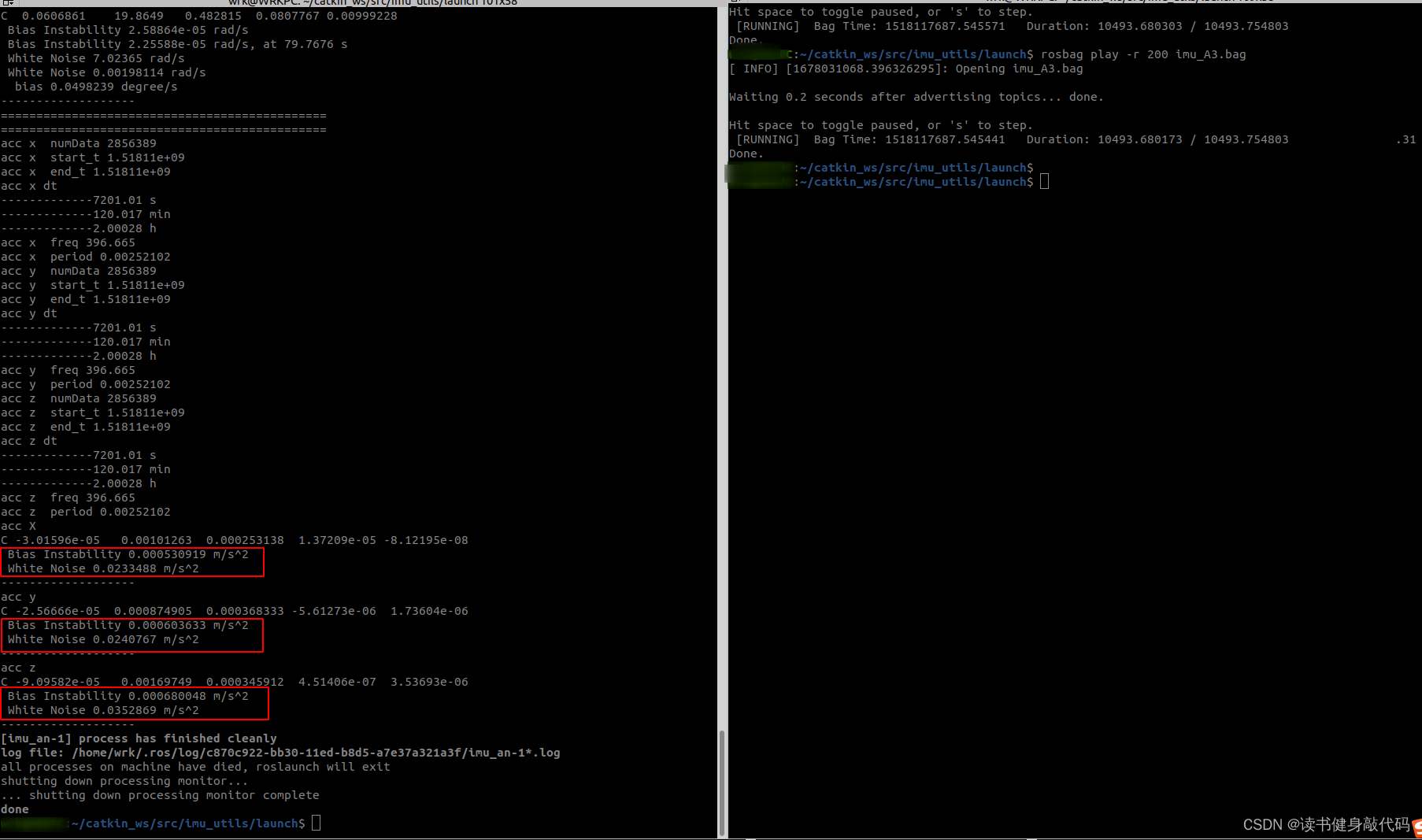
Acc标定结果:
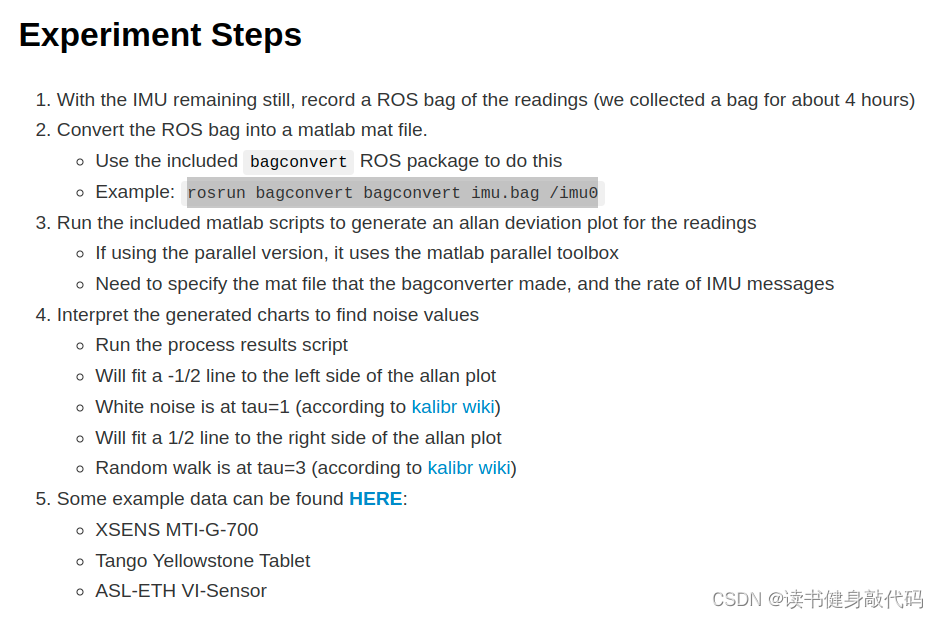
1.2.1 法2,kalibr_allan工具法
作业中没有对使用kalibr_allan的整个流程进行介绍,这里进行梳理:
- 使用IMU仿真程序生成imu.bag数据(编译vio_data_simulation工程并运行生成)
- 使用bagconvert ros package将生成的imu.bag数据转换成.mat文件用于kalibr_allan使用
- 在matlab下使用kalibr_allan中的matlab程序和转换成的.mat文件进行IMU的标定。
1. vio_data_simulation
mkdir vio_sim_ws/src
cd src
git clone https://github.com/HeYijia/vio_data_simulation
git checkout ros_version
catkin_make
由于我catkin_make有一些问题,这里也可以直接使用cmake的方法进行编译,编译完之后生成文件在devel/lib/vio_data_simulation下会生成node的可执行文件

直接执行之后就会生成imu的仿真数据:

以上数据用于第三步的kalibr_allan标定使用。
下面的数据用于可视化使用:
关于仿真数据的可视化,是编译cmake编译这个工程生成可执行文件data_gen,执行这个可执行文件就生成各种.txt文件,下面的可视化就是基于生成的.txt文件进行的。
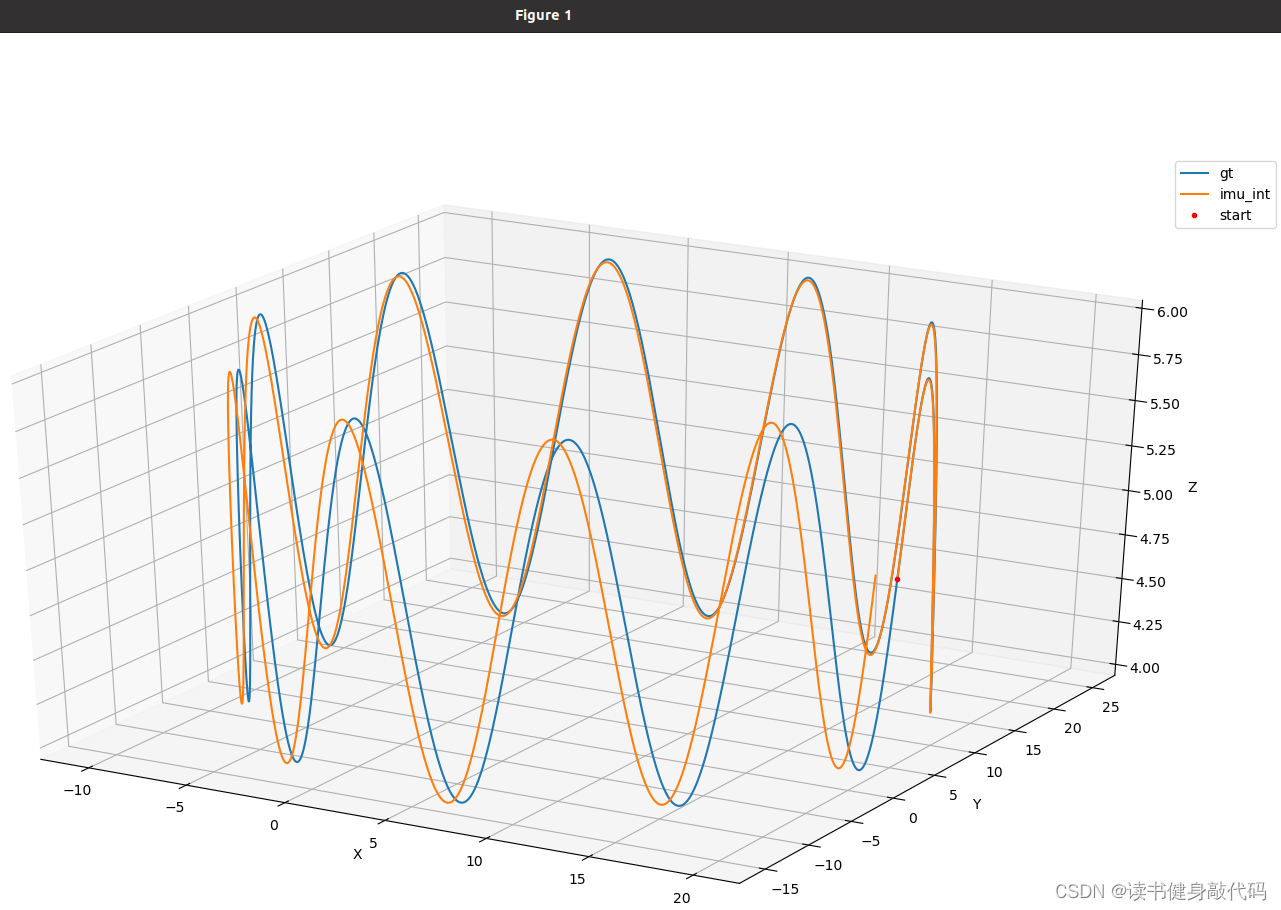
其中的数据仿真可视化可以用python_tool下的python脚本进行实现,都是基于matplotlib.pyplot实现的(话说好久没有碰python了),效果如下:
draw_trajectory.py(这个在第二题在更改积分方式的时候还会再使用)
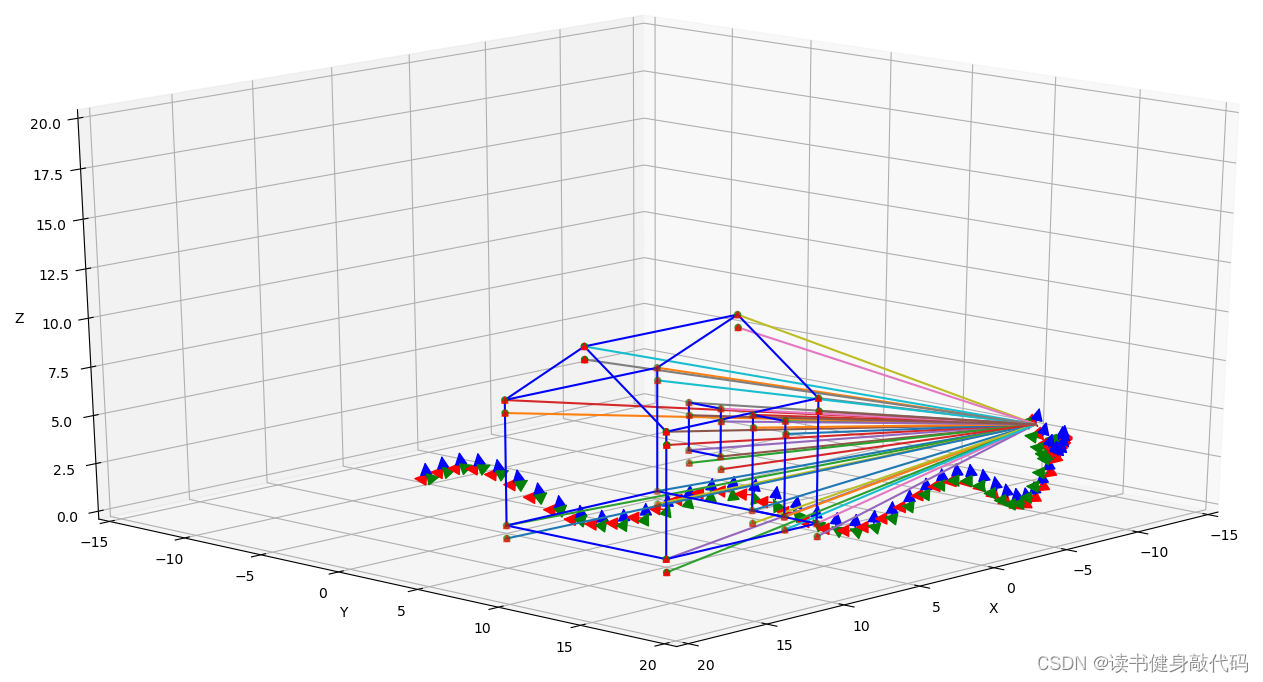
draw_points.py:是一个动态的
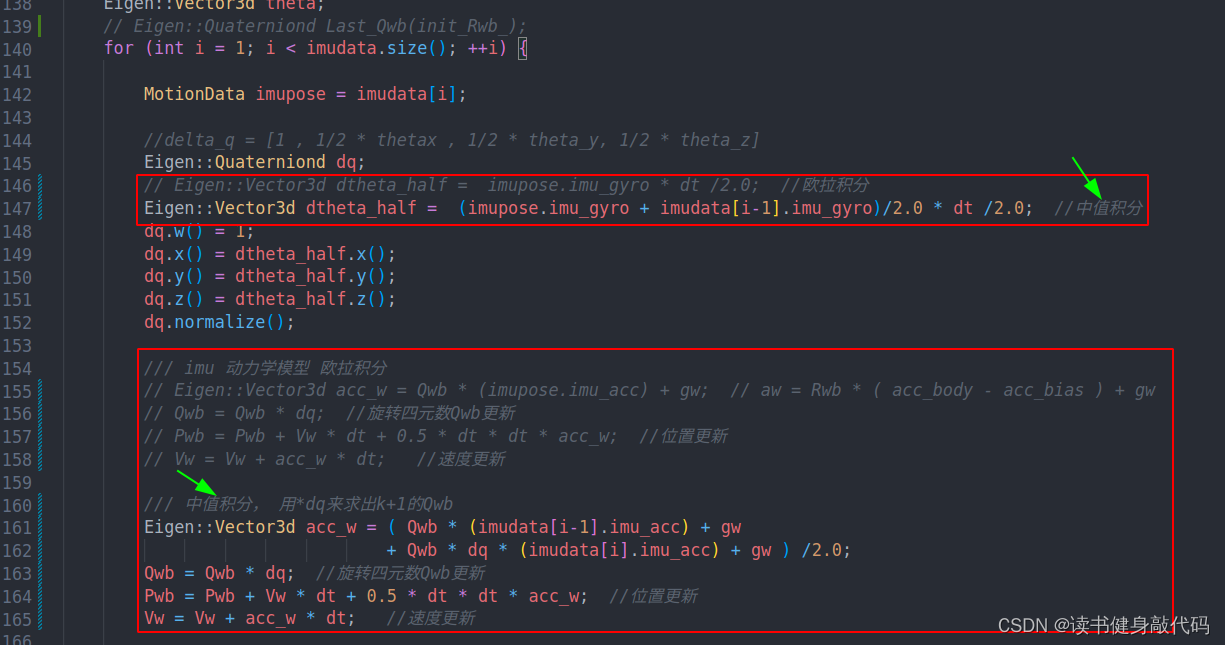
中值积分:
2. bagconvert
bagconvert同理也这样编译:

catkin_make有问题的话可以直接如下所示的将IMU数据转换成.mat文件
./bagconvert img.bag imu0

这个坑很大,md中没有说明白后面跟的参数的意义,看了代码才发现
说的后面跟三个参数:包名,bag名,bag中的topic名。
(第三个参数我开始以为是结果mat名字,搞了好久convert出来的mat都是177byte空的,matlab上跑SCRIPT当然跑不过,后来看了bagconvert的代码才发现三个参数的意义,对于不熟悉ros的同学来说真的很坑)

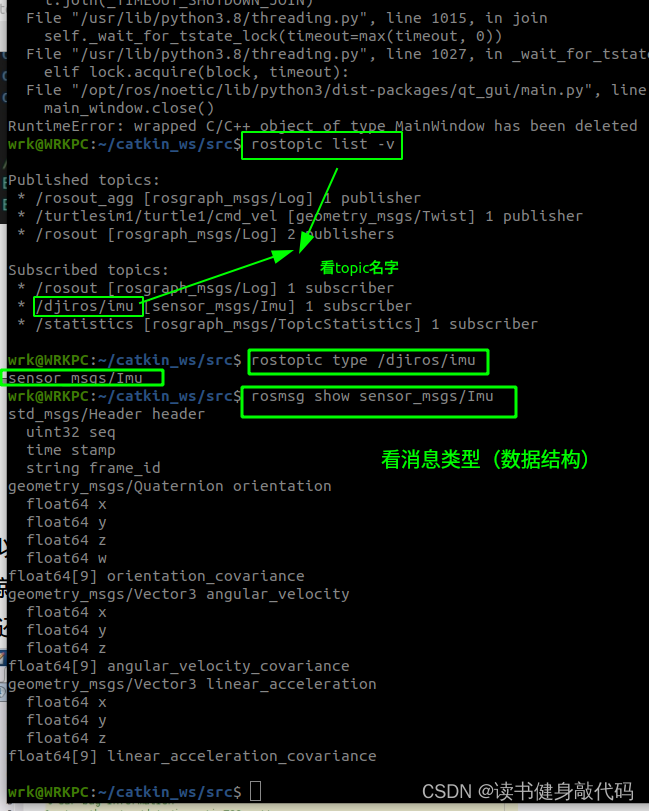
如果想简单地知道你的bag中的tpoic,可以直接打印出来
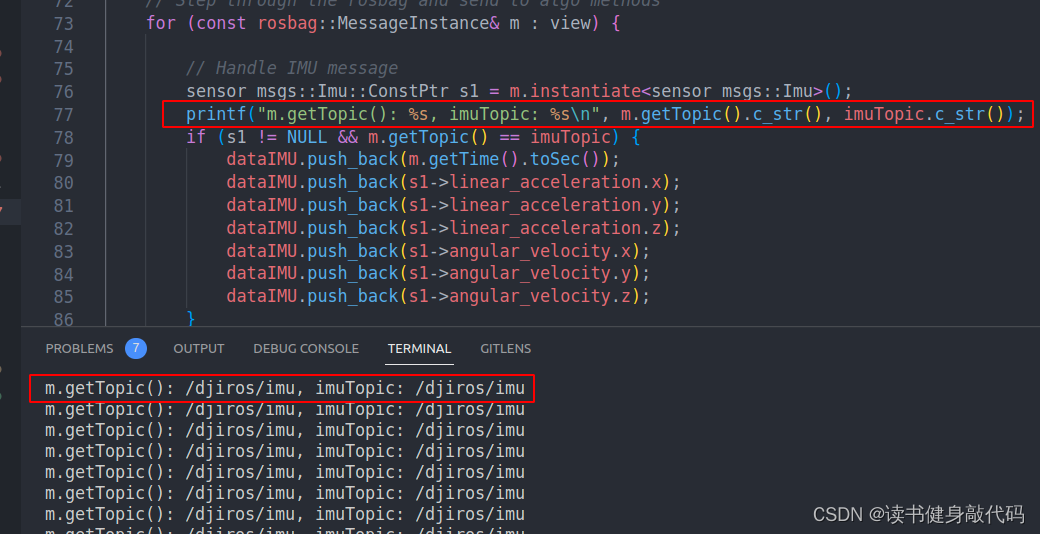
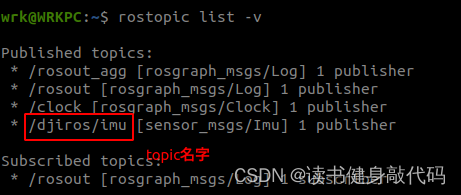
也可以像上面的rosrelated方法一样,把bag包play起来,然后查看此时的topic名字
rosbag play -r 200 imu_A3.bag
rostopic list -v
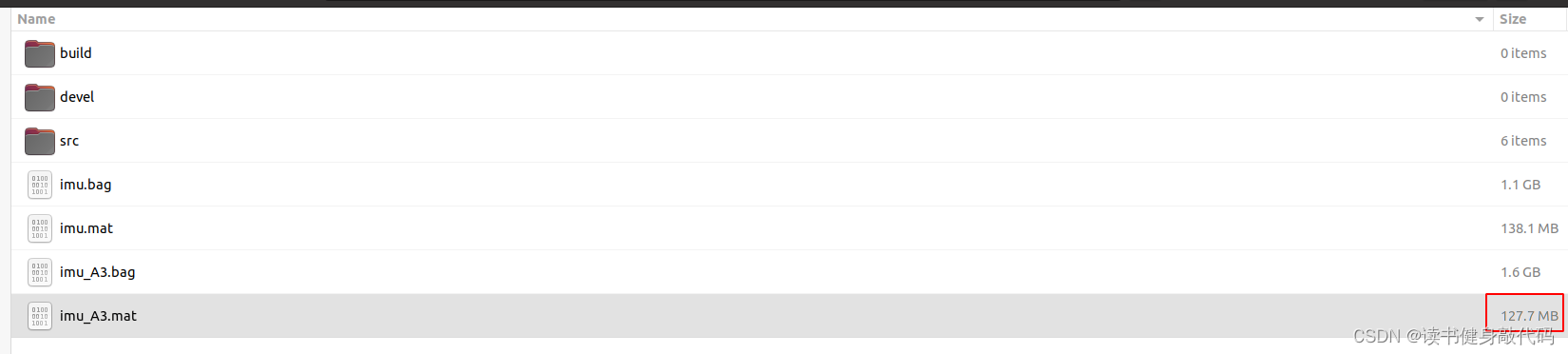
参数传递正确就能顺利的convert成mat文件了,大小也是正常的
rosrun bagconvert bagconvert ./imu_A3.bag /djiros/imu
3. kalibr_allan
首先看kalibr_all的md
需要安装Matlab,遂龟速安装中…
参考博客:Ubuntu20.04安装Matlab2021b
但是cmake不过,没有找到matlab中的mat.h,博客中说发现需要更改Findmatlab.cmake
修改~/catkin_ws/src/kalibr_allan-master/bagconvert/cmake目录下的FindMatlab.cmake,
找到 find_program(MATLAB_EXE_PATH matlab 这一行,将他修改成刚刚安装matlab的路径的bin路径find_program(MATLAB_EXE_PATH matlabPATHS /usr/local/MATLAB/R2021b/bin)
这样可以找到matlab
即可cmake通过。
后面发现没有安装parallel_compute(类似这个名称)的tool_box,查了一下,非正版的可以再用刚才的安装包重新安装,在安装界面可以选择需要安装的tool_box。
但是,我的电脑内存快爆了,matlab跑不出来,第一题就看看吧。知道有这个方法(折腾这么久,还是有点亏)
2. T2

欧拉积分:
中值积分重合效果很好:
代码改动部分:
可视化仿真:

3. T3
3.1 题干
将B Spline用代码实现,与上面的中值积分的效果进行对比。
3.2 解答
该部分还没做,后面会做。
相关文章:
【深蓝学院】手写VIO第2章--IMU传感器--作业
这次作业坑很多,作业说明的不清楚,摸索了很长时间才将此次作业完成,在这里进行记录。 1. T1 1.1 题干 1.2 解答 1.2.1 法1,ros related方法 不知道为什么我的launch不了,在imu_utils目录下面建立build后࿰…...

Android多线程学习:线程
一、概念 进程:系统资源分配的基本单位,进程之间相互独立,不能直接访问其他进程的地址空间。 线程:CPU调度的基本单位,线程之间共享所在进程的资源,包括共享内存,公有数据,全局变量…...
canvas 入门
canvas 入门 canvas是干什么的?canvas 绘制直线canvas画虚线canvas 绘制三角形canvas 绘制正方形canvas 绘制圆形、圆弧与椭圆canvas绘制文本canvas绘制图片 canvas是干什么的? <canvas> 是HTML5中的标签,它是一个容器,可以…...

建议收藏!混迹职场多年总结出的8大技巧!
1. 不要吃“哑巴”亏:不管在什么企业,一定要“会说话”,敢于表达自己,但是又兼顾身边人的感受,考虑好自己的言行将会带来的后果。良好的沟通技巧对于在职场中建立良好的人际关系和解决问题至关重要。学会倾听、表达和理…...
—— 视频和摄像头的加载、显示与保存)
OpenCV4(C++)—— 视频和摄像头的加载、显示与保存
文章目录 一、加载与显示二、保存 一、加载与显示 视频或摄像头的加载是使用 cv::VideoCapture 类。(这个类和 ifstream 类比较相似,视频或摄像头的加载和文本文件操作是大致相同。主要步骤:(1)加载(打开&a…...
编程笔记6-box的使用)
excel功能区(ribbonx)编程笔记6-box的使用
box元素用来在组里指定的控件周围放置一个可视的框,其主要目的是将控件作为一个单元组合在一起。 通常情况下,分配到组中的每个控件都被放置在先前的控件下面直到该列被填满,然后下一个控件被放置在其右侧列的顶行。然而,通过在框里面组合命令,可以将几个控件视作一个整体…...

oralce配置访问白名单的方法
目录 配置sqlnet.ora文件 重新加载使配置生效 注意事项 Oracle数据库安全性提升:IP白名单的配置方法 随着互联网的发展,数据库安全问题也越来越严重。Oracle是目前使用较为广泛的一款数据库管理系统,而IP白名单作为提升数据库安全性的有效…...

ToBeWritten之让响应团队参与并做好沟通
也许每个人出生的时候都以为这世界都是为他一个人而存在的,当他发现自己错的时候,他便开始长大 少走了弯路,也就错过了风景,无论如何,感谢经历 转移发布平台通知:将不再在CSDN博客发布新文章,敬…...
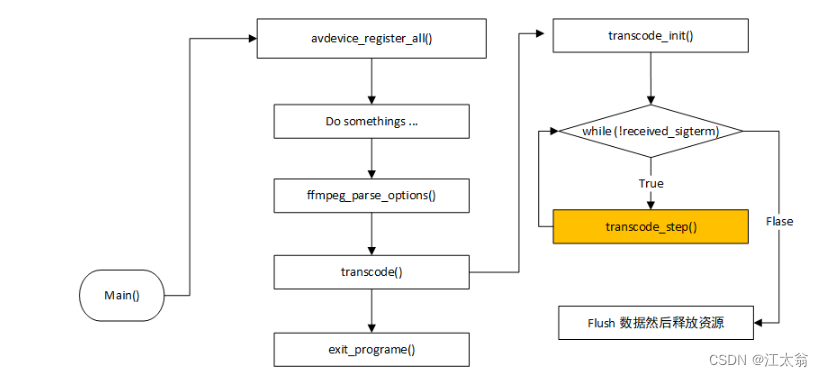
ffmpeg ts 关于av_seek_frame
1 ffmpeg命令行 一般对视频文件的裁剪 我们通过一行 ffmpeg命令行即可实现,比如 ffmpeg -ss 0.5 - t 3 - i a.mp4 vcodec copy b.mp4 其中 -ss 放置较前 开启精准seek定位 对于mp4而言 seek将从moov中相关索引表查找 0.5s时刻附近最近的关键帧 (此描述…...

【C++】set map 的底层封装
在了解底层封装之前除了对set和map的使用情况要有一定了解,还需要先学习一下二叉搜索树,AVL树,红黑树这些数据结构。 【C】二叉搜索树 【C】AVL树 & 红黑树 RBTree.h enum Colour {RED,BLACK };template<class T> class RBTreeNo…...

JavaWeb整体介绍
JavaWeb整体介绍 什么是Java Web Web:全球广域网,也称为万维网(www),能够通过浏览器访问的网站JavaWeb:是使用Java技术解决相关web互联网领域的技术栈(就是用java开发网站) 网页&a…...
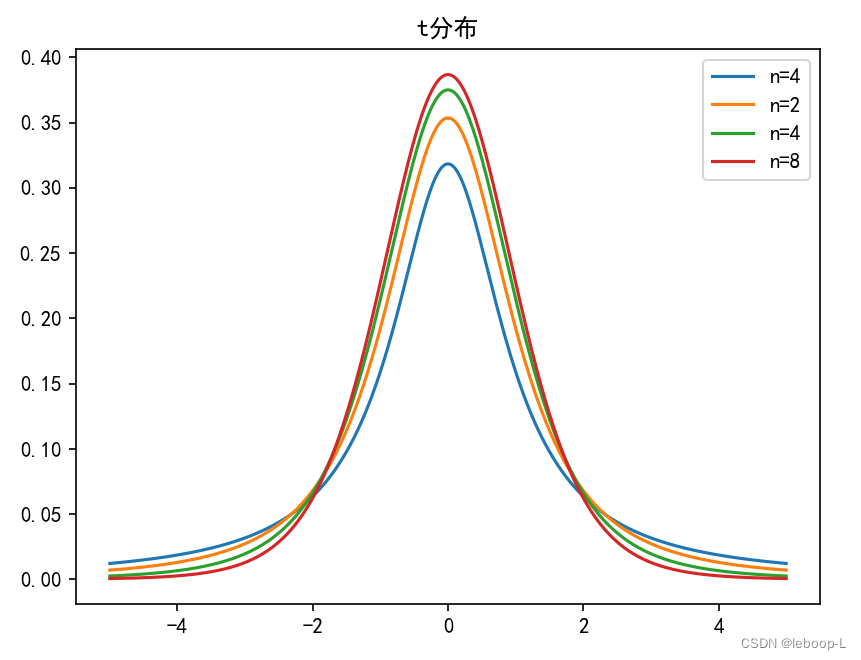
一些常见分布-正态分布、对数正态分布、伽马分布、卡方分布、t分布、F分布等
目录 正态分布 对数正态分布 伽马分布 伽马函数 贝塔函数 伽马分布 卡方分布 F分布 t分布 附录 参考文献 本文主要介绍一些常见的分布,包括正态分布、对数正态分布、伽马分布、卡方分布、F分布、t分布。给出了分布的定义,推导了概率密度函数&…...

科技云报道:押注向量数据库,为时过早?
科技云报道原创。 在大模型的高调火热之下,向量数据库也获得了前所未有的关注。 近两个月内,向量数据库迎来融资潮,Qdrant、Chroma、Weaviate先后获得融资,Pinecone宣布1亿美元B轮融资,估值达到7.5亿美元。 东北证券…...

铭控传感亮相2023国际物联网展,聚焦“多场景物联感知方案”应用
金秋九月,聚焦IoT基石技术,荟萃最全物联感知企业,齐聚IOTE 2023第20届国际物联网展深圳站。铭控传感携智慧楼宇,数字工厂,智慧消防,智慧泵房等多场景物联感知方案及多品类无线传感器闪亮登场,现…...

前端demo: 实现对图片进行上传前的压缩功能
前端可以使用canvas和File API来对图片进行压缩和缩放处理,以下是一个示例代码 : 压缩方法compressImg这段代码是实现对图片进行上传前的压缩功能 1. 定义了一个压缩图片的函数 compressImg,接受两个参数:file表示要压缩的文件,q…...
)
计算机网络(文章链接汇总)
参考引用 计算机网络微课堂-湖科大教书匠计算机网络(第7版)-谢希仁 计算机网络(一):概述计算机网络(二):物理层计算机网络(三):数据链路层计算机网…...

黑科技-Android
1热更新(热修复):apk不用发版,就能修复bug 原理:我们修复好了bug的时候,把那些有改动的java源码编译成class,再打包成dex,然后通过反射技术放到dexElements数组的最前面,…...
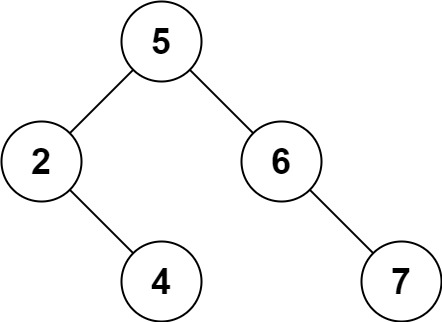
450. 删除二叉搜索树中的节点
给定一个二叉搜索树的根节点 root 和一个值 key,删除二叉搜索树中的 key 对应的节点,并保证二叉搜索树的性质不变。返回二叉搜索树(有可能被更新)的根节点的引用。 一般来说,删除节点可分为两个步骤: 首先…...

python安全工具开发基础
文章目录 拷贝、with、is深拷贝、浅拷贝with 三器一闭迭代器生成器闭包装饰器 动态绑定垃圾回收网络编程UdpTcp 协程mysql预处理防止注入 redis未授权/弱密码 拷贝、with 、is a [11, 22, 33] b [11, 22, 33] ca print(id(a)) print(id(b)) print(id(c))print(a b) print(…...

26 docker前后端部署
[参考博客]((257条消息) DockerNginx部署前后端分离项目(SpringBootVue)的详细教程_在docker中安装nginx实现前后端分离_这里是杨杨吖的博客-CSDN博客) (DockerNginx部署前后端分离项目(SpringBootVue)) 安装docker # 1、yum 包更新到最新 yum update # 2、安装需要的软件包…...

202X年CSDN年度技术趋势大预测
好的,以下是一篇关于CSDN年度技术趋势预测的技术文章大纲:202X年CSDN年度技术趋势预测:引领未来的技术变革一、引言技术发展的加速与变革年度技术趋势对行业的影响本文预测的依据与方法论二、人工智能与生成式AI的深化应用大模型技术的演进方…...

Java的Random类
在Java中,java.util.Random 类是日常开发中最常用的伪随机数生成器。它基于线性同余算法生成随机数,只要给定相同的初始值(种子 seed),就能生成完全相同的随机数序列。 🎲 Random 类的基础使用 使用 Random…...
人工智能的发展历程)
图解人工智能(10)人工智能的发展历程
人工智能自20世纪50年代发展至今,经历了若干次高潮和低谷。每到陷入困境的时候,总有一些科学家勇敢地打破传统思想的束缚,创造出新理论、新方法,使人工智能重现生机。例如,在符号主义陷入危机的时候,费根鲍…...

如何快速搭建AI聊天前端:SillyTavern完整教程与角色扮演系统指南
如何快速搭建AI聊天前端:SillyTavern完整教程与角色扮演系统指南 【免费下载链接】SillyTavern LLM Frontend for Power Users. 项目地址: https://gitcode.com/GitHub_Trending/si/SillyTavern 想象一下,你能够与任何AI角色进行沉浸式对话&#…...

对比自行维护与使用Taotoken在模型接入效率上的差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比自行维护与使用Taotoken在模型接入效率上的差异 在开发需要集成大语言模型能力的应用时,团队通常面临一个核心选择…...

为 OpenClaw 配置 Taotoken 以实现自动化工作流中的模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为 OpenClaw 配置 Taotoken 以实现自动化工作流中的模型调用 OpenClaw 是一款强大的自动化工作流工具,能够通过编排任务…...
轻量级车联网音视频集群)
基于 JTT1078MediaServer 的集群方案实践(Nginx + 溯源模式)轻量级车联网音视频集群
基于JTT1078MediaServer的集群方案实践(Nginx溯源模式)轻量级车联网音视频集群 在车联网JT/T1078音视频平台开发与部署中,单机JTT1078MediaServer在设备量少、并发低时可稳定运行,但随着接入设备增多、多路视频同时播放࿰…...
)
别再只会addItem了!QT QComboBox的5个高级用法与实战场景(含完整代码)
别再只会addItem了!QT QComboBox的5个高级用法与实战场景(含完整代码) 在QT开发中,QComboBox可能是最容易被低估的控件之一。很多开发者仅仅把它当作一个简单的下拉选择框,用addItem()填充几个静态选项就草草了事。但实…...

怎样3步掌握桌面自动化:智能鼠标键盘录制工具完整攻略
怎样3步掌握桌面自动化:智能鼠标键盘录制工具完整攻略 【免费下载链接】KeymouseGo 类似按键精灵的鼠标键盘录制和自动化操作 模拟点击和键入 | automate mouse clicks and keyboard input 项目地址: https://gitcode.com/gh_mirrors/ke/KeymouseGo Keymouse…...

冻|结D球 2026
通过网盘分享的文件:冻|结D球 2026 链接: https://pan.baidu.com/s/1-bhxibfD69ahEoufeQFRRQ?pwdhygv 提取码: hygv...