MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving
- MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving(基于神经辐射场的自动驾驶仿真器)
- https://github.com/OPEN-AIR-SUN/mars
- https://arxiv.org/pdf/2307.15058.pdf
- https://mp.weixin.qq.com/s/6Ion_DZGJwzs8JOoWMMbPw
1. 摘要
- 逼真的传感器仿真解决剩余corner case
- 3个工作
- 1.实例意识。作者的仿真器用独立的网络分别仿真前台实例和后台环境,以便可以分别控制实例的静态(例如大小和外观)和动态(例如轨迹)属性
- 2.模块化。作者的仿真器允许在不同的现代NeRF相关主干、采样策略、输入模式等之间灵活切换。希望这种模块化设计能促进给予NeRF的自动驾驶方针的学术进步和工业部署
- 3.现实。作者的仿真器设置了新的最先进的照片现实主义的结果给出了最佳的模块选择。
2. Nerf最新进展
2.1. Nerf:将场景表达为3D空间的场
-
(https://arxiv.org/pdf/2003.08934.pdf)
-
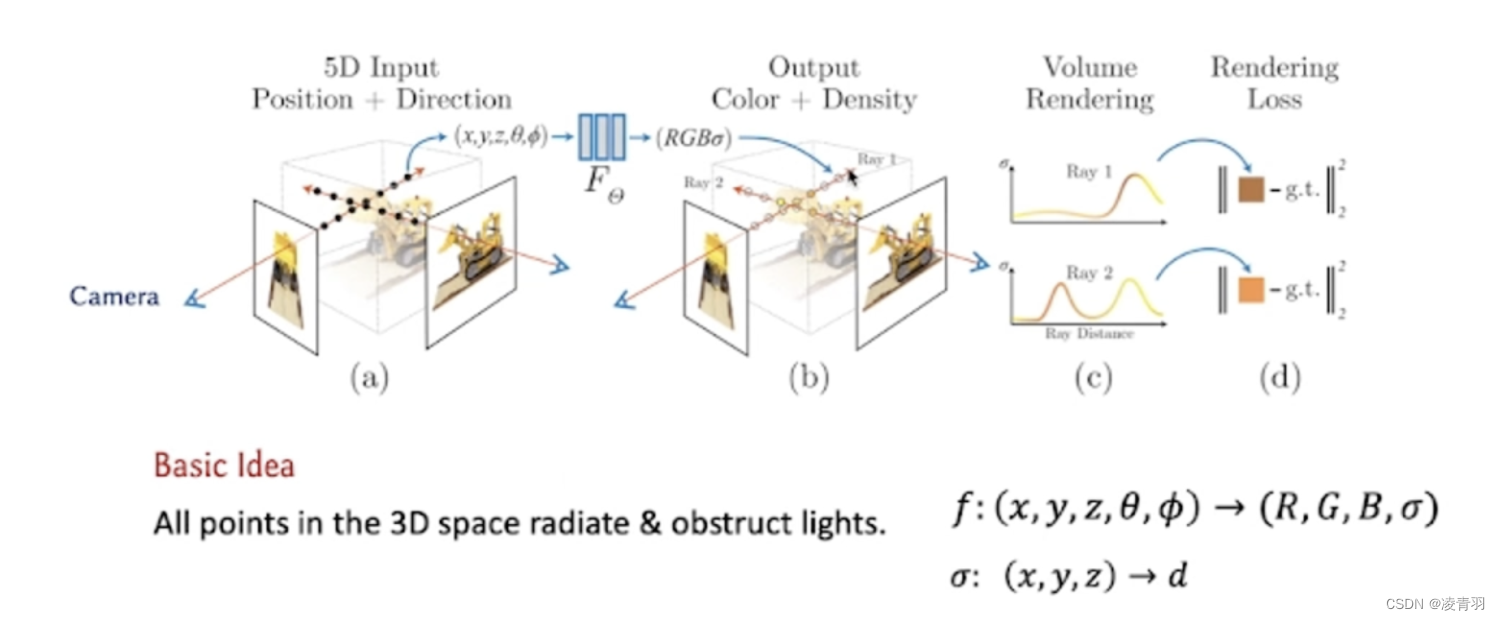
基本思想:3维空间,3D点都向外发射,并且具有一定的体积,可以阻挡其他方向的射线传播
-
将位置和观察角度 ( x , y , z , θ , ϕ ) (x,y,z,\theta,\phi) (x,y,z,θ,ϕ)转化为 ( R , G , B , δ ) (R,G,B,\delta) (R,G,B,δ),RGB和反射率
-
渲染出每个点的Color(RGB)+Density(阻挡能力),用渲染的颜色和原图颜色做loss
-
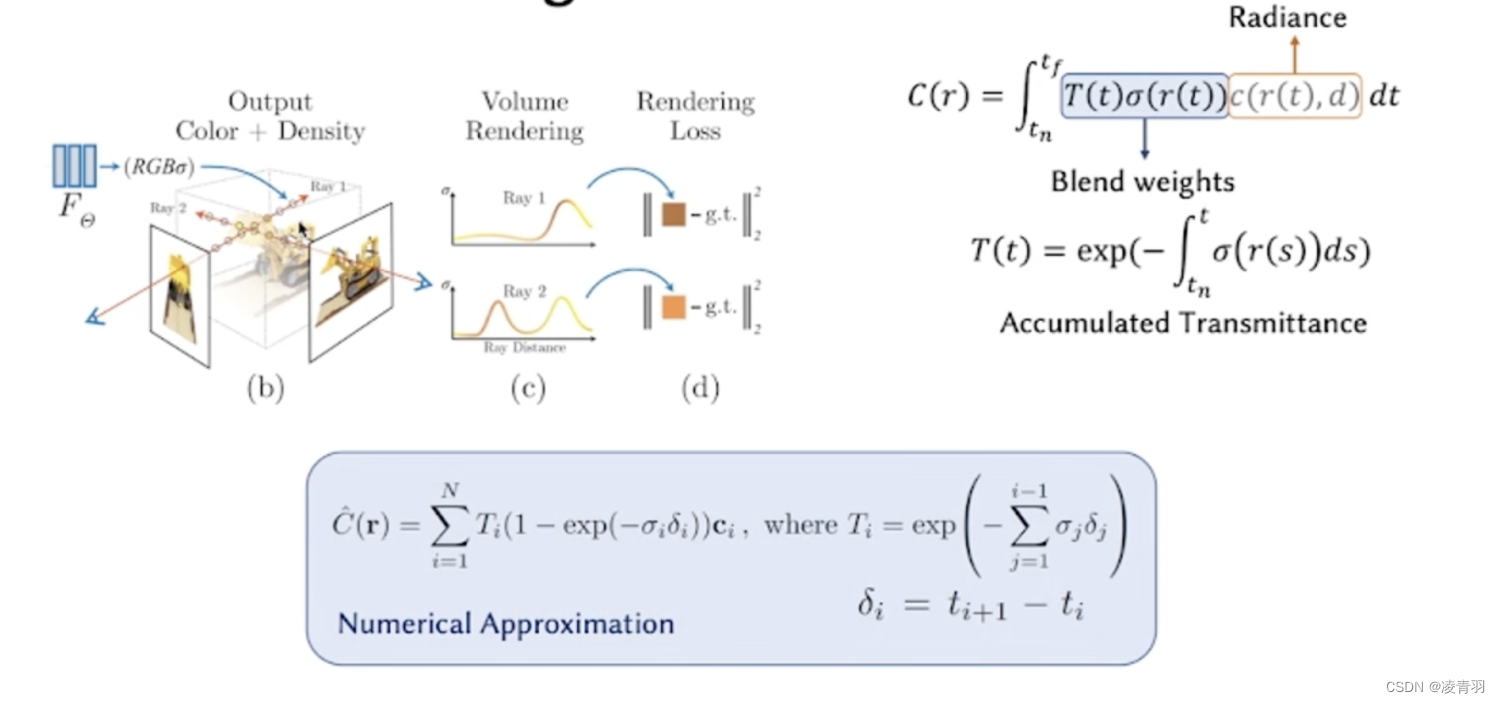
Blend weights:通过前面所有不透明度的积分得到当前点的积分
-
体渲染:将所有点从近到远排列到一块,利用Blend weights和积分得到当前点的渲染颜色
-
真实实现Nerf不用积分,计算量大
-
Nerf缺点:
- 训练慢:需要2~3天,渲染图要几十秒
- 渲染结果几何比较差
- 基于静态场景的假设,不适用动态场景(本文主要解决的问题)
2.2. 续改进论文:
-
instant ngp:https://nvlabs.github.io/instant-ngp/ https://github.com/NVlabs/instant-ngp
- 主要思想:不需要复杂的网络建模,只需要体素网格;大部分区域空洞,引入哈希表存储信息
- 达到分割级的训练和实时渲染
-
TenoRF:https://github.com/apchenstu/TensoRF
- 主要思想:场景稀疏,所以用张量分解方法分解体素(4维),分解低质的tensors,每个compoment可以看作一个vector-matrix
-
SDF:Signed Distance Field
- 解决Nerf几何不准的问题:计算空间点到最近表面的距离,在表面内SDF<0,表面外面SDF>0
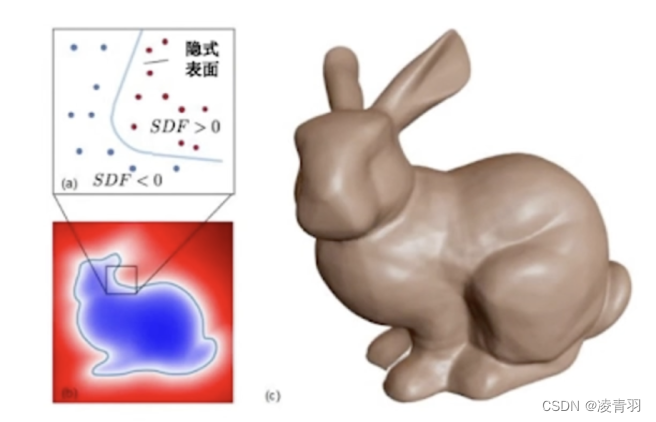
- 解决Nerf几何不准的问题:计算空间点到最近表面的距离,在表面内SDF<0,表面外面SDF>0
-
NeuS:https://arxiv.org/pdf/2106.10689.pdf
- 主要思想:Nerf和SDF不能天然结合起来
2. 主要内容
本文主要解决“基于静态场景的假设,不适用动态场景”的问题
2.1. 之前的工作
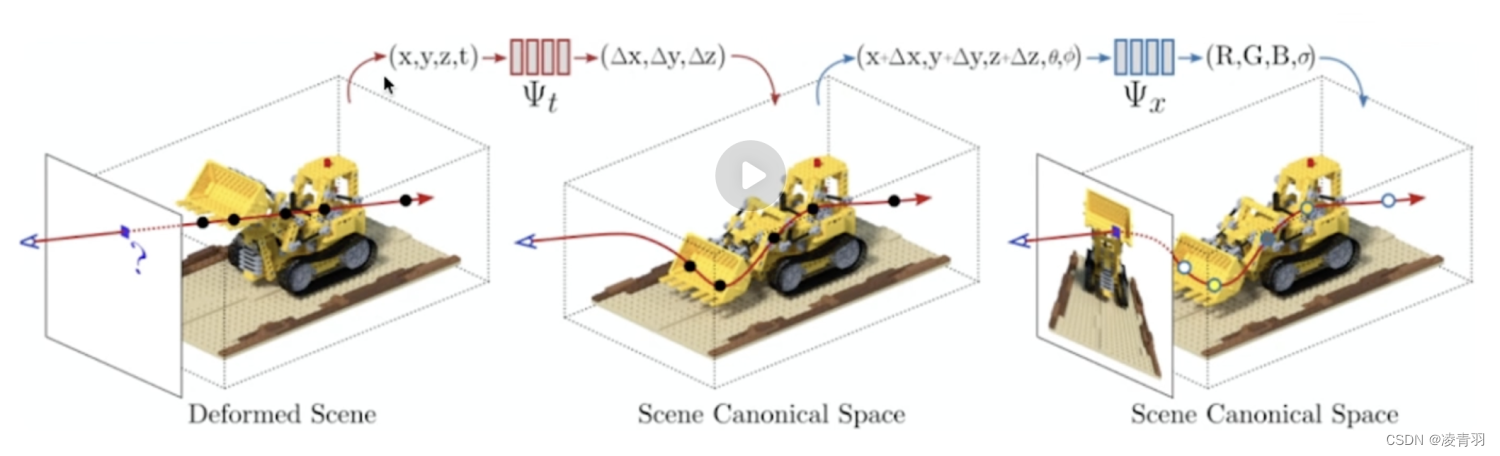
- Deformation-based NeRFs
- 主要思想:显示建模帧与帧之间点的位移变化
- 原始论文:
- 在人体比较复杂的场景,上图方法其实效果并不好
- Vid2Avatar:https://github.com/MoyGcc/vid2avatar(数字人领域)
- 在人体比较复杂的场景,上图方法其实效果并不好
- Modeling Implicit 4D Volume
- 主要思想:隐式建模4D空间(加上time的4维空间),通过将一个点投影到6个平面上完成
- Fridovich:https://openaccess.thecvf.com/content/CVPR2023/papers/Fridovich-Keil_K-Planes_Explicit_Radiance_Fields_in_Space_Time_and_Appearance_CVPR_2023_paper.pdf
- 主要思想:任意两个维度可以组成一个平面,这样就可以重建整个空间
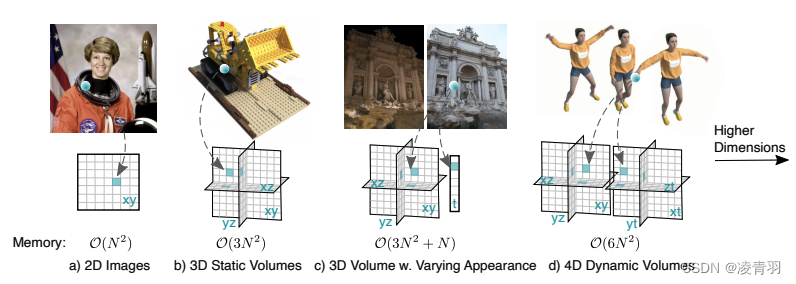
- 主要思想:任意两个维度可以组成一个平面,这样就可以重建整个空间
2.2. 本文内容:
- 之前工作在刚体运动的场景比较复杂了,因为通过刚体运动就可以建立
2.3. 其他内容
- 4D标注:
- object pose不准,会导致渲染的时候出现汽车跳动的问题
- 原因:现有的3D目标检测标注不准
- 1.单目标注的不具有尺度度量(真实世界尺度)
- 2.不用来做重建,不考虑帧间的一致性
- 原因:现有的3D目标检测标注不准
- 通过mask(车)做仿真
- object pose不准,会导致渲染的时候出现汽车跳动的问题
- 行人和车辆的交换:现在还没考虑分刚体的行人仿真
- 没有考虑shadow和weather的变化
- 物理仿真(物理方程)
- KITTI 10G显存就行了
- 在waymo数据上做的:标注框不是很准,但是直行还行,转弯不行
- nuscenes数据集:camera pose /object pose都不是很准,试验很多次效果不好
相关文章:
MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving
MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving(基于神经辐射场的自动驾驶仿真器)https://github.com/OPEN-AIR-SUN/marshttps://arxiv.org/pdf/2307.15058.pdfhttps://mp.weixin.qq.com/s/6Ion_DZGJwzs8JOoWMMbPw …...
:数据分析 | 数据挖掘 | 十大算法之一)
关联规则挖掘(上):数据分析 | 数据挖掘 | 十大算法之一
⭐️⭐️⭐️⭐️⭐️欢迎来到我的博客⭐️⭐️⭐️⭐️⭐️ 🐴作者:秋无之地 🐴简介:CSDN爬虫、后端、大数据领域创作者。目前从事python爬虫、后端和大数据等相关工作,主要擅长领域有:爬虫、后端、大数据开发、数据分析等。 🐴欢迎小伙伴们点赞👍🏻、收藏⭐️、…...

centos7 + citus12 + postgresql 14 安装
1 安装及编译 yum install -y centos-release-scl-rh epel-release yum update -y yum groupinstall -y Development Tools yum install -y https://download.postgresql.org/pub/repos/yum/reporpms/EL-7-x86_64/pgdg-redhat-repo-latest.noarch.rpm yum install -y postg…...

MySQL、Oracle、SQL Server / MS Access 中的 NULL函数用法
一、MySQL: isnull(exper) 判断exper是否为空,是则返回1,否则返回0 ifnull(exper1,exper2)判断exper1是否为空,是则用exper2代替 nullif(exper1,exper2)如果expr1 expr2 成立,那么返回值为NULL,否则返回值…...

App Store审核被拒原因与解决方案
为了避免不必要的上线延迟及成本增加,了解App Store审核被拒的常见原因以及对应的解决方案是开发人员以及营销人员的必修课。 CSDN相关的解决方案 App Store审核被拒的12个常见原因与快速过审解决方法...

LeetCode解法汇总121. 买卖股票的最佳时机
目录链接: 力扣编程题-解法汇总_分享记录-CSDN博客 GitHub同步刷题项目: https://github.com/September26/java-algorithms 原题链接:力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台 描述: 给定一个数…...
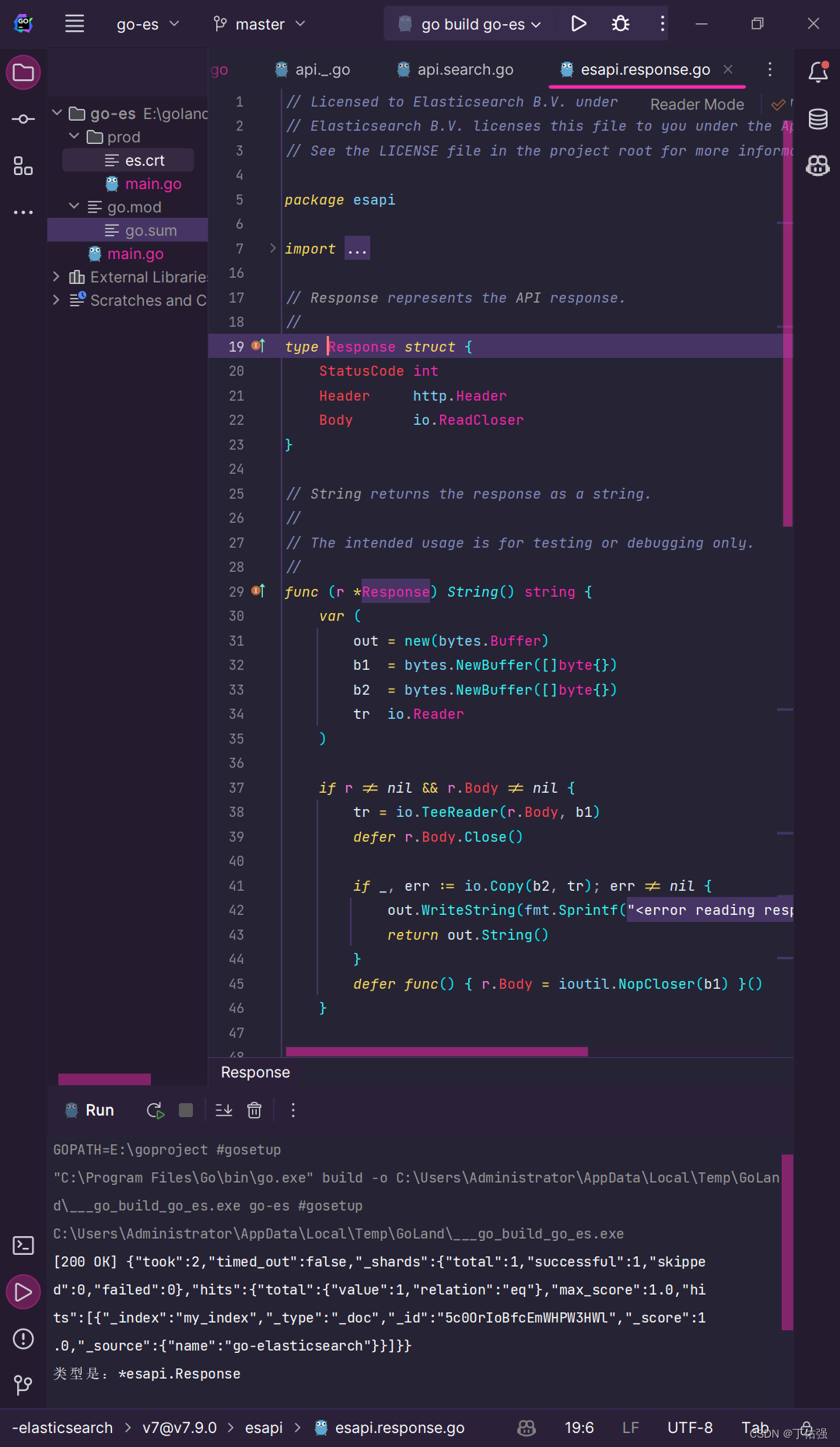
【Go】go-es统计接口被刷数和ip访问来源
go-es模块统计日志中接口被刷数和ip访问来源 以下是使用go的web框架gin作为后端,展示的统计页面 背景 上面的数据来自elk日志统计。因为elk通过kibana进行展示,但是kibana有一定学习成本且不太能满足定制化的需求,所以考虑用编程的方式…...

debian 安装 pg --chatGpt
pgt: 要在Debian上安装PostgreSQL (通常缩写为PG) 数据库,您可以使用apt包管理器来执行安装操作。以下是安装PostgreSQL的步骤: 1. 打开终端。 2. 使用sudo权限以管理员身份运行以下命令,以更新包信息并安装PostgreSQL: bash …...

商城小程序代客下单程序开发演示
一款专为传统电商、实体商家开发的商城系统小程序,做私域、做留存、做社交必备功能全都有。 1、丰富的营销玩法:拼团、秒杀、定金预售、分销、社区团购、积分商城、支付有礼等主流获客玩法都有。 2、强大的会员体系:普通会员、付费会员、会…...

SpringBoot 整合 jetcache缓存
目前 jetcache 支持的本地缓存方案有两种,远程缓存支持两种,分别如下: 本地缓存(Local) LinkedHashMapCaffeine 远程缓存(Remote) Redis Tair 依赖导入 <dependency><groupId>…...

HTML5+CSS3+移动web 前端开发入门笔记(二)HTML标签详解
HTML标签:排版标签 排版标签用于对网页内容进行布局和样式的调整。下面是对常见排版标签的详细介绍: <h1>: 定义一级标题,通常用于标题栏或页面主要内容的标题。<p>: 定义段落,用于将文字分段展示,段落之…...
Maven 配置阿里云镜像
1. 查找maven setting.xml配置文件 find / -name "setting.xml" 2. 添加阿里云镜像 修改maven根目录下的conf文件夹中的setting.xml文件中的mirrors下添加mirror标签 <settings> <localRepository>E:\Maven\repository</localRepository> <…...
矢量图绘制软件EazyDraw mac中文版软件介绍
EazyDraw mac是一款功能强大且易于使用的矢量绘图软件。 EazyDraw mac软件介绍 矢量绘图工具:EazyDraw 提供了一套全面的矢量绘图工具,包括直线、曲线、多边形、文本框、图形填充等。用户可以使用这些工具创建和编辑精确的矢量图形,无论是简…...

Cocos Creator3.8 项目实战(四)巧用九宫格图像拉伸
一、为什么要使用九宫格图像拉伸 相信做过前端的同学都知道,ui (图片)资源对包体大小和内存都有非常直接的影响。 通常ui 资源都是图片,也是最占资源量的资源类型,游戏中的ui 资源还是人机交互的最重要的部分ÿ…...

怎么使用jenkins设置web自动打包
在Jenkins中设置Web自动打包需要完成以下步骤: 1.环境基础 安装Jenkins:首先,你需要在服务器上安装Jenkins。 你可以从Jenkins官网下载Jenkins的安装包,并按照官方指导进行安装。 2.使用jenkins设置web自动打包步骤 创建Jenk…...
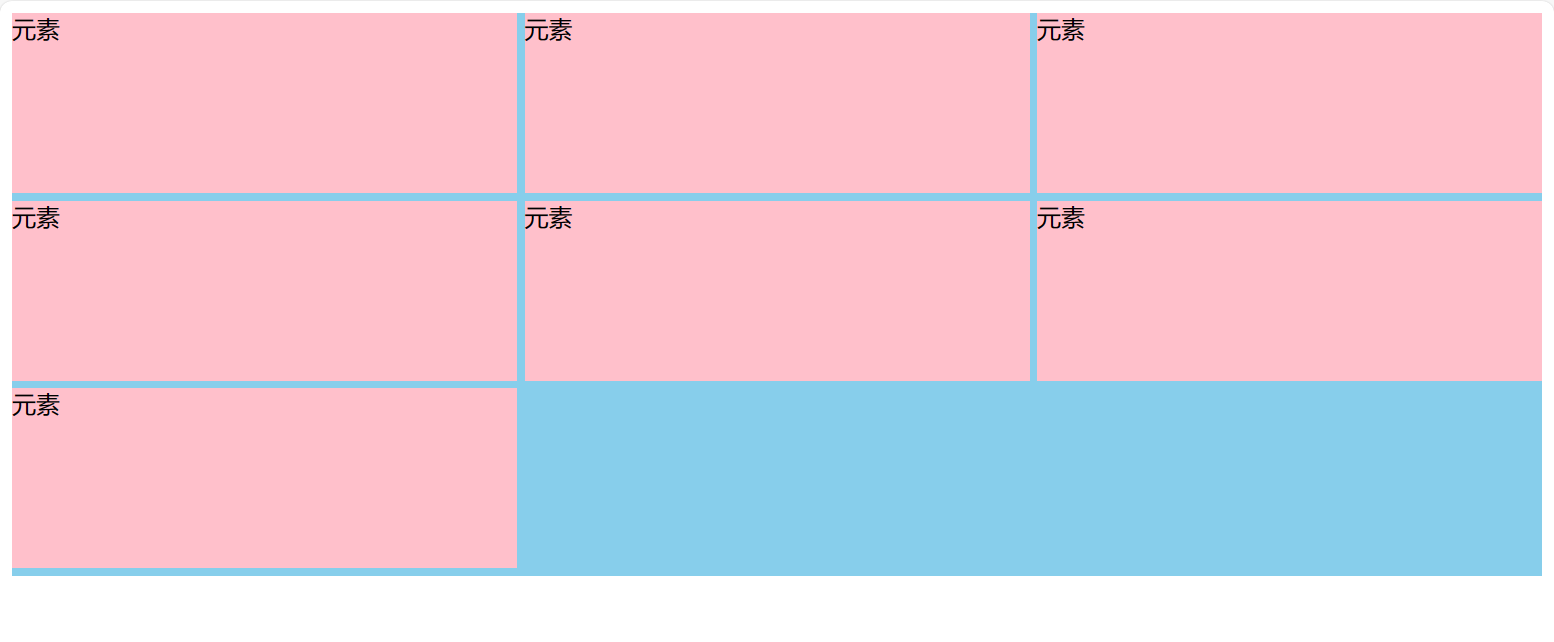
完美解决 flex 实现一行三个,显示多行,左对齐
效果图 代码 <body><section class"content"><div class"item">元素</div><div class"item">元素</div><div class"item">元素</div><div class"item">元素</di…...
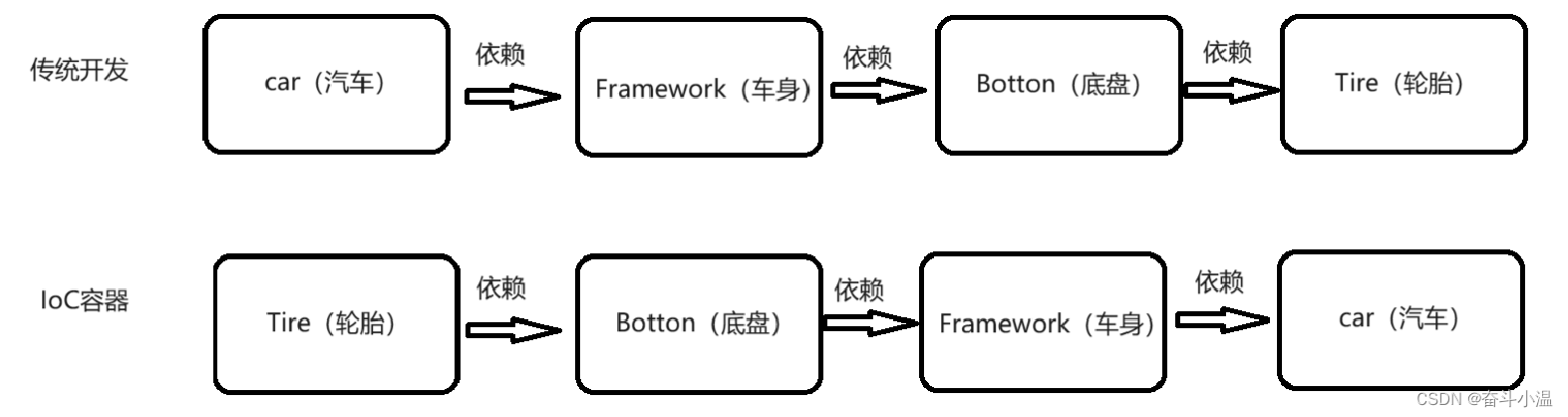
初识Spring
目录 1.Spring 基础 2.传统程序开发 3.IoC程序开发(解耦) 4.DI 4.1 IoC 和 DI 有什么区别 1.Spring 基础 Spring 指的是 Spring Framework(Spring 框架),它是⼀个开源框架,有着活跃⽽庞⼤的社区&…...

Mybatis 使用参数时$与#的区别
之前我们介绍了mybatis中参数的使用,本篇我们在此基础上介绍Mybatis中使用参数时$与#的区别。 如果您对mybatis中参数的使用不太了解,建议您先进行了解后再阅读本篇,可以参考: Mybatis参数(parameterType)https://blog.csdn.net…...

解锁Spring Boot的强大配置功能:@ConfigurationProperties与@PropertySources详解
解锁Spring Boot的强大配置功能:ConfigurationProperties与PropertySources详解 前言什么是ConfigurationProperties和PropertySourcesConfigurationProperties的使用步骤 1: 创建 Java POJO 类步骤 2: 配置类步骤 3: 配置文件步骤 4: 注入配置属性 PropertySources…...

NoSleep:告别Windows意外休眠的终极解决方案,让你的电脑始终保持清醒状态
NoSleep:告别Windows意外休眠的终极解决方案,让你的电脑始终保持清醒状态 【免费下载链接】NoSleep Lightweight Windows utility to prevent screen locking 项目地址: https://gitcode.com/gh_mirrors/nos/NoSleep 你是否经历过视频会议演示到一…...
)
攻防世界——echo-server(花指令)
查壳 elf Ubuntu系统写的,用kali运行会报错找到主函数,双击进入loc_80487C1不是很懂,看了大佬的说是花指令常见的花指令机器码 9A,E8,E9,EB 把垃圾数据用nop(0x90h)填充切换到汇编试图将loc_80487C1右键转换成未定义的数据对loc_80487C4进行c…...
)
你还在手动写Type Hints和Docstring?Gemini实时生成合规PEP 484/561注释(附GitHub Star超5k的私有化部署模板)
更多请点击: https://intelliparadigm.com 第一章:你还在手动写Type Hints和Docstring?Gemini实时生成合规PEP 484/561注释(附GitHub Star超5k的私有化部署模板) 现代Python工程已将类型安全与可维护性提升至核心地位…...

Poppins几何字体:免费开源的多语言设计神器
Poppins几何字体:免费开源的多语言设计神器 【免费下载链接】Poppins Poppins, a Devanagari Latin family for Google Fonts. 项目地址: https://gitcode.com/gh_mirrors/po/Poppins 你是否在寻找一款既专业又免费、同时支持多种语言的现代字体?…...

大模型时代:程序员小白如何抓住机遇,收藏这份高薪就业指南?
文章分析了2026年互联网技术就业市场的冰火两重天现象,AI相关岗位需求激增,传统岗位被替代。后端开发仍是中坚力量,前端市场饱和但高端人才稀缺,算法与AI工程师站在浪潮之巅,数据工程师因大模型需求水涨船高࿰…...
)
用Python和NumPy手把手教你仿真均匀线阵方向图(从公式到代码)
用Python和NumPy手把手教你仿真均匀线阵方向图(从公式到代码) 天线阵列的方向图分析是无线通信系统设计中的基础课题。对于刚接触阵列信号处理的工程师和学生来说,如何将教科书上的数学公式转化为可运行的代码,往往是一个令人头疼…...

基于多模态视觉模型和图文向量模型的工业图像知识库研究与应用
目录1 概述... 12 单一模型分析的局限性... 23 多模态视觉模型和图文向量模型的优势... 34 多模态视觉模型和图文向量模型应用场景... 45 多模态视觉模型和图文向量模型原理... 46 多模态视觉模型和图文向量模型应用... 86.1 图片知识库... 86.2 检索图片... 117.总结... 13…...
)
基于物联网节能及安防控制系统(有完整资料)
编号:CJ-32-2022-153设计简介:本设计是基于物联网节能及安防控制系统,主要实现以下功能:1、检测光强,室内外温度(两个温度传感器),人体红外检测是否有人; 2、室外温度过高…...

大语言模型角色扮演:从提示工程到智能体框架的完整指南
1. 项目概述:当大语言模型学会“扮演”角色如果你最近在关注大语言模型(LLM)的应用,可能会发现一个有趣的现象:单纯让模型回答“11等于几”或者写一封邮件,已经越来越难以满足我们的好奇心和实际需求了。一…...
CircuitPython硬件交互实战:从数字I/O到NeoPixel灯带控制
1. 项目概述如果你刚开始接触嵌入式硬件开发,面对一堆引脚、传感器和电机,可能会觉得有点无从下手。我刚开始玩Arduino和树莓派Pico的时候,也是这种感觉,总觉得底层寄存器、数据手册太复杂。直到后来用上了CircuitPythonÿ…...