open3d最大平面检测,平面分割
1.点云读入
- 读入文件(配套点云下载链接)
# 读取点云
pcd = o3d.io.read_point_cloud("point_cloud_00000.ply")
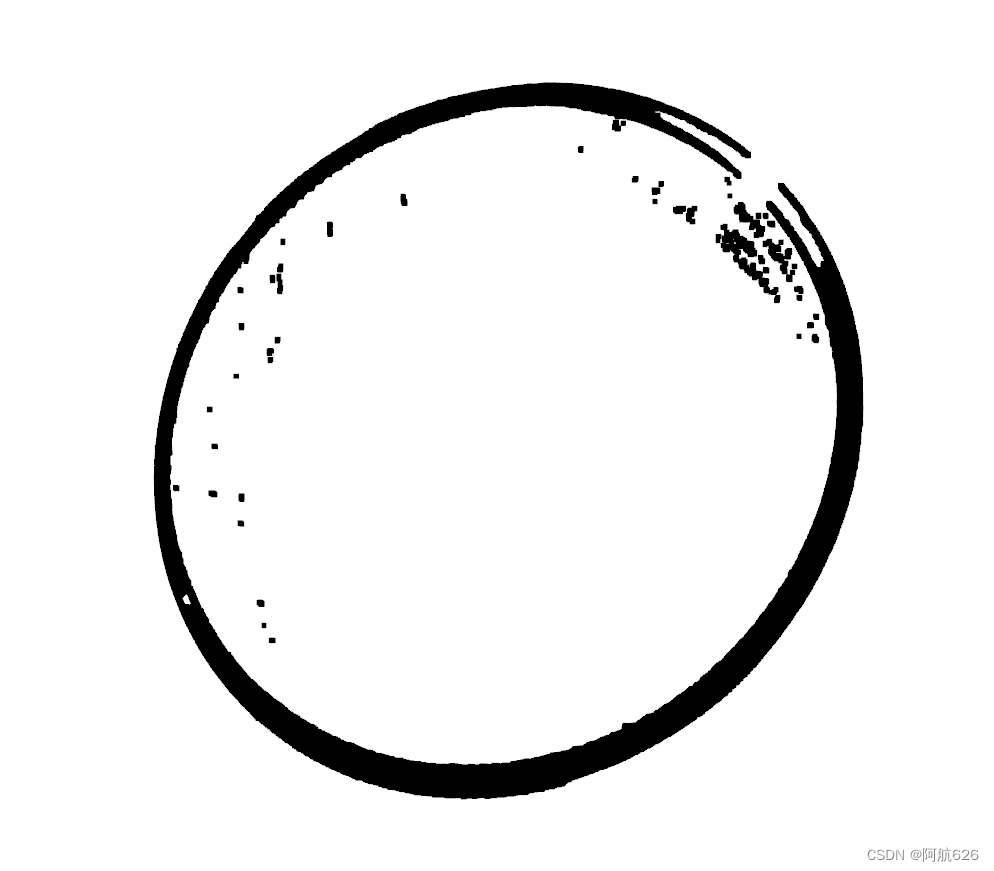
- 配套点云颜色为白色,open3d的点云显示默认背景为白色,所以将点云颜色更改为黑色
pcd.colors = o3d.utility.Vector3dVector(np.zeros(np.array(pcd.colors).shape))
- 显示点云
o3d.visualization.draw_geometries([pcd])
2.平面分割
- RANSAC方法寻找最大平面(RANSAC方法可以在干扰点存在的情况下拟合数据,需要给定拟合方程,通过在数据中随机选取指定个数的点来求解方程参数,然后看所有数据中有多少数据满足所求解得到的方程,如果数量超过设定阈值,就完成拟合)
- 注意,RANSAC方法随机选点,所以结果会具有一定的随机性,特别是干扰点较多的时候,两次运行可能会得到不一样的结果
plane_model, inliers = pcd.segment_plane(distance_threshold=1 * 1e-3,ransac_n=3,num_iterations=1000)
- 关键参数:
- distance_threshold:点到平面的最小距离,越小结果越精准
- ransac_n:求解平面方程所需的随机点个数
- num_iterations:随机平面被采样和验证的次数(随机选取点的次数,越大越可能得到正确结果,但会越慢)
- 返回参数:
- plane_model:平面标准方程参数(将平面返回为(a,b,c,d),使得对于平面上的每个点(x,y,z))
- inliers:内点(满足平面方程的点)的索引列表
[a, b, c, d] = plane_model
print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")
Plane equation: 0.00x + -0.01y + 1.00z + -0.44 = 0
3.内点提取与可视化显示
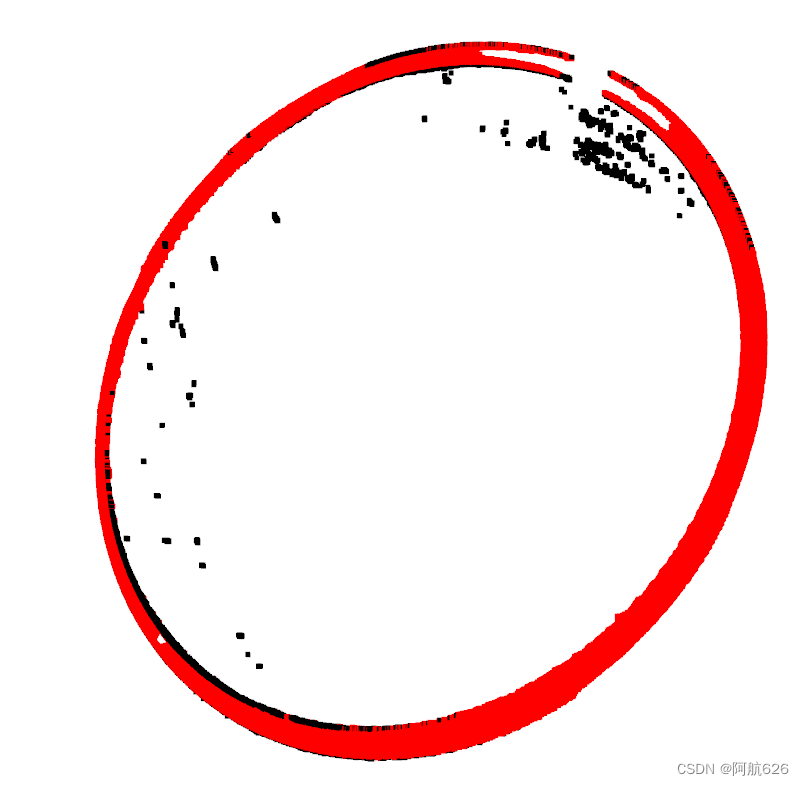
- 提取内点并涂色:
inlier_cloud = pcd.select_by_index(inliers)
inlier_cloud.paint_uniform_color([1.0, 0, 0])
- 保留外点:(通过内点索引取反)
outlier_cloud = pcd.select_by_index(inliers, invert=True)
- 内点外点同时可视化:
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])
4.整体代码
import open3d as o3d
import numpy as nppcd = o3d.io.read_point_cloud('duanmian/1/point_cloud_00000.ply')
points = np.array(pcd.points)
colors = np.zeros(np.array(pcd.points).shape[0])
pcd.colors = o3d.utility.Vector3dVector(np.zeros(np.array(pcd.colors).shape))
#o3d.visualization.draw_geometries([pcd])plane_model, inliers = pcd.segment_plane(distance_threshold=1 * 1e-3,ransac_n=3,num_iterations=1000)
[a, b, c, d] = plane_model
print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")inlier_cloud = pcd.select_by_index(inliers)
inlier_cloud.paint_uniform_color([1.0, 0, 0])
outlier_cloud = pcd.select_by_index(inliers, invert=True)
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])
相关文章:
open3d最大平面检测,平面分割
1.点云读入 读入文件(配套点云下载链接) # 读取点云 pcd o3d.io.read_point_cloud("point_cloud_00000.ply")配套点云颜色为白色,open3d的点云显示默认背景为白色,所以将点云颜色更改为黑色 pcd.colors o3d.utilit…...
)
【C++】4.类和对象(下)
1.再谈构造函数 1赋值 class Date { public:Date(int year, int month, int day){_year year;_month month;_day day;}private:int _year;int _month;int _day; };构造函数体中的语句只能将其称作为赋初值,而不能称作初始化。因为初始化只能初始化一次…...
自动驾驶仿真:ECU TEST 、VTD、VERISTAND连接配置
文章目录一、ECU TEST 连接配置简介二、TBC配置 test bench configuration三、TCF配置 test configuration提示:以下是本篇文章正文内容,下面案例可供参考 一、ECU TEST 连接配置简介 1、ECU TEST(简称ET),用于HIL仿…...

postgres数据库连接管理
1.连接命令psql -d postgres -h 10.0.0.51. -p 1921 -U postgres(-d指定数据库名字)2.pg防火墙介绍(pg实例层面的权限控制)pg_hba.conf文件配置文件分为5部分:配置示例#TYPE DATABASE USER ADDRESS METHODhost all loc…...

【华为OD机试模拟题】用 C++ 实现 - 环中最长子串(2023.Q1)
最近更新的博客 华为OD机试 - 入栈出栈(C++) | 附带编码思路 【2023】 华为OD机试 - 箱子之形摆放(C++) | 附带编码思路 【2023】 华为OD机试 - 简易内存池 2(C++) | 附带编码思路 【2023】 华为OD机试 - 第 N 个排列(C++) | 附带编码思路 【2023】 华为OD机试 - 考古…...

Spring:@Async 注解和AsyncResult与CompletableFuture使用
Async概述 Spring中用Async注解标记的方法,称为异步方法,它会在调用方的当前线程之外的独立的线程中执行, 其实就相当于我们自己new Thread(()-> System.out.println("hello world !"))这样在另一个线程中去执行相应的业务逻辑…...

tidb ptca,ptcp考证
PingCAP 认证 TiDB 数据库专员 V6 考试(2023-02-23)https://learn.pingcap.com/learner/exam-market/list?categoryPCTA PingCAP 认证 TiDB 数据库管理专家(PCTP - DBA)认证考试范围指引 - ☄️ 学习与认证 - TiDB 的问答社区:lo…...
关于用windows开发遇到的各种乌龙事件之node版本管理---nvm install node之后 npm 找不到的问题
友情提醒,开发最好用nvm控制node版本 nrm 控制镜像源,能少掉很多头发开发过程中技术迭代更新的时候最要老命的就是 历史项目的node版本没有记录,导致开启旧项目的时候就会报错。尤其是npm 升级到8.x.x以后,各种版本不兼容。 真…...
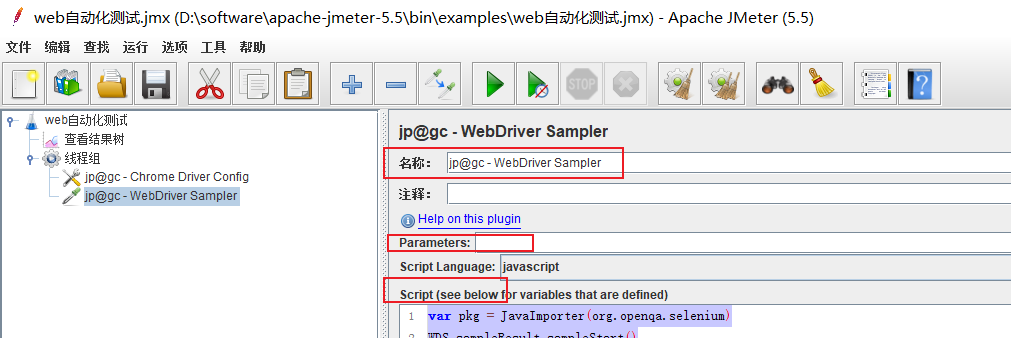
JMeter做UI自动化
插件安装搜插件selenium,安装添加config添加线程组右键线程组->添加->配置元件->jpgc - Chrome Driver Configoption和proxy不解释了添加Sampler右键线程组->添加->取样器->jpgc - WebDriver Samplerscript language 选择:JavaScript&…...
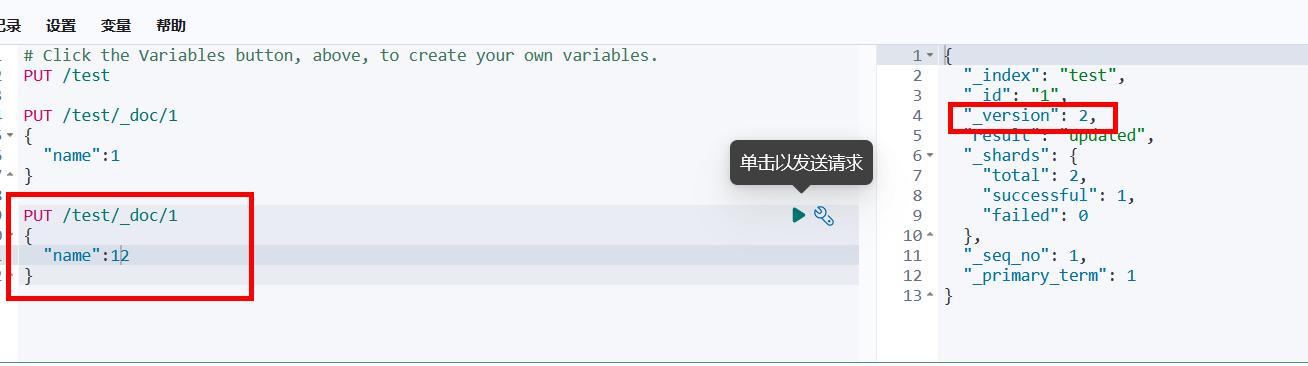
Kibana与Elasticsearch
下载与安装Kibanahttps://www.elastic.co/cn/downloads/kibanaKibana的版本与Elasticsearch的版本是一致的,使用方法也和Elasticsearch一致。由于我的英文不是特别好,我们找到config/kibana.yml末尾添加i18n.locale: "zh-CN" ,汉化…...
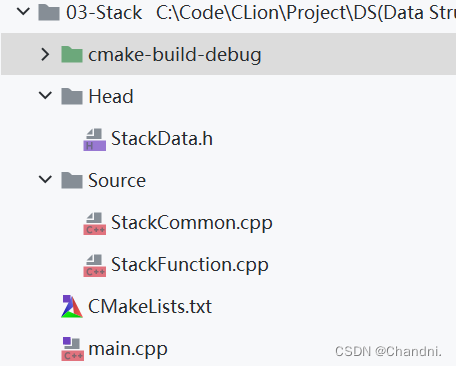
[数据结构]:03-栈(C语言实现)
目录 前言 已完成内容 单链表实现 01-开发环境 02-文件布局 03-代码 01-主函数 02-头文件 03-StackCommon.cpp 04-StackFunction.cpp 结语 前言 此专栏包含408考研数据结构全部内容,除其中使用到C引用外,全为C语言代码。使用C引用主要是为了简…...
1W+企业都在用的数字化管理秘籍,快收藏!
企业数字化,绕不开的话题。 随着国家相继出台各种举措助力中小企业数字化转型,积极推动产业数字化转型,培育数字经济新生态,企业想要谋生存,求发展,必然需要做好数字化转型和管理。 本篇文章想跟大家一起…...
多模态机器学习入门——文献阅读(一)Multimodal Machine Learning: A Survey and Taxonomy
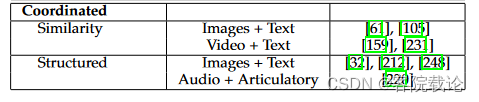
文章目录说明论文阅读AbstractIntroductionIntroduction总结Applications:A Historical Perspective补充与总结3 MULTIMODAL REPRESENTATIONS总结Joint Repersentations(1)总结和附加(一)Joint Repersentations(2)总结…...
)
通过哲学家进餐问题学习线程间协作(代码实现以leetcode1226为例)
哲学家进餐问题(代码实现以leetcode1226为例)问题场景解决思路解决死锁问题代码实现cgo(代码实现以leetcode1226为例) 提到多线程和锁解决问题,就想到了os中哲学家进餐问题。 问题场景 回想该问题产生场景,五个哲学家共用一张圆桌,分别坐在…...

消息队列--Kafka
Kafka简介集群部署配置Kafka测试Kafka1.Kafka简介 数据缓冲队列。同时提高了可扩展性。具有峰值处理能力,使用消息队列能够使关键组件顶住突发的访问压力,而不会因为突发的超负荷的请求而完全崩溃。 Kafka是一个分布式、支持分区的(partition…...

外盘国际期货:我国当代年轻人结婚逐年下降
我国当代年轻人 结婚现状结婚少了 结婚晚了 2013年后结婚人数逐年下降 结婚少了 离婚多了 结婚年龄越来越迟 以30岁为界线,30岁之后结婚占比逐年增加 2018 20-24岁:435.6万人 25-29岁:736.2万人 30-34岁:314.7万人 35-3…...

Ubuntu 22.04.2 发布,可更新至 Linux Kernel 5.19
Ubuntu 22.04 LTS (Jammy Jellyfish) Ubuntu 22.04.2 发布,可更新至 Linux Kernel 5.19 请访问原文链接:Ubuntu 22.04 LTS (Jammy Jellyfish),查看最新版。原创作品,转载请保留出处。 作者主页:www.sysin.org 发行说…...

论文阅读笔记——《室内服务机器人的实时场景分割算法》
一、主要工作 通过深度可分离卷积、膨胀卷积和通道注意力机制设计轻量级的高准确度特征提取模块。融合浅层特征与深层语义特征获得更丰富的图像特征。在NYUDv2和CamVid数据集上的MIoU分别达到72.7%和59.9%,模型的计算力为4.2GFLOPs,参数量为8.3Mb。 二…...

Hive学习——自定义函数UDFUDTF
目录 一、添加依赖 二、编写自定义UDF函数 (一)自定义首字母大写函数 1.java代码 2.hive中运行 (二)自定义字符串全部小写的函数 1.java代码 2.hive运行 (三)创建解析JSON字符串的函数 1.java代码 三、自定义编写UDTF函数 1.java编写 2.hive运行 虽然Hive中内置了…...
自学前端,你必须要掌握的3种定时任务
当你看到这篇博客的时候,一定会和狗哥结下不解之缘,因为狗哥的博客里不仅仅有代码,还有很多代码之外的东西,如果你可以看到最底部,看到投票环节,我相信你一定感觉到了,狗哥的真诚,狗…...

MAA明日方舟助手:一键解放双手的智能游戏伴侣终极指南
MAA明日方舟助手:一键解放双手的智能游戏伴侣终极指南 【免费下载链接】MaaAssistantArknights 《明日方舟》小助手,全日常一键长草!| A one-click tool for the daily tasks of Arknights, supporting all clients. 项目地址: https://git…...
)
告别窗口混乱!用RDCMan 2.93一站式管理你的所有Windows服务器(附保姆级配置流程)
告别窗口混乱!用RDCMan 2.93一站式管理你的所有Windows服务器(附保姆级配置流程)当你的工作环境中需要同时管理十几台甚至几十台Windows服务器时,传统的远程桌面连接方式很快就会变成一场噩梦。每个连接都占用一个独立窗口&#x…...

模型不确定性下的公平性评估:自一致性指标与集成弃权策略
1. 项目概述:当公平性评估遭遇模型不确定性在机器学习,尤其是公平性评估这个领域,我们常常会陷入一种“确定性幻觉”。我们训练一个模型,在某个测试集上计算其误判率、假阳性率、假阴性率,然后得出一个结论:…...

Mermaid Live Editor:为什么每个开发者都需要这个实时图表编辑神器?
Mermaid Live Editor:为什么每个开发者都需要这个实时图表编辑神器? 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trendin…...

5分钟掌握微信防撤回:WeChatIntercept新手完整指南
5分钟掌握微信防撤回:WeChatIntercept新手完整指南 【免费下载链接】WeChatIntercept 微信防撤回插件,一键安装,仅MAC可用,支持v3.7.0微信 项目地址: https://gitcode.com/gh_mirrors/we/WeChatIntercept 还在为错过微信撤…...

Atmosphère系统架构深度解析:分层安全模型与模块化设计哲学
Atmosphre系统架构深度解析:分层安全模型与模块化设计哲学 【免费下载链接】Atmosphere-stable 大气层整合包系统稳定版 项目地址: https://gitcode.com/gh_mirrors/at/Atmosphere-stable Atmosphre作为Nintendo Switch的自定义固件,其核心价值在…...

MySQL报错注入实战:从错误信息读取到文件写入
1. 这不是“SQL注入教程”,而是一次真实渗透测试中的边界突破实践很多人看到“基于报错的SQL注入”第一反应是:老掉牙的技术,现在还有用?我去年在给一家本地政务系统做授权渗透时,就遇到了一个看似完全无感的登录接口—…...

【芯片测试】:6. 向量、Sequencer 指令与高速串行 IO
Pattern 详解:向量、Sequencer 指令与高速串行 IO系列: Advantest V93000 SmarTest 8 核心概念解析|第 6 篇(共 8 篇) 适合读者: 需要理解数字测试激励数据结构的工程师前言 Pattern(模式&#…...

基于FeFET的动态可重构FPGA:实现亚纳秒级上下文切换的硬件加速新架构
1. 项目概述与核心挑战如果你在硬件加速领域摸爬滚打过几年,大概率会对FPGA又爱又恨。爱的是它无与伦比的灵活性,恨的是它在“灵活”和“高效”之间那道难以逾越的鸿沟。传统基于SRAM的FPGA,其可重构性是通过烧写配置位流到SRAM单元来实现的。…...
)
全球仅17家机构掌握的PlayAI教育大模型微调技术(含3所双一流高校内部调参手册节选)
更多请点击: https://intelliparadigm.com 第一章:PlayAI教育大模型微调技术的全球稀缺性与战略价值 在全球人工智能教育应用加速落地的背景下,PlayAI教育大模型微调技术已成为少数国家与头部机构掌握的核心能力。其稀缺性不仅源于算力、数据…...