【每日一题Day343】LC2731移动机器人 | 脑筋急转弯+数学
移动机器人【LC2731】
有一些机器人分布在一条无限长的数轴上,他们初始坐标用一个下标从 0 开始的整数数组
nums表示。当你给机器人下达命令时,它们以每秒钟一单位的速度开始移动。给你一个字符串
s,每个字符按顺序分别表示每个机器人移动的方向。'L'表示机器人往左或者数轴的负方向移动,'R'表示机器人往右或者数轴的正方向移动。当两个机器人相撞时,它们开始沿着原本相反的方向移动。
请你返回指令重复执行
d秒后,所有机器人之间两两距离之和。由于答案可能很大,请你将答案对109 + 7取余后返回。注意:
- 对于坐标在
i和j的两个机器人,(i,j)和(j,i)视为相同的坐标对。也就是说,机器人视为无差别的。- 当机器人相撞时,它们 立即改变 它们的前进方向,这个过程不消耗任何时间。
- 当两个机器人在同一时刻占据相同的位置时,就会相撞。
- 例如,如果一个机器人位于位置 0 并往右移动,另一个机器人位于位置 2 并往左移动,下一秒,它们都将占据位置 1,并改变方向。再下一秒钟后,第一个机器人位于位置 0 并往左移动,而另一个机器人位于位置 2 并往右移动。
- 例如,如果一个机器人位于位置 0 并往右移动,另一个机器人位于位置 1 并往左移动,下一秒,第一个机器人位于位置 0 并往左行驶,而另一个机器人位于位置 1 并往右移动。
-
思路
-
两个相同位置的机器人发生碰撞后,同时改变方向,相当于没有变化发生,可以近似为穿透,即每个机器人按照初始方向前进d个距离
-
将机器人的最终位置进行排序后,计算所有机器人之间两两距离之和
( n u m s [ i ] − n u m s [ i − 1 ] ) + . . . + ( n u m s [ i ] − n u m s [ 0 ] ) = i ∗ n u m s [ i ] − ( n u m s [ 0 ] + . . . + n u m s [ i − 1 ] ) (nums[i]-nums[i-1]) + ... + (nums[i]-nums[0]) = i * nums[i] - (nums[0] + ... +nums[i-1]) (nums[i]−nums[i−1])+...+(nums[i]−nums[0])=i∗nums[i]−(nums[0]+...+nums[i−1])
上述公式为第i个机器人与其左侧机器人的距离和,即 i ∗ n u m s [ i ] − 前缀和 i * nums[i] - 前缀和 i∗nums[i]−前缀和。从第0个机器人依次计算与其左侧机器人的距离和。
-
-
实现
class Solution {public static final int MOD = (int)(1e9 + 7);public int sumDistance(int[] nums, String s, int d) {// 两个相同位置的机器人发生碰撞后,同时改变方向,相当于没有变化发生,可以近似为穿透,即每个机器人按照初始方向前进d个距离// 将机器人的最终位置进行排序后,计算所有机器人之间两两距离之和// (nums[i]-nums[i-1]) + ... + (nums[i]-nums[0]) = i * nums[i] - (nums[0] + ... +nums[i-1])// 上述公式为第i个机器人与其左侧机器人的距离和,即 i * nums[i] - 前缀和。从第0个机器人依次计算与其左侧机器人的距离和。int n = nums.length;long[] arr = new long[n];for (int i = 0; i < n; i++){arr[i] = (long)(nums[i] + (s.charAt(i) == 'R' ? d : -d));}Arrays.sort(arr);long res = 0L, sum = 0L;for (int i = 0; i < n; i++){res = (res + i * arr[i] - sum) % MOD;sum += arr[i];}return (int)res;} }- 复杂度
- 时间复杂度: O ( n log n ) \mathcal{O}(n \log n ) O(nlogn)
- 空间复杂度: O ( n ) \mathcal{O}(n) O(n)
- 复杂度
相关文章:

【每日一题Day343】LC2731移动机器人 | 脑筋急转弯+数学
移动机器人【LC2731】 有一些机器人分布在一条无限长的数轴上,他们初始坐标用一个下标从 0 开始的整数数组 nums 表示。当你给机器人下达命令时,它们以每秒钟一单位的速度开始移动。 给你一个字符串 s ,每个字符按顺序分别表示每个机器人移动…...

疯狂java 1.7垃圾回收机制
内存泄漏:如果一些分配出去的内存得不到及时回收,就会引起系统运行速度下降,甚至导致程序瘫痪 Java程序的内存分配和回收都是由JRE在后台自动进行的。JRE会负责回收哪些不再使用的内存,这种机制被称为垃圾回收(Garbag…...

day01_基础
零、今日内容 1 jdk 2 idea使用 3 HelloWorld程序 4 变量 5 数据类型 6 String 一、JDK安装 JDK java开发工具包,敲代码的环境 1.1 卸载 控制面板 -> 卸载程序 -> 选择jdk,右键卸载 1.2 安装 注意: 现在安装的是JDK8版本,虽然最新的版本是21版本,但是工作市场中最流行的…...
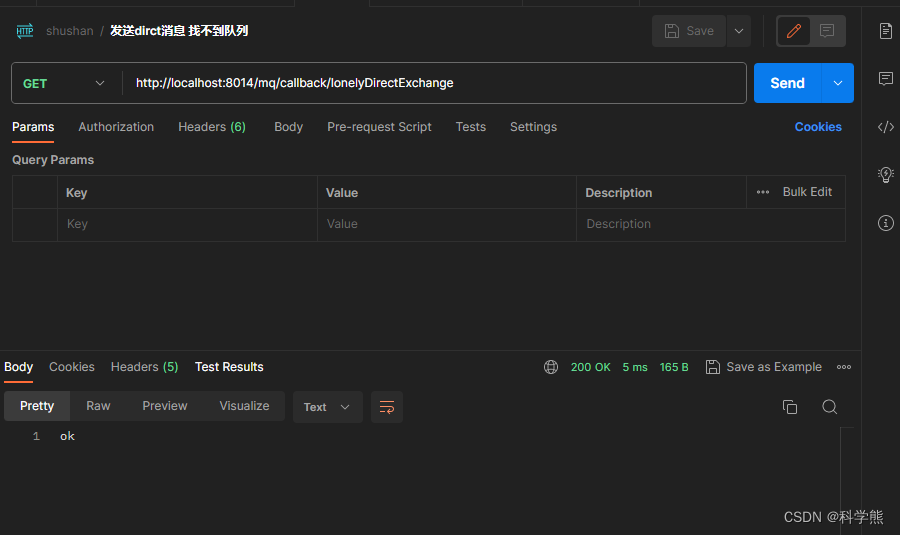
RabbitMQ开启消息发送确认和消费手动确认
开启RabbitMQ的生产者发送消息到RabbitMQ服务端的接收确认(ACK)和消费者通过手动确认或者丢弃消费的消息。 通过配置 publisher-confirm-type: correlated 和publisher-returns: true开启生产者确认消息。 server:port: 8014spring:rabbitmq:username: …...

嵌入式系统开发【深入浅出】 GPIO 类设备的驱动程序
目录 GPIO管脚的输出功能相当于控制、输入相当于检测 使用GPIO基本流程 对于某一个管脚来说最多有几种功能? 拓展 【定时器与系统定时器】 决定定时长短的因素: 普通定时器 系统定时器 STM32F103RBT6的时钟源有哪五种 sysclk 的时钟频率由哪个时钟源提供基…...

项目管理必备的22个公式
大家好,我是老原。 趁着国庆时间比较空闲,给你们整理了一些项目管理必备的计算公式,一共22个。 每一个公式都给你们标注了适用情况和使用方法,为了方便你们理解,也加了一些例子,保准你看了就会。 觉得不…...

ccache加速编译速度
ccache https://gitee.com/lixiaoxmm/ccache.git 依赖hiredis、zstd(zstd的cmakelists.txt在build/cmake目录下) 下载mingw,https://www.mingw-w64.org/downloads/#w64devkit hiredis、zstd使用mingw编译 cmake -G “MinGW Makefiles” cmakecache.txt手动修改去掉网络下载,…...
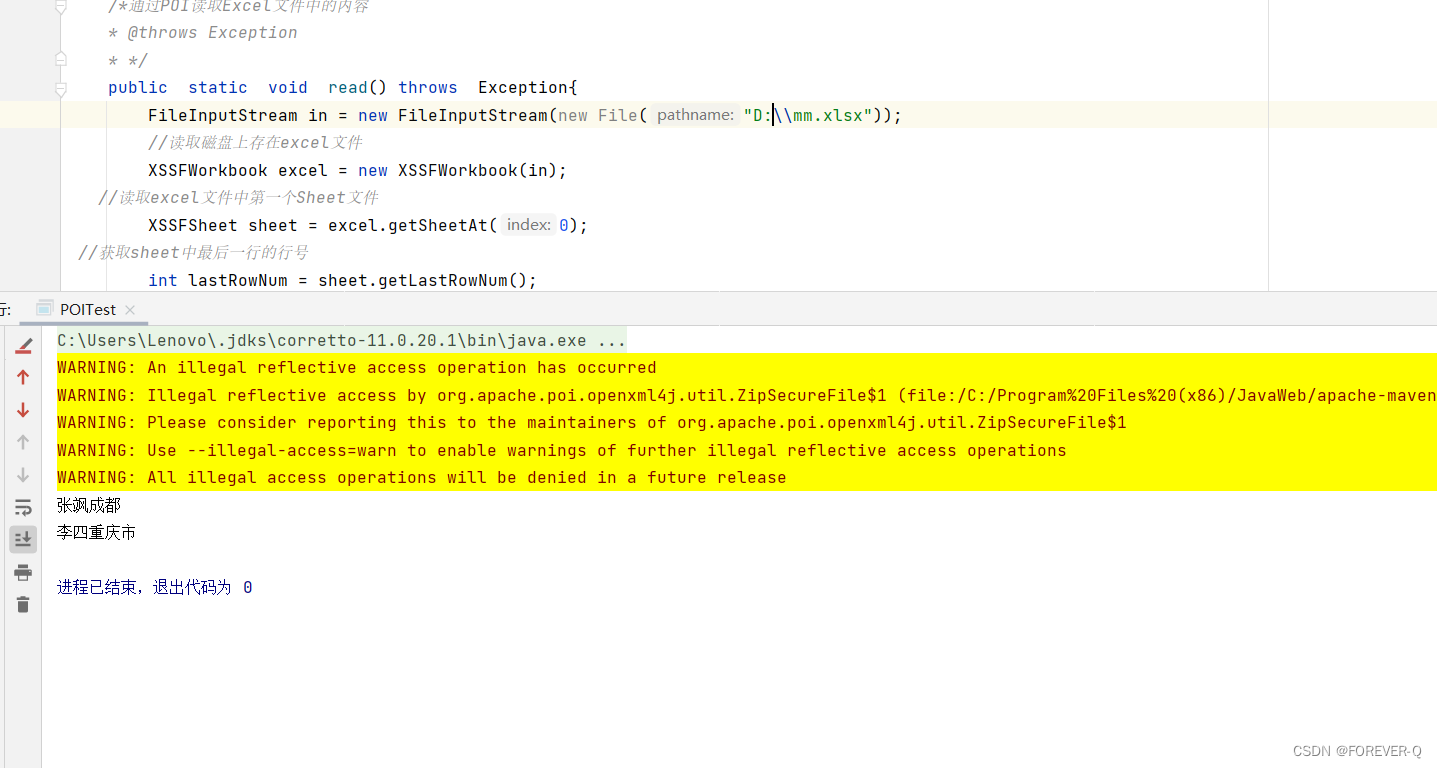
Apache POI使用
1.导入坐标 <!-- poi --><dependency><groupId>org.apache.poi</groupId><artifactId>poi</artifactId><version>${poi}</version></dependency><dependency><groupId>org.apache.poi</groupId><a…...
)
UNIQUE VISION Programming Contest 2023 Autumn(AtCoder Beginner Contest 323)
A - Weak Beats 链接 : A - Weak Beats 思路 : 模拟即可,如果在偶数位上出现了非0得元素,直接输出"No"后返回即可,循环顺利结束的话,就直接输出"Yes"; 代码 : #include<bits/stdc.h> #define IOS ios::sy…...

Docker 网络管理
Docker 网络实现原理 Docker使用Linux桥接,在宿主机虚拟一个Docker容器网桥(docker0),Docker启动一个容器时会根据Docker网桥的网段分配给容器一个IP地址,称为Container-IP,同时Docker网桥是每个容器的默认网关。因为在同一宿主机…...

网络安全国家队-安防思考与实践
按照工信部“三同步”安全建设的统一要求,本项目的实施应具备符合等级保护要求的安全防护措施(主要为传输控制、防火墙隔离、入侵检测、安全审计等网络安全措施;操作系统安全、数据库安全、防病毒管理、安全审计等基础系统安全措施࿰…...
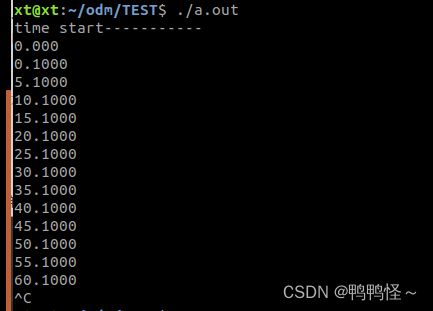
epoll 定时器
参考: Linux下使用epoll监听定时器-CSDN博客 但是这个用的是gettimeofday。 本人使用的是 #include <stdlib.h> #include<stdio.h> #include <sys/timerfd.h> #include <sys/epoll.h> #include <unistd.h> #include <sys/time.…...

BUUCTF Java逆向解密 1
Class文件是Java编译后的二进制字节码文件。 我这里使用的是jadx-gui,直接将class文件拖进去即可 package defpackage;import java.util.ArrayList; import java.util.Scanner;/* renamed from: Reverse reason: default package */ /* loaded from: Reverse.clas…...
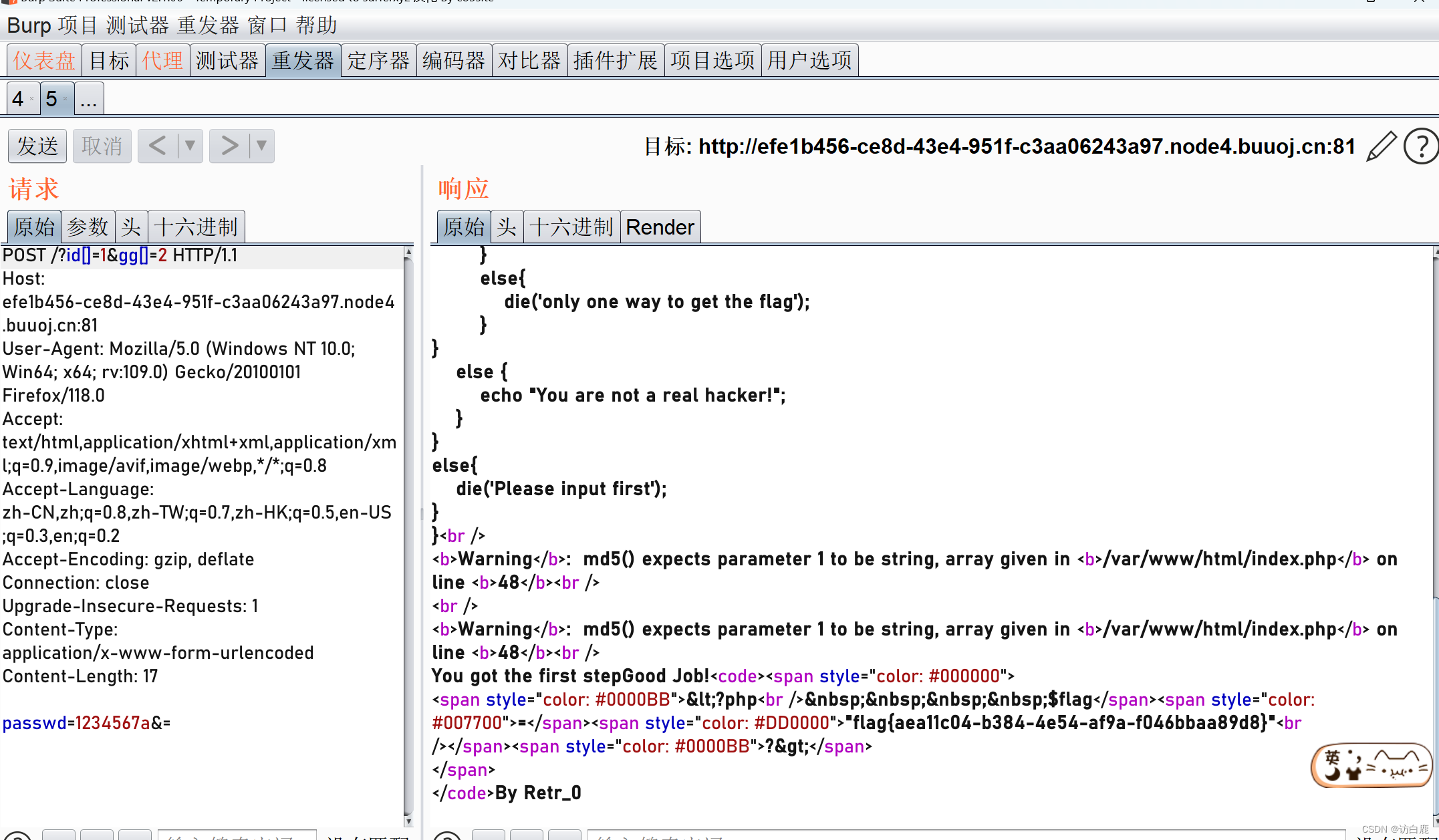
BUUCTF [MRCTF2020]Ez_bypass1
这道题全程我都是用bp做的 拿到题目 我们查看页面源代码得到 代码审计 我们要用get传入id和gg两个参数,id和gg的值要求不能相等,但是id和gg的md5强比较必须相等 if(isset($_GET[gg])&&isset($_GET[id])) {$id$_GET[id];$gg$_GET[gg];if (md5($…...
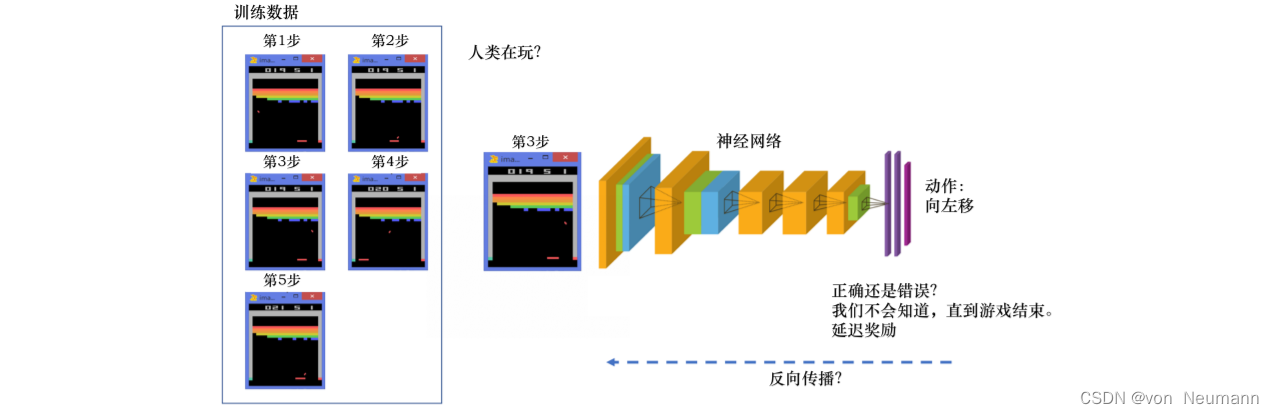
深入理解强化学习——强化学习和有监督学习
分类目录:《深入理解强化学习》总目录 通过前文的介绍,我们现在应该已经对强化学习的基本数学概念有了一定的了解。这里我们回过头来再看看一般的有监督学习和强化学习的区别。以图片分类为例,有监督学习(Supervised Learning&…...

设计模式 - 结构型模式考点篇:装饰者模式(概念 | 案例实现 | 优缺点 | 使用场景)
目录 一、结构型模式 1.1、装饰者模式 1.1.1、概念 1.1.2、案例实现 1.1.3、优缺点 1.1.4、使用场景 一、结构型模式 1.1、装饰者模式 1.1.1、概念 装饰者模式就是指在不改变现有对象结构的情况下,动态的给该对象增加一些职责(增加额外功能&#…...

计算机竞赛 题目:基于深度学习的手势识别实现
文章目录 1 前言2 项目背景3 任务描述4 环境搭配5 项目实现5.1 准备数据5.2 构建网络5.3 开始训练5.4 模型评估 6 识别效果7 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 基于深度学习的手势识别实现 该项目较为新颖,适合作为竞赛课题…...

手撕各种排序
> 作者简介:დ旧言~,目前大一,现在学习Java,c,c,Python等 > 座右铭:松树千年终是朽,槿花一日自为荣。 > 目标:掌握每种排序的方法,理解每种排序利弊…...
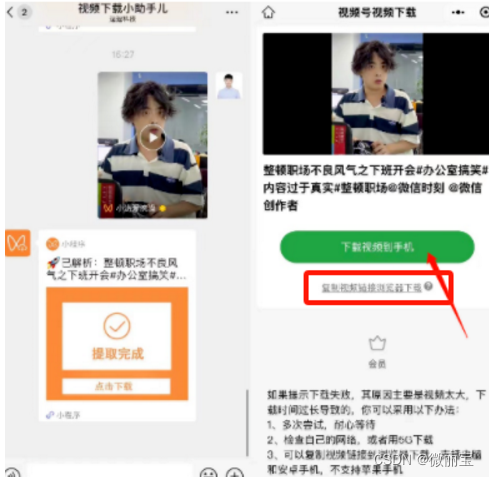
视频号的链接在哪,视频号视频链接地址获取办法!
不少人问视频号的链接在哪里可以获取,本质的在腾讯微信中目前视频号的链接是无法获取的,但好事多磨今天就分享一个第三方的视频号视频链接地址获取办法,希望对你有所帮助! 1:在微信客户端中,我们可以通过搜…...

深度学习笔记之优化算法(六)RMSprop算法的简单认识
深度学习笔记之优化算法——RMSProp算法的简单认识 引言回顾:AdaGrad算法AdaGrad算法与动量法的优化方式区别AdaGrad算法的缺陷 RMProp算法关于AdaGrad问题的优化方式RMSProp的算法过程描述 RMSProp示例代码 引言 上一节对 AdaGrad \text{AdaGrad} AdaGrad算法进行…...

Windows系统信息里藏了多少宝?教你用systeminfo和wmic命令挖出BIOS等硬件详情
Windows命令行高手课:用systeminfo和wmic打造硬件信息查询工具箱 每次打开第三方硬件检测工具时,那些闪烁的广告弹窗是否让你不胜其烦?其实Windows早已内置了一套堪比专业软件的硬件信息查询系统。本文将带你解锁systeminfo和wmic这对黄金组合…...

嵌入式Linux CAN通信实战:从原理到SocketCAN编程与调试
1. 项目概述:在国产工业板上玩转CAN-BUS最近在做一个工业数据采集的项目,需要把几台分散的设备数据汇总到一个主控单元。现场布线复杂,干扰又大,RS485虽然经典,但主从轮询的机制在实时性上总觉得差点意思,而…...

2025届最火的AI辅助论文方案横评
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 深寻作为先进的大型语言模型,在学术论文写作领域显现出明显的应用潜力ÿ…...

怎样快速删除背景?2026年免费工具实测对比,找到最简单的抠图方法
图片背景删除已经成为日常工作中的常见需求——无论是制作证件照、电商商品图,还是社交媒体头像,都离不开一个靠谱的背景去除工具。但市面上的工具五花八门,从专业软件到在线应用,从手机App到小程序,到底哪个才是最简单…...

基于RAG与智能体技术构建法律领域AI应用实战指南
1. 项目概述:一个法律智能体的诞生最近在GitHub上看到一个挺有意思的项目,叫mileson/moticlaw。光看这个名字,可能有点摸不着头脑,但稍微拆解一下就能明白它的野心:“motic” 很可能是 “motion”(动议、提…...
)
生物信息学新手必看:用K-means和WGCNA分析转录组数据的保姆级流程(附R代码)
生物信息学实战:从K-means到WGCNA的转录组分析全流程指南 第一次接触转录组数据分析时,我盯着满屏的基因表达矩阵完全无从下手。那些论文里看似流畅的分析流程,在实际操作时却处处是坑——数据格式报错、参数设置不合理、结果解读模糊...这正…...

在Windows电脑上畅享酷安社区的完整指南:桌面端酷安客户端终极教程
在Windows电脑上畅享酷安社区的完整指南:桌面端酷安客户端终极教程 【免费下载链接】Coolapk-UWP 一个基于 UWP 平台的第三方酷安客户端 项目地址: https://gitcode.com/gh_mirrors/co/Coolapk-UWP 想要在大屏幕上舒适地浏览酷安社区吗?厌倦了手机…...
Transformer架构与混合专家系统(MoE)的技术演进与应用
1. Transformer架构与混合专家系统(MoE)的演进之路2017年,Transformer架构的横空出世彻底改变了自然语言处理的游戏规则。这种基于自注意力机制的架构不仅在各种序列建模任务中展现出惊人性能,更为后续的大规模语言模型奠定了坚实基础。然而,…...
)
别再复制官网代码了!Vue + Ant Design 图标与分隔符的本地化实战(附避坑指南)
Vue Ant Design 图标与分隔符的本地化实战指南 在Vue项目中使用Ant Design Vue组件库时,很多开发者习惯直接从官网复制示例代码。然而,这种"拿来主义"常常导致项目运行时出现图标不显示、样式依赖CDN资源等问题。本文将带你从零开始ÿ…...

Cube Studio:革命性云原生AI平台,一站式解决机器学习全流程难题
Cube Studio:革命性云原生AI平台,一站式解决机器学习全流程难题 【免费下载链接】cube-studio cube studio开源云原生一站式机器学习/深度学习/大模型AI平台/MaaS/mlops/人工智能平台/训推平台,算法全链路流程,多租户,…...