c++视觉处理---霍夫变换
霍夫直线变换的函数
HoughLines 是OpenCV库中用于执行霍夫直线变换的函数。霍夫直线变换用于检测图像中的直线。下面是该函数的基本用法:
cv::HoughLines(image, lines, rho, theta, threshold);
image: 输入的二值图像,通常是通过边缘检测算法生成的。lines: 存储检测到的直线的容器。rho: 霍夫空间中的距离分辨率。通常设置为像素。theta: 霍夫空间中的角度分辨率。通常设置为弧度。threshold: 用于判断直线是否检测成功的阈值。只有当投票数大于等于此阈值时,才会被认为检测到一条直线。
cv::HoughLines 函数将在输入图像上执行霍夫直线变换,识别直线,并将检测到的直线的参数 (ρ, θ) 存储在 lines 容器中。每个检测到的直线都由 (ρ, θ) 表示,其中 ρ 是距离原点的距离,θ 是直线的角度。您可以在 lines 容器中访问这些参数。
以下是一个使用 cv::HoughLines 的简单示例:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>using namespace std;
using namespace cv;
#include <fstream>
using namespace cv; //包含cv命名空间
#include <opencv2/core/core.hpp>//----------------- 【main()函数】--------------------------
// 描述: 控制台应用程序的入口函数, 我们的程序从这里开始
//
int main()
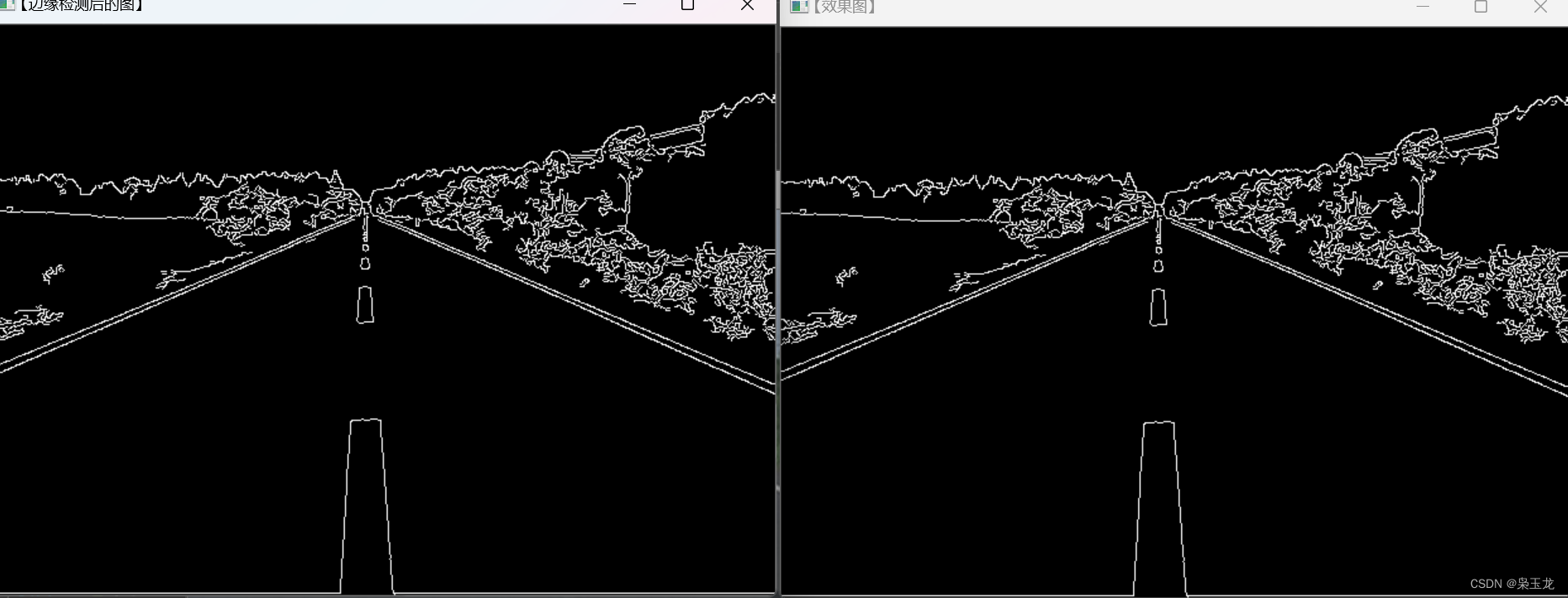
{//【1】载入原始图和 Mat变量定义Mat srcImage = imread("113.jpg"); //工程目录下应该有一张名为1. jpg的素材图Mat midImage, dstImage;//临时变量和目标图的定义//【2】进行边缘检测和转化为灰度图Canny(srcImage, midImage, 50, 200, 3);//进行一此 canny边缘检测cvtColor(midImage, dstImage, CV_GRAY2BGR);//转化边缘检测后的图为灰度图//【3】进行霍夫线变换vector<Vec2f> lines;//定义一个矢量结构lines用于存放得到的线段矢量集合HoughLines(midImage, lines, 1, CV_PI/180, 150, 0, 0 );//【4】依次在图中绘制出每条线段for (size_t i = 0; i < lines.size(); i++){float rho = lines[i][0], theta = lines[i][1];Point pt1, pt2;double a = cos(theta), b = sin(theta);double x0 = a * rho, y0 = b * rho;pt1.x = cvRound(x0 + 1000 * (-b));pt1.y = cvRound(y0 + 1000 * (a));pt2.x = cvRound(x0 - 1000 * (-b));pt2.y = cvRound(y0 - 1000 * (a));//此句代码的OpenCV2版为://line( dstImage, pt1, pt2, Scalar(55,100,195), 1, CV_AA);//此句代码的 OpenCV3版为:line(dstImage, pt1, pt2, Scalar(55, 100, 195), 1, LINE_AA);}//【5】显示原始图imshow("【原始图】", srcImage);//【6】边缘检测后的图imshow("【边缘检测后的图】", midImage);//【7】显示效果图imshow("【效果图】", dstImage);waitKey(0);return 0;
}
累计概率霍夫变换: HoughLinesP()函数
cv::HoughLinesP 是OpenCV库中用于执行概率霍夫直线变换(Probabilistic Hough Line Transform)的函数。概率霍夫直线变换与传统霍夫直线变换不同,它不需要计算每个像素的直线参数 (ρ, θ),而是通过连接边缘点的局部段来检测线段。这可以显著提高速度,特别是在处理大型图像时。
以下是 cv::HoughLinesP 函数的基本用法:
cv::HoughLinesP(image, lines, rho, theta, threshold, minLineLength, maxLineGap);
image: 输入的二值图像,通常是通过边缘检测算法生成的。lines: 存储检测到的直线段的容器。rho: 霍夫空间中的距离分辨率。通常设置为像素。theta: 霍夫空间中的角度分辨率。通常设置为弧度。threshold: 用于判断线段是否检测成功的阈值。只有当线段上的点数大于等于此阈值时,才会被接受。minLineLength: 最小线段长度。任何短于此长度的线段都会被忽略。maxLineGap: 允许将同一线段的两个线段断开的最大距离。
cv::HoughLinesP 函数将在输入图像上执行概率霍夫直线变换,识别线段,并将检测到的线段的起始点和终止点存储在 lines 容器中。
以下是一个简单的示例,演示如何使用 cv::HoughLinesP 检测线段:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>using namespace std;
using namespace cv;
#include <iostream>
#include <fstream>
using namespace cv; //包含cv命名空间
#include <opencv2/core/core.hpp>
//--【main()函数】 -//- -------- ---- -------------
// 描述: 控制台应用程序的入口函数, 我们的程序从这里开始
//.
int main()
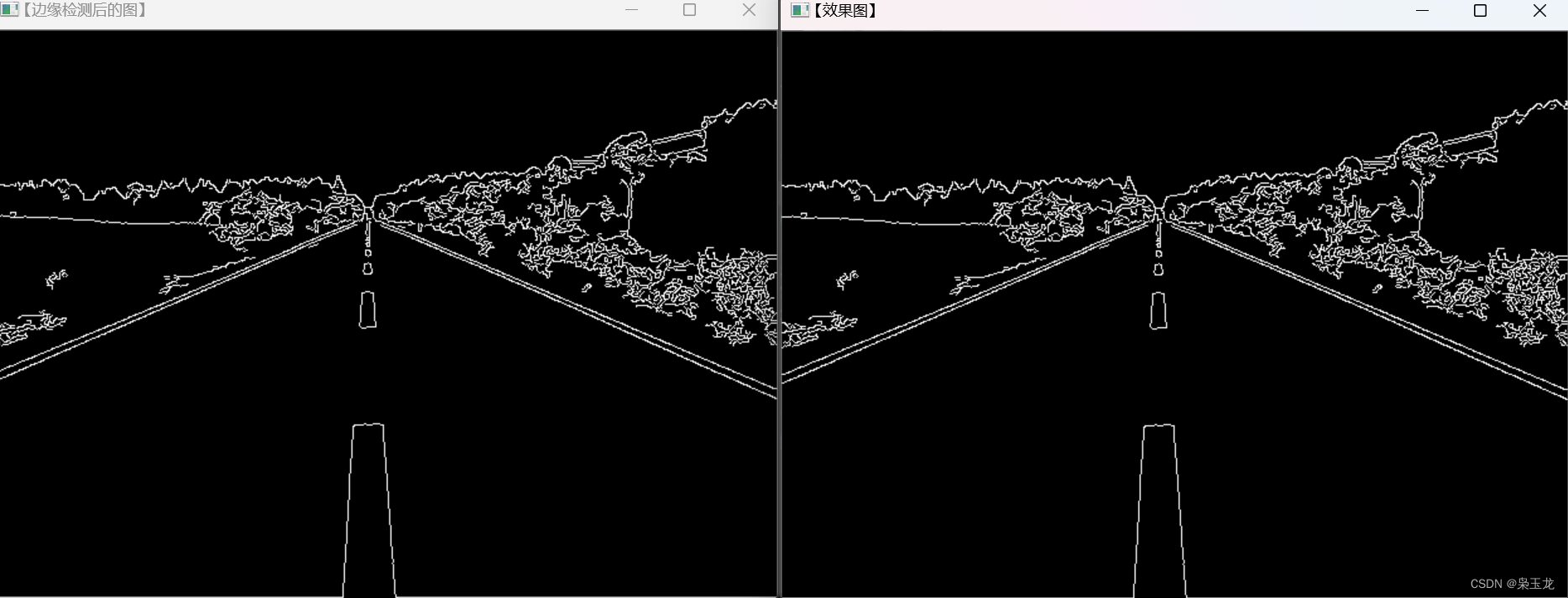
{//【1】载入原始图和Mat变量定义Mat srcImage = imread("113.jpg"); //工程目录下应该有一张名为1. jpg的素材图Mat midImage, dstImage;//临时变量和目标图的定义//【2】进行边缘检测和转化为灰度图Canny(srcImage, midImage, 50, 200, 3);//进行一此 canny边缘检测cvtColor(midImage, dstImage, COLOR_GRAY2BGR);//转化边缘检测后的图为灰度图//【3】进行霍夫线变换vector<Vec4i> lines;//定义一个矢量结构lines用于存放得到的线段矢量集合HoughLinesP(midImage, lines, 1, CV_PI/180, 80, 50, 10 );//【4】依次在图中绘制出每条线段for (size_t i = 0; i < lines.size(); i++){Vec4i l = lines[i];line(dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(186, 88, 255), 1, LINE_AA);//此句代码的OpenCV2版为://line( dstImage, Point(1[0], 1[1]), Point(1[2], 1[3]),Scalar(186,88,255), 1, CV_AA);//此句代码的OpenCV3版为:}//【5】显示原始图imshow("【原始图】", srcImage);//【6】边缘检测后的图imshow("【边缘检测后的图】", midImage);//【7】显示效果图imshow("【效果图】", dstImage);waitKey(0);return 0;
}这个示例加载了经过边缘检测的图像,然后使用 cv::HoughLinesP 函数检测线段,并在图像上绘制检测到的线段。请确保在 cv::HoughLinesP 函数中适当调整距离分辨率、角度分辨率、阈值、最小线段长度和最大线段断开距离以获得最佳的结果。
霍夫圆变换的函数:cv::HoughCircles
cv::HoughCircles 是OpenCV库中用于执行霍夫圆变换的函数。霍夫圆变换用于检测图像中的圆。以下是 cv::HoughCircles 函数的基本用法:
cv::HoughCircles(image, circles, cv::HOUGH_GRADIENT, dp, minDist, param1, param2, minRadius, maxRadius);
image: 输入的灰度图像,通常是通过边缘检测和预处理生成的。circles: 存储检测到的圆的容器。method: 用于检测圆的方法,通常使用cv::HOUGH_GRADIENT。dp: 累加器分辨率与图像分辨率的比例。通常设置为1。minDist: 检测到的圆之间的最小距离。param1: Canny边缘检测的高阈值。param2: 累加器阈值,用于确定检测到的圆。minRadius: 允许的最小圆半径。maxRadius: 允许的最大圆半径。
cv::HoughCircles 函数将在输入图像上执行霍夫圆变换,识别圆,并将检测到的圆的圆心坐标和半径存储在 circles 容器中。
以下是一个简单的示例,演示如何使用 cv::HoughCircles 检测圆:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>using namespace std;
using namespace cv;
#include <iostream>
#include <fstream>
using namespace cv; //包含cv命名空间
#include <opencv2/core/core.hpp>
//----【main()函数】------ -------- -
// 描述: 控制台应用程序的入口函数, 我们的程序从这里开始
int main()
{//【1】载入原始图、Mat 变量定义Mat srcImage = imread("2144.jpg"); //工程目录下应该有一张名为1. jpg的素材图Mat midImage, dstImage;//临时变量和目标图的定义//【2】显示原始图imshow("【原始图】", srcImage);//【3】转为灰度图并进行图像平滑cvtColor(srcImage, midImage, COLOR_BGR2GRAY);//转化边缘检测后的图为灰度图GaussianBlur(midImage, midImage, Size(9, 9), 2, 2);//【4】进行霍夫圆变换vector<Vec3f> circles;HoughCircles(midImage, circles, HOUGH_GRADIENT, 1.5, 10, 200, 100, 0, 0);//【5】依次在图中绘制出圆for (size_t i = 0; i < circles.size(); i++){//参数定义Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));int radius = cvRound(circles[i][2]);//绘制圆心circle(srcImage, center, 3, Scalar(0, 255, 0), -1, 8, 0);//绘制圆轮廓circle(srcImage, center, radius, Scalar(155, 50, 255), 3, 8, 0);}//【6】显示效果图imshow("【效果图】", srcImage);waitKey(0);return 0;
}相关文章:
c++视觉处理---霍夫变换
霍夫直线变换的函数 HoughLines 是OpenCV库中用于执行霍夫直线变换的函数。霍夫直线变换用于检测图像中的直线。下面是该函数的基本用法: cv::HoughLines(image, lines, rho, theta, threshold);image: 输入的二值图像,通常是通过边缘检测算法生成的。…...

el-table 边框颜色修改 简单有效!
废话不多说,直接上图 (1)修改前的图如下: 以上是elementUI原组件自带的样式 (2)下面是修改后的边框图如下: 源码如下: <el-table :data"jctableData" border size…...
Zabbix第二部分:基于Proxy分布式部署实现Web监控和Zabbix HA集群的搭建
代理和高可用 一、基于zabbix-proxy的分布式监控1.1 分布式监控的作用1.2 数据流向1.3 构成组件 二、部署zabbix代理服务器Step1 前置准备Step2 设置 zabbix 的下载源,安装 zabbix-proxyStep3 部署数据库并将zabbix相关文件导入Step4 修改zabbix-proxy的配置文件&am…...

JumpServer rce深入剖析
影响范围 JumpServer < v2.6.2 JumpServer < v2.5.4 JumpServer < v2.4.5 JumpServer v1.5.9 修复链接及参考 修改了一处代码: Git History 增加了一处鉴权 def connect(self):user self.scope["user"]if user.is_authenticated and …...
EasyExcel导入/导出Excel文件
EasyExcel导入/导出Excel文件简单写法 1、导入依赖 2、创建简单导入、导出demo 3、创建类 继承AnalysisEventListener(导入Excel监听解析表格数据) 4、创建类 基于注解 自定义Excel导出模版 1、导入EasyExcel依赖 <!--导入EasyExcel…...
力扣(LeetCode)2512. 奖励最顶尖的K名学生(C++)
优先队列哈希集合反向思维(或自定义排序) 模拟,请直接看算法思路: 两个哈希集合S1和S2, S1存正面词汇,S2存负面词汇;一个优先队列pq,pq存{score, id}键值对,即学生分数-学生id。 算法流程: 初…...
CubeMX+BabyOS 使用方法
MCU:STM32G030F 编译器:MDK 托管工具:Sourcetree CubeMX创建工程 BabyOS克隆 添加子模块 git submodule add https://gitee.com/notrynohigh/BabyOS.git BabyOS 切换dev 分支 查看当前分支 git branch -a 切换本地分支到dev git che…...
OpenResty安装-(基于Nginx的高性能Web平台,可在Nginx端编码业务)
文章目录 安装OpenResty1.安装1)安装开发库2)安装OpenResty仓库3)安装OpenResty4)安装opm工具5)目录结构6)配置nginx的环境变量 2.启动和运行3.备注 安装OpenResty 1.安装 首先你的Linux虚拟机必须联网 …...

算法-DFS+记忆化/动态规划-不同路径 II
算法-DFS记忆化/动态规划-不同路径 II 1 题目概述 1.1 题目出处 https://leetcode.cn/problems/unique-paths-ii 1.2 题目描述 2 DFS记忆化 2.1 思路 注意题意,每次要么往右,要么往下走,也就是说不能走回头路。但是仍有可能走到之前已经…...
黑盒测试方法:原理+实战
目录 一、如何设计测试用例 二、黑盒测试常用方法 1、基于需求进行测试用例的设计 2、等价类 3、边界值 4、判定表分析法(因果分析法) 5、正交表 6、场景设计法 三、案例补充 1、使用Fiddler模拟弱网 2、针对一个接口该如何测试 一、如何设计测试…...

SQLite事务处理
语法 BEGIN TRANSACTION; COMMIT TRANSACTION; (或END TRANSACTION;) ROLLBACK TRANSACTION; 事务处理 除了一些PRAGMA语句以外,其它访问数据库的语句会自动启动事务处理,并且在结束时自动提交。 通过上一节的命令可以手动控制…...

Java中CountDownLatch使用场景
在Java的并发API中,CountDownLatch是一个同步器,它允许一个或多个线程等待一组操作完成。 如果您正在开发一个服务器应用程序,该应用程序在开始处理请求之前需要初始化各种资源。这些资源可能是这样的: 加载配置文件建立数据库连…...

漏刻有时数据可视化Echarts组件开发(41)svg格式地图应用
1.定义SVG文件 var svg ;2.注册地图函数 Echarts.registerMap是Echarts图表库中用于注册地图的函数。它可以将第三方地图或自定义地图数据与Echarts进行集成,使用Echarts的API进行绘制。使用方法如下: echarts.registerMap(mapName, geoJson) 参数map…...

firefox的主题文件位置在哪?记录以防遗忘
这篇文章写点轻松的 最近找到了一个自己喜欢的firefox主题,很想把主题的背景图片找到,所以找了下主题文件所在位置 我的firefox版本:版本: 118.0.1 (64 位)主题名称: Sora Kawai 我的位置在 C:\Users\mizuhokaga\AppData\Roaming\Mozilla\Firefox\Profiles\w0e4e24v.default…...
Vuex获取、修改参数值及异步数据处理
14天阅读挑战赛 学不可以已... 目录 一、Vuex简介 1.1 vuex介绍 1.2 vuex核心 二、Vuex使用 2.1 Vuex安装 2.2 创建store模块 2.3 创建vuex的store实例并注册上面引入的各大模块 三、使用Vuex获取、修改值案例 3.1 创建两个菜单组件 3.2 配置路由 3.3 模拟菜单数据 …...
(二)】)
【 OpenGauss源码学习 —— 列存储(autoanalyze)(二)】
列存储(autoanalyze)(二) 概述PgStat_StatTabEntry 结构体pgstat_count_heap_insert 与 pgstat_count_cu_insert 函数CStoreInsert::BatchInsertCommon 函数pgstat_count_cu_update 函数pgstat_count_cu_delete 函数pgstat_count_…...

使用postman 调用 Webservice 接口
1. 先在浏览器地址栏 访问你的webService地址 地址格式: http://127.0.0.1:8092/xxxx/ws(这个自己的决定)/xxxxXccv?wsdl 2. post man POST 访问wwebService接口 地址格式: http://127.0.0.1:8092/xxxx/ws(这个自己的决定)/xxxxXccv <soapenv:Envelope xmlns:soapenv…...

程序员Google插件推荐
文章目录 AdBlock (广告拦截插件)SuperCopy 超级复制Octotree (github增强工具)GitZip for github (github增强工具)JSON-handleSimpleExtManager(管理谷歌插件)OneTab (标签页合并)PostWoman(接口调试)篡改猴 (Tampermonkey)FeHelper(前端助手) AdBlock (广告拦截插件) ☆ 拦截…...

机器学习中常见的监督学习方法和非监督学习方法有哪些。
问题描述:最近面试某些公司算法岗,看到一道简答题,让你举例熟悉的监督学习方法和非监督学习方法。 问题解答: 监督学习方法常见的比较多: 线性回归(Linear Regression): 用于回归问…...

UEFI基础——测试用例Hello Word
Hello 测试用例 硬件环境:龙芯ls3a6000平台 软件环境:龙芯uefi固件 GUID获取网址:https://guidgen.com 一、创建工程 mkdir TextPkg/三个文件 Hello.c 、 Hello.inf 、HelloPkg.dsc 1.1 Hello.c /** fileThe application to print hello …...
)
从一次生产事故复盘:我们如何优雅地处理用户上传的‘异常’Excel文件(附Apache POI配置详解)
从生产事故到防御体系:构建Excel文件处理的工程化解决方案那天凌晨2点,我被一阵急促的告警声惊醒。监控系统显示,核心文件处理服务的错误率在10分钟内飙升到35%,大量用户上传的Excel文件无法正常解析。更糟糕的是,部分…...

③ AI副业第一步:如何找到适合自己的AI赚钱赛道
③ AI副业第一步:如何找到适合自己的AI赚钱赛道选对赛道,努力才有意义。选错赛道,越努力离钱越远。前言:为什么大多数人AI副业做不起来? 我观察了100想做AI副业的人,失败的原因高度一致: 失败路…...

自制BLE112串口编程器:基于Bootloader的免调试器烧录方案
1. 项目概述:为BLE112模块打造一款免调试器的RS232编程器在嵌入式开发,特别是早期的蓝牙低功耗(BLE)模块应用中,我们常常会遇到一个棘手的问题:官方开发工具链的依赖和限制。以Silicon Labs(当时…...

如何快速掌握开源UE资产编辑器:UAssetGUI完整配置与实战指南
如何快速掌握开源UE资产编辑器:UAssetGUI完整配置与实战指南 【免费下载链接】UAssetGUI A tool designed for low-level examination and modification of Unreal Engine game assets by hand. 项目地址: https://gitcode.com/gh_mirrors/ua/UAssetGUI UAss…...

百度文心一言开发者如何通过Taotoken低成本接入多模型API
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 百度文心一言开发者如何通过Taotoken低成本接入多模型API 对于已经熟悉并正在使用百度文心一言等国产大模型API的开发者而言&#…...

深度解析DeTikZify:科研工作者的智能图表生成神器
深度解析DeTikZify:科研工作者的智能图表生成神器 【免费下载链接】DeTikZify Synthesizing Graphics Programs for Scientific Figures and Sketches with TikZ. 项目地址: https://gitcode.com/gh_mirrors/de/DeTikZify 在科研工作中,创建高质量…...

WebSocket实时通信架构进阶:Room、命名空间与集群部署
WebSocket实时通信架构进阶:Room、命名空间与集群部署 作者:Crown_22 | AI Agent & Hermes Agent 桌面程序开发者 前言 WebSocket已经成为实时应用的标准技术,但大多数教程只停留在"建立连接、发送消息"的基础阶段。在生产环境中,你需要处理Room管理、命名空…...

OpenCore Legacy Patcher完全指南:3步让旧款Mac焕发新生的终极方案
OpenCore Legacy Patcher完全指南:3步让旧款Mac焕发新生的终极方案 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 你是否拥有一台性能尚可但已被…...

微信小程序项目实战:从npm安装Vant Weapp到解决样式冲突的完整避坑指南
微信小程序工程化实战:Vant Weapp集成与样式冲突解决方案全解析 第一次在小程序里引入Vant Weapp时,我对着满屏错位的组件样式发呆了半小时——原本优雅的按钮变成了扭曲的色块,表单元素叠在一起像抽象画。这不是个例,根据社区反…...

ubuntu环境下为python项目配置taotoken多模型api密钥与端点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Ubuntu环境下为Python项目配置Taotoken多模型API密钥与端点 1. 准备工作 在Ubuntu系统上为Python项目接入Taotoken,首…...