cartographer(2)-launch-lua的配置
1.了解bag
| 1 | roscore | ||
| 2 | rosbag info rslidar-outdoor-gps.bag | 了解bag中topic的名称与类型 | duration: 3:33s types: geometry_msgs?QuaternionStamped nav_msgs_Odometry sensor_msgs/Imu sensor_msgs/IaserScan sensor_msgs/NavSatFix sensor_msgs/PointCloud2 tf2 msgs/TFMessage topics:/fix:gps的 /front_scan: 单线雷达数据 /heading: 两个GPS执行出来的航向 /imu: IMU的topic /odom_scout:里程计 /rslidar_points: 速腾的16点云数据 /tf: /tf_static: 静态的tf数据 |
| 3 | rosbag play rslidar-outdoor-gps.bag | 运行bag中topic的名称与类型 | 空格用于启动和停止 |
| 4 | rqt | 了解bag中的tf树. 1.plugins ->visualization->tf tree 2.plugins ->Introspection->node graph 看节点树 发布了很多topic数据 | |
| 5 | rviz | 可视化雷达数据与tf数据 rviz左侧最顶上的Fixed frame,手动输入 rviz左侧下方可添加显示的插件,选择添加pointcloud2,laserscan |
2.配置launch文件
目录:~/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros/launch
2.1 bag文件的地址和bag文件的名字
cp lx_rs16_2d_outdoor_l.launch mytest.launch
修改 mytest.launch
#1.修改default值#1.<!--bag的地址与名称 -->
<arg name="bag_filename" default="$(env HOME)/bagfiles/rslidar-outdoor-gps.bag"#2. 修改.lua文件# $(find cartographer_ros)/configuration_files ~/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros/configuration_files
#<!--启动cartographer --> 修改lua文件
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename mytest.lua "#3.修改点云 points2 单线雷达数据:scan 里程计odom
配置文件中的 与bag中的要一致<remap from="scan" to="front_scan"/> #front_scan
<remap from="odom" to="odom_scout"/> #front_scan
<remap from="imu" to="imu"/> #front_scan
2.2 lua文件的名字
2.3 topic需要remap成bag文件中发布的topic
3.配置Lua文件
cd:~/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros/configuration_files/
cp backpack_2d.lua mytest.lua
| tracking_frame: imu link base_link | imu_link | |
| published_frame cartographer: tf:最下边的一个坐标系 bag,tf树最上面一个坐标系 | odom | |
| provide_odom_frame:是否提供里程计 bag中有,此处为false | false | |
| use_pose_extrapolator :一定是false | false | |
| use_odometry:是否使用里程计的传感器数据,如果为true,tf树中存odom这个坐标系 | false | |
| use_nav_sat:是否使用GPS数据,true时会订阅gps的topic | false | |
| use_landmarks: | false | |
| num_laser_scans=1 #单线云 num_multi_echo_laser_scans=0 #多回声雷达 num_subdivisions_per_laser_scan=1 num_point_clouds=1 #多线点云 num_point_clouds 多线点云的话题的数量,可以同时为1,不可以同时为0 订阅话题的个数 {}内参数是有,的 外参数没有, | ||
| MAP_BUILDER.use_trajectory_builder_2d=true TRAJECTORY_BUILDER_2D.use_imu_data=true 是否使用imu, | ||
| TRAJECTORY_BUILDER_2D.min_z=-0.1 点云的最小z的范围,单线点云不能设置大于0的值(不设置),多线点云的这个值要大于0 |
1.重新编译
cd ~/carto_ws/cartographer_detailed_comments_ws/
./catkin_make.sh
2.重新启动
roslaunch cartographer_ros mytest.launch
相关文章:
-launch-lua的配置)
cartographer(2)-launch-lua的配置
1.了解bag 1roscore2rosbag info rslidar-outdoor-gps.bag了解bag中topic的名称与类型duration: 3:33s types: geometry_msgs?QuaternionStamped nav_msgs_Odometry sensor_msgs/Imu sensor_msgs/IaserScan sensor_msgs/NavSatFix sensor_msgs/PointCloud2 tf2 msgs/TFMe…...
【C++设计模式之责任链模式:行为型】分析及示例
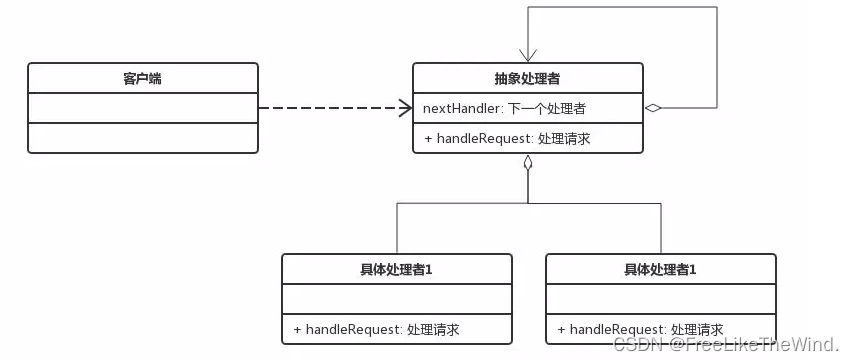
简介 责任链模式是一种行为型设计模式,它允许将请求沿着处理链传递,直到有一个处理器能够处理该请求。这种模式将请求的发送者和接收者解耦,同时提供了更高的灵活性和可扩展性。 描述 责任链模式由多个处理器组成一个处理链,每…...

如何选择编程语言Python Go还是Rust?
选择编程语言需要考虑多个方面,包括语言的特性、社区支持、工作机会、学习曲线等。下面是关于Python Go和Rust的一些介绍。 1.基本语法 1. Python: Python 是一种脚本语言,以简洁、易读的语法著称。以下是 Python 的基本语法示例: # Hello…...
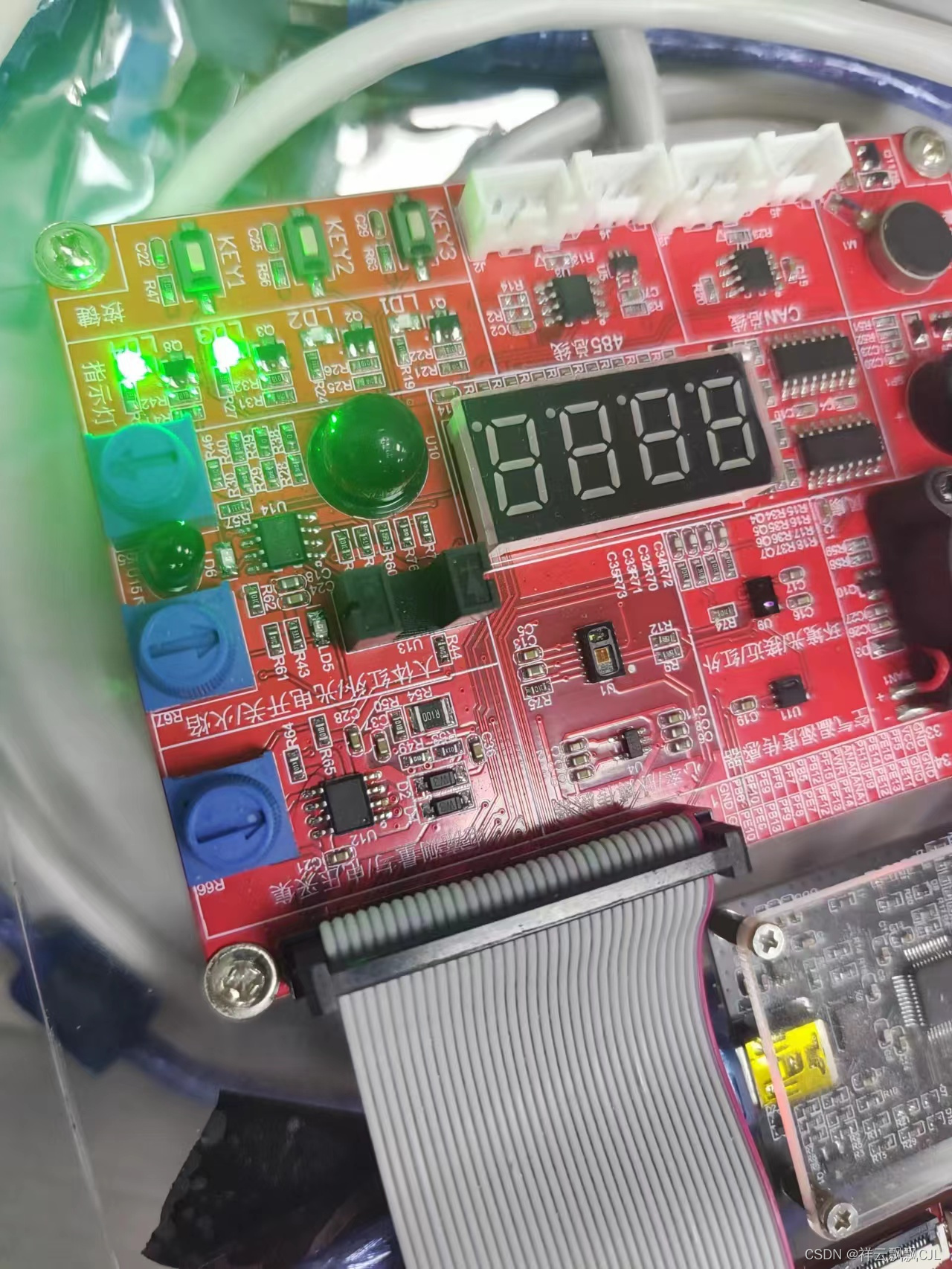
CAN和CANFD通信介绍
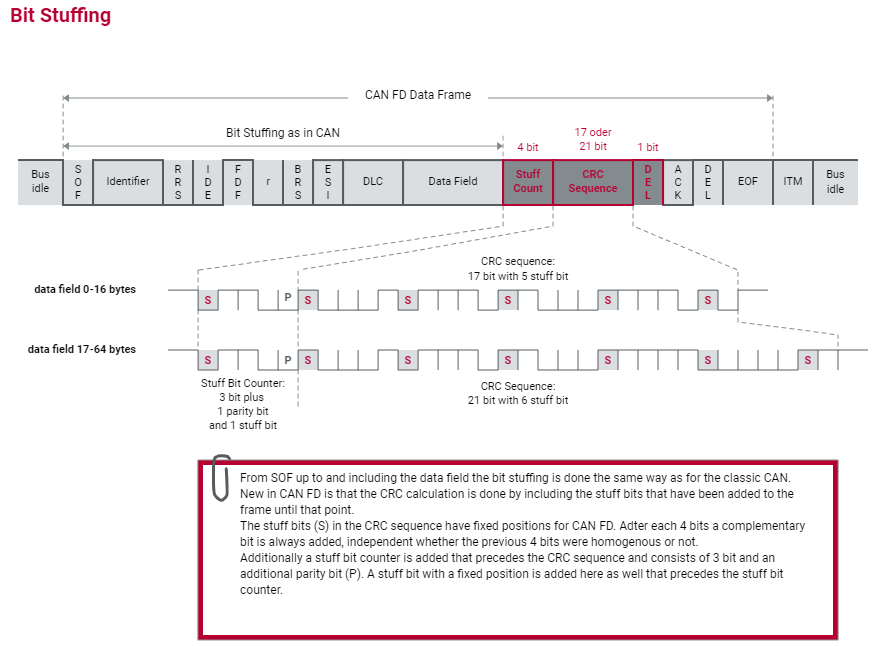
CAN(Controller Area Network,控制器局域网)是一种串行通信技术,专门用于在汽车电子控制单元(ECU)之间实现可靠的数据交换。 CAN协议介绍 电子化 汽车近年来的发展呈现出以电子化为主的特点。电子化的主…...

解决网页 H5 对接微信 JSSDK 后自定义分享和跳转APP等没效果
导致的原因 在聊天窗口直接点击一个文本链接,现在微信JSSDK已经不支持这样使用。 解决办法1 将文本链接生成一个二维码,然后微信扫码进入这个链接。 解决办法2 将这个文本链接收藏,然后从收藏打开这个链接。...

基于DeOldify的给黑白照片、视频上色
老照片常常因为当时的技术限制而只有黑白版本。然而现代的 AI 技术,如 DeOldify,可以让这些照片重现色彩。 本教程将详细介绍如何使用 DeOldify 来给老照片上色。 文章目录 准备工作执行代码图片上色视频上色 总结 准备工作 这里用 git clone 命令克隆…...

腾讯云饥荒服务器配置选择和费用价格表
腾讯云饥荒服务器配置选择和费用价格表,腾讯云饥荒服务器配置怎么选择?CPU内存几核几G合适?饥荒服务器配置:建议2核4G起步,可以加载更多的MOD,不会太卡。因为15MOD启动后会占用1GB多内存,这是32…...
聊聊MySql索引的类型以及失效场景
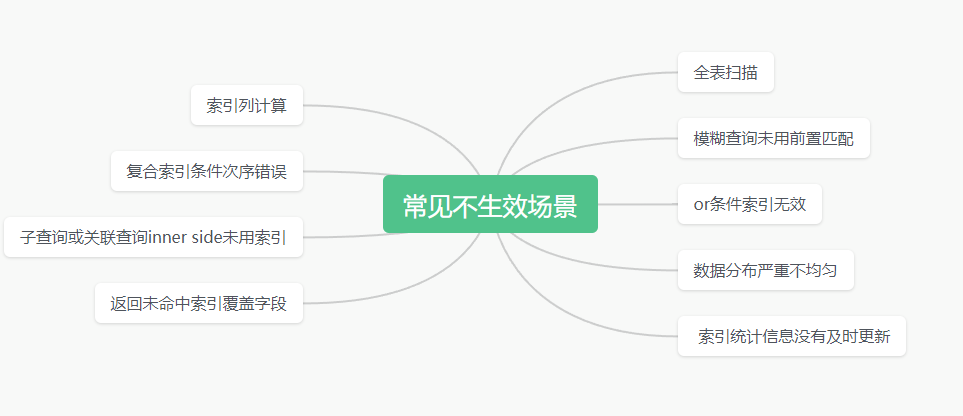
文章目录 概念常见的索引1.B树索引2.哈希索引3.全文索引4.空间索引5.聚集索引 如何设计合理?1.明确索引需求2.选择索引列3.选择索引类型4.考虑索引维护开销5.设计联合索引6.删除不必要索引7.关注索引统计信息8.测试查询效果 常见不生效场景1.全表扫描2.索引列计算3.…...
零代码编程:用ChatGPT批量调整文件名称中的词汇顺序
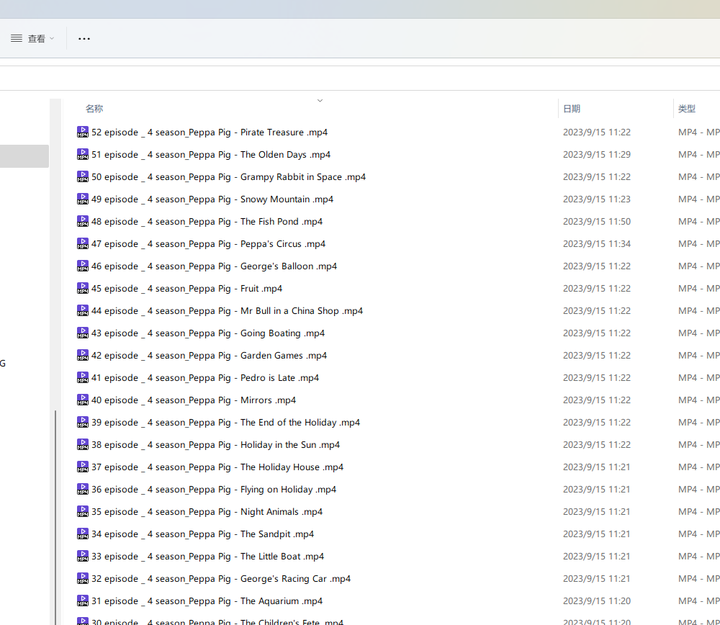
文件夹里面很多文件,需要批量挑战标题中的一些词组顺序:“Peppa Pig - Kylie Kangaroo (14 episode _ 4 season) [HD].mp4”这个文件名改成“14 episode _ 4 season _ Peppa Pig - Kylie Kangaroo.mp4”,可以在ChatGPT中输入提示词࿱…...
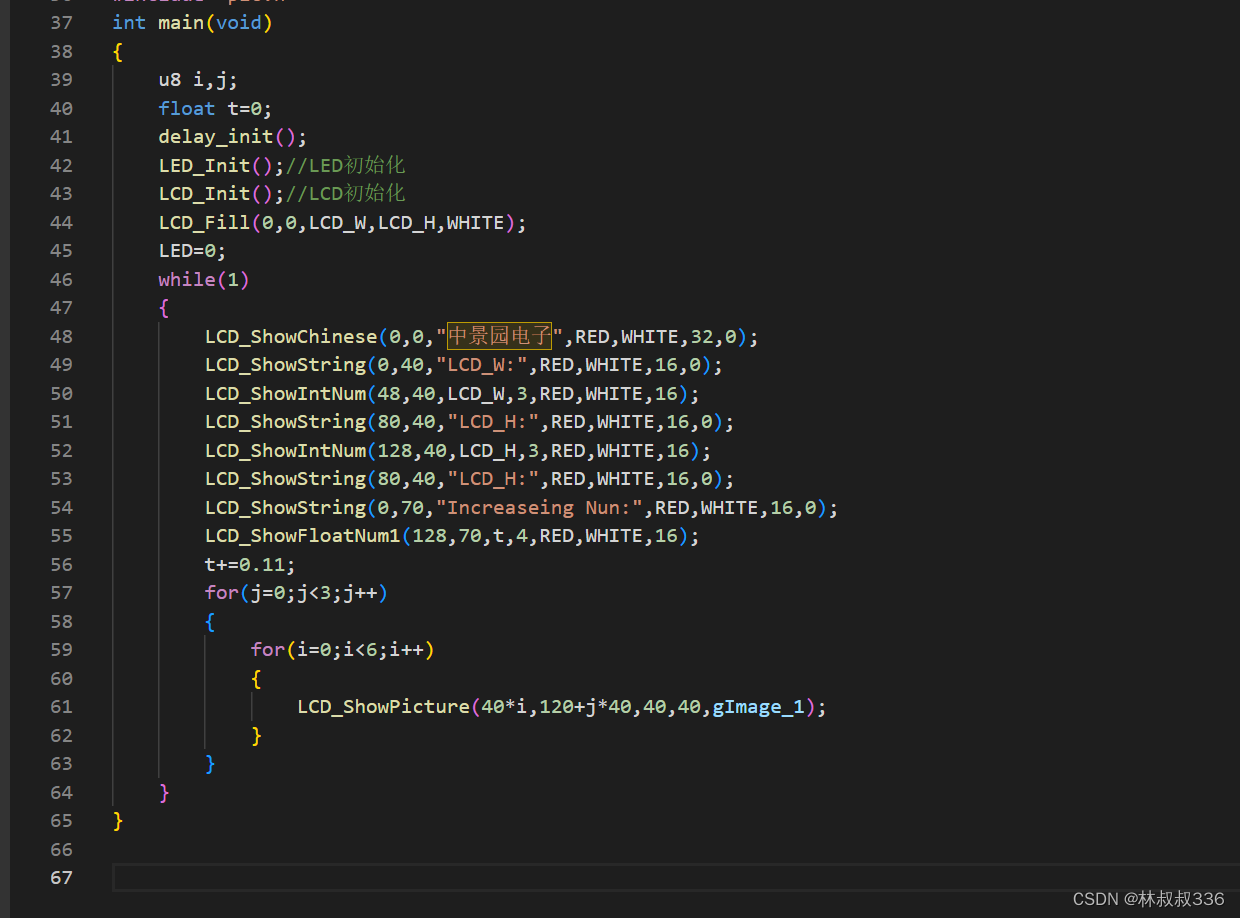
stm32 hal库 st7789 1.54寸lcd
文章目录 前言一、软件spi1.cubemx配置2.源码文件 二、硬件spi1.cubemx配置2.源码文件3.小小修改 总结 前言 1.54寸lcd 240*240 一、软件spi 1.cubemx配置 一定要注意把这几个东西上拉。 使用c8 2.源码文件 我使用的是中景园的源码,他本来是是标准库的稍微修改…...
【arm实验1】GPIO实验-LED灯的流水亮灭
linuxlinux:~/study/01-asm$ cat asm-led.S .text .global _start _start: 1.设置GPIOE寄存器的时钟使能 RCC_MP_AHB4ENSETR[4]->1 0x50000a28 LDR R0,0X50000A28 LDR R1,[R0] 从r0为起始地址的4字节数据取出放在R1 ORR R1,R1,#(0x1<<4) 第4位设置为1 ORR R…...

MySQL关联数据表操作方式
1、准备工作(创建数据表) create table employee( emp_id int primary key, name varchar(20), birth_date date, sex varchar(1), salary int, branch_id int, sup_id int );create table client( client_id int primary key, client_name varchar(20)…...
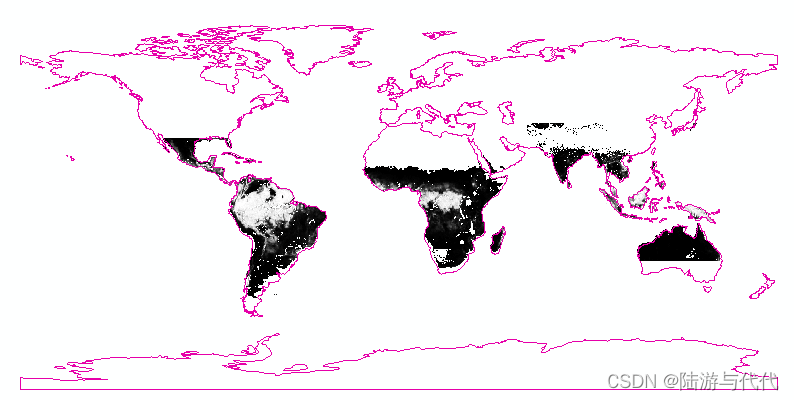
SMOS数据处理,投影变换,‘EPSG:6933‘转为‘EPSG:4326‘
在处理SMOS数据时,遇到了读取nc数据并存为tif后,影像投影无法改变,因此全球数据无法重叠。源数据的投影为EPSG:6933,希望转为EPSG:4326。 解决代码。 python import os import netCDF4 as nc import numpy as np from osgeo impo…...
游戏服务端性能测试实战总结
导语:近期经历了一系列的性能测试,涵盖了Web服务器和游戏服务器的领域。在这篇文章中,我将会对游戏服务端所做的测试进行详细整理和记录。需要注意的是,本文着重于记录,而并非深入的编程讨论。在这里,我将与…...

塔望食观察 | 中国海参产业发展现状及挑战
海参,一个古老的物种,堪称海底活化石,据资料显示,海参在地球上存活超过6亿年,比恐龙还早。海参的药用、食疗和营养滋补价值极高,清朝学者赵学敏编的《本草纲目拾遗》有这样的叙述:“海参性温补&…...
springboot 捕获特点异常信息并处理
前端获取效果图 springboot 捕获特点异常信息并处理 import com.one.utils.JSONResult; //JSONResult定义处理结果对象 import org.springframework.web.bind.annotation.ExceptionHandler...
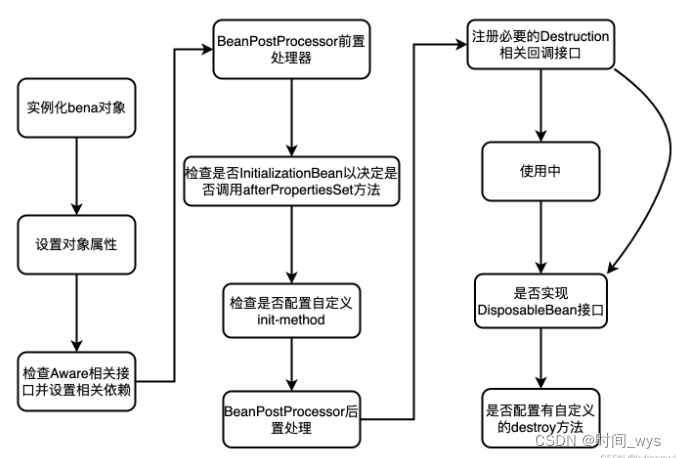
【Spring框架学习3】Spring Bean的作用域 及 生命周期
一、Spring Bean的作用域有哪些? Spring框架支持以下五种Bean的作用域: Singleton:这是默认的作用域,在每个Spring IoC容器中只有一个Bean的实例(IoC初始化后)。Spring 中的 bean 默认都是单例的,是对单例设计模式的…...

多线程并发篇---第四篇
系列文章目录 文章目录 系列文章目录一、Java中synchronized 和 ReentrantLock 有什么不同?二、有三个线程T1,T2,T3,如何保证顺序执行?三、SynchronizedMap和ConcurrentHashMap有什么区别?一、Java中synchronized 和 ReentrantLock 有什么不同? 相似点: 这两种同步方式有…...
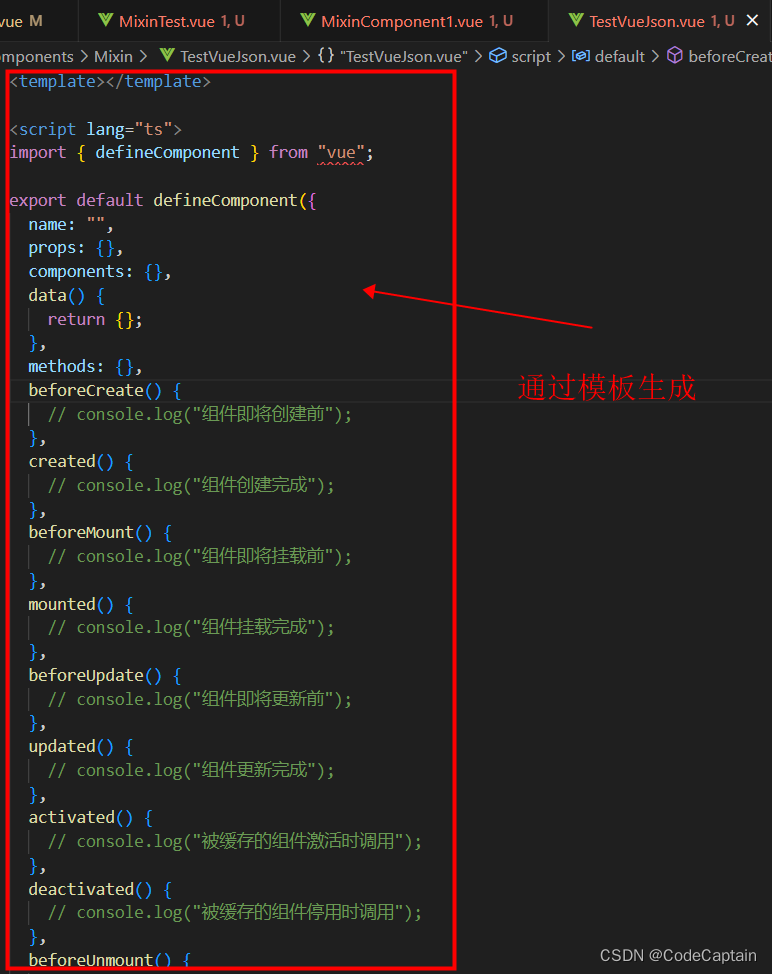
vs code 添加vue3代码模板方法
最终效果 vs code 添加vue文件模板用于通过简写自动生成代码 操作步骤如下 1.找到vue模板代码编写入口 2.修改模板内容 2.1 vue.json内容 {// Place your snippets for vue here. Each snippet is defined under a snippet name and has a prefix, body and// description. T…...
怎么通过Fiddler对APP进行抓包?以及高级应用场景分析
前言 我们经常需要用到Fiddler做代理服务器对Web、APP应用进行抓包,以便我们对接口功能进行测试调试,定位问题等。这篇将讲述怎么通过Fiddler对APP进行抓包,以及简单介绍一些高级应用场景。 首先,附上Fiddler使用的环境配置清单…...

Unity安卓构建72小时实战指南:从零到真机运行
1. 这不是“又一本Unity教程”,而是我带三个新人从零上线第一款安卓游戏的真实路径你点开这个标题,大概率正站在两个路口之间:一边是满屏“30天速成Unity”“零基础做爆款”的短视频封面,一边是你刚下载完Unity Hub、卡在Android …...
上午题回忆与解析(非标答版))
2026上半年数据库系统工程师(软考)上午题回忆与解析(非标答版)
本文为考后回忆整理,非官方标准答案,旨在为考后对答案及下半年备考的同学提供参考。题目顺序和表述可能与原卷有出入,欢迎在评论区指正、补充。📊 整体考情分析 刚结束的2026年上半年数据库系统工程师考试,上午题的风格…...

Linux服务器被挖矿木马劫持的五步应急处置指南
1. 这不是“中病毒”,是服务器被劫持成了矿机——先别慌,但必须立刻断网“服务器被黑客攻击,用来挖矿!”——这句话在运维圈里一出,比收到OOM告警还让人头皮发紧。它不像网页被挂马、数据库被拖库那样有明显业务影响&a…...
做电影评论情感分类)
告别数据饥荒:用PyTorch手把手实现原型网络(Prototypical Networks)做电影评论情感分类
告别数据饥荒:用PyTorch手把手实现原型网络做电影评论情感分类 在自然语言处理领域,情感分析一直是热门研究方向,但现实中的开发者常面临一个尴尬困境:标注数据太少。传统深度学习方法动辄需要成千上万的标注样本,而实…...

为什么鸿蒙 App 最终都会走向状态驱动?
子玥酱 (掘金 / 知乎 / CSDN / 简书 同名) 大家好,我是 子玥酱,一名长期深耕在一线的前端程序媛 👩💻。曾就职于多家知名互联网大厂,目前在某国企负责前端软件研发相关工作,主要聚…...
)
实战对比:用直方图均衡化与CLAHE拯救你的背光/过曝照片(附Python完整代码)
拯救逆光废片:直方图均衡化与CLAHE的实战效果对比每次旅行回来整理照片时,总会有几张因为光线问题几乎要删除的废片——要么是逆光下的人脸黑得看不清五官,要么是天空过曝失去所有云层细节。这些照片往往记录着重要时刻,直接删除实…...

数字合成器d-FORMANT:从模拟经典到数字复刻的工程实践
1. 项目概述:从模拟经典到数字复刻如果你对合成器稍有了解,或者对电子音乐制作背后的硬件感兴趣,那么“FORMANT”这个名字你一定不陌生。它最初是上世纪70年代由《Elektor》杂志发布的一款模拟单音合成器,以其清晰的模块化设计和出…...

Windows Cleaner如何5步解决C盘爆红问题?完全指南助你释放宝贵空间
Windows Cleaner如何5步解决C盘爆红问题?完全指南助你释放宝贵空间 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否曾经面对C盘爆红的警告束手无…...

在多模型聚合场景下利用Taotoken实现API调用的自动降级与容灾
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在多模型聚合场景下利用Taotoken实现API调用的自动降级与容灾 对于依赖大模型API的生产系统而言,服务的连续性与稳定性…...

C语言--day19
第十章 内存管理当./a.out 运行起来后,系统会给a.out分配一段内存区域1、code ,存放编写好的c语言代码。 只读特性,在运行期间不能修改2、data 数据段。 存储全局变量,和被static 修改的变量细分:data 数据段ÿ…...