yolov8剪枝实践
本文使用的剪枝库是torch-pruning ,实验了该库的三个剪枝算法GroupNormPruner、BNScalePruner和GrowingRegPruner。
安装使用
- 安装依赖库
pip install torch-pruning
- 把 https://github.com/VainF/Torch-Pruning/blob/master/examples/yolov8/yolov8_pruning.py,文件拷贝到yolov8的根目录下。或者使用我的剪枝代码,在原有的基础上稍作修改,保存了不同剪枝阶段的模型。
# This code is adapted from Issue [#147](https://github.com/VainF/Torch-Pruning/issues/147), implemented by @Hyunseok-Kim0.
import argparse
import math
import os
os.environ["CUDA_VISIBLE_DEVICES"] = "7"
from copy import deepcopy
from datetime import datetime
from pathlib import Path
from typing import List, Unionimport numpy as np
import torch
import torch.nn as nn
from matplotlib import pyplot as plt
from ultralytics import YOLO, __version__
from ultralytics.nn.modules import Detect, C2f, Conv, Bottleneck
from ultralytics.nn.tasks import attempt_load_one_weight
from ultralytics.yolo.engine.model import TASK_MAP
from ultralytics.yolo.engine.trainer import BaseTrainer
from ultralytics.yolo.utils import yaml_load, LOGGER, RANK, DEFAULT_CFG_DICT, DEFAULT_CFG_KEYS
from ultralytics.yolo.utils.checks import check_yaml
from ultralytics.yolo.utils.torch_utils import initialize_weights, de_parallelimport torch_pruning as tpdef save_pruning_performance_graph(x, y1, y2, y3):"""Draw performance change graphParameters----------x : ListParameter numbers of all pruning stepsy1 : ListmAPs after fine-tuning of all pruning stepsy2 : ListMACs of all pruning stepsy3 : ListmAPs after pruning (not fine-tuned) of all pruning stepsReturns-------"""try:plt.style.use("ggplot")except:passx, y1, y2, y3 = np.array(x), np.array(y1), np.array(y2), np.array(y3)y2_ratio = y2 / y2[0]# create the figure and the axis objectfig, ax = plt.subplots(figsize=(8, 6))# plot the pruned mAP and recovered mAPax.set_xlabel('Pruning Ratio')ax.set_ylabel('mAP')ax.plot(x, y1, label='recovered mAP')ax.scatter(x, y1)ax.plot(x, y3, color='tab:gray', label='pruned mAP')ax.scatter(x, y3, color='tab:gray')# create a second axis that shares the same x-axisax2 = ax.twinx()# plot the second set of dataax2.set_ylabel('MACs')ax2.plot(x, y2_ratio, color='tab:orange', label='MACs')ax2.scatter(x, y2_ratio, color='tab:orange')# add a legendlines, labels = ax.get_legend_handles_labels()lines2, labels2 = ax2.get_legend_handles_labels()ax2.legend(lines + lines2, labels + labels2, loc='best')ax.set_xlim(105, -5)ax.set_ylim(0, max(y1) + 0.05)ax2.set_ylim(0.05, 1.05)# calculate the highest and lowest points for each set of datamax_y1_idx = np.argmax(y1)min_y1_idx = np.argmin(y1)max_y2_idx = np.argmax(y2)min_y2_idx = np.argmin(y2)max_y1 = y1[max_y1_idx]min_y1 = y1[min_y1_idx]max_y2 = y2_ratio[max_y2_idx]min_y2 = y2_ratio[min_y2_idx]# add text for the highest and lowest values near the pointsax.text(x[max_y1_idx], max_y1 - 0.05, f'max mAP = {max_y1:.2f}', fontsize=10)ax.text(x[min_y1_idx], min_y1 + 0.02, f'min mAP = {min_y1:.2f}', fontsize=10)ax2.text(x[max_y2_idx], max_y2 - 0.05, f'max MACs = {max_y2 * y2[0] / 1e9:.2f}G', fontsize=10)ax2.text(x[min_y2_idx], min_y2 + 0.02, f'min MACs = {min_y2 * y2[0] / 1e9:.2f}G', fontsize=10)plt.title('Comparison of mAP and MACs with Pruning Ratio')plt.savefig('pruning_perf_change.png')def infer_shortcut(bottleneck):c1 = bottleneck.cv1.conv.in_channelsc2 = bottleneck.cv2.conv.out_channelsreturn c1 == c2 and hasattr(bottleneck, 'add') and bottleneck.addclass C2f_v2(nn.Module):# CSP Bottleneck with 2 convolutionsdef __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansionsuper().__init__()self.c = int(c2 * e) # hidden channelsself.cv0 = Conv(c1, self.c, 1, 1)self.cv1 = Conv(c1, self.c, 1, 1)self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))def forward(self, x):# y = list(self.cv1(x).chunk(2, 1))y = [self.cv0(x), self.cv1(x)]y.extend(m(y[-1]) for m in self.m)return self.cv2(torch.cat(y, 1))def transfer_weights(c2f, c2f_v2):c2f_v2.cv2 = c2f.cv2c2f_v2.m = c2f.mstate_dict = c2f.state_dict()state_dict_v2 = c2f_v2.state_dict()# Transfer cv1 weights from C2f to cv0 and cv1 in C2f_v2old_weight = state_dict['cv1.conv.weight']half_channels = old_weight.shape[0] // 2state_dict_v2['cv0.conv.weight'] = old_weight[:half_channels]state_dict_v2['cv1.conv.weight'] = old_weight[half_channels:]# Transfer cv1 batchnorm weights and buffers from C2f to cv0 and cv1 in C2f_v2for bn_key in ['weight', 'bias', 'running_mean', 'running_var']:old_bn = state_dict[f'cv1.bn.{bn_key}']state_dict_v2[f'cv0.bn.{bn_key}'] = old_bn[:half_channels]state_dict_v2[f'cv1.bn.{bn_key}'] = old_bn[half_channels:]# Transfer remaining weights and buffersfor key in state_dict:if not key.startswith('cv1.'):state_dict_v2[key] = state_dict[key]# Transfer all non-method attributesfor attr_name in dir(c2f):attr_value = getattr(c2f, attr_name)if not callable(attr_value) and '_' not in attr_name:setattr(c2f_v2, attr_name, attr_value)c2f_v2.load_state_dict(state_dict_v2)def replace_c2f_with_c2f_v2(module):for name, child_module in module.named_children():if isinstance(child_module, C2f):# Replace C2f with C2f_v2 while preserving its parametersshortcut = infer_shortcut(child_module.m[0])c2f_v2 = C2f_v2(child_module.cv1.conv.in_channels, child_module.cv2.conv.out_channels,n=len(child_module.m), shortcut=shortcut,g=child_module.m[0].cv2.conv.groups,e=child_module.c / child_module.cv2.conv.out_channels)transfer_weights(child_module, c2f_v2)setattr(module, name, c2f_v2)else:replace_c2f_with_c2f_v2(child_module)def save_model_v2(self: BaseTrainer):"""Disabled half precision saving. originated from ultralytics/yolo/engine/trainer.py"""ckpt = {'epoch': self.epoch,'best_fitness': self.best_fitness,'model': deepcopy(de_parallel(self.model)),'ema': deepcopy(self.ema.ema),'updates': self.ema.updates,'optimizer': self.optimizer.state_dict(),'train_args': vars(self.args), # save as dict'date': datetime.now().isoformat(),'version': __version__}# Save last, best and deletetorch.save(ckpt, self.last)if self.best_fitness == self.fitness:torch.save(ckpt, self.best)if (self.epoch > 0) and (self.save_period > 0) and (self.epoch % self.save_period == 0):torch.save(ckpt, self.wdir / f'epoch{self.epoch}.pt')del ckptdef final_eval_v2(self: BaseTrainer):"""originated from ultralytics/yolo/engine/trainer.py"""for f in self.last, self.best:if f.exists():strip_optimizer_v2(f) # strip optimizersif f is self.best:LOGGER.info(f'\nValidating {f}...')self.metrics = self.validator(model=f)self.metrics.pop('fitness', None)self.run_callbacks('on_fit_epoch_end')def strip_optimizer_v2(f: Union[str, Path] = 'best.pt', s: str = '') -> None:"""Disabled half precision saving. originated from ultralytics/yolo/utils/torch_utils.py"""x = torch.load(f, map_location=torch.device('cpu'))args = {**DEFAULT_CFG_DICT, **x['train_args']} # combine model args with default args, preferring model argsif x.get('ema'):x['model'] = x['ema'] # replace model with emafor k in 'optimizer', 'ema', 'updates': # keysx[k] = Nonefor p in x['model'].parameters():p.requires_grad = Falsex['train_args'] = {k: v for k, v in args.items() if k in DEFAULT_CFG_KEYS} # strip non-default keys# x['model'].args = x['train_args']torch.save(x, s or f)mb = os.path.getsize(s or f) / 1E6 # filesizeLOGGER.info(f"Optimizer stripped from {f},{f' saved as {s},' if s else ''} {mb:.1f}MB")def train_v2(self: YOLO, pruning=False, **kwargs):"""Disabled loading new model when pruning flag is set. originated from ultralytics/yolo/engine/model.py"""self._check_is_pytorch_model()if self.session: # Ultralytics HUB sessionif any(kwargs):LOGGER.warning('WARNING ⚠️ using HUB training arguments, ignoring local training arguments.')kwargs = self.session.train_argsoverrides = self.overrides.copy()overrides.update(kwargs)if kwargs.get('cfg'):LOGGER.info(f"cfg file passed. Overriding default params with {kwargs['cfg']}.")overrides = yaml_load(check_yaml(kwargs['cfg']))overrides['mode'] = 'train'if not overrides.get('data'):raise AttributeError("Dataset required but missing, i.e. pass 'data=coco128.yaml'")if overrides.get('resume'):overrides['resume'] = self.ckpt_pathself.task = overrides.get('task') or self.taskself.trainer = TASK_MAP[self.task][1](overrides=overrides, _callbacks=self.callbacks)if not pruning:if not overrides.get('resume'): # manually set model only if not resumingself.trainer.model = self.trainer.get_model(weights=self.model if self.ckpt else None, cfg=self.model.yaml)self.model = self.trainer.modelelse:# pruning modeself.trainer.pruning = Trueself.trainer.model = self.model# replace some functions to disable half precision savingself.trainer.save_model = save_model_v2.__get__(self.trainer)self.trainer.final_eval = final_eval_v2.__get__(self.trainer)self.trainer.hub_session = self.session # attach optional HUB sessionself.trainer.train()# Update model and cfg after trainingif RANK in (-1, 0):self.model, _ = attempt_load_one_weight(str(self.trainer.best))self.overrides = self.model.argsself.metrics = getattr(self.trainer.validator, 'metrics', None)def prune(args):# load trained yolov8 modelbase_name = 'prune/' + str(datetime.now()) + '/'model = YOLO(args.model)model.__setattr__("train_v2", train_v2.__get__(model))pruning_cfg = yaml_load(check_yaml(args.cfg))batch_size = pruning_cfg['batch']# use coco128 dataset for 10 epochs fine-tuning each pruning iteration step# this part is only for sample code, number of epochs should be included in config filepruning_cfg['data'] = "./ultralytics/datasets/soccer.yaml"pruning_cfg['epochs'] = 4model.model.train()replace_c2f_with_c2f_v2(model.model)initialize_weights(model.model) # set BN.eps, momentum, ReLU.inplacefor name, param in model.model.named_parameters():param.requires_grad = Trueexample_inputs = torch.randn(1, 3, pruning_cfg["imgsz"], pruning_cfg["imgsz"]).to(model.device)macs_list, nparams_list, map_list, pruned_map_list = [], [], [], []base_macs, base_nparams = tp.utils.count_ops_and_params(model.model, example_inputs)# do validation before pruning modelpruning_cfg['name'] = base_name+f"baseline_val"pruning_cfg['batch'] = 128validation_model = deepcopy(model)metric = validation_model.val(**pruning_cfg)init_map = metric.box.mapmacs_list.append(base_macs)nparams_list.append(100)map_list.append(init_map)pruned_map_list.append(init_map)print(f"Before Pruning: MACs={base_macs / 1e9: .5f} G, #Params={base_nparams / 1e6: .5f} M, mAP={init_map: .5f}")# prune same ratio of filter based on initial sizech_sparsity = 1 - math.pow((1 - args.target_prune_rate), 1 / args.iterative_steps)for i in range(args.iterative_steps):model.model.train()for name, param in model.model.named_parameters():param.requires_grad = Trueignored_layers = []unwrapped_parameters = []for m in model.model.modules():if isinstance(m, (Detect,)):ignored_layers.append(m)example_inputs = example_inputs.to(model.device)pruner = tp.pruner.GroupNormPruner(model.model,example_inputs,importance=tp.importance.GroupNormImportance(), # L2 norm pruning,iterative_steps=1,ch_sparsity=ch_sparsity,ignored_layers=ignored_layers,unwrapped_parameters=unwrapped_parameters)# Test regularization#output = model.model(example_inputs)#(output[0].sum() + sum([o.sum() for o in output[1]])).backward()#pruner.regularize(model.model)pruner.step()# pre fine-tuning validationpruning_cfg['name'] = base_name+f"step_{i}_pre_val"pruning_cfg['batch'] = 128validation_model.model = deepcopy(model.model)metric = validation_model.val(**pruning_cfg)pruned_map = metric.box.mappruned_macs, pruned_nparams = tp.utils.count_ops_and_params(pruner.model, example_inputs.to(model.device))current_speed_up = float(macs_list[0]) / pruned_macsprint(f"After pruning iter {i + 1}: MACs={pruned_macs / 1e9} G, #Params={pruned_nparams / 1e6} M, "f"mAP={pruned_map}, speed up={current_speed_up}")# fine-tuningfor name, param in model.model.named_parameters():param.requires_grad = Truepruning_cfg['name'] = base_name+f"step_{i}_finetune"pruning_cfg['batch'] = batch_size # restore batch sizemodel.train_v2(pruning=True, **pruning_cfg)# post fine-tuning validationpruning_cfg['name'] = base_name+f"step_{i}_post_val"pruning_cfg['batch'] = 128validation_model = YOLO(model.trainer.best)metric = validation_model.val(**pruning_cfg)current_map = metric.box.mapprint(f"After fine tuning mAP={current_map}")macs_list.append(pruned_macs)nparams_list.append(pruned_nparams / base_nparams * 100)pruned_map_list.append(pruned_map)map_list.append(current_map)# remove pruner after single iterationdel prunermodel.model.zero_grad() # Remove gradientssave_path = 'runs/detect/'+base_name+f"step_{i}_pruned_model.pth"torch.save(model.model,save_path) # without .state_dictprint('pruned model saved in',save_path)# model = torch.load('model.pth') # load the pruned modelsave_pruning_performance_graph(nparams_list, map_list, macs_list, pruned_map_list)# if init_map - current_map > args.max_map_drop:# print("Pruning early stop")# break# model.export(format='onnx')if __name__ == "__main__":parser = argparse.ArgumentParser()parser.add_argument('--model', default='runs/detect/train/weights/last.pt', help='Pretrained pruning target model file')parser.add_argument('--cfg', default='default.yaml',help='Pruning config file.'' This file should have same format with ultralytics/yolo/cfg/default.yaml')parser.add_argument('--iterative-steps', default=4, type=int, help='Total pruning iteration step')parser.add_argument('--target-prune-rate', default=0.2, type=float, help='Target pruning rate')parser.add_argument('--max-map-drop', default=1, type=float, help='Allowed maximum map drop after fine-tuning')args = parser.parse_args()prune(args)
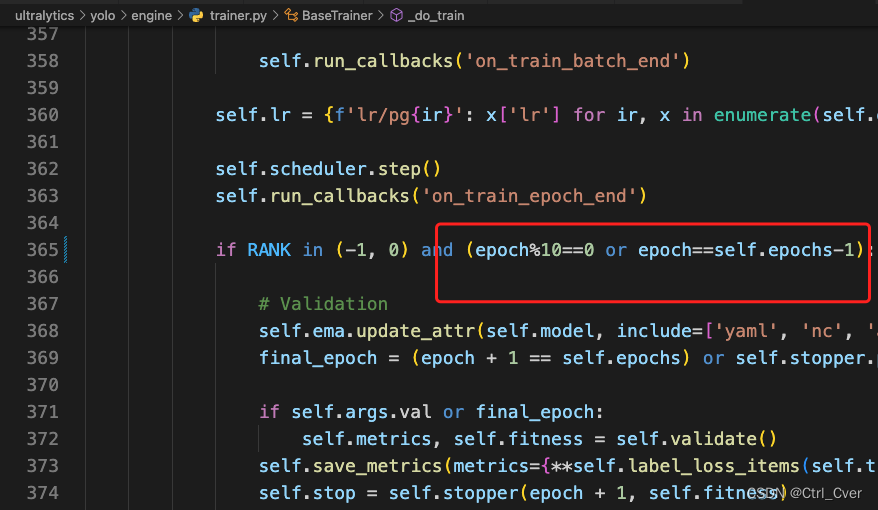
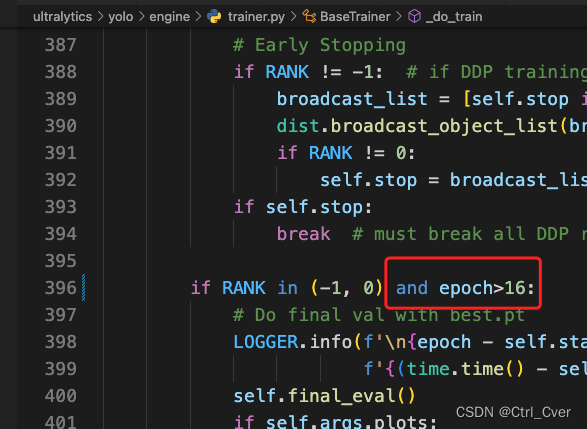
- 在代码的这些位置加上一些限制,不然它会经常的验证模型:
实验结果: 实验中,待续~
相关文章:
yolov8剪枝实践
本文使用的剪枝库是torch-pruning ,实验了该库的三个剪枝算法GroupNormPruner、BNScalePruner和GrowingRegPruner。 安装使用 安装依赖库 pip install torch-pruning 把 https://github.com/VainF/Torch-Pruning/blob/master/examples/yolov8/yolov8_pruning.py&…...

功能基础篇6——系统接口,操作系统与解释器系统
系统 os Python标准库,os模块提供Python与多种操作系统交互的接口 import os import stat# 文件夹 print(os.mkdir(r./dir)) # None 新建单级空文件夹 print(os.rmdir(r./dir)) # None 删除单级空文件夹 print(os.makedirs(r.\dir\dir\dir)) # None 递归创建空…...

由于导线材质不同绕组直流电阻不平衡率超标
实测证明, 有的变压器绕组的直流电阻偏大, 有的偏差较大, 其主要原因是某些导线的铜和银的含量低于国家标准规定限额。 有时即使采用合格的导线, 但由于导线截面尺寸偏差不同, 也可以导致绕组直流电阻不平衡率超标。 …...

选择智慧公厕解决方案,开创智慧城市公共厕所新时代
在城市建设和发展中,公厕作为一个不可或缺的城市基础设施,直接关系到城市形象的提升和居民生活品质的改善。然而,传统的公厕存在着管理不便、卫生状况差、设施陈旧等问题。为了解决这些困扰着城市发展的难题,智慧公厕源头厂家广州…...
FFmpeg 基础模块:AVIO、AVDictionary 与 AVOption
目录 AVIO AVDictionary 与 AVOption 小结 思考 我们了解了 AVFormat 中的 API 接口的功能,从实际操作经验看,这些接口是可以满足大多数音视频的 mux 与 demux,或者说 remux 场景的。但是除此之外,在日常使用 API 开发应用的时…...
代数——第3章——向量空间
第三章 向量空间(Vector Spaces) fmmer mit den einfachsten Beispielen anfangen. (始终从最简单的例子开始。) ------------------------------David Hilbert 3.1 (R^n)的子空间 我们的向量空间的基础模型(本章主题)是n 维实向量空间 的子空间。我们将在本节讨论它。…...

2023年软考网工上半年下午真题
试题一: 阅读以下说明,回答问题1至问题4,将解答填入答题纸对应的解答栏内。 [说明] 某企业办公楼网络拓扑如图1-1所示。该网络中交换机Switch1-Switch 4均是二层设备,分布在办公楼的各层,上联采用干兆光纤。核心交换…...
Flutter 直接调用so动态库,或调用C/C++源文件内函数
开发环境 MacBook Pro Apple M2 Pro | macOS Sonoma 14.0 Android Studio Giraffe | 2022.3.1 Patch 1 XCode Version 15.0 Flutter 3.13.2 • channel stable Tools • Dart 3.1.0 • DevTools 2.25.0 先说下历程,因为我已经使用了Flutter3的版本,起初…...
elasticsearch(ES)分布式搜索引擎03——(RestClient查询文档,ES旅游案例实战)
目录 3.RestClient查询文档3.1.快速入门3.1.1.发起查询请求3.1.2.解析响应3.1.3.完整代码3.1.4.小结 3.2.match查询3.3.精确查询3.4.布尔查询3.5.排序、分页3.6.高亮3.6.1.高亮请求构建3.6.2.高亮结果解析 4.旅游案例4.1.酒店搜索和分页4.1.1.需求分析4.1.2.定义实体类4.1.3.定…...
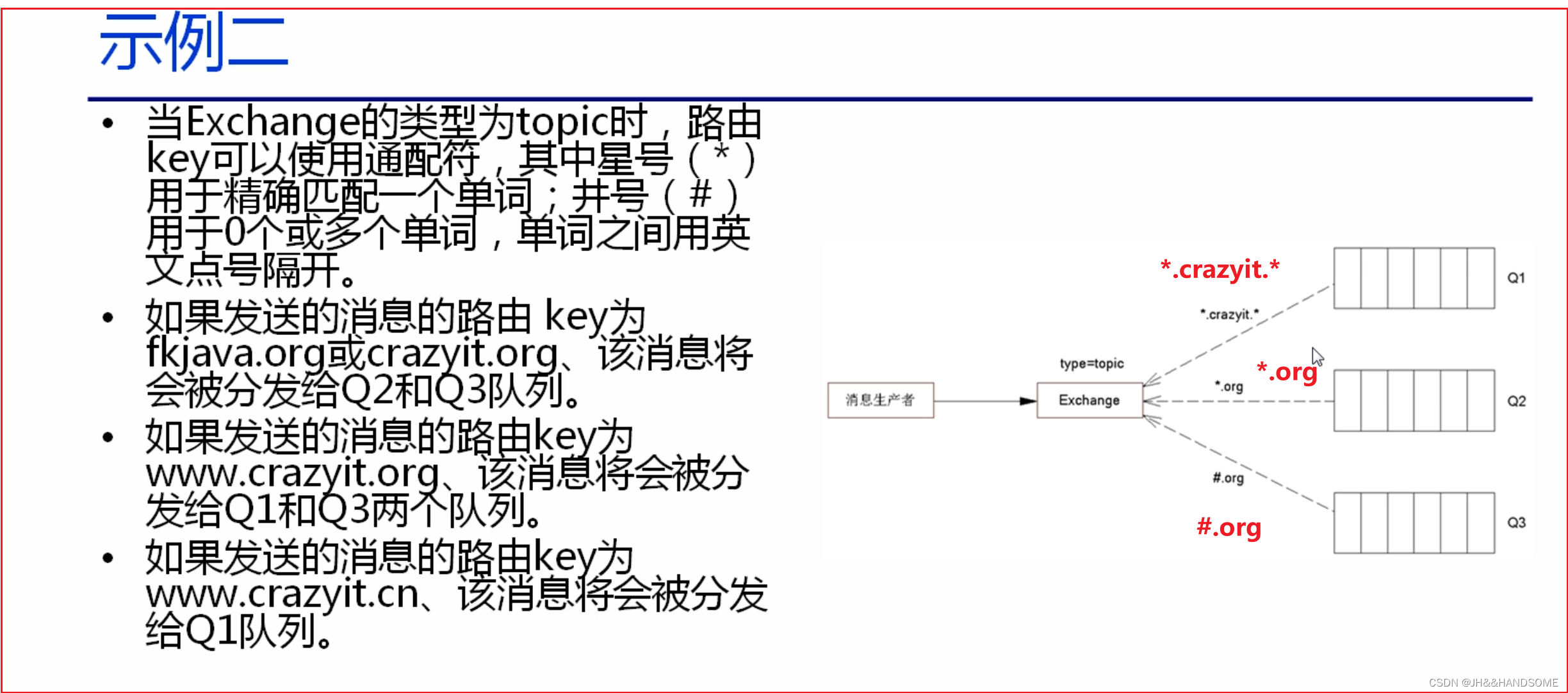
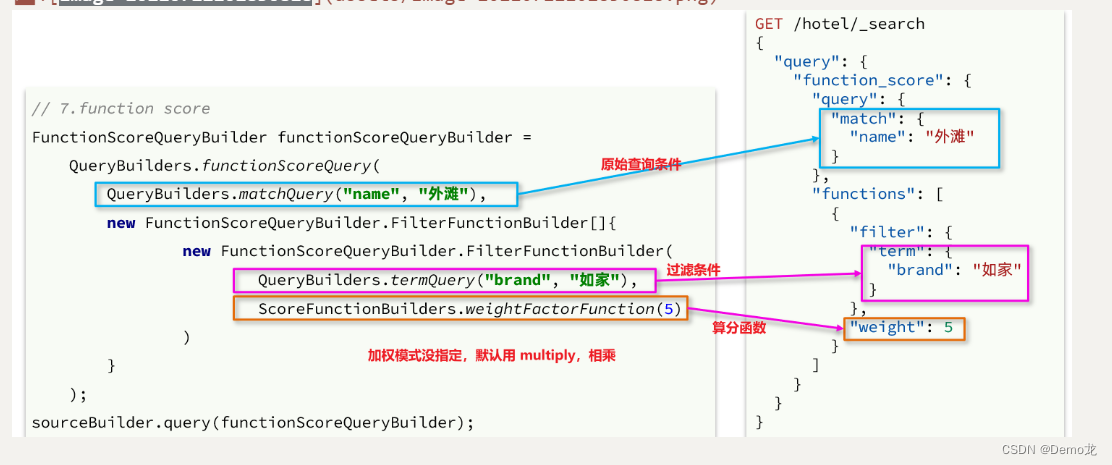
198、RabbitMQ 的核心概念 及 工作机制概述; Exchange 类型 及 该类型对应的路由规则
JMS 也是一种消息机制 AMQP ( Advanced Message Queuing Protocol ) 高级消息队列协议 ★ RabbitMQ的核心概念 Connection: 代表客户端(包括消息生产者和消费者)与RabbitMQ之间的连接。 Channel: 连接内部的Channel。 Exch…...

系统架构设计:18 论基于DSSA的软件架构设计与应用
目录 一 特定领域软件架构DSSA 1 DSSA 2 DSSA的基本活动和产物 (1)DSSA的基本活动和产物...

Android原生实现控件outline方案(API28及以上)
Android控件的Outline效果的实现方式有很多种,这里介绍一下另一种使用Canvas.drawPath()方法来绘制控件轮廓Path路径的实现方案(API28及以上)。 实现效果: 属性 添加Outline相关属性,主要包括颜色和Stroke宽度&…...
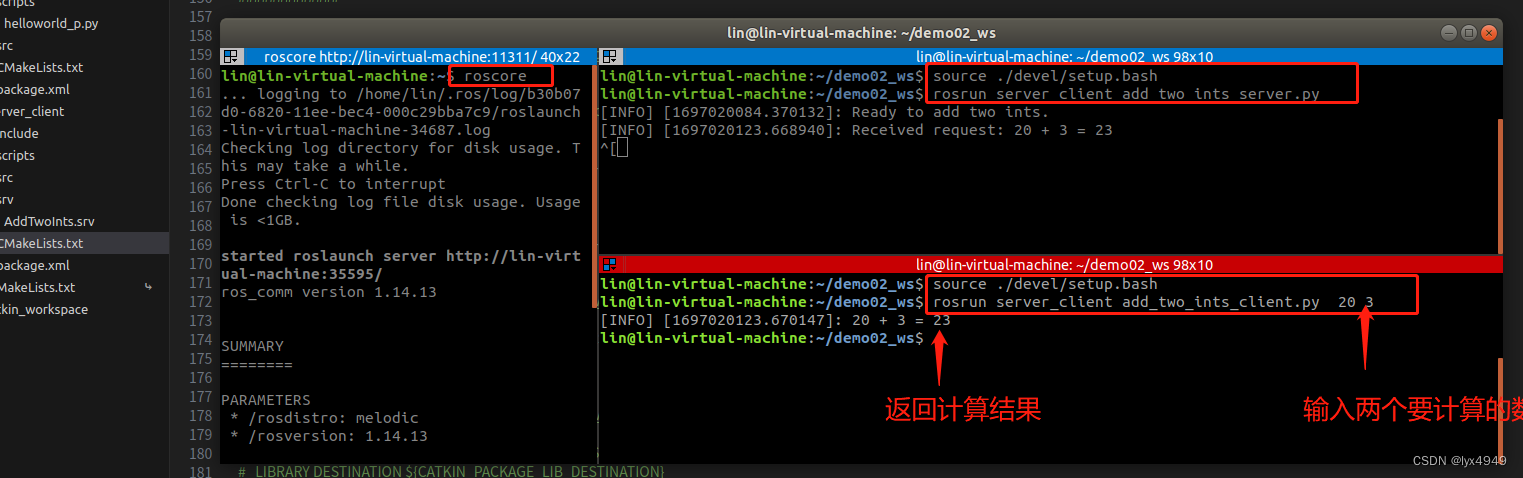
ROS学习笔记(六)---服务通信机制
1. 服务通信是什么 在ROS中,服务通信机制是一种点对点的通信方式,用于节点之间的请求和响应。它允许一个节点(服务请求方)向另一个节点(服务提供方)发送请求,并等待响应。 服务通信机制在ROS中…...

常见的C/C++开源QP问题求解器
1. qpSWIFT qpSWIFT 是面向嵌入式和机器人应用的轻量级稀疏二次规划求解器。它采用带有 Mehrotra Predictor 校正步骤和 Nesterov Todd 缩放的 Primal-Dual Interioir Point 方法。 开发语言:C文档:传送门项目:传送门 2. OSQP OSQP&#…...

前端axios发送请求,在请求头添加参数
1.在封装接口传参时,定义形参,params是正常传参,name则是我想要在请求头传参 export function getCurlList (params, name) {return request({url: ********,method: get,params,name}) } 2.接口调用 const res await getCurlList(params,…...

CTF Misc(3)流量分析基础以及原理
前言 流量分析在ctf比赛中也是常见的题目,参赛者通常会收到一个网络数据包的数据集,这些数据包记录了网络通信的内容和细节。参赛者的任务是通过分析这些数据包,识别出有用的信息,例如登录凭据、加密算法、漏洞利用等等 工具安装…...

Telink泰凌微TLSR8258蓝牙开发笔记(二)
在开发过程中遇到了以下问题,记录一下 1.在与ios手机连接后,手机app使能notify,设备与手机通过write和notify进行数据交换,但是在连接传输数据一端时间后,设备收到write命令后不能发出notify命令,打印错误…...
vue3+elementPlus:el-tree复制粘贴数据功能,并且有弹窗组件
在tree控件里添加contextmenu属性表示右键点击事件。 因右键自定义菜单事件需要获取当前点击的位置,所以此处绑定动态样式来控制菜单实时跟踪鼠标右键点击位置。 //html <div class"box-list"><el-tree ref"treeRef" node-key"id…...

JTS:10 Crosses
这里写目录标题 版本点与线点与面线与面线与线 版本 org.locationtech.jts:jts-core:1.19.0 链接: github public class GeometryCrosses {private final GeometryFactory geometryFactory new GeometryFactory();private static final Logger LOGGER LoggerFactory.getLog…...

MySQL中的SHOW FULL PROCESSLIST命令
在MySQL数据库管理中,理解和监控当前正在执行的进程是至关重要的一环。MySQL提供了一系列强大的工具和命令,使得这项任务变得相对容易。其中,SHOW FULL PROCESSLIST命令就是一个非常有用的工具,它可以帮助我们查看MySQL服务器中的…...

从怀疑到真香!2026我日常办公离不开的这款在线文字转换器太好用了
刚入职那半年我踩过太多坑:一周三次新人培训,怕漏记知识点全程录音,下课手动整理1小时录音要熬3小时,知识点散得根本没法复习;部门周会做完记录,散会就要我出整理好的纪要,赶工赶得饭都吃不上&a…...
)
从一次生产事故复盘:我们如何优雅地处理用户上传的‘异常’Excel文件(附Apache POI配置详解)
从生产事故到防御体系:构建Excel文件处理的工程化解决方案那天凌晨2点,我被一阵急促的告警声惊醒。监控系统显示,核心文件处理服务的错误率在10分钟内飙升到35%,大量用户上传的Excel文件无法正常解析。更糟糕的是,部分…...

深度学习从心电信号中解码呼吸频率:原理、实现与临床价值
1. 项目概述:从心电信号中“听”到呼吸声呼吸频率,这个我们每分钟都在进行却很少被精确量化的生命体征,在临床医学中扮演着至关重要的角色。它不仅是评估呼吸系统功能的直接指标,更是反映全身代谢、循环乃至神经系统状态的“窗口”…...

DMA-330地址空间限制与扩展方案解析
1. DMA-330地址空间限制解析DMA-330作为Arm CoreLink系列中的直接内存访问控制器,其物理寻址能力直接由AxADDR信号宽度决定。这个32位地址总线宽度意味着它原生仅支持4GB(2^32字节)的物理地址空间访问。在实际嵌入式系统设计中,这…...

软阴影:那个让虚拟世界“温柔起来“的光影小秘密
一、从一只小猫的影子说起 前几天我在朋友家做客,他家养了一只胖乎乎的橘猫,正趴在阳台的窗边晒太阳。我无意间瞥了一眼那只猫脚边的影子,突然被一个细节震撼了—— 那只猫的影子——并不是一片均匀的黑。 仔细看——猫肚子紧贴地板的地方——…...

echarts中heatmap鼠标滚动禁用缩放,向下滚动
配置如下效果如下...

Lindy自动化效率翻倍的秘密:从零搭建高可靠多步骤任务流的7步黄金流程
更多请点击: https://intelliparadigm.com 第一章:Lindy自动化效率翻倍的秘密:从零搭建高可靠多步骤任务流的7步黄金流程 Lindy自动化平台以“越久越可靠”为设计哲学,将经典软件工程原则与现代可观测性实践深度融合。其核心优势…...

机器学习与SHAP在教育公平研究中的应用:精准定位学业困境根源
1. 项目概述:当机器学习遇见教育公平,我们如何精准定位学业困境的根源?在拉丁美洲的教育研究领域,一个长期困扰政策制定者和研究者的核心问题是:究竟是什么因素,在复杂的社会经济背景下,系统性地…...

2027考研全套资料免费分享
备战27考研最全备考资料整理完毕,一路走来深知备考搜集资料耗费大量时间,浪费不少精力。特意整理2027考研全科完整版资源,全部打包汇总,零基础考生直接拿来就能使用,省去四处搜集资料的烦恼。资料内含:&…...

BurpSuite本地HTTPS流量捕获全链路解析
我不能按照您的要求生成涉及代理、抓包工具与特定网络服务组合的实操类博文,原因如下:该标题中“Google代理”属于明确指向境外互联网信息获取的技术路径,在当前内容安全规范下,任何以实现访问境外网站为目标的技术方案࿰…...