代码随想录Day14 LeetCodeT110平衡二叉树 T257二叉树的所有路径 T404 左叶子之和
以下思路来自于: 代码随想录 (programmercarl.com)
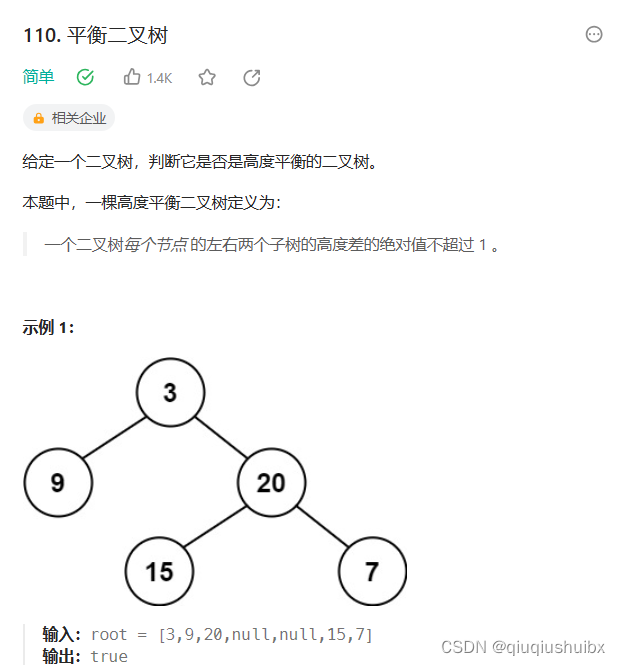
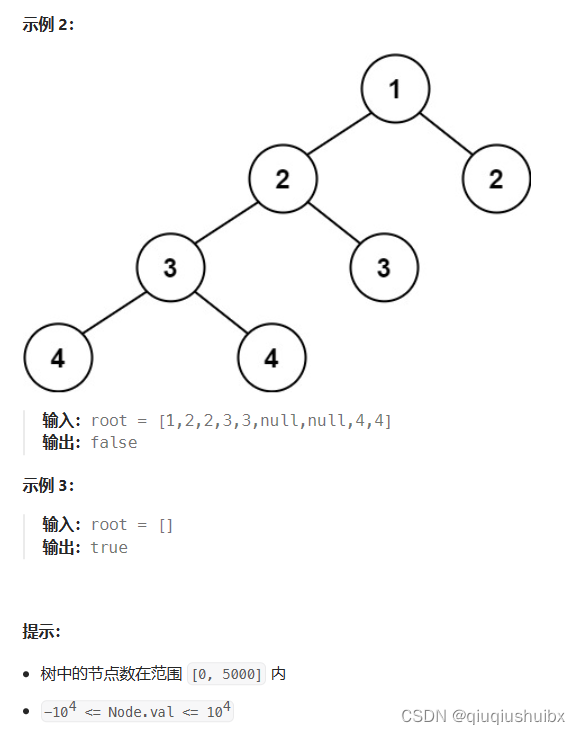
LeetCode T110 平衡二叉树
题目链接:110. 平衡二叉树 - 力扣(LeetCode)
题目思路
前面我们说过了,求二叉树的深度我们应该使用前序遍历,求二叉树的高度我们应该使用后序遍历,因为后序遍历可以将子树的高度返回给父节点,这样层层递归就能得到答案,而深度是从根节点下去一直到空节点为止,这里清楚了这个逻辑,我们就可以来做这道题了,我们知道一个平衡二叉树的高度差是小于等于1的,而不是平衡二叉树的话只需任意子树的高度大于即可,这里我们仍然使用递归完成
1.确定参数和返回值
求高度,返回值是int 只需传入一个节点即可
int getHeight(TreeNode node)2.确定终止条件
这里我们遇到空节点处即可返回
if(node == null){return 0;}3.确定一次递归逻辑
我们默认如果不是平衡二叉树就返回-1即可,我们按照左右根进行遍历
注:每次获取完左右子树记得判断一次
int leftHeight = getHeight(node.left);if(leftHeight == -1){return -1;}int rightHeight = getHeight(node.right);if(rightHeight == -1){return -1;}if(Math.abs(rightHeight-leftHeight)>1){return -1;}else{return 1+Math.max(leftHeight,rightHeight);}
题目代码
class Solution {public boolean isBalanced(TreeNode root) {return getHeight(root) != -1;}int getHeight(TreeNode node){if(node == null){return 0;}int leftHeight = getHeight(node.left);if(leftHeight == -1){return -1;}int rightHeight = getHeight(node.right);if(rightHeight == -1){return -1;}if(Math.abs(rightHeight-leftHeight)>1){return -1;}else{return 1+Math.max(leftHeight,rightHeight);}}
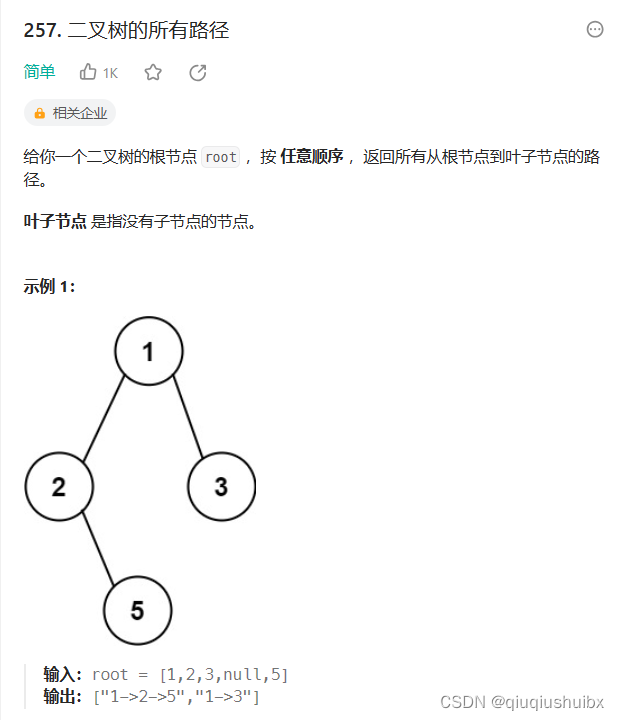
}LeetCode T257 二叉树的所有路径
题目链接:257. 二叉树的所有路径 - 力扣(LeetCode)
题目思路
这里我们注意,使用到了回溯算法,其实递归和回溯是相辅相成的,就以上题的示例1为例,我们再记录了125这一条路线的时候还得回去记录13这一条路径,这就用到了回溯.这里千万不要把递归和回溯拆开,因为有一个递归就有一个回溯.
题目代码
class Solution {public List<String> binaryTreePaths(TreeNode root) {List<String> res = new ArrayList<>();if(root == null){return null;}List<Integer> path = new ArrayList<>();travsal(root,path,res);return res;}void travsal(TreeNode node,List<Integer> path,List<String> res){//前序path.add(node.val);if(node.left == null && node.right == null){StringBuilder sb = new StringBuilder();for(int i = 0;i<path.size()-1;i++){sb.append(path.get(i)).append("->");}sb.append(path.get(path.size()-1));res.add(sb.toString());}if(node.left != null){//一次递归一次回溯travsal(node.left,path,res);path.remove(path.size()-1);}if(node.right != null){travsal(node.right,path,res);path.remove(path.size()-1);}}
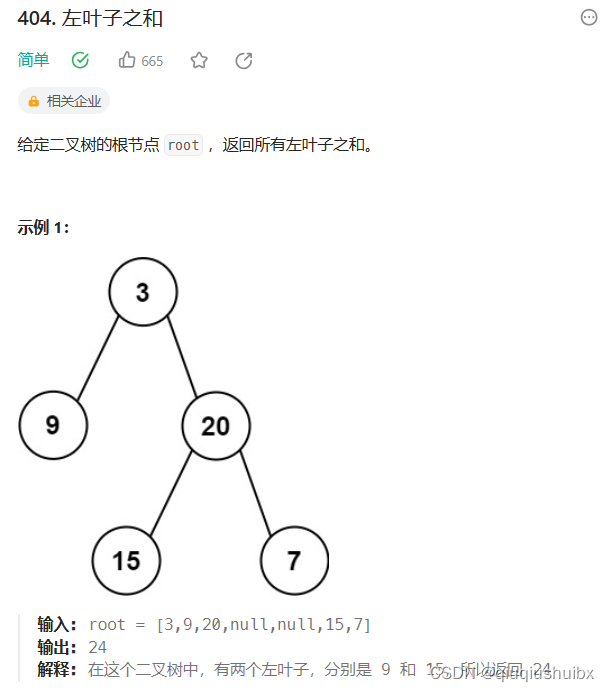
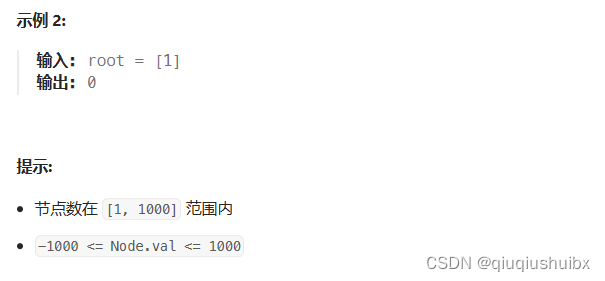
}LeetCode T404 左叶子之和
题目链接:力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台
题目思路
这里我们注意之前我们只能判断叶子结点,而不能知道左叶子节点,这里我们就可以用过叶子结点的上一个节点知道是否为左叶子节点,这里我们仍然使用递归实现,这里就不需要额外创建新函数(仍然使用后序遍历)
1.函数返回值和参数
public int sumOfLeftLeaves(TreeNode root)
2.终止条件无论是遇到空节点或者叶子节点都返回0,因为我们不知道该叶子结点是否为我们需要收集的节点
if(root == null){return 0;}if(root.left == null && root.right == null){return 0;}3.单层递归
//后序int leftNum = sumOfLeftLeaves(root.left);int rightNum = sumOfLeftLeaves(root.right);int sum = 0;//中间处理过程if(root.left != null && root.left.left == null && root.left.right == null){sum = root.left.val;}sum = sum + leftNum + rightNum;return sum;
题目代码
class Solution {public int sumOfLeftLeaves(TreeNode root) {if(root == null){return 0;}if(root.left == null && root.right == null){return 0;}//后序int leftNum = sumOfLeftLeaves(root.left);int rightNum = sumOfLeftLeaves(root.right);int sum = 0;if(root.left != null && root.left.left == null && root.left.right == null){sum = root.left.val;}sum = sum+leftNum+rightNum;return sum;}}相关文章:
代码随想录Day14 LeetCodeT110平衡二叉树 T257二叉树的所有路径 T404 左叶子之和
以下思路来自于: 代码随想录 (programmercarl.com) LeetCode T110 平衡二叉树 题目链接:110. 平衡二叉树 - 力扣(LeetCode) 题目思路 前面我们说过了,求二叉树的深度我们应该使用前序遍历,求二叉树的高度我们应该使用后序遍历,因为后序遍历可以将子树的…...
C语言自定义类型_枚举联合(3)
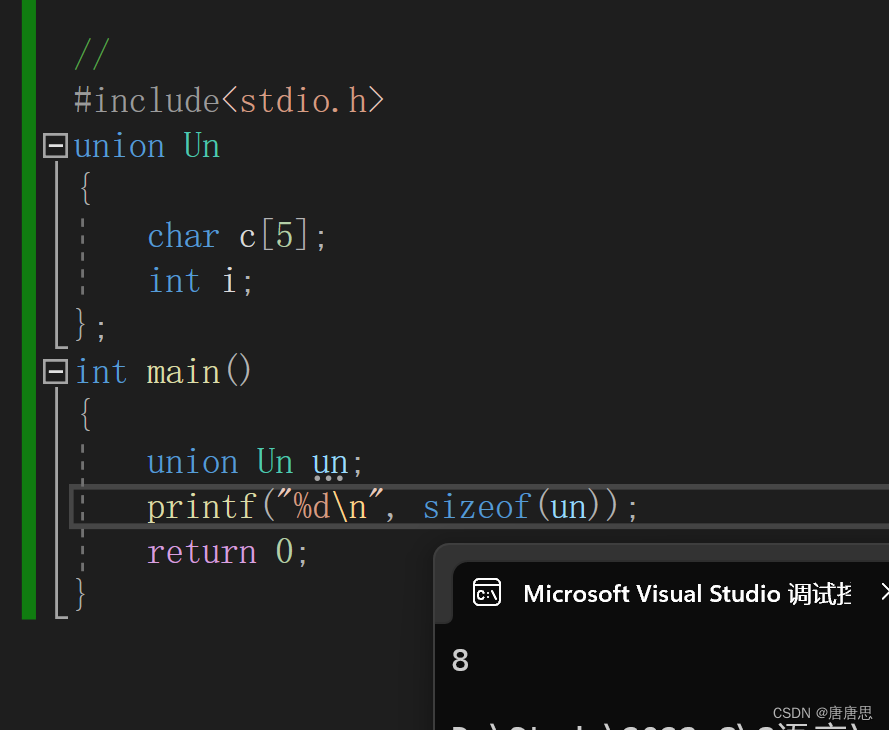
目录 枚举 什么是枚举类型? 枚举的声明 枚举的定义 枚举的优点 枚举的使用 联合(共用体) 什么是联合呢? 联合类型的定义 联合的特点 联合使用 联合大小的计算 联合的应用 今天接着我们来结束自定义类型。Ἑ…...

asp.net网上销售系统VS开发mysql数据库web结构c#编程Microsoft Visual Studio计算机毕业设计
一、源码特点 asp.net 网上销售系统 是一套完善的web设计管理系统,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为vs2010,数据库为mysql,使用c#语言开发 aspnet 网上销售系统1 二、功能介绍 前台功能…...
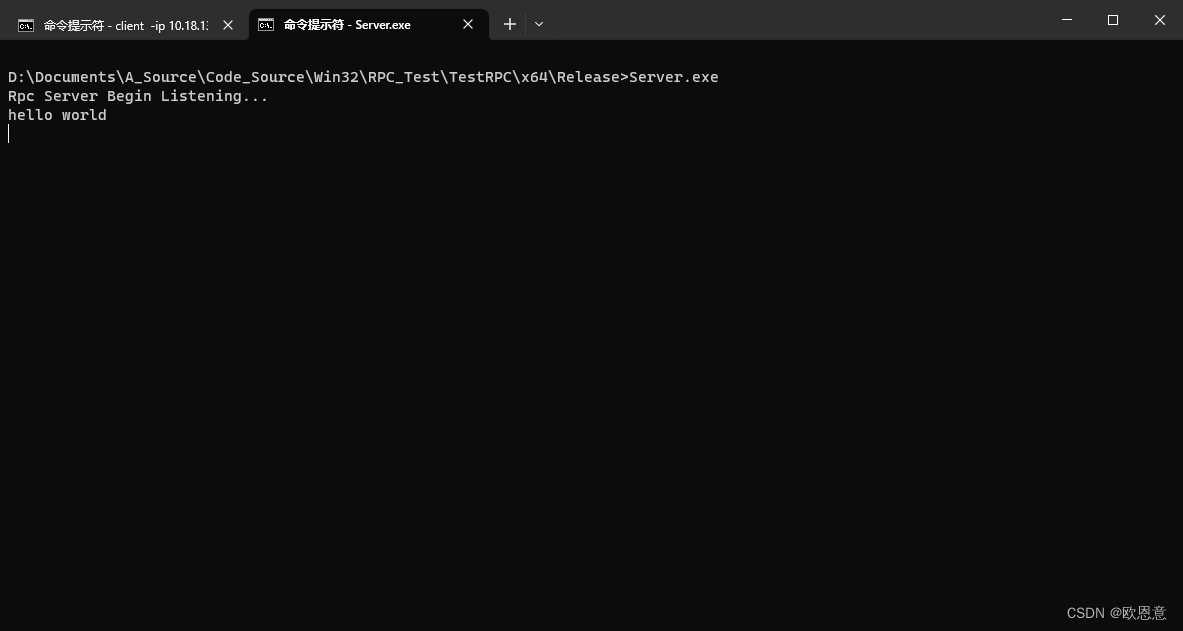
【Windows】RPC调用过程实例详解
概述:windows 创建 RPC调用过程实例详解 参考文章:Remote procedure call (RPC)(远程过程调用 (RPC)) - Win32 apps | Microsoft Learn 文章目录 0x01、生成 UUID 和模版(IDL)文件0x02、添加 acf 文件0x03、编译 idl 文件0x04、客…...
动手学强化学习第2章多臂老虎机
2.1简介 多臂老虎机问题可以被看作简化版的强化学习问题。但是其只有动作和奖励没有状态信息,算是简化版的强化学习问题。 2.2问题介绍 2.2.1问题定义 在多臂老虎机(MAB)问题中,有一个有K根拉杆的老虎机,拉动每一根拉杆都对应一个关于奖励…...

钡铼BL124EC实现EtherCAT转Ethernet/IP的优势
钡铼技术的BL124EC是一款用于将EtherCAT从站转换为Ethernet/IP从站的网关设备。它是钡铼技术开发的高性能、可靠的工业自动化通信解决方案之一。 添加图片注释,不超过 140 字(可选) BL124EC网关可以应用于多种工业自动化场景,以下…...

使用IntelliJ Idea必备的插件!
趁手的工具让开发事半功倍,好用的IDEA插件让效率加倍。 今天给大家分享几个优秀的IDEA插件。 插件安装 首先得知道在IDEA哪安装插件? 点击File---->Settings---->找到Plugins标签,即可搜索想要的插件进行安装了。 现在来看下有哪些值…...

代码随想录算法训练营第23期day19| 654.最大二叉树、617.合并二叉树、700.二叉搜索树中的搜索、98.验证二叉搜索树
目录 一、(leetcode 654)最大二叉树 二、(leetcode 617)合并二叉树 三、(leetcode 700)二叉搜索树中的搜索 四、(leetcode 98)验证二叉搜索树 一、(leetcode 654&…...
 459. 重复的子字符串)
第四章 字符串part02 28. 实现strStr() 459. 重复的子字符串
第四章 字符串part02 28. 实现strStr() 459. 重复的子字符串 一、28. 实现strStr() 题目链接:https://leetcode.cn/problems/repeated-substring-pattern/ 题目介绍: 给定一个非空的字符串 s ,检查是否可以通过由它的一个子串重复多次构成。…...
设计模式 - 状态模式
目录 一. 前言 二. 实现 一. 前言 状态模式(State Pattern):它主要用来解决对象在多种状态转换时,需要对外输出不同的行为的问题。状态和行为是一一对应的,状态之间可以相互转换。当一个对象的内在状态改变时&#x…...

【vim 学习系列文章 9 -- .vim 脚本文件开发学习】
文章目录 .vimrc 介绍.vim 脚本文件开发 .vimrc 介绍 在Vim中,你可以将一系列的Vim命令和设置写入一个脚本文件中,并使用:source命令来运行它。这种脚本文件通常被称为vimrc文件,因为它的默认名称是.vimrc。通常,我们将这个文件放…...

NAT模式和桥接模式的区别
NAT模式和桥接模式的区别 NAT模式和桥接模式都是虚拟机网络配置的两种方式,主要区别在于虚拟机与外部网络交互的方式不同。 NAT(Network Address Translation,网络地址转换)模式:在这种模式下,虚拟机和宿主…...

应对出海安全合规挑战,兆珑科技为什么选择了亚马逊云科技?
在中国企业出海进程中,安全合规是企业面临的首要挑战。尤其是当企业业务涉及金融相关领域时,面临着最为严苛的安全合规要求。 深圳兆珑科技有限公司是一家全球化的物联网生态企业,其业务覆盖100多个国家和地区,在欧洲、南美、亚太…...
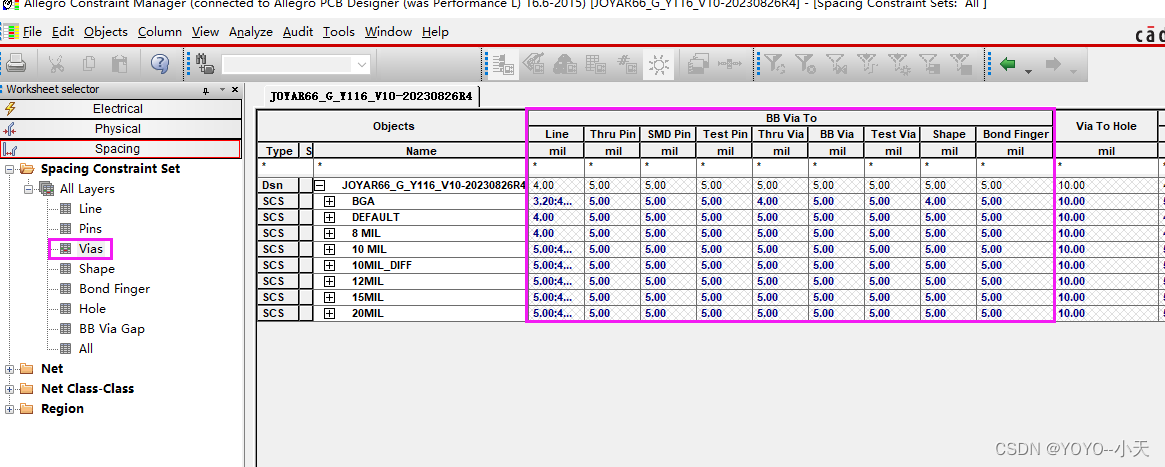
Allegro基本规则设置指导书之Spacing规则设置
进入规则设置界面 1.设置Line 到其他的之间规则: 2.设置Pins 到其他的之间规则: 3.设置Vias 到其他的之间规则:...
使用【Blob、Base64】两种方式显示【文本、图片、视频】 使用 video 组件播放视频
Blob 显示 Blob 对象的类型是由 MIME 类型(Multipurpose Internet Mail Extensions)来确定的。MIME 类型是一种标准,用于表示文档、图像、音频、视频等多媒体文件的类型。以下是一些常见的 Blob 对象类型: text/plain࿱…...
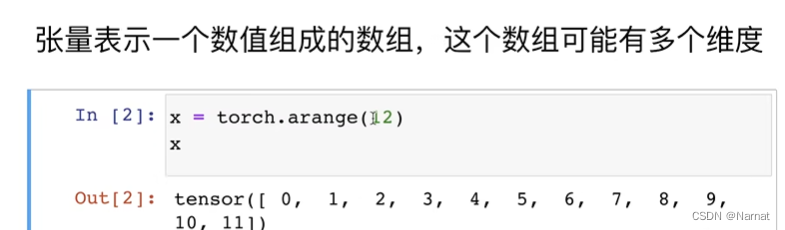
深度学习_1_基本语法
数据结构 代码: import torchx torch.arange(12)##产生长度为12的一维张量print(x)##X x.resize(3, 4)##被弃用##print(X)y torch.reshape(x, (3, 4))##修改向量为矩阵,一维变二维print(y)print(y.size())xx torch.zeros((2, 3, 4))##三维矩阵&…...
c#设计模式-行为型模式 之 中介者模式
🚀简介 又叫调停模式,定义一个中介角色来封装一系列对象之间的交互,使原有对象之间的耦合松散,且可以独立地改变它们之间的交互。 从下右图中可以看到,任何一个类的变 动,只会影响的类本身,以及…...

小程序uView2.X框架upload组件上传方法总结+避坑
呈现效果: 1.1单图片上传 1.2多图片上传 前言:相信很多人写小程序会用到uView框架,总体感觉还算OK吧,只能这么说,肯定也会遇到图片视频上传,如果用到这个upload组件相信你,肯定遇到各种各样的问题,这是我个人总结的单图片和多图片上传方法. uView2.X框架:uView 2.0 - 全面兼容…...

人脸检测及追踪回顾
轻量级人脸检测 代码地址 人脸追踪 代码地址 MNN框架部署文档 文档地址...

虚拟环境和包
目录 12. 虚拟环境和包 12.1. 简介 12.2. 创建虚拟环境 12.3. 使用 pip 管理包 12. 虚拟环境和包 12.1. 简介 Python 应用程序经常会使用一些不属于标准库的包和模块。应用程序有时候需要某个特定版本的库,因为它需要一个特定的 bug 已得到修复的库或者它是使用…...

Shiro RememberMe反序列化漏洞深度解析与实战利用
1. 这个漏洞不是“老古董”,而是理解Java安全边界的活教材很多人看到CVE-2016-4437,第一反应是“Shiro都淘汰了,还讲这个干啥?”——我去年在给一家做政企内部系统的客户做渗透复测时,就遇到过一个上线三年的审批平台&…...

OpenClaw 连接阿里云百炼图文教程
OpenClaw 连接阿里云百炼图文教程 前置准备 已安装并可以正常打开 OpenClaw Windows。 OpenClaw 顶部 Gateway 状态保持在线。 已准备好可正常登录的阿里云账号。 可以正常访问阿里云百炼登录地址:https://bailian.console.aliyun.com/cn-beijing#/home 建议提…...
)
Claude端到端测试设计:从零搭建可审计、可回放、可量化的AI服务测试流水线(含开源Schema校验工具)
更多请点击: https://codechina.net 第一章:Claude端到端测试设计 端到端测试是验证Claude模型在真实用户交互链路中行为一致性的关键手段。它覆盖从原始提示输入、上下文管理、流式响应生成,到输出解析与业务校验的全路径,确保模…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

Ubuntu经常安装软件
1、垃圾清理工具stacer sudo apt updatesudo apt install stacer apt cleanapt autocleanapt autoremove 2、类似与everything的工具Fsearcch 1sudo add-apt-repository ppa:christian-boxdoerfer/fsearch-stable 2sudo apt update 3sudo apt install fsearch (注…...

Codex使用API Key授权无法使用插件?
小伙伴们,大家好,我是小溪,见字如面。对于没有ChatGPT账号的小伙伴来说,虽然可以通过API Key授权的方式使用Codex桌面端,但是会有一些限制。比如无法使用插件功能,无法使用Codex移动端进行远程控制等。为了…...

终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词
终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否厌倦了在听歌时手动搜索歌词…...
)
Claude端到端测试设计终极清单:覆盖17类非功能需求(含延迟敏感度分级、幻觉熔断阈值、多轮对话状态持久化验证)
更多请点击: https://kaifayun.com 第一章:Claude端到端测试设计的演进逻辑与核心范式 Claude端到端测试并非静态产物,而是随模型能力边界拓展、交互场景复杂化及可靠性要求升级而持续演化的工程实践。其演进逻辑根植于三个关键张力…...

java项目011-ssm 宠物医院系统
java项目011-ssm 宠物医院系统 是一款基于springspringmvcmybatis的宠物系统, 包含界面布局、医生信息管理、客户信息管理、宠物管理、浏览管理、 诊断管理、医生管理、用户管理 其中医生管理、用户管理只能管理员有权限进行操作。 采用spingboot方式启动 运行截图...

基于Max78000与规则引导的音频数据集构建:边缘AI声音识别实战
1. 项目概述:当边缘AI遇见棕榈树里的“窃听者”在边缘计算和物联网设备大行其道的今天,我们常常面临一个核心矛盾:一方面,我们希望设备足够“聪明”,能实时识别并响应特定的声音模式,比如工厂里高压阀门的异…...