OpenCV中initUndistortRectifyMap ()函数与十四讲中去畸变公式的区别探究
文章目录
- 1.十四讲中的去畸变公式
- 2. OpenCV中的去畸变公式
- 3. 4个参数和8个参数之间的区别
- 4.initUndistortRectifyMap()函数源码
最近在使用OpenCV对鱼眼相机图像去畸变时发现一个问题,基于针孔模型去畸变时所使用的参数和之前十四讲以及视觉SLAM中的畸变系数有一点不一样。
1.十四讲中的去畸变公式
首先是十四讲或者视觉SLAM中的方法,针孔模型的畸变系数为[k1, k2, p1, p2],使用以下去畸变公式计算:

2. OpenCV中的去畸变公式
在OpenCV中可以通过initUndistortRectifyMap()函数获得原始图像和矫正图像之间的映射表,然后remap()函数根据映射表对整个图像进行映射处理实现去畸变。
cv::fisheye::initUndistortRectifyMap(K, D, cv::Mat(), K, imageSize, CV_16SC2, map1, map2);cv::remap(raw_image, undistortImg, map1, map2, cv::INTER_LINEAR, cv::BORDER_CONSTANT);
具体实现可以见文章《对鱼眼相机图像进行去畸变处理》
initUndistortRectifyMap()函数的声明如下:
void cv::initUndistortRectifyMap
( InputArray cameraMatrix, // 原相机内参矩阵InputArray distCoeffs, // 原相机畸变参数InputArray R, // 可选的修正变换矩阵 InputArray newCameraMatrix, // 新相机内参矩阵Size size, // 去畸变后图像的尺寸int m1type, // 第一个输出的映射(map1)的类型,CV_32FC1 or CV_16SC2OutputArray map1, // 第一个输出映射OutputArray map2 // 第二个输出映射
)
有意思的是,这里的相机畸变参数是可选的,可以是4个参数k1, k2, p1, p2,可以是5个参数k1, k2, p1, p2, k3,也可以是8个参数k1, k2, p1, p2, k3, k4, k5, k6。
后来检索了一下initUndistortRectifyMap()函数中的畸变公式,如下:
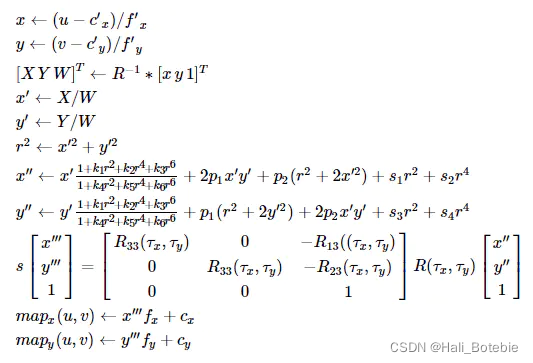
推导过程的核心是:

当k3, k4, k5, k6以及s1, s2, s3, s4均为0的时候该去畸变公式和十四讲中的公式就一样了,即十四讲中的去畸变公式是该公式的一个简略版。
3. 4个参数和8个参数之间的区别
已经说过,initUndistortRectifyMap()函数中的去畸变参数可以是4个参数k1, k2, p1, p2,可以是5个参数k1, k2, p1, p2, k3,也可以是8个参数k1, k2, p1, p2, k3, k4, k5, k6。
对于普通的广角相机图像,径向畸变和切向畸变一般都比较小,所以仅使用k1, k2, p1, p2就可以完成去畸变过程,对应十四讲中的去畸变公式。
对于鱼眼相机,一般会存在比较大的径向畸变,所以需要更高阶的径向畸变系数k3, k4, k5, k6,至于为什么是 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 1 + k 4 r 2 + k 5 r 4 + k 6 r 6 \frac{1+k_1r^2+k_2r^4+k_3r^6}{1+k_4r^2+k_5r^4+k_6r^6} 1+k4r2+k5r4+k6r61+k1r2+k2r4+k3r6这种比值形式,暂时为找到公式的设计原理,应该是基于对径向畸变的某种考量进行的设计。
根据标定工具和相机模型的不同,获取的鱼眼相机畸变系数可能有多种形式,需要知道的是都可以在OpenCV去畸变函数中使用。而且有时通过标定得到完整的8个去畸变参数k1, k2, p1, p2, k3, k4, k5, k6,这就使得在调用OpenCV函数去畸变事需要使用完整的参数,只使用k1, k2, p1, p2会得到失败的结果。
4.initUndistortRectifyMap()函数源码
void cv::initUndistortRectifyMap( InputArray _cameraMatrix, InputArray _distCoeffs,InputArray _matR, InputArray _newCameraMatrix,Size size, int m1type, OutputArray _map1, OutputArray _map2 )
{//相机内参、畸变矩阵Mat cameraMatrix = _cameraMatrix.getMat(), distCoeffs = _distCoeffs.getMat();//旋转矩阵、摄像机参数矩阵Mat matR = _matR.getMat(), newCameraMatrix = _newCameraMatrix.getMat();if( m1type <= 0 )m1type = CV_16SC2;CV_Assert( m1type == CV_16SC2 || m1type == CV_32FC1 || m1type == CV_32FC2 );_map1.create( size, m1type );Mat map1 = _map1.getMat(), map2;if( m1type != CV_32FC2 ){_map2.create( size, m1type == CV_16SC2 ? CV_16UC1 : CV_32FC1 );map2 = _map2.getMat();}else_map2.release();Mat_<double> R = Mat_<double>::eye(3, 3);//A为相机内参Mat_<double> A = Mat_<double>(cameraMatrix), Ar;//Ar 为摄像机坐标参数if( newCameraMatrix.data )Ar = Mat_<double>(newCameraMatrix);elseAr = getDefaultNewCameraMatrix( A, size, true );//R 为旋转矩阵if( matR.data )R = Mat_<double>(matR);//distCoeffs为畸变矩阵if( distCoeffs.data )distCoeffs = Mat_<double>(distCoeffs);else{distCoeffs.create(8, 1, CV_64F);distCoeffs = 0.;}CV_Assert( A.size() == Size(3,3) && A.size() == R.size() );CV_Assert( Ar.size() == Size(3,3) || Ar.size() == Size(4, 3));//摄像机坐标系第四列参数 旋转向量转为旋转矩阵Mat_<double> iR = (Ar.colRange(0,3)*R).inv(DECOMP_LU);//ir IR矩阵的指针const double* ir = &iR(0,0);//获取相机的内参 u0 v0 为主坐标点 fx fy 为焦距double u0 = A(0, 2), v0 = A(1, 2);double fx = A(0, 0), fy = A(1, 1);CV_Assert( distCoeffs.size() == Size(1, 4) || distCoeffs.size() == Size(4, 1) ||distCoeffs.size() == Size(1, 5) || distCoeffs.size() == Size(5, 1) ||distCoeffs.size() == Size(1, 8) || distCoeffs.size() == Size(8, 1));if( distCoeffs.rows != 1 && !distCoeffs.isContinuous() )distCoeffs = distCoeffs.t();//畸变参数计算double k1 = ((double*)distCoeffs.data)[0];double k2 = ((double*)distCoeffs.data)[1];double p1 = ((double*)distCoeffs.data)[2];double p2 = ((double*)distCoeffs.data)[3];double k3 = distCoeffs.cols + distCoeffs.rows - 1 >= 5 ? ((double*)distCoeffs.data)[4] : 0.;double k4 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? ((double*)distCoeffs.data)[5] : 0.;double k5 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? ((double*)distCoeffs.data)[6] : 0.;double k6 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? ((double*)distCoeffs.data)[7] : 0.;//图像高度for( int i = 0; i < size.height; i++ ){//映射矩阵map1 float* m1f = (float*)(map1.data + map1.step*i);//映射矩阵map2float* m2f = (float*)(map2.data + map2.step*i);short* m1 = (short*)m1f;ushort* m2 = (ushort*)m2f;//摄像机参数矩阵最后一列向量转换成的3*3矩阵参数double _x = i*ir[1] + ir[2];double _y = i*ir[4] + ir[5];double _w = i*ir[7] + ir[8];//图像宽度for( int j = 0; j < size.width; j++, _x += ir[0], _y += ir[3], _w += ir[6] ){//获取摄像机坐标系第四列参数double w = 1./_w, x = _x*w, y = _y*w;double x2 = x*x, y2 = y*y;double r2 = x2 + y2, _2xy = 2*x*y;double kr = (1 + ((k3*r2 + k2)*r2 + k1)*r2)/(1 + ((k6*r2 + k5)*r2 + k4)*r2);double u = fx*(x*kr + p1*_2xy + p2*(r2 + 2*x2)) + u0;double v = fy*(y*kr + p1*(r2 + 2*y2) + p2*_2xy) + v0;if( m1type == CV_16SC2 ){int iu = saturate_cast<int>(u*INTER_TAB_SIZE);int iv = saturate_cast<int>(v*INTER_TAB_SIZE);m1[j*2] = (short)(iu >> INTER_BITS);m1[j*2+1] = (short)(iv >> INTER_BITS);m2[j] = (ushort)((iv & (INTER_TAB_SIZE-1))*INTER_TAB_SIZE + (iu & (INTER_TAB_SIZE-1)));}else if( m1type == CV_32FC1 ){m1f[j] = (float)u;m2f[j] = (float)v;}else{m1f[j*2] = (float)u;m1f[j*2+1] = (float)v;}}}
}
相关文章:
OpenCV中initUndistortRectifyMap ()函数与十四讲中去畸变公式的区别探究
文章目录 1.十四讲中的去畸变公式2. OpenCV中的去畸变公式3. 4个参数和8个参数之间的区别4.initUndistortRectifyMap()函数源码 最近在使用OpenCV对鱼眼相机图像去畸变时发现一个问题,基于针孔模型去畸变时所使用的参数和之前十四讲以及视觉SLAM中的畸变系数有一点不…...

【C++】C++11——智能指针、内存泄漏、智能指针的使用和原理、RAII、auto_ptr、unique_ptr、shared_ptr、weak_ptr
文章目录 C117.智能指针7.1内存泄漏7.2智能指针的概念7.3智能指针的使用7.3.1 auto_ptr7.3.2 unique_ptr7.3.3 shared_ptr7.3.4 weak_ptr C11 7.智能指针 7.1内存泄漏 什么是内存泄漏: 内存泄漏指因为疏忽或错误造成程序未能释放已经不再使用的内存的情况。内存泄漏…...

EDUSRC-记某擎未授权与sql注入
目录 360天擎 - 未授权与sql注入 信息收集 FOFA语法 鹰图搜索 360天擎未授权访问 - 数据库信息泄露 漏洞复现 修复方案 360天擎终端安全管理系统ccid处SQL注入 漏洞复现 手动测试方法 修复方案 360天擎 - 未授权与sql注入 通常访问的页面如下,存在登录框…...

1688拍立淘API接口分享
拍立淘接口,顾名思义,就是通过图片搜索到相关商品列表。通过此接口,可以实现图片搜索爆款商品等功能。 接口地址:1688.item_search_img 公共参数 名称类型必须描述keyString是调用key(必须以GET方式拼接在URL中&…...

昇腾910使用记录
一. 压缩文件和解压文件 1. 压缩文件 tar -czvf UNITE-main.tar.gz ./UNITE-main/2. 解压文件 tar -xvf ./UNITE-main/二. CUDA更改为NPU data[label] data[label].cuda() data[instance] data[instance].cuda() data[image] data[image].cuda()更改为 data[label] da…...
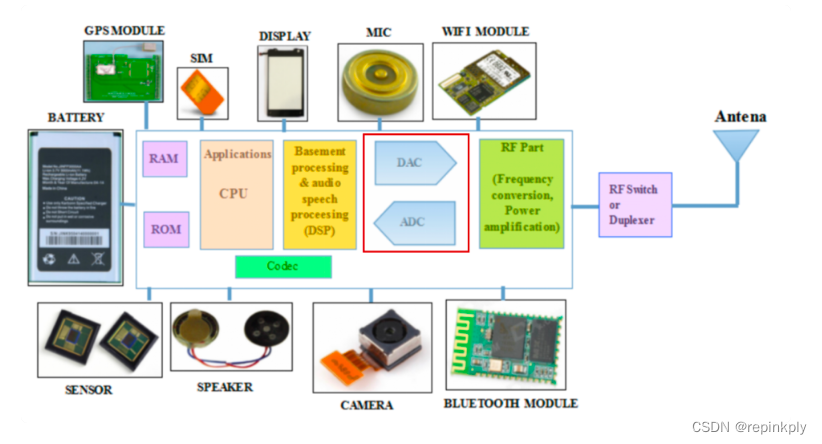
从一部iPhone手机看芯片的分类
目录 问题 iPhone X 手机处理器:A11 iPhone X 的两大存储芯片 数字 IC CPU:计算设备的运算核心和控制核心 GPU:图形处理器 ASIC:为解决特定应用问题而定制设计的集成电路 存储芯片:DRAM 和 NAND Flash iPhone…...

arm day 7
完成字符串收发函数的封装并且验证现象,一个字符串发送接受后会有‘\n’ \r src/uart.c #include"uart.h"void uart4_init() {//设置UART4的RCc时钟使能//RCC_MP_APB1ENSETR[16]->1RCC->MP_APB1ENSETR | (0x1<<16);//设置GPIOB和GPIOG的时钟…...

Java基础面试-面向对象
什么是面向对象? 对比面向过程,是两种不同的处理问题角度 面向过程更注重事情的每一个步骤及顺序,面向对象更注重事情有哪些参与者(对象),及各自需要做什么 比如洗衣机洗衣服 面向过程会将任务拆解成一系…...

GCC vs. G++:C 与 C++ 编译器的差异和比较
本文将介绍 GCC(GNU Compiler Collection)和 G 编译器的区别,并对它们在 C 和 C 程序开发中的特性和用法进行比较和总结。 引言 在 C 和 C 程序开发中,选择合适的编译器是至关重要的。GCC(GNU Compiler Collection&a…...

MAC m系列docker login报错
错误:ERROR: failed to solve: XXX error getting credentials - err: exit status 1, out: 解决: vi ~/.docker/config.jsonzsxzsx [15时55分55秒] [~] { {"auths": {"harbor-g42c.corp.matrx.team": {"auth": "…...

Redis通用指令和五大基本数据类型常用指令总结
通用指令 keys parttern 查询key (parttern即通配符,不是正则表达式,例如 keys a? 匹配以a开头的长度为2的key) del key 删除key exists key 获取key是否存在 type key 获取key的类型 expire key seconds 为指定key设置有效期,单位秒 …...

uCharts常用图表组件demo
带渐变阴影的曲线图 <view class"charts-box"><qiun-data-charts type"area" :opts"opts" :chartData"chartData" :ontouch"true":background"rgba(256,256,256,0)" /> </view>data(){return{…...
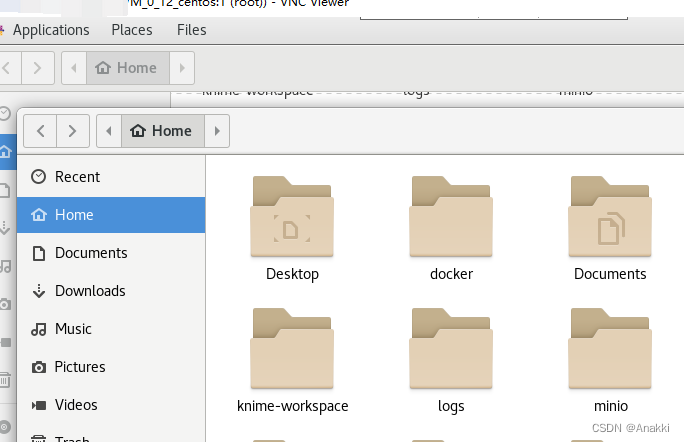
VNC:Timed out waiting for a response from the computer
VNC的服务端使用的是TigerVNC,客户端使用的是RealVNC TigerVNC按其他博客配好后,防火墙ip什么的都配了,vnc客户端怎么连都是超时。 这里建议大家可以尝试一下重启服务器。我的是CentOS的 shutdown -r now 配了2天,最后服务器重启…...

Kotlin 协程 知识点
Android 上的 Kotlin 协程 | Android Developers (google.cn) 官方网址 1.什么是协程? 我觉得协程就是kotlin中一种优雅的实现异步请求 协程(Coroutines)是一种轻量级的并发编程概念,旨在简化异步编程和并发任务的处理。它是…...

简单大方的自我介绍 PPT 格式
自我介绍是展示自己的机会,同时也是展现自信和魅力的重要时刻。通过简单大方的PPT格式,可以更好地展示自己的个性和才华。下面是一些建议,帮助你在自我介绍中展现自信和魅力。 1. 打造简洁而有吸引力的PPT布局: - 选择简洁大方的背…...
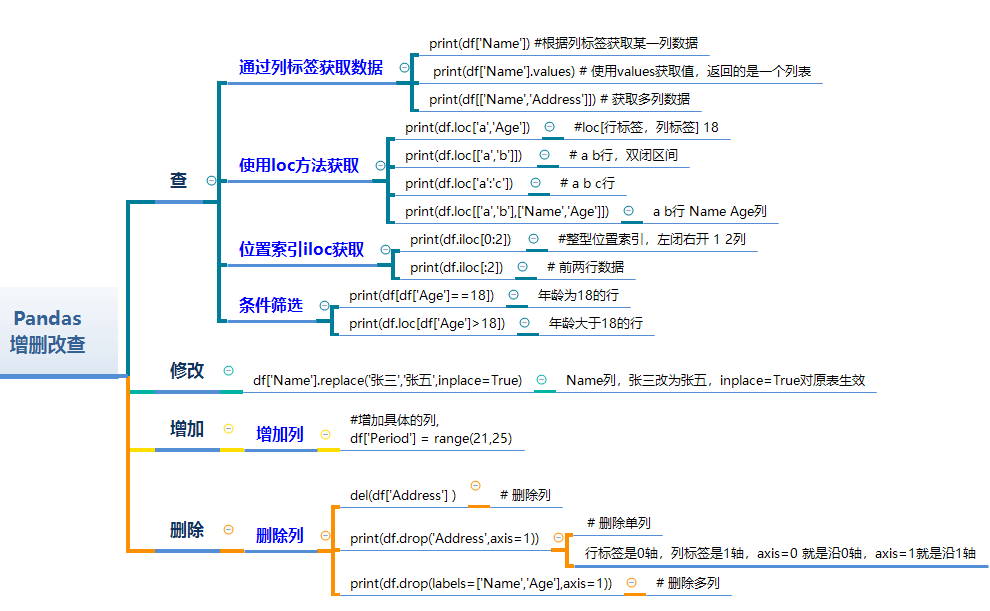
panads操作excel
panads简介 pandas是基于Numpy创建的Python包,内置了大量标准函数,能够高效地解决数据分析数据处理和分析任务,pandas支持多种文件的操作,比如Excel,csv,json,txt 文件等,读取文件之…...

【MySQL】联合查询、子查询、合并查询
这里提供了三个表: 表1: mysql> select * from class; -------------- | id | name | -------------- | 1 | 一班 | | 2 | 二班 | | 3 | 三班 | -------------- 3 rows in set (0.01 sec) 表2: mysql> select * fro…...

小程序中如何设置所服务地区的时区
在全球化的背景下,小程序除了在中国使用外,还为海外的华人地区提供服务。例如我们采云小程序为泰国、阿根廷、缅甸等国家的商家就提供过微信小程序。这些商家开通小程序,为本地的华人提供服务。但通常小程序的开发者/服务商位于中国ÿ…...

Linux环境安装mysql8.0
1个人习惯我喜欢给软件安装在/use/local下,我使用的finalshell软件,直接手动新建一个文件夹名字为mysql 2下载mysql wget https://dev.mysql.com/get/Downloads/MySQL-8.0/mysql-8.0.20-linux-glibc2.12-x86_64.tar.xz 3解压文件 tar -xvf mysql-8.0.2…...

STM32_DMA_多通道采集ADC出现错位现象
STM32_DMA_多通道采集ADC出现错位现象 问题描述: adcSensorValue[0],adcSensorValue[3],adcSensorValue[6]… //存储通道1数据 adcSensorValue[1],adcSensorValue[4],adcSensorValue[7]… //存储通道2数据 adcSensorValue[2],adcSensorValue[5],adcSensorValue[8]……...

InoDriverShop参数设置避坑指南:如何避免伺服系统调试中的常见错误
InoDriverShop参数设置避坑指南:如何避免伺服系统调试中的常见错误 伺服系统调试是工业自动化领域中的关键环节,而InoDriverShop作为一款功能强大的伺服驱动配置工具,其参数设置的准确性直接影响到设备的运行性能。本文将深入剖析新手工程师…...

当00后测试员给CEO系统提了487个缺陷后
在软件测试领域,一个年轻测试员的行动往往能引发行业深思。故事始于一家科技公司新上线的“CEO决策支持系统”——一个旨在为高管提供实时数据分析和战略建议的核心平台。项目团队信心满满地推进上线,却未料到一位00后测试员小陈的介入,彻底改…...

从原理到实践:深入理解Shellcode免杀技术及其对抗策略
Shellcode免杀技术的深度解析与对抗策略演进 在网络安全攻防对抗的永恒博弈中,Shellcode免杀技术始终占据着特殊地位。不同于传统的恶意软件检测规避,Shellcode免杀更注重代码层面的"隐形"能力,其核心在于让关键载荷在内存中执行时…...

CLIP-GmP-ViT-L-14算力适配:自动检测CUDA版本并加载对应优化内核
CLIP-GmP-ViT-L-14算力适配:自动检测CUDA版本并加载对应优化内核 1. 引言:当高性能模型遇见复杂环境 如果你部署过AI模型,大概率遇到过这样的场景:好不容易把模型跑起来了,却发现速度慢得让人抓狂,或者干…...

DBShadow横空出世,Dapper.net的天花板盖不住了
一、DBShadow是什么DBShadow是.net开源的高性能ORMDBShadow使用开源项目ShadowSql高效拼接sqlDBShadow使用开源项目PocoEmit.Mapper高效映射查询参数和查询结果也就是说SqlBuilder(ShadowSql)OOM(PocoEmit.Mapper)ORM(DBShadow)二、DBShadow和Dapper对比一下1. Dapper代码await…...
)
手把手教你用Python+Folium搭建离线地图应用(附高德瓦片下载技巧)
PythonFolium离线地图开发实战:从瓦片下载到内网部署全指南 当你在偏远山区进行地质勘探时,突然发现手机信号全无,而团队急需查看预设路线上的地形数据;或者在企业内网环境中,安全策略禁止访问外部地图服务,…...

AI辅助开发:利用快马构建openclaw强化学习抓取训练环境
最近在研究机械爪的抓取策略优化,发现手动调参效率太低,于是尝试用AI辅助开发来构建一个强化学习训练环境。这个项目主要围绕openclaw机械爪的启动和控制策略展开,通过快马平台的AI能力快速搭建实验环境,效果出乎意料地好。 环境搭…...

Thanos.sh安全使用手册:避免数据灾难的10个终极技巧
Thanos.sh安全使用手册:避免数据灾难的10个终极技巧 【免费下载链接】Thanos.sh if you are Thanos(root), this command could delete half your files randomly 项目地址: https://gitcode.com/gh_mirrors/th/Thanos.sh Thanos.sh是一款以"随机删除一…...

Omni-Vision Sanctuary 开发环境搭建:基于 Ubuntu 与 Anaconda 的完整配置流程
Omni-Vision Sanctuary 开发环境搭建:基于 Ubuntu 与 Anaconda 的完整配置流程 1. 引言 如果你是一名计算机视觉研究者或开发者,想要在本地搭建Omni-Vision Sanctuary模型的开发环境,这篇文章将为你提供一份详细的Ubuntu系统配置指南。我们…...

利用快马AI快速原型化一个Python Socket聊天室应用
最近在学习计算机网络相关的知识,发现Socket编程是个很有意思的实践方向。正好在InsCode(快马)平台上尝试用AI快速原型化了一个Python Socket聊天室应用,整个过程比想象中顺利很多,分享下我的实现思路和体验。 项目背景与需求分析 这个聊天…...