相机噪声评估
当拥有一个相机,并且写了一个降噪的算法,想要测试降噪的应用效果。
相机在光线不足的情况下产生噪点的原因主要与以下几个因素有关:
感光元件的工作原理:相机的图像传感器是由数百万甚至数千万的感光元件(如CMOS或CCD中的像素)组成的。每一个感光元件都试图捕获进入相机的光。但是,光子的到达是随机的,当光线很弱时,这种随机性更为明显,导致不同感光元件记录的光子数存在较大的差异,从而引发噪点。
ISO的增加:为了在光线不足的环境中获得更亮的图像,相机会增加其ISO值,这实际上是增加了图像传感器的增益。但增加增益的同时,传感器的噪声也会增加,导致图像中出现更多的噪点。
热噪声:当相机工作时,传感器会产生热量。特别是在长时间曝光或高ISO值的情况下,这种热量会增加。传感器的温度越高,产生的热噪声就越明显,这也会在图像中引入噪点。
电路噪声:除了热噪声外,相机内部的电路(如模拟数字转换器)也会引入一定的噪声,特别是在低光照条件下。
信号与噪声比(SNR):在光线充足的环境中,感光元件接收到的光子数(信号)相对于噪声来说是较大的,因此SNR较高,图像质量较好。但在光线不足的环境中,感光元件接收到的光子数减少,而噪声并不显著减少,导致SNR降低,噪点变得更为明显。
无所谓因素,反正有噪声了。
测试设计
目测法:光线充足时肉眼很难发现噪声,而光线比较暗是噪声明显,得出相机光线差时工作效果不理想的结论。
量化噪声:
使用相机拍摄一块纯色色卡,观察噪声情况。
期望:
相机拍出的画面数值保持一致表明没有噪声。(纯黑看不见除外)
相机拍出的画面数值与画面均值比较有一些波动表明有噪声存在。
量化波动情况即量化噪声情况。
色卡

由于色卡不是纯色,所以需要通过一些操作找到纯色部分进行裁剪,再进行评估噪声。
代码使用ipynb 来测试。
裁剪代码:
# 导入一些不知道干什么的依赖库import cv2
import numpy as np
import matplotlib.pyplot as plt
from sklearn.cluster import KMeansimport cv2
import numpy as np
import matplotlib.pyplot as plt# 输入图像路径
path1 = input("Enter path to the first image: ")
path2 = input("Enter path to the second image: ")# 打开图片
image1 = cv2.imread(path1)
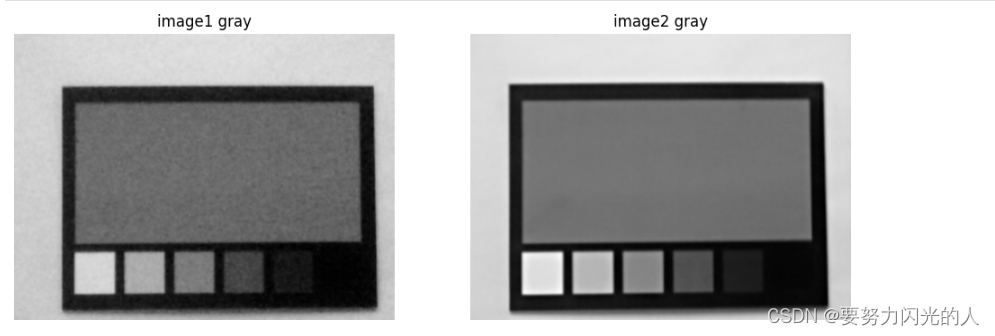
image2 = cv2.imread(path2)image1_gray = cv2.cvtColor(image1, cv2.COLOR_BGR2GRAY)
image2_gray = cv2.cvtColor(image2, cv2.COLOR_BGR2GRAY)# 使用 matplotlib 展示结果
fig, ax = plt.subplots(1, 2, figsize=(12, 6))
ax[0].imshow(cv2.cvtColor(image1_gray, cv2.COLOR_BGR2RGB))
ax[0].set_title("image1 gray")
ax[0].axis('off')
ax[1].imshow(cv2.cvtColor(image2_gray, cv2.COLOR_BGR2RGB))
ax[1].set_title("image2 gray")
ax[1].axis('off')
plt.show()
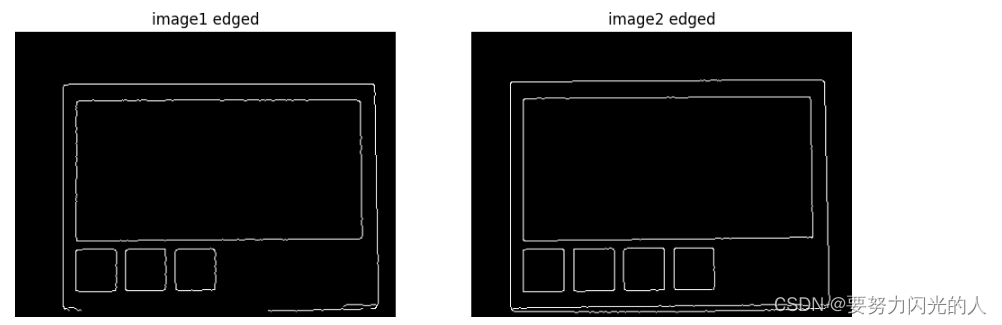
边缘检测,找到最大的色块边界,边缘不连贯就加点滤波
# 使用 Canny 边缘检测
blurred = cv2.GaussianBlur(image1_gray, (5, 5), 0)
image1_edged = cv2.Canny(blurred, 100, 200)
image2_edged = cv2.Canny(image2_gray, 100, 200)# 使用 matplotlib 展示结果
fig, ax = plt.subplots(1, 2, figsize=(12, 6))
ax[0].imshow(cv2.cvtColor(image1_edged, cv2.COLOR_BGR2RGB))
ax[0].set_title("image1 edged")
ax[0].axis('off')
ax[1].imshow(cv2.cvtColor(image2_edged, cv2.COLOR_BGR2RGB))
ax[1].set_title("image2 edged")
ax[1].axis('off')
plt.show()
边缘检测后 截取最大的纯色范围
# 寻找边缘检测后的图像中的轮廓
def find_contours(image, edged):# 寻找边缘检测后的图像中的轮廓contours, _ = cv2.findContours(edged, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 假设色板是最大的轮廓max_contour = max(contours, key=cv2.contourArea)x, y, w, h = cv2.boundingRect(max_contour)# 提取色板palette = image[y+10:y+h-10, x+10:x+w-10]return palette# 对两张图像分别提取色板
palette_image1 = find_contours(image1_gray, image1_edged)
palette_image2 = find_contours(image2_gray, image2_edged)
# 使用 matplotlib 展示结果
fig, ax = plt.subplots(1, 2, figsize=(12, 6))
ax[0].imshow(cv2.cvtColor(palette_image1, cv2.COLOR_BGR2RGB))
ax[0].set_title("Palette from Image 1")
ax[0].axis('off')
ax[1].imshow(cv2.cvtColor(palette_image2, cv2.COLOR_BGR2RGB))
ax[1].set_title("Palette from Image 2")
ax[1].axis('off')
plt.show()
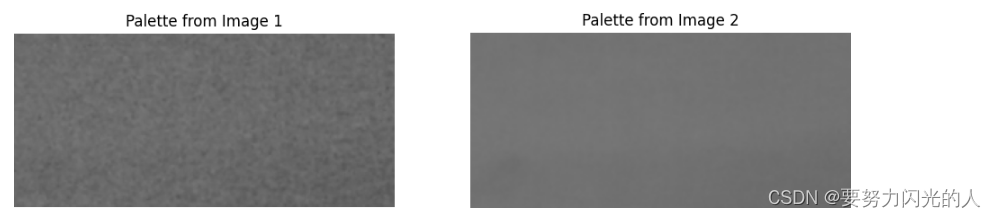
到这里就截取出来可以评估的部分了
干正事吧
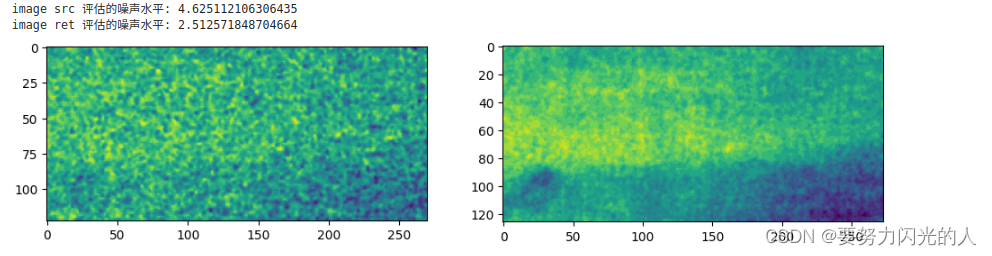
评估噪声
mean1 = np.mean(palette_image1)
mean2 = np.mean(palette_image2)median1 = np.median(palette_image1)
median2 = np.median(palette_image2)std1 = np.std(palette_image1, ddof=1)
std2 = np.std(palette_image2, ddof=1)print(f"image src 评估的噪声水平: {std1}")
print(f"image ret 评估的噪声水平: {std2}")fig, ax = plt.subplots(1, 2, figsize=(12, 6))
ax[0].imshow(palette_image1-mean1)
ax[1].imshow(palette_image2-mean2)
plt.show()
相关文章:
相机噪声评估
当拥有一个相机,并且写了一个降噪的算法,想要测试降噪的应用效果。 相机在光线不足的情况下产生噪点的原因主要与以下几个因素有关: 感光元件的工作原理:相机的图像传感器是由数百万甚至数千万的感光元件(如CMOS或CC…...

CRM系统:快速实现外勤出差人员远程访问企业提升工作效率!
🎬 鸽芷咕:个人主页 🔥 个人专栏:《速学数据结构》 《C语言进阶篇》 ⛺️生活的理想,就是为了理想的生活! 文章目录 快速实现外勤出差人员远程访问企业CRM系统前言1. 无需公网IP,高效低成本实现CRM系统远程访问1.1 下…...

028.Python面向对象_类补充_元类
我 的 个 人 主 页:👉👉 失心疯的个人主页 👈👈 入 门 教 程 推 荐 :👉👉 Python零基础入门教程合集 👈👈 虚 拟 环 境 搭 建 :👉&…...

cocos2d-x Android原生平台与Lua交互
版本: cocos2d-x 语言: C/Java/Lua 简介 cocos2d-x原生平台Android 接入第三方SDK, 需要了解LuaJavaBridge的使用。 它封装了用于Java和Lua的相互调用, 其调用通过C为中介,简要的流程: Lua调用Java: Lua -> C -> Java J…...

17个开源的Go语言博客和CMS解决方案
Go语言,也称为Golang,是一种为构建高效、可靠和可扩展软件而设计的开源编程语言。它于2007年在Google开发,现在广泛用于开发Web应用程序、网络工具和系统软件。 为什么使用基于Go的CMS解决方案? 这些优势使Go成为开发可扩展、高…...
Jenkins 执行远程shell脚本部署jar文件问题起不来
如图:最开始的时候没有加: source /etc/profile 这一行, run.sh里面的java -jar xxxx.jar 一直执行不来。 一开始以为是Jenkins执行退出后会kill一切它启动的进程,所以加了在run.sh里面加了export BUILD_IDdontKillMe࿰…...

CTF网络安全题目个人导航【持续更新】
CTF-WEB导航 WEBSQLRCE反序列化文件上传SSTIXXE综合 WEB SQL [SWPUCTF 2021 新生赛]sql - 联合注入 [SWPUCTF 2021 新生赛]easy_sql - 联合注入||报错注入||sqlmap [NSSRound#1 Basic]sql_by_sql - 二次注入布尔盲注||sqlmap [NISACTF 2022]join-us - 报错注入&无列名注入…...
Matlab导入log(或txt)文件,提取数据或其他信息
导入log(或txt)文件 先上代码: clc; clear; %数据导入 file1fullfile(文件路径, test1.log); % 导入文件test1.log f1fopen(file1); dt1textscan(f1,%s); %采用textscan 读取数据 %得到的dt1是元胞数组格式比如:有如下内容文件 导入…...
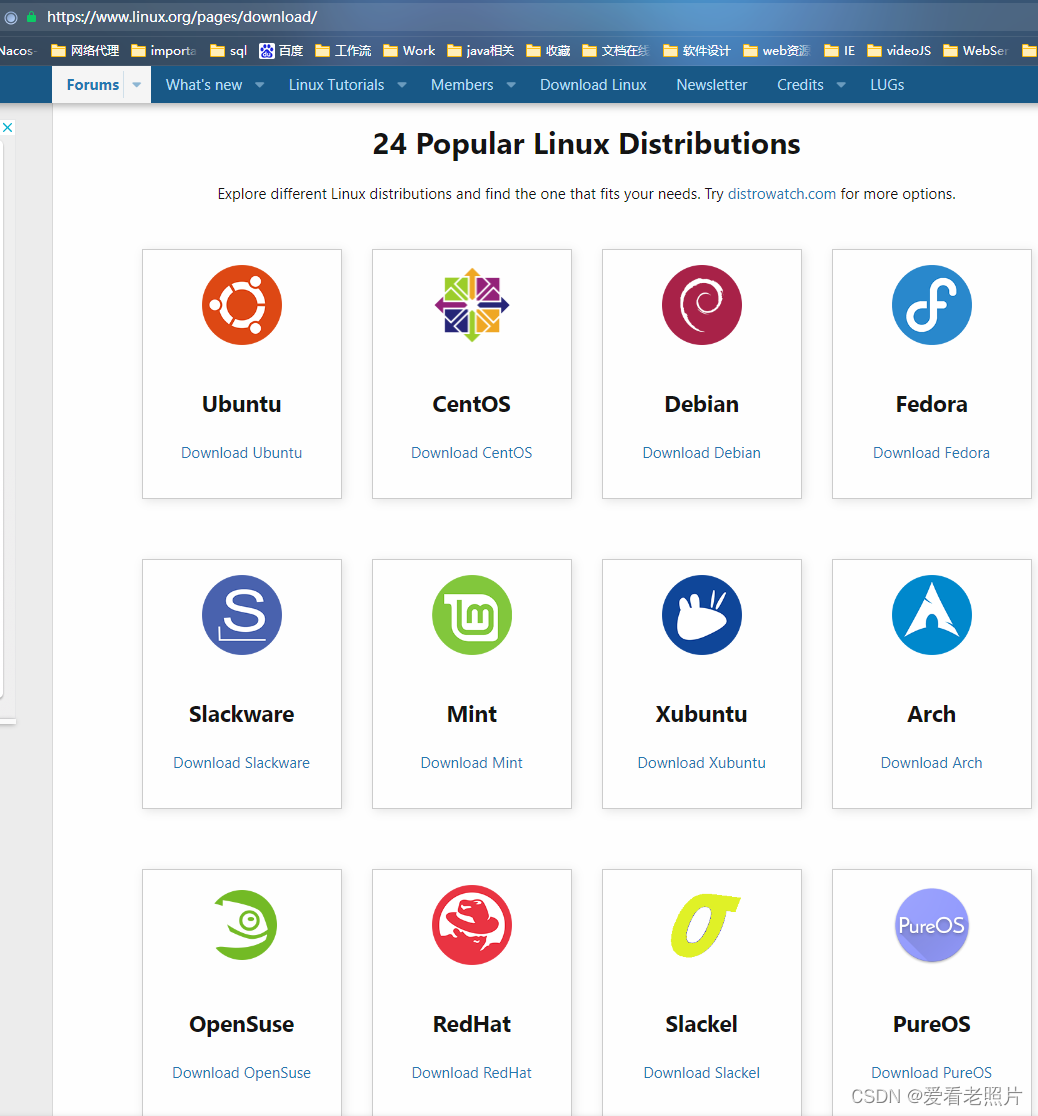
GNU和Linux的关系、 Linux的发行版本、CentOs和RedHat的区别
GNU和Linux的关系 其实,我们通常称之为的"Linux"系统,相对更准确的名称应该称为“GNU/Linux”系统! 一个功能完全的操作系统需要许多不同的组成部分,其中就包括内核及其他组件;而在GNU/Linux系统中的内核就…...

如何在STM32中实现TCP通信?
如何在STM32中实现TCP通信? TCP通信在计算机网络中扮演着重要角色,实现它需要兼顾硬件和软件因素。 硬件层面,某些STM32处理器内置了Ethernet MAC,这有利于简化网络通信的部署。若处理器缺乏内置MAC,需外接以太网控制…...
Docker安装、启动、管理ElasticSearch、ElasticSearch-heade、kibana
一、ElasticSearch 1.1.镜像拉取 docker pull elasticsearch:7.17.13 1.2.启动 docker run -d --name "容器名称" -e "ES_JAVA_OPTS-Xms512m -Xmx512m" -p 9200:9200 -p 9300:9300 elasticsearch:7.17.13启动后使用docker logs查看ES启动日志…...
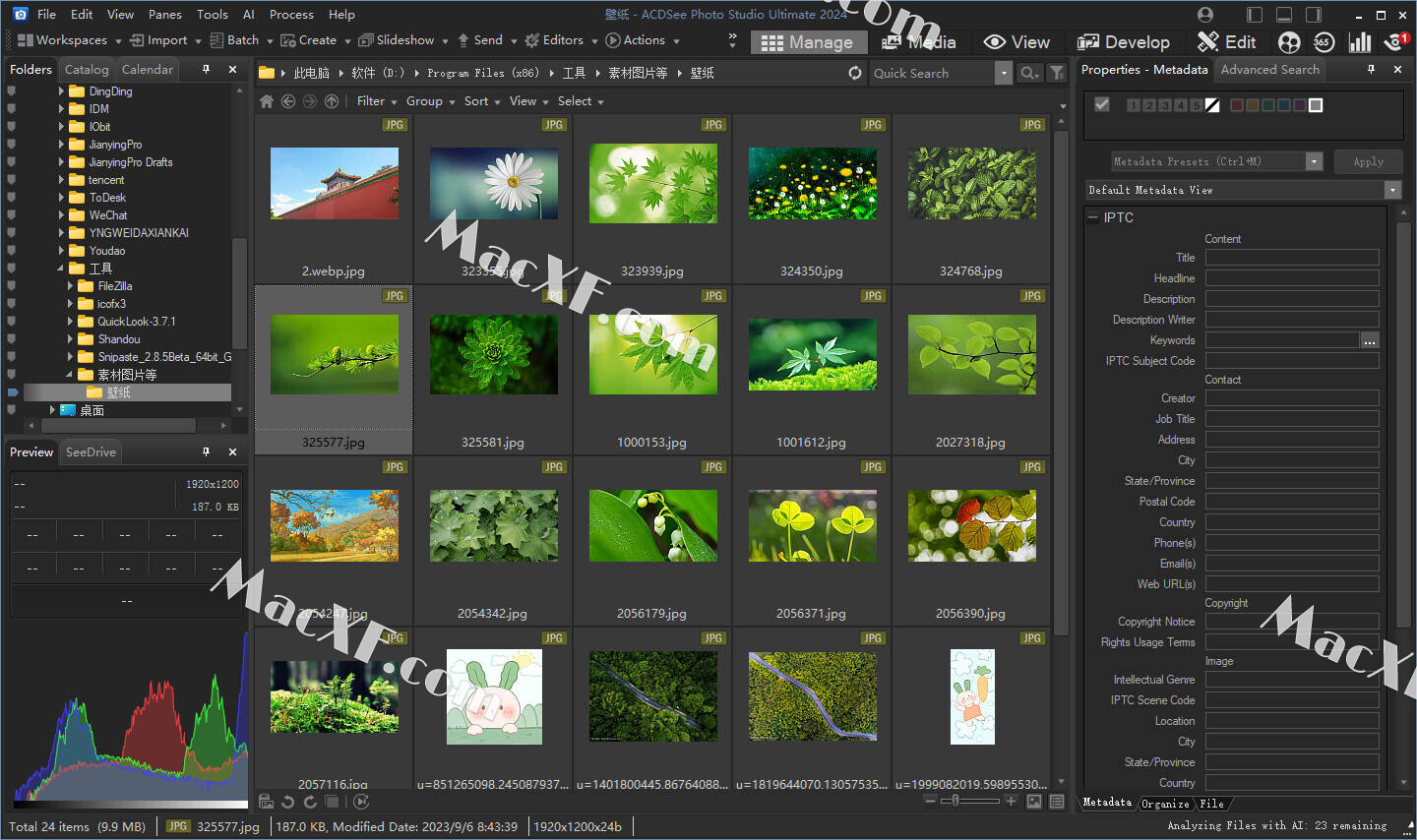
ACDSee Photo Studio Ultimate 2024特别版(图片编辑器)
ACDSee Photo Studio Ultimate 2024是一款功能全面、易于使用的图像编辑和管理软件,为摄影师和设计师提供了强大的工具和功能。无论您是进行基本的图像优化还是进行复杂的创作,ACDSee Photo Studio Ultimate 2024都将成为您的得力助手。 软件下载&#x…...
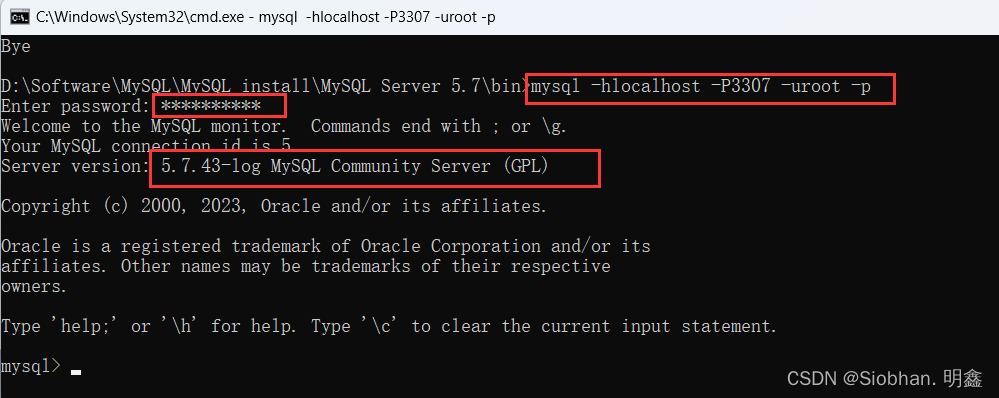
MySQL 3 环境搭建 MySQL 5.7版本的安装、配置
MySQL5.7.43官网下载地址 MySQL :: Download MySQL Community Server 这里选5.7.43,Windows版本,然后点击Go to Download Page,下载msi安装包的版本 MSI安装包版本比ZIP压缩包版本的安装过程要简单的多,过程更加清楚直观&#x…...

多媒体应用设计师 第2章 多媒体信息处理及编辑技术
1.多媒体信息的种类与特点 视觉类:文字、图像、图形、视频、动画、其他(视频、符号表示的数值、图形表示的某种数据曲线、数据库的关系数据) 听觉类:波形声音、语音、音乐 多媒体信息特点: 多媒体是有格式的。 越接近…...
【算法系列 | 10】深入解析查找算法之—线性查找
序言 心若有阳光,你便会看见这个世界有那么多美好值得期待和向往。 决定开一个算法专栏,希望能帮助大家很好的了解算法。主要深入解析每个算法,从概念到示例。 我们一起努力,成为更好的自己! 今天第10讲,讲…...

获取操作系统信息服务器信息JVM信息cpu内存磁盘信息
1.添加依赖 <dependency><groupId>com.github.oshi</groupId><artifactId>oshi-core</artifactId><version>5.6.0</version> </dependency>...

Android笔记(四)Activity之间传递可序列化的数据的优化处理
Activity之间传递可序列化的数据 Android应用开发会常常处理数据的序列化和传递。在Android中往往采用两种方式实现数据的可序列化:(1)实现java.io.Serializable接口(2)实现android.os.Parcelable接口。 将类定义为an…...

MySQL MVCC详细介绍
MVCC概念 MVCC(Multi-Version Concurrency Control) 多版本并发控制,是一种并发控制机制,用于处理数据库中的并发读写操作,它通过在每个事务中创建数据的快照,实现了读写操作的隔离性,从而避免了读写冲突和数据不一致的问题。 M…...

Element Plus阻止 el-dropdown、el-switch等冒泡事件
最近做vue3项目,使用Element Plus,又遇到坑了! 问题点:组件中遇到事件冒泡问题了,el-checkbox 中 change事件要求阻止冒泡,如下代码中要求点击checkbox时不调用li标签的show方法 <li click"show()">…...
Spring framework Day13:注解结合Java配置类
前言 前面我们管理 bean 都是在 xml 文件中去管理,本次我们将介绍如何在 Java 配置类中去管理 bean。 注解结合 Java 配置类是一种常见的 Spring 注入 Bean 的方式。通常情况下,开发人员会使用 Java Config 来定义应用程序的配置信息,而在 …...

00000
0...
)
学术论文翻译翻车重灾区!Perplexity翻译查询功能如何通过引用锚点保留+LaTeX公式智能隔离实现零失真输出(仅限Pro+订阅用户可见的隐藏模式)
更多请点击: https://intelliparadigm.com 第一章:学术论文翻译翻车重灾区的底层归因分析 学术论文翻译失准并非偶然现象,其背后存在系统性语言学、认知科学与工程实践三重张力。当非母语研究者依赖通用大模型或词典式工具进行技术文本转译时…...

Python 浅拷贝与深拷贝:为什么我改了 b,a 也跟着变了?
Python 浅拷贝与深拷贝:为什么我改了 b,a 也跟着变了? 在 Python 中,列表、字典、集合这类对象都属于可变对象。 也正因为它们“可变”,所以在复制数据时,经常会遇到一个非常经典的问题:明明我改…...
)
快速完成一篇重复率和AI率都很低的英文论文!(亲测有效)
写英文论文对于很多同学来说比较困难,今天给大家分享一下如何快速完成一篇英文论文。 直接说操作方法: 一、打开任何一个AI工具,输入指令:我是英文专业的毕业生,我的论文题目是《XXXX》,论文正文8000字&a…...

AUTOSAR Ea模块深度剖析:从原理到实战的EEPROM抽象层配置与优化
1. 项目概述:为什么我们需要深入理解Ea模块?在AUTOSAR的软件架构里,NVRAM管理器(NvM)负责非易失性数据的抽象管理,而Ea(EEPROM Abstraction,EEPROM抽象)模块,…...
)
手把手教你用MP1470芯片设计一个12V转5V的DCDC降压模块(附完整原理图与PCB布局避坑指南)
手把手教你用MP1470芯片设计一个12V转5V的DCDC降压模块(附完整原理图与PCB布局避坑指南) 在嵌入式系统开发中,稳定可靠的电源设计往往是项目成功的关键前提。当我们需要为STM32、ESP32等微控制器或各类传感器供电时,如何将常见的1…...

3步打造智能设计转换桥梁:从Figma到Unity的无缝对接方案
3步打造智能设计转换桥梁:从Figma到Unity的无缝对接方案 【免费下载链接】UnityFigmaBridge Easily bring your Figma Documents, Components, Assets and Prototypes to Unity 项目地址: https://gitcode.com/gh_mirrors/un/UnityFigmaBridge 在现代游戏开发…...
)
告别PPT!用UE5.2+Lumen打造电商级产品交互展示(附MetaShoot插件实战)
用UE5.2与Lumen零代码打造电商级3D产品交互展示全指南 想象一下,当消费者在你的电商页面上不仅能360度旋转查看产品,还能像实体店一样拆解零件、切换材质,甚至模拟产品在真实环境中的使用效果——这种沉浸式体验能将转化率提升300%以上。传统…...

AI率总超标?2026年AI论文平台排行榜权威发布,轻松定稿不是梦!
写论文效率低、熬夜赶稿、查重总不通过?别慌!2026 年最新 AI 论文写作工具合集来了,覆盖选题、大纲、初稿、润色、降重、格式、文献引用全流程,帮你精准匹配最适合的学术助手,彻底告别论文内耗!Ἴ…...

DepHell与Docker集成:容器化Python应用开发的终极指南
DepHell与Docker集成:容器化Python应用开发的终极指南 【免费下载链接】dephell :package: :fire: Python project management. Manage packages: convert between formats, lock, install, resolve, isolate, test, build graph, show outdated, audit. Manage ven…...