10.2手动推导linux中file, cdev, inode之间的关系
是时候可以手动推导一下linux里面基类父类和子类的关系了
代码放最后把
简单说明版
详细流程
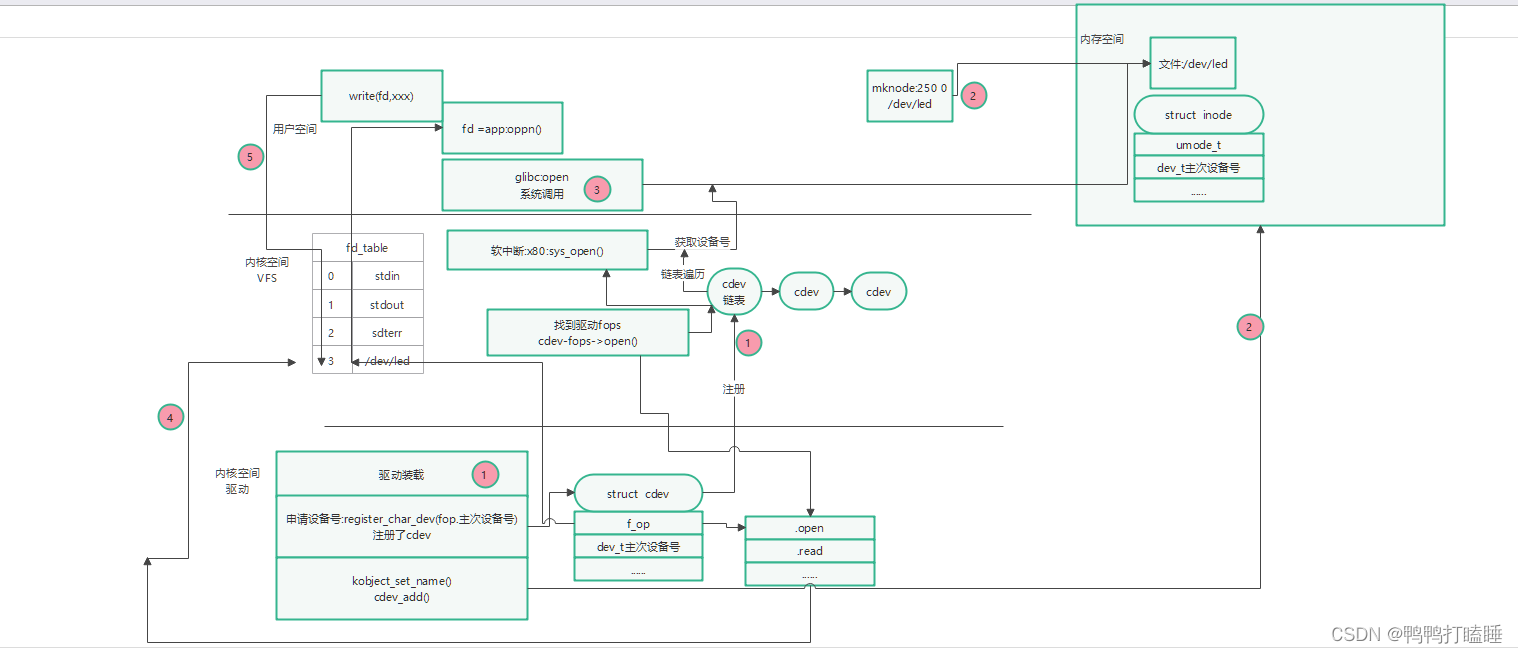
第一步注册驱动
cdev结构体能看做是一个基类,那么链表里面都是字符设备驱动的cdev连载一起,啥串口,lcd的,通过cdev->list_head连接
那cdev结构体里有主次设备号
第一步 使用register_chrdev 在内核创建了新的cdev基类,同时把驱动的file_operation和主次设备号保存在cdev中
此时把cdev放入整体的链表中 : 链表里面都是字符设备驱动的cdev连载一起,啥串口,lcd的
我们的驱动中:
register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME, &chrdevbase_fops);
struct cdev *cdev;//创造了cdev
cdev = cdev_alloc();
cdev->owner = fops->owner;
cdev->ops = fops;//cdev记录下f_op
kobject_set_name(&cdev->kobj, "%s", name); //给cdev的kobj赋值名字,也就是传入的名字
cdev_add(cdev, MKDEV(cd->major, baseminor), count);//cdev加入cdev链表cdev->dev = dev; //cdev保存主次设备号cdev->count = count;//cdev保存个设备的个数kobj_map(cdev_map, dev, count, NULL, //把这个新的dev注册进 kobj_map类型的表cdev_map中,map后续还能再升入一下exact_match, exact_lock, p); //cdev_map中就有了我们的cdevstruct probe *p;p = kmalloc_array(n, sizeof(struct probe), GFP_KERNEL); //创建新的probe来保存cdevp->owner = module;p->dev = dev;p->data = data;//cdev赋值成功
kobj_map类型 起始就是包含了一堆probe 也能叫一个probe链表
一个porbe指向另一个probe,
struct kobj_map {struct probe {struct probe *next;dev_t dev;unsigned long range;struct module *owner;kobj_probe_t *get;int (*lock)(dev_t, void *);void *data;//就保存了上面的cdev指针,这样在这个map中,cedv就连在一起了} *probes[255];struct mutex *lock;
};
第二步创建用户空间能看见的文件,也就是初始化inode节点
inode 对象:描述文件系统中的某个文件,元数据(权限,类型是否为字符设备文件这种.创建时间)
也能理解为ls -l出来的信息
crw–w---- 1 root tty 4, 1 10月 3 23:09 tty1
struct inode {
umode_t i_mode;//模式,如ls-l 出来的 crwx-rx,能区分字符设备和普通文件
kuid_t i_uid;
kgid_t i_gid;
dev_t i_rdev;//如果文件时字符设备,inode里面就有设备号,//如上面的 4 1
const struct file_operations *i_fop;
}
这里图上有两种办法1 驱动初始化后,使用mknode 手动创建一个设备节点
mknode 需要带主次设备号 是为了构造一个inode节点
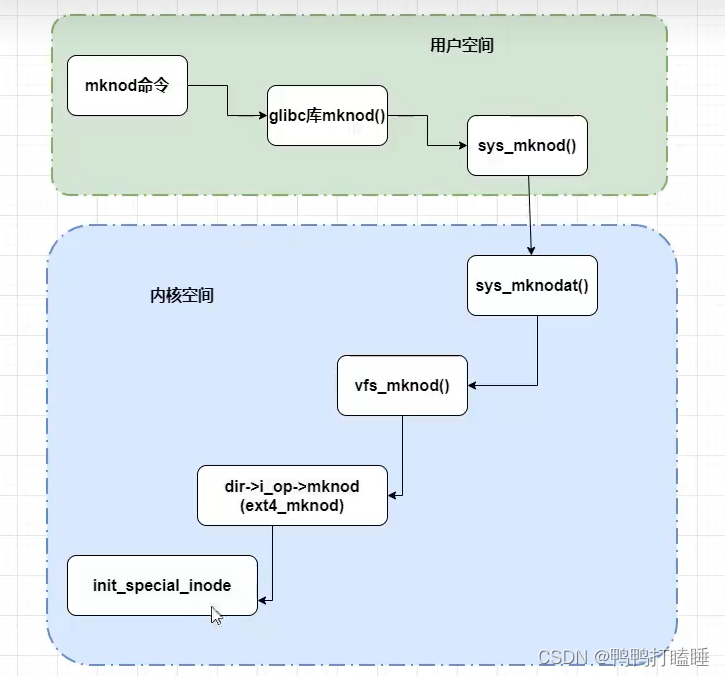
创建字符设备最后会调用到init_spectial_inode()
fs/inode.c
void init_special_inode(struct inode *inode, umode_t mode, dev_t rdev);//传入了inode节点,但是为字符设备,要继续构造inode->i_mode = mode;if (S_ISCHR(mode)) //因为是字符设备 crw--w---- 的cinode->i_fop = &def_chr_fops;//对这个inode节点的fop赋值默认的char_fop.open = chrdev_open,inode->i_rdev = rdev;另一个是cdev_add的时候使用kobj_add这些进行增加inode节点,后面找个地方细聊kobj基类,这次没看见kobj_add等函数
这一步就是为了构造出 /dev/led这个文件
第三步应用程序打开文件,第四部关联驱动的file_operation
进程打开文件 内核空间的vfs层就会生成一个struct file 对象
struct file{
struct path f_path; //文件的路径
const struct file_operations *f_op;//f_op!!!
struct inode *f_inode; //还偷偷藏了inode
unsigned int f_flags;//标志
fmode_t f_mode;//模式
loff_t f_pos;//偏移
void *private_data;//万能指针
}
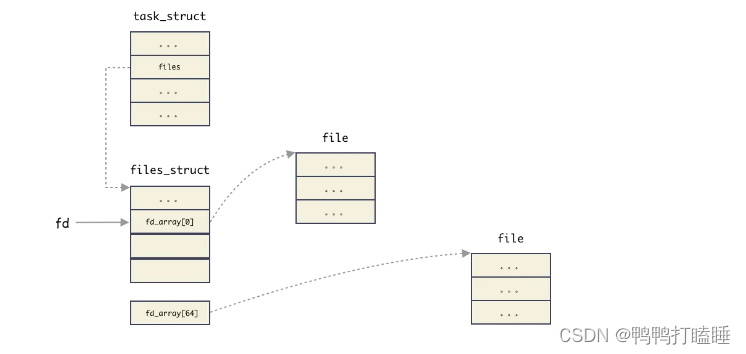
同时把这个file结构体放在 fd_table中,每个file结构体对应了这个fd_table索引号,成功后返回这个索引号
此时应用空间调用fd = open(“dev/led”, O_RDWR(标志),0666(模式)); 返回来的fd数值,也就是这个应用程序在vfs空间中对应的fd值
通过 fd_table保存了该进程打开的所有文件
应用程序:
fd = open("dev/led", O_RDWR(标志),0666(模式));
调用到glibc的open() 触发系统调用 产生0x80中断 进入内核层
vfs层:open.c
SYSCALL_DEFINE3(open, const char __user *, filename, int, flags, umode_t, mode)
上面这个系统调用的宏定义刚好就是说,建了一个系统调用的函数叫sys_open同时还传来三个参
这不就对应上了嘛
do_sys_open(AT_FDCWD, filename, flags, mode);fd = get_unused_fd_flags(flags);//找一个没有用过的fd给刚打开的文件进行分配fdstruct file *f = do_filp_open(dfd, tmp, &op);//创建了一个file结构体指针do_file_open()//pathname一层一层解析文件路径,可参考上次写的文件系统分析// 最后得到要打开文件的dentry和vfsmount,保存到结构体struct path中,// 而结构体struct path保存在struct nameidata nd变量中,nd变量也是path_openat的入参set_nameidata(&nd, dfd, pathname);// 用于根据nd寻找文件节点,并打开该文件注册的open函数filp = path_openat(&nd, op, flags | LOOKUP_RCU);//初始化filefile = alloc_empty_file(op->open_flag, current_cred());//创建一个filedo_last(nd, file, op)) > 0error = lookup_open(nd, &path, file, op, got_write);//终于寻找你的open了dentry_open(const struct path *path, int flags,const struct cred *cred)vfs_open(path, f);do_dentry_open(struct file *f, struct inode *inode,int (*open)(struct inode *, struct file *))f->f_op = fops_get(inode->i_fop);//获取inode保存的fop给file的fopopen = f->f_op->open;open(inode, f);//执行open了,这里也看得出来入参为啥是inode节点和file文件了.open = chrdev_open,//这里还有点复杂,反正最后调用了inoded的fop->open,也就是char_dev.c 的open,也是第二步赋值过来的openchrdev_open(struct inode *inode, struct file *filp)kobj = kobj_lookup(cdev_map, inode->i_rdev, &idx);//从cdev链表中,找到了kobj,关系为 kobj_map->data(cdev)->kobjcdev *new = container_of(kobj, struct cdev, kobj);//顺带就把驱动注册的cdev找出来了inode->i_cdev = p = new;//同时还把inode节点里cdev一起赋值,相当于inode也知道驱动的cdevfops = fops_get(p->ops);//拿到了驱动的fopsreplace_fops(filp, fops);//替换file的fopsret = filp->f_op->open(inode, filp);//执行驱动中的fop->open函数//进入我们的驱动里.传来的inode是这个模块的ionde,file是进程打开的这个fileint chrdevbase_open(struct inode *inode, struct file *filp)fd_install(fd, f);//关联file文件和这个fd,那我我们进程的数fd_arry中就把这个文件记录了,也把fop_改了
第五步,执行其他的write等函数
应用执行了ioctrl(fd,cmd,arg);
调用glibc的ioctrl
系统调用
0x80中断
进入内核:
VFS层 fs/ioctrl.c
SYSCALL_DEFINE3(ioctl, unsigned int, fd, unsigned int, cmd, unsigned long, arg);
ksys_ioctl(fd, cmd, arg);struct fd f = fdget(fd);//根据应用层传递的fd编号,在数组中找到file结构体do_vfs_ioctl(f.file, fd, cmd, arg);//传入file结构体,和对应的指令//从file中取出inode节点//file->dentry->inodestruct inode *inode = file_inode(filp);if (S_ISREG(inode->i_mode)) //i_noded文件类型,如果是普通文件,S_isreg regular常规的error = file_ioctl(filp, cmd, arg);else //那就是字符文件了error = vfs_ioctl(filp, cmd, arg);error = filp->f_op->unlocked_ioctl(filp, cmd, arg);
//因为file的operation在open的时候被改成我们的驱动里的了
static struct file_operations chrdevbase_fops = {unlocked_ioctl= ioctl,
}//现在就到我们驱动内部
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);代码块
driver
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : chrdevbase.c
作者 : 左忠凯
版本 : V1.0
描述 : chrdevbase驱动文件。
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2019/1/30 左忠凯创建
***************************************************************/#define CHRDEVBASE_MAJOR 200 /* 主设备号 */
#define CHRDEVBASE_NAME "chrdevbase" /* 设备名 */static char readbuf[100]; /* 读缓冲区 */
static char writebuf[100]; /* 写缓冲区 */
static char kerneldata[] = {"kernel data!"};/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int chrdevbase_open(struct inode *inode, struct file *filp)
{//printk("chrdevbase open!\r\n");return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t chrdevbase_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int retvalue = 0;/* 向用户空间发送数据 */memcpy(readbuf, kerneldata, sizeof(kerneldata));retvalue = copy_to_user(buf, readbuf, cnt);if(retvalue == 0){printk("kernel senddata ok!\r\n");}else{printk("kernel senddata failed!\r\n");}//printk("chrdevbase read!\r\n");return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t chrdevbase_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue = 0;/* 接收用户空间传递给内核的数据并且打印出来 */retvalue = copy_from_user(writebuf, buf, cnt);if(retvalue == 0){printk("kernel recevdata:%s\r\n", writebuf);}else{printk("kernel recevdata failed!\r\n");}//printk("chrdevbase write!\r\n");return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int chrdevbase_release(struct inode *inode, struct file *filp)
{//printk("chrdevbase release!\r\n");return 0;
}/** 设备操作函数结构体*/
static struct file_operations chrdevbase_fops = {.owner = THIS_MODULE, .open = chrdevbase_open,.read = chrdevbase_read,.write = chrdevbase_write,.release = chrdevbase_release,
};/** @description : 驱动入口函数 * @param : 无* @return : 0 成功;其他 失败*/
static int __init chrdevbase_init(void)
{int retvalue = 0;/* 注册字符设备驱动 */retvalue = register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME, &chrdevbase_fops);if(retvalue < 0){printk("chrdevbase driver register failed\r\n");}printk("chrdevbase init!\r\n");return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit chrdevbase_exit(void)
{/* 注销字符设备驱动 */unregister_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME);printk("chrdevbase exit!\r\n");
}/* * 将上面两个函数指定为驱动的入口和出口函数 */
module_init(chrdevbase_init);
module_exit(chrdevbase_exit);/* * LICENSE和作者信息*/
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zuozhongkai");相关文章:
10.2手动推导linux中file, cdev, inode之间的关系
是时候可以手动推导一下linux里面基类父类和子类的关系了 代码放最后把 简单说明版 详细流程 第一步注册驱动 cdev结构体能看做是一个基类,那么链表里面都是字符设备驱动的cdev连载一起,啥串口,lcd的,通过cdev->list_head连接 那cdev结构体里有主次设备号 第一步 使用r…...
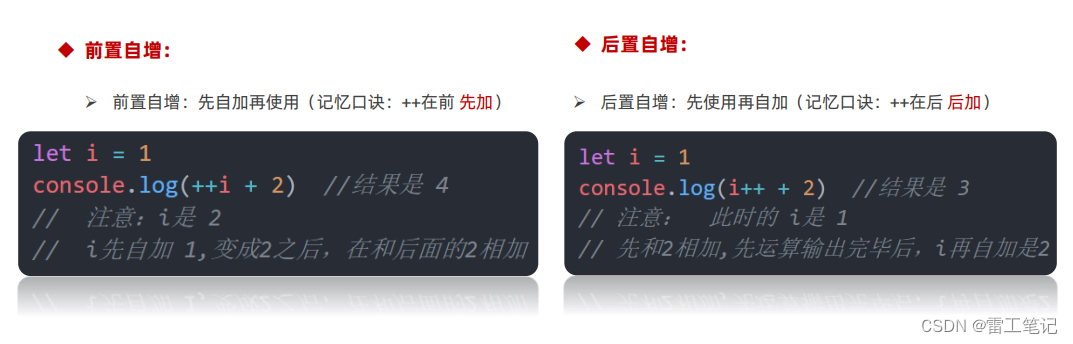
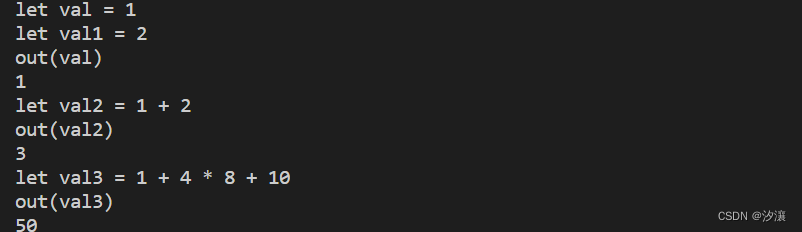
JavaScript基础知识13——运算符:一元运算符,二元运算符
哈喽,大家好,我是雷工。 JavaScript的运算符可以根据所需表达式的个数,分为一元运算符、二元运算符、三元运算符。 一、一元运算符 1、一元运算符:只需要一个表达式就可以运算的运算符。 示例:正负号 一元运算符有两…...
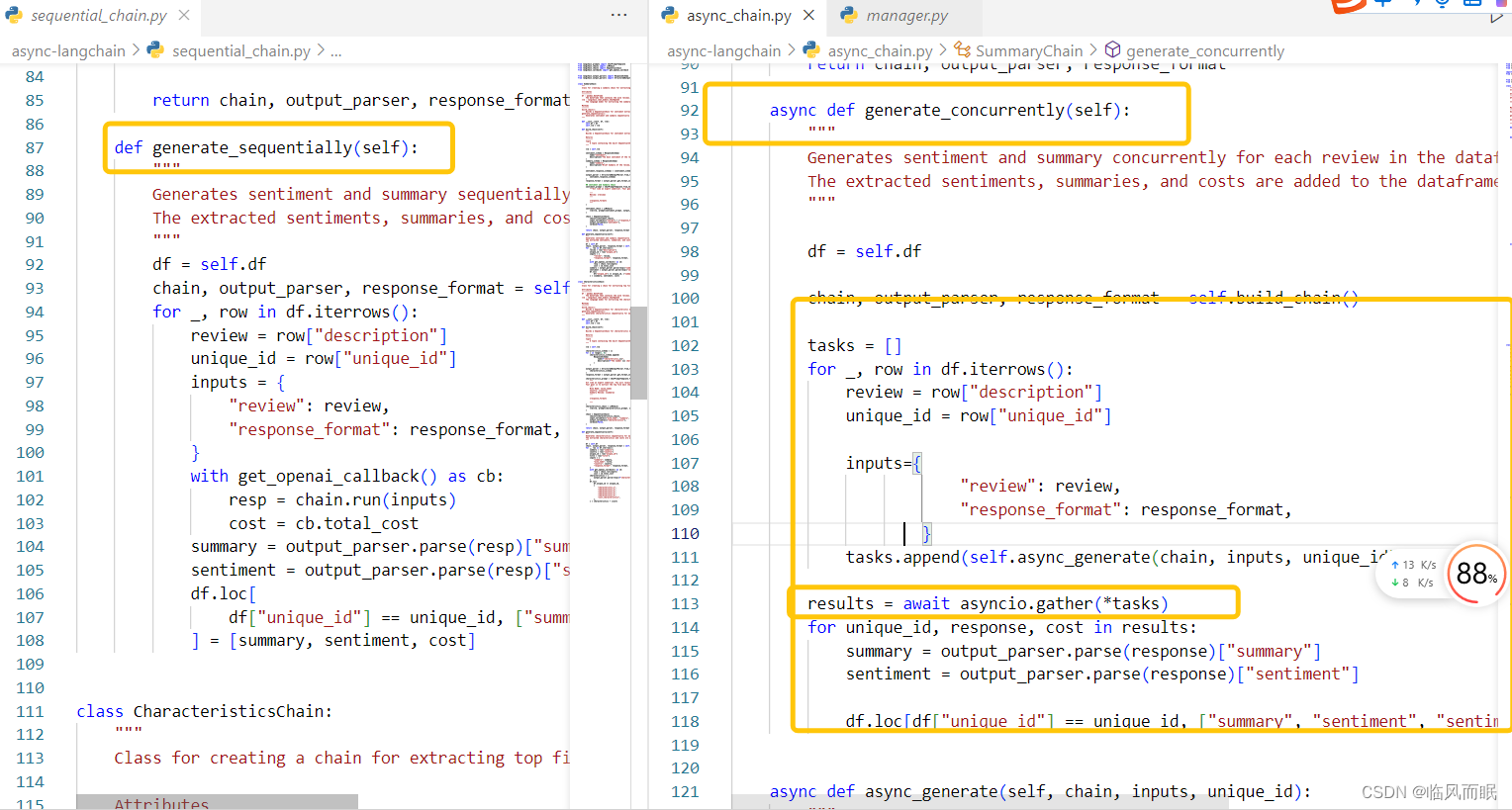
异步使用langchain
文章目录 一.先利用langchain官方文档的AI功能问问二.langchain async api三.串行,异步速度比较 一.先利用langchain官方文档的AI功能问问 然后看他给的 Verified Sources 这个页面里面虽然有些函数是异步函数,但是并非专门讲解异步的 二.langchain asy…...
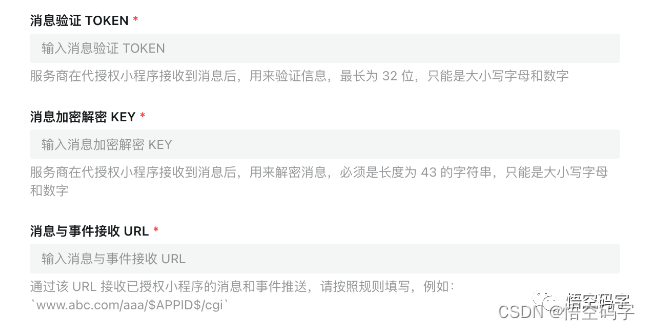
抖音开放平台第三方代小程序开发,授权事件、消息与事件通知总结
大家好,我是小悟 关于抖音开放平台第三方代小程序开发的两个事件接收推送通知,是开放平台代小程序实现业务的重要功能。 授权事件推送和消息与事件推送类型都以Event的值判断。 授权事件推送通知 授权事件推送包括:推送票据、授权成功、授…...
华为9.20笔试 复现
第一题 丢失报文的位置 思路:从数组最小索引开始遍历 #include <iostream> #include <vector> using namespace std; // 求最小索引值 int getMinIdx(vector<int> &arr) {int minidx 0;for (int i 0; i < arr.size(); i){if (arr[i] …...
二十五、【色调调整基础】
文章目录 1、亮度/对比度a、亮度b、对比度 2、曝光度3、阈值4、色阶5、反相6、黑白7、渐变映射 1、亮度/对比度 a、亮度 亮度是指画面的明亮程度 b、对比度 对比度指的是一幅图像中,明暗区域最亮和最暗之间不同亮度层级的测量,如下图所示࿰…...
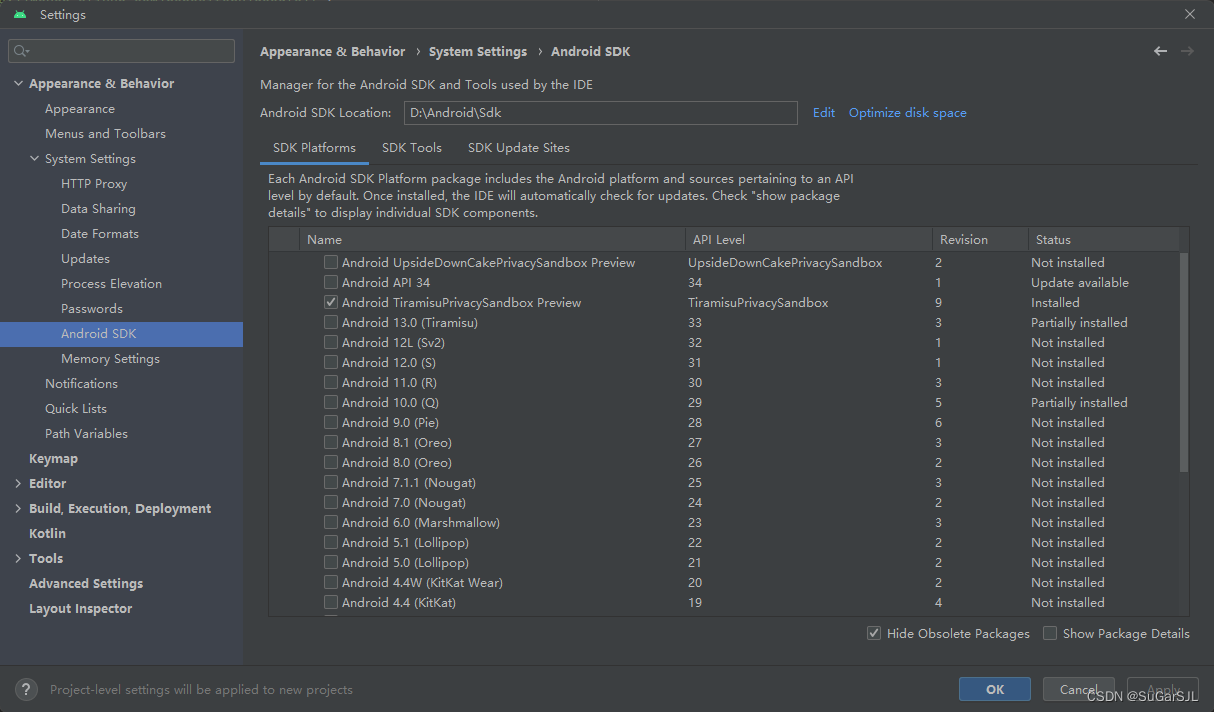
Android Studio SDK manager加载packages不全
打开Android Studio里的SDK manager,发现除了已安装的,其他的都不显示。 解决方法: 设置代理: 方便复制> http://mirrors.neusoft.edu.cn/ 重启Android Studio...

[esp32-wroom]基础开发
1、点亮LED灯 int led_pin2; void setup() {// put your setup code here, to run once:pinMode(led_pin,OUTPUT);}void loop() {// put your main code here, to run repeatedly:digitalWrite(led_pin,HIGH);delay(1000);digitalWrite(led_pin,LOW);delay(1000); } 2、LED流…...

利用Docker 实现 MiniOB环境搭建
官方文档有,但是感觉写的跟shift一样(或者是我的阅读理解跟shift一样 下面是自己的理解 一.下载docker 这个去官网下载安装,没什么说的 Docker: Accelerated Container Application Development 二.用docker下载MiniOB环境 1.打开powershell ( win r ,然后输入powershell…...

【DB2】—— 数据库表查询一直查不出来数据
问题描述 近日,数据库的测试环境中有一个打印日志表,一共有将近50w的数据,Java程序在查询的时候一直超时。 在DBvisualizer中查询数据无论是使用select * 还是 select count(*)查询的时候都是一直在执行,就是查询不到结果。 排查…...

【教程】使用vuepress构建静态文档网站,并部署到github上
官网 快速上手 | VuePress (vuejs.org) 构建项目 我们跟着官网的教程先构建一个demo 这里我把 vuepress-starter 这个项目名称换成了 howtolive 创建并进入一个新目录 mkdir howtolive && cd howtolive使用你喜欢的包管理器进行初始化 yarn init 这里的问题可以一…...

python 机器视觉 车牌识别 - opencv 深度学习 机器学习 计算机竞赛
1 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 基于python 机器视觉 的车牌识别系统 🥇学长这里给一个题目综合评分(每项满分5分) 难度系数:3分工作量:3分创新点:3分 🧿 更多资…...
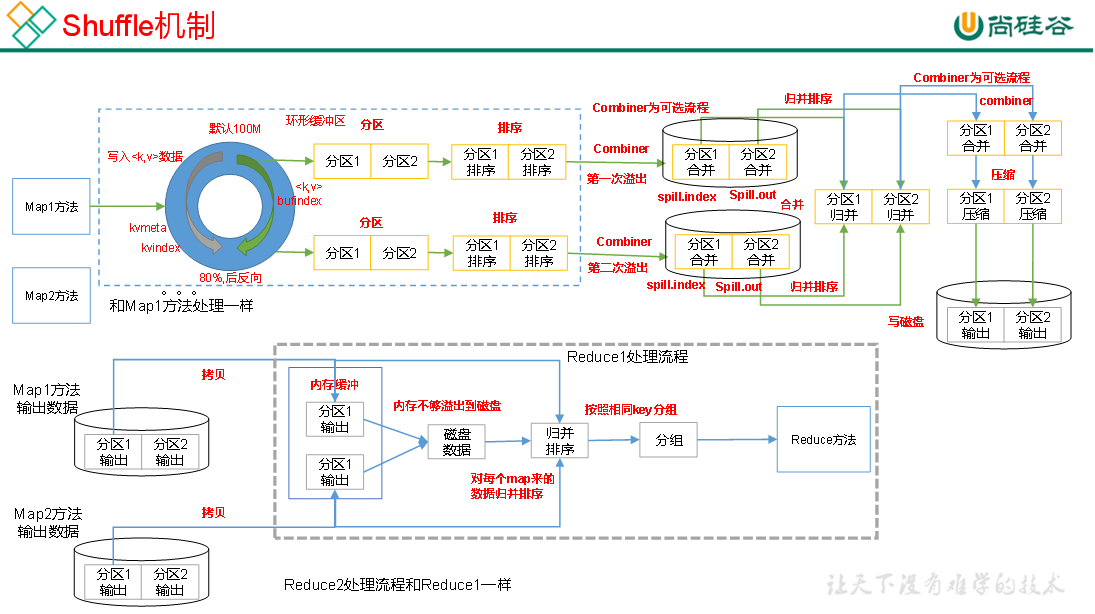
Hadoop3教程(十二):MapReduce中Shuffle机制的概述
文章目录 (95) Shuffle机制什么是shuffle?Map阶段Reduce阶段 参考文献 (95) Shuffle机制 面试的重点 什么是shuffle? Map方法之后,Reduce方法之前的这段数据处理过程,就叫做shuff…...

MySQL为什么用b+树
索引是一种数据结构,用于帮助我们在大量数据中快速定位到我们想要查找的数据。 索引最形象的比喻就是图书的目录了。注意这里的大量,数据量大了索引才显得有意义,如果我想要在[1,2,3,4]中找到4这个数据,直接对全数据检索也很快&am…...

浅谈机器学习中的概率模型
浅谈机器学习中的概率模型 其实,当牵扯到概率的时候,一切问题都会变的及其复杂,比如我们监督学习任务中,对于一个分类任务,我们经常是在解决这样一个问题,比如对于一个n维的样本 X [ x 1 , x 2 , . . . .…...

MySQL 函数 索引 事务 管理
目录 一. 字符串相关的函数 二.数学相关函数 编辑 三.时间日期相关函数 date.sql 四.流程控制函数 centrol.sql 分页查询 使用分组函数和分组字句 group by 数据分组的总结 多表查询 自连接 子查询 subquery.sql 五.表的复制 六.合并查询 七.表的外连接 …...

Flink如何基于事件时间消费分区数比算子并行度大的kafka主题
背景 使用flink消费kafka的主题的情况我们经常遇到,通常我们都是不需要感知数据源算子的并行度和kafka主题的并行度之间的关系的,但是其实在kafka的主题分区数大于数据源算子的并行度时,是有一些注意事项的,本文就来讲解下这些注…...
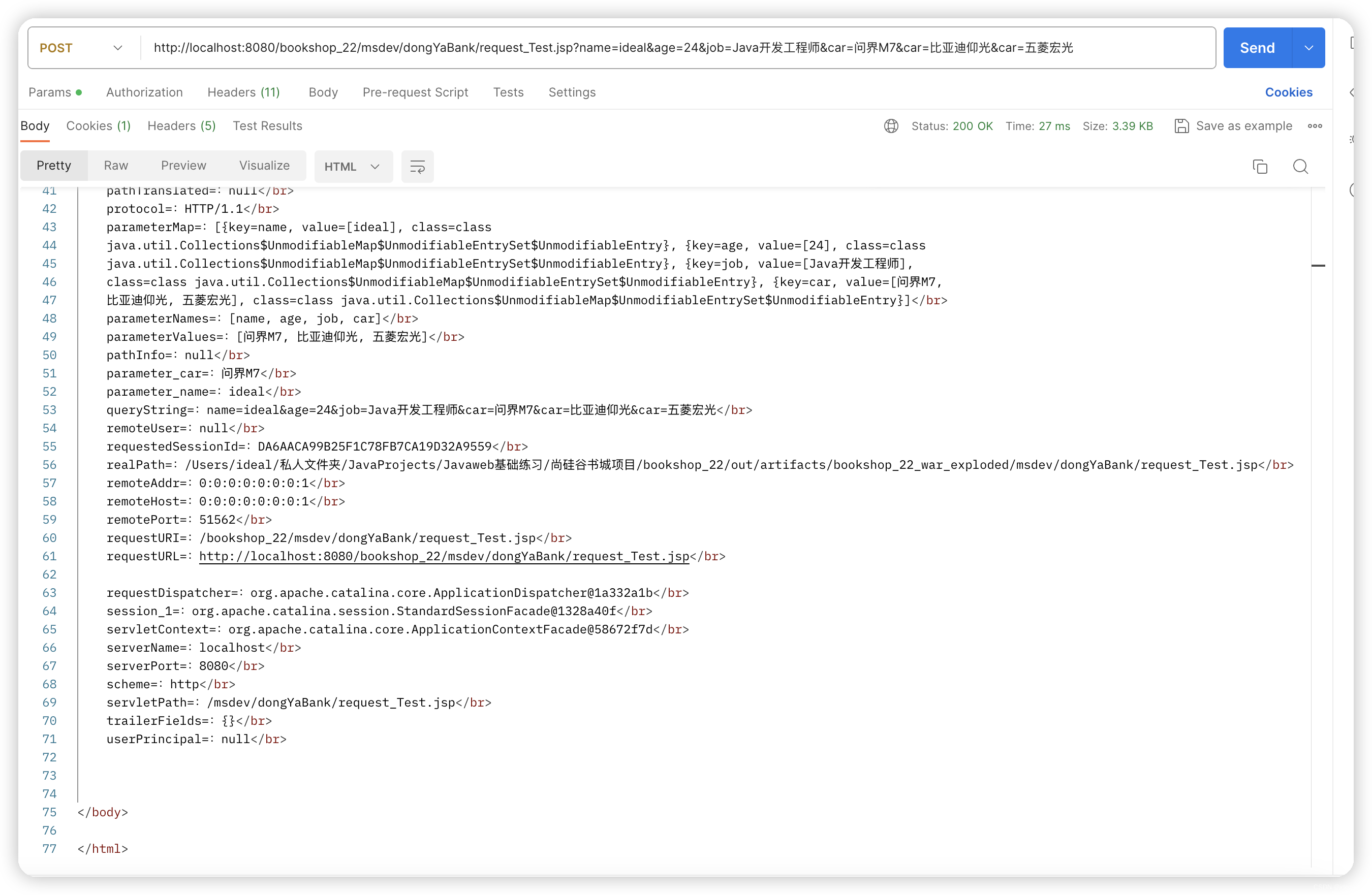
总结:JavaEE的Servlet中HttpServletRequest请求对象调用各种API方法结果示例
总结:JavaEE的Servlet中HttpServletRequest请求对象调用各种API方法结果示例 一方法调用顺序是按照英文字母顺序从A-Z二该示例可以用作servlet中request的API参考,从而知道该如何获取哪些路径参数等等三Servlet的API版本5.0.0、JSP的API版本:…...
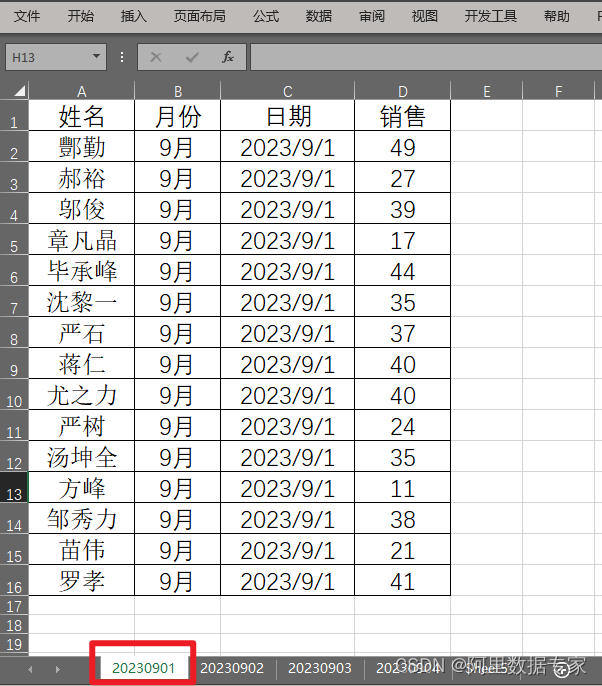
ChatGPT AIGC 完成Excel跨多表查找操作vlookup+indirect
VLOOKUP和INDIRECT的组合在Excel中用于跨表查询,其中VLOOKUP函数用于在另一张表中查找数据,INDIRECT函数则用于根据文本字符串引用不同的工作表。具体操作如下: 1.假设在工作表1中,A列有你要查找的值,B列是你希望查询的工作表名称。 2.在工作表1的C列输入以下公式:=VLO…...

Linux系统conda虚拟环境离线迁移移植
本人创建的conda虚拟环境名为yys(每个人的虚拟环境名不一样,替换下就行) 以下为迁移步骤: 1.安装打包工具将虚拟环境打包: conda install conda-pack conda pack -n yys -o yys.tar.gz 2.将yys.tar.gz上传到服务器&…...

如何开始嵌入式Linux的学习呢?
如何开始嵌入式Linux的学习呢? (又名:Imx-forge上手Roadmap) 我昨天一下班就回去看了一下仓库,的确太乱,而且mkdocs工具日益陷入停滞维护,所以我们转网站啦! 我本来打算直接画一个…...

别再死记Ld≠Lq了!从磁路角度,手把手教你区分永磁同步电机的凸极与隐极
永磁同步电机:从磁路本质破解凸极与隐极的认知迷思 在电机工程领域,永磁同步电机(PMSM)的凸极与隐极特性常被简化为"Ld≠Lq"的数学表述,这种表面化的理解就像仅通过体温判断疾病一样片面。真正掌握这一概念需要深入磁路层面&#x…...

【模拟CMOS集成电路】噪声分析实战指南——从模型到计算的完整路径
1. 噪声分析的必要性与基础概念 做模拟电路设计的朋友们应该都深有体会,噪声就像个甩不掉的影子,时时刻刻影响着我们的设计。记得我第一次做低噪声放大器时,仿真结果看起来很美,实测却发现信号完全被噪声淹没,那种挫败…...

杰理之部分芯片跑2.3G出现连接不上【篇】
部分芯片跑2.3G出现连接不上...

如何用OBS插件打造专业音乐直播?Tuna插件完整指南
如何用OBS插件打造专业音乐直播?Tuna插件完整指南 【免费下载链接】tuna Song information plugin for obs-studio 项目地址: https://gitcode.com/gh_mirrors/tuna1/tuna 想让你的OBS直播画面瞬间升级为专业音乐电台风格吗?Tuna插件正是你需要的…...

AI HYCAN 007 空气悬架智能功率 MOSFET 完整选型方案
2026年随着 AI 技术在车身控制系统中的深度渗透,HYCAN 007 空气悬架对功率 MOSFET 提出更高要求:高频化、低损耗、高可靠性、小封装。微碧半导体(VBsemi)基于先进 Trench 工艺,为您提供覆盖压缩机驱动、电磁阀控制、电…...

忘记压缩包密码怎么办?3步找回加密文件的终极免费解决方案
忘记压缩包密码怎么办?3步找回加密文件的终极免费解决方案 【免费下载链接】ArchivePasswordTestTool 利用7zip测试压缩包的功能 对加密压缩包进行自动化测试密码 项目地址: https://gitcode.com/gh_mirrors/ar/ArchivePasswordTestTool 你是否曾经面对一个加…...

Axure RP中文语言包技术深度解析:从键值对到国际化架构的工程实践
Axure RP中文语言包技术深度解析:从键值对到国际化架构的工程实践 【免费下载链接】axure-cn Chinese language file for Axure RP. Axure RP 简体中文语言包。支持 Axure 11、10、9。不定期更新。 项目地址: https://gitcode.com/gh_mirrors/ax/axure-cn 在…...

ClawDrive:为AI智能体设计的语义文件管理与跨模态检索系统
1. 项目概述:ClawDrive,为AI智能体打造的“语义硬盘” 如果你和我一样,每天被海量的文档、图片、音频和视频文件淹没,传统的文件夹分类和文件名搜索早已力不从心。更头疼的是,当你尝试让AI助手(比如Claude…...

别再为混合仿真发愁了!手把手教你用Cadence AMS搭建Verilog+模拟电路联合仿真环境
混合仿真实战:从零搭建Verilog与模拟电路的联合仿真环境 第一次接触混合仿真的工程师们,往往会在数字与模拟世界的交界处感到迷茫。Verilog的离散事件与SPICE的连续波形如何共存?信号在不同域之间传递时会出现哪些意想不到的问题?…...