关于6轴球腕机械臂的肩部奇异描述纠正
对于常见的球腕6轴机械臂构型,在大多数资料中奇异点描述如下:
-
肩部奇异点(Shoulder singularity): 肩部奇异点是在机器人手腕的中心与J1轴关节在同一条直线上时发生。这种情况下,会导致关节轴1和4试图瞬间旋转180度。
-
肘部奇异点(Elbow singularity): 当机器人手腕的中心与关节轴2和3处于同一平面时,会产生肘部奇异点。肘部奇异点看起来像机器人“伸得太远”,导致肘部锁定在某个空间位置。
-
腕部奇异点(Wrist singularity): 当机器人的两个手腕轴(关节轴4和6)在同一条直线上时,就会发生这种情况,这可能会导致这些关节试图立即旋转180度。
对于肘部奇异和腕部奇异,博主无异议,而对于肩部奇异点,博主发现一个问题,即即使球腕中心点与J1轴线不重合,也可能存在该问题。
案例如下:
现有一机器人构型(最常见的构型)如下图所示,

MDH被定义为:
robot:: 6 axis, RRRRRR, modDH, slowRNE
+---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 0.1| 0| 0| 0|
| 2| q2| 0| 0| 1.5708| 1.5708|
| 3| q3| 0| 0.2| 0| 1.5708|
| 4| q4| 0.2| 0| 1.5708| 0|
| 5| q5| 0| 0| -1.5708| 0|
| 6| q6| 0.1| 0| 1.5708| 0|
+---+-----------+-----------+-----------+-----------+-----------+
在当前位置下,坐标系456原点与1轴重合,发现雅可比矩阵的秩为5。

当我给连杆2一个较大的偏置时,此处d2=200,此时构型如下图所示:

从下图中可以看到,坐标系456原点与J1轴线已不再重合,但雅可比矩阵仍奇异。

由此可见,常见的肩部奇异描述是有问题的,正确的肩部奇异点描述应如下:
腕部中线点在通过J1轴线且平行J2轴线的平面上。
腕部中线点在通过J1轴线且平行J2轴线的平面上。
腕部中线点在通过J1轴线且平行J2轴线的平面上。
测试代码如下:
% 通过修改d2的值,观察该现象
clear,clc,close alld1 = 100;
d2 = 0;
d4 = 200;
d6 = 100;
a3 = 200;
d=[d1 d2 0 d4 0 d6]/1000;
a=[0 0 a3 0 0 0]/1000;
alpha=[0 pi/2 0 pi/2 -pi/2 pi/2];
offset = [0 pi/2 pi/2 0 0 0];for i=1:6Link(i) = RevoluteMDH('d', d(i),'a', a(i),'alpha', alpha(i), 'offset', offset(i));
endrobot = SerialLink(Link,'name','robot')R = sqrt(a3*a3+d4*d4);
q = [0,-asin(a3/R),pi/2,0,pi/4,pi/2]
J = robot.jacob0(q)
[~,S,~]=svd(J)
rankJ = rank(J)
robot.plot(q)
jsingu(J)T01 = robot.links(1).A(q(1)).T;
T12 = robot.links(2).A(q(2)).T;
T23 = robot.links(3).A(q(3)).T;
T34 = robot.links(4).A(q(4)).T;
T04 = T01 * T12 * T23 * T34
参考链接:
- https://zhuanlan.zhihu.com/p/531651439
- https://www.cad2d3d.com/post-1615.html
- https://www.163.com/dy/article/GIBAB7RQ05524DYX.html
- https://www.mecademic.com/academic_articles/singularities-6-axis-robot-arm/
相关文章:
关于6轴球腕机械臂的肩部奇异描述纠正
对于常见的球腕6轴机械臂构型,在大多数资料中奇异点描述如下: 肩部奇异点(Shoulder singularity): 肩部奇异点是在机器人手腕的中心与J1轴关节在同一条直线上时发生。这种情况下,会导致关节轴1和4试图瞬间旋…...

Python —— hou.Node class
Houdini内所有节点(Object、SOP、COP等)的基类,该类的实例对应houdini内的节点; 每个节点都有一个唯一的路径(定义其在节点树内的位置);节点路径层次结构类似于文件系统中的文件和文件夹的层次结…...
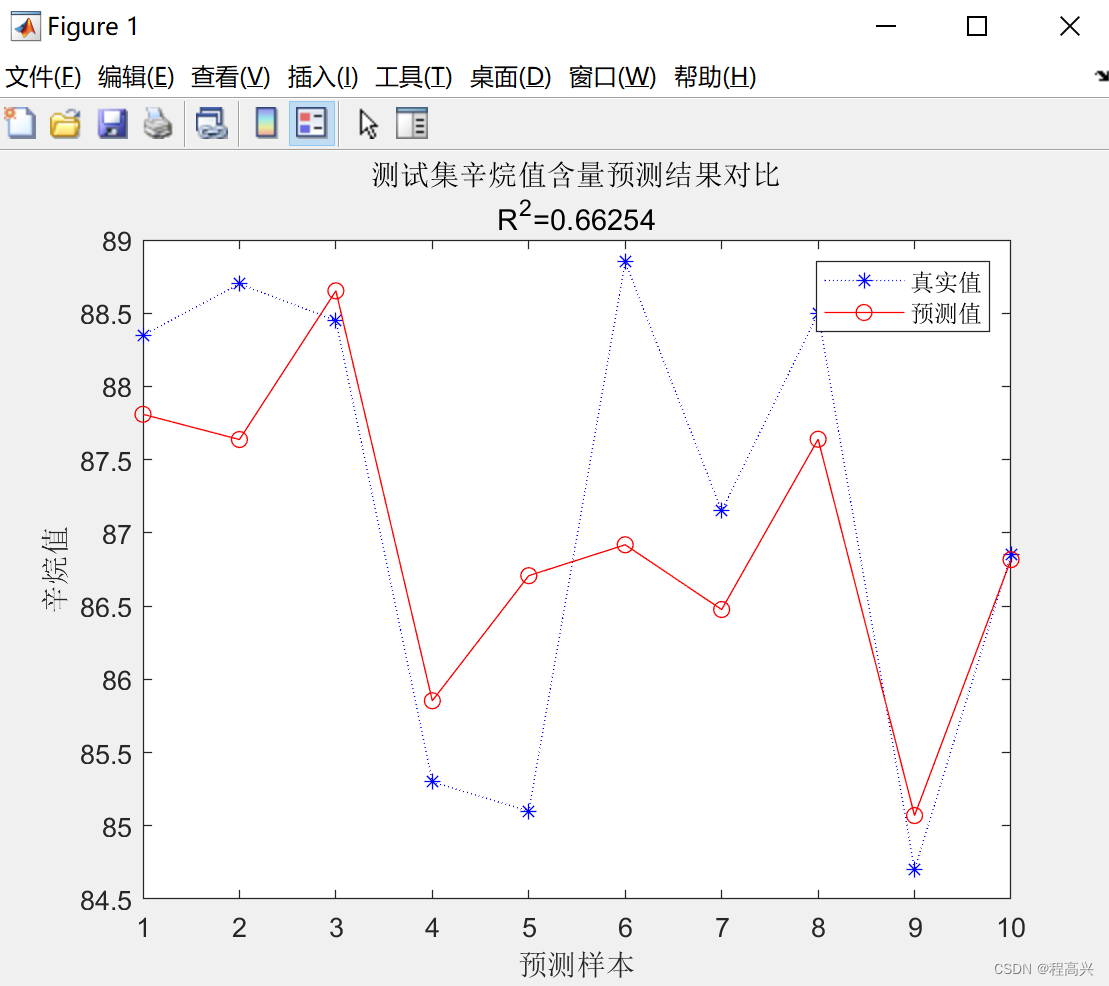
MATLAB——RBF、GRNN和PNN神经网络案例参考程序
欢迎关注“电击小子程高兴的MATLAB小屋” %————RBF程序实例 %% I. 清空环境变量 clear all clc %% II. 训练集/测试集产生 %% % 1. 导入数据 load spectra_data.mat %% % 2. 随机产生训练集和测试集 temp randperm(size(NIR,1)); % 训练集——50个样本 P_train NIR(t…...

E138: Can‘t write viminfo file
E138: Can’t write viminfo file /home/xxx/.viminfo! 原因 进入/home/xxx/目录下,用ls -a你会发现有很多.viminfa.tmp - .viminfz.tmp 这种的临时文件,这是因为使用vim编辑器时,如果编辑器没有正常退出就会生成一个暂存文件,…...
Compose Canvas基础(2) 图形转换
Compose Canvas基础(2)图形转换 前言平移 translate缩放 scale旋转 rotate自定义绘图区域及绘制内边距inset组合转换 withTransform完整代码总结 上一篇文章 Compose Canvas基础(1) drawxxx方法 前言 阅读本文需要一定compose基…...
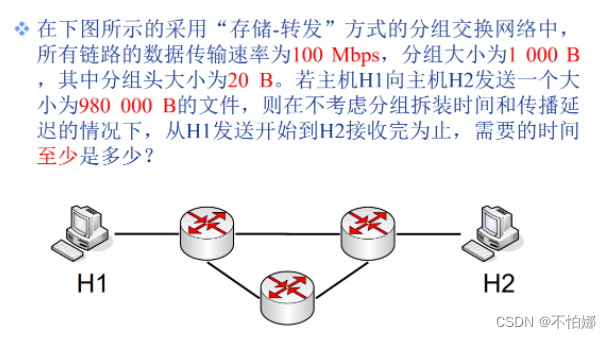
【计算机网络笔记】分组交换中的报文交付时间计算例题
系列文章目录 什么是计算机网络? 什么是网络协议? 计算机网络的结构 数据交换之电路交换 数据交换之报文交换和分组交换 系列文章目录题目解答 题目 在下图所示的采用“存储-转发”方式的分组交换网络中所有链路的数据传输速率为100 Mbps,分…...
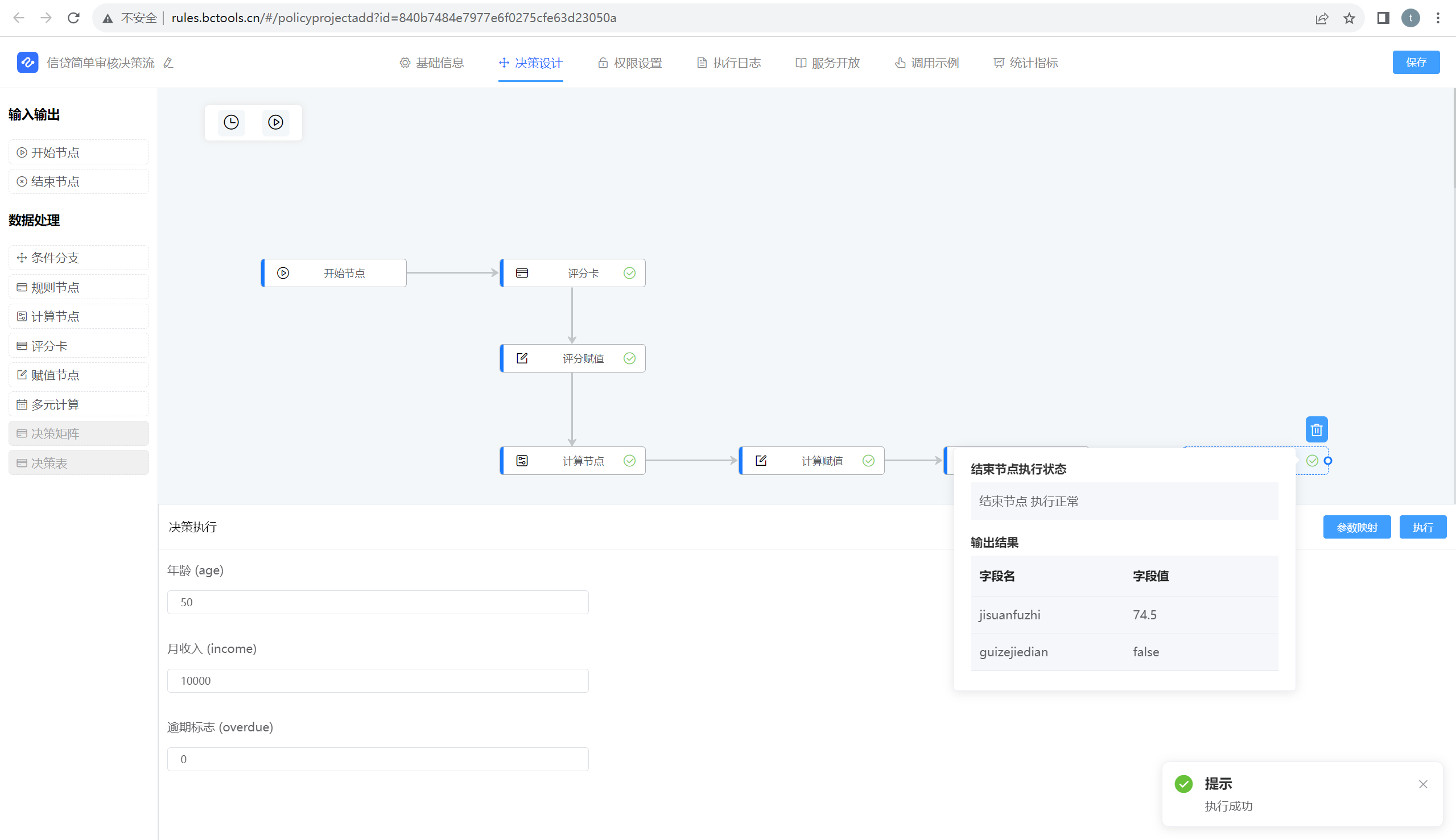
JVS-rules规则引擎,解决大数据风控的自动化决策利器
规则引擎中的评分卡节点是一种用于评估客户信用、风险等级或其他指标的重要工具。它通常用于金融、信贷等领域,以便根据一系列预定义的规则和权重来对客户进行评分。以下是评分卡节点的主要功能、作用以及配置方式的介绍: 功能和作用: 评估…...
dvaJs在react 项目中的简单使用
官网:入门课 | DvaJS 备注:个人学习 代码示例: getColumns.js const getColumns [{title: 姓名, // 列标题dataIndex: name, // 数据字段名称,与数据中的字段名对应key: name, // 列的唯一键},{title: 年龄, // 列标题dataIn…...

如何将las数据转换为osgb数据?
答:如果是需要用点云建模可使用重建大师。如果只是想转换格式可以使用网格大师的点云转osgb工具。 重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,POS信息及像控点,输出…...

创新与重塑,佛塑科技打造集团型 CRM 建设标杆
“十四五”时期是我国全面建成小康社会、实现第一个百年奋斗目标之后,乘势而上开启全面建设社会主义现代化国家新征程、向第二个百年奋斗目标进军的第一个五年。 在政府有序推进“十四五”规划的进程中,佛山佛塑科技集团股份有限公司(证券简…...
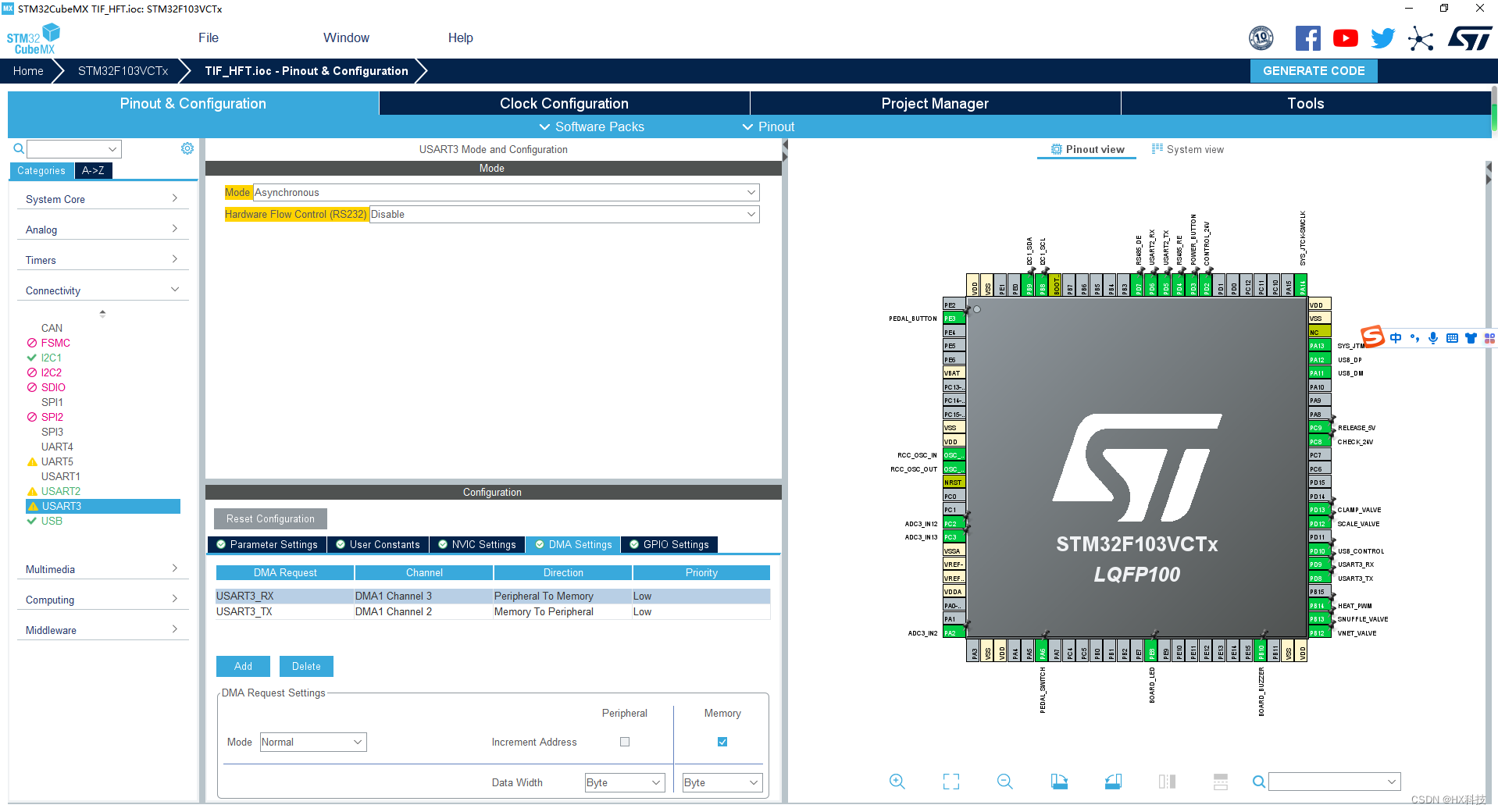
STM32CUBEMX_DMA串口空闲中断接收+接收发送缓冲区
STM32CUBEMX_DMA串口空闲中断接收接收发送缓冲区 前言: 我了解的串口接收指令的方式有:在这里插入图片描述 1、接收数据中断特定帧尾 2、接收数据中断空闲中断 3、DMA接收空闲中断 我最推荐第三种,尤其是数据量比较大且频繁的时候 串口配置 …...
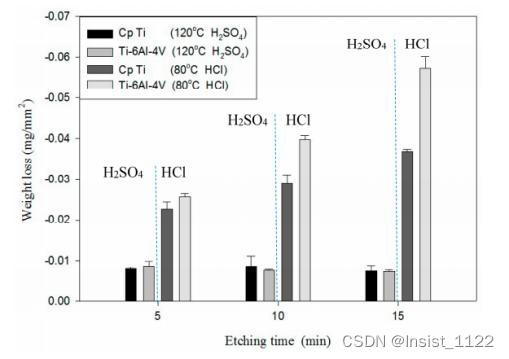
酸蚀刻对钛医药材料纳米形态表面特性及活化能的影响
引言 由于商业纯钛(CP Ti)具有抗腐蚀性,并且具有合适的机械性能以及生物相容性,因此,目前一直被用作牙科植入材料。为了在临床手术中获得高水平的成功,CP Ti的表面质量和形貌是影响植入手术结果的比较关键的因素之一,…...

iOS代码混淆工具推荐:IPA Guard详细介绍
iOS代码混淆工具推荐:IPA Guard详细介绍 目录 摘要: 引言 正文 1. IPA Guard概述 2. IPA Guard的功能特性 3. IPA Guard的混淆模式 4. 支持的语言 5. 使用场景 总结 参考资料 总结 参考资料 摘要: 了解并选择合适的iOS代码混淆工…...
Vue检测数据的原理
Vue能够对用户的数据进行响应式,也就是你在data中写了什么,你在模板中用到data的部分就会渲染成什么,那么Vue是怎么知道用户修改了data中的数据变化并对模板重新进行解析的呢? 在Vue将数据存储为自身的_data之前,Vue会…...
队列的运行算法
1.链队: 插入 删除 打印 取队顶 #include <stdio.h> #include <stdlib.h>typedef struct Qnode{int data;struct Qnode *next; }Qnode,*QuenePtr;typedef struct {QuenePtr front;QuenePtr rear; }LinkQueue; //初始化 void InitQueue(LinkQueue *q){(…...

KVM/qemu安装UOS 直接让输入用户密码
错误信息 安装后出现: 1、点击刚刚建立的虚拟机最上角感叹号(设备管理器) ----新建硬件---输入----类型:【通用 USB Mouse】。 ----新建硬件---输入----类型:【通用 USB keyboard】。 2、在设备管理器中----新建硬…...

画一条0.5px的线、设置小于12px的字体、解决 1px 问题
1、如何画一条0.5px的线 ① 采用 transform: scale() 的方式 该方法用来定义元素的 2D 缩放转换; .line {width: 100px;height: 40px;transform: scale(1,0.5);background-color: red;} ② 采用 meta viewport 的方式 这样就能缩放到原来的 0.5 倍,如…...
Unity中Shader的深度写入ZWrite
文章目录 前言一、更新深度缓冲区中值二、深度值的写入操作只有两个选择 开启 和 关闭ZWrite OnZWrite Off 三、深度写入在半透明物体物体中开启的情况1、特效一般都需要关闭深度写入2、如果在人物模型上使用 特效半透明 的 Shader,为了不出现模型自身穿透问题&…...

Jetson nano 系列之7—jetson 通过rtp将视频发给远程host
Jetson nano 系列之7—jetson 通过rtp将视频发给远程host 1.笔记本端配置1.1 安装VLC软件1.2 配置端口号1.3 创建SDP 文件2.执行命名,查看效果2.1 jetson端2.2 笔记本端参考文献本博客介绍了将jetson nano csi摄像头的视频通过rtp发给其他主机(这里是一台windows笔记本)。 …...
有哪些值得推荐的优秀 HTMLCSS 网站前端设计的网络资源(博客、论坛)?
前言 推荐几个有意思的CSS学习的网站和github上的学习类型的项目~ 网站推荐 1、CODEPEN 代码与所展示的页面相互对应,你可以在上面找到其他人已经写好的demo,参考 代码效果 网址:https://codepen.io 2、Coding Fantasy 通过游戏的形式来提…...

初创团队如何借助Taotoken统一管理AI模型调用与成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初创团队如何借助Taotoken统一管理AI模型调用与成本 对于资源有限的初创技术团队而言,在产品中集成人工智能功能已成为…...

MySQL 数据库基础入门:从概念到实战
前言:在程序开发中,数据存储是核心需求之一。虽然文件也能保存数据,但面对安全性、查询效率、海量存储等场景,文件存储的短板暴露无遗。而数据库作为专门的数据分析和管理工具,完美解决了这些问题,成为程序…...

RapidIO多播技术原理与应用实践
1. RapidIO多播技术概述 在分布式计算和高速互连系统中,多播(Multicast)技术扮演着至关重要的角色。简单来说,多播就像是在会议室里用广播系统发布通知——只需说一次,所有打开扬声器的房间都能同时听到。RapidIO作为高…...

FPGA边缘视觉方案解析:从芯片选型到多传感器融合实战
1. 项目概述:单芯片FPGA嵌入式视觉与融合分析方案 最近在梳理一些老项目的技术文档时,翻到了Altera(现在已是Intel PSG的一部分)和Eutecus在2015年左右合作推出的一套方案,当时在EE Times上被称作“Single-Chip FPGA-B…...

TEdit地图编辑器:从零开始掌握泰拉瑞亚世界创作
TEdit地图编辑器:从零开始掌握泰拉瑞亚世界创作 【免费下载链接】Terraria-Map-Editor TEdit - Terraria Map Editor - TEdit is a stand alone, open source map editor for Terraria. It lets you edit maps just like (almost) paint! It also lets you change w…...

如何用自动化脚本解放双手:淘宝淘金币全任务一键完成指南
如何用自动化脚本解放双手:淘宝淘金币全任务一键完成指南 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taojinbi 还…...

告别模拟器!3种方法在Windows上直接安装Android应用
告别模拟器!3种方法在Windows上直接安装Android应用 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想在Windows电脑上流畅运行Android应用,却厌…...

构建个人游戏串流服务器:Sunshine开源方案深度指南
构建个人游戏串流服务器:Sunshine开源方案深度指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine Sunshine是一款开源的自托管游戏串流服务端,专为Moonlig…...

地理空间AI基准测试平台geobench:标准化评估与实战指南
1. 项目概述:一个为地理空间AI量身定制的基准测试平台如果你正在或即将踏入地理空间人工智能这个领域,无论是想评估一个预训练模型在遥感影像上的表现,还是想为自己的新算法找一个公平、全面的“擂台”,你大概率会遇到一个头疼的问…...
显卡里的幽灵:我们是否也只是几分钟前被唤醒的玻尔兹曼大脑?)
(随想)显卡里的幽灵:我们是否也只是几分钟前被唤醒的玻尔兹曼大脑?
一个诡异的瞬间 之前一直用kimi2.5的API,每月花不少钱,肉疼。今天一咬牙,在自己的游戏显卡(RTX 4080)上部署GLM-4.7-Flash。 GPU嗡嗡响了几分钟,权重加载完毕,模型真跑起来了。我接上hermes&…...