STM32 使用microros与ROS2通信
本文主要介绍如何在STM32中使用microros与ROS2进行通信,在ROS1中标准的库是rosserial,在ROS2中则是microros,目前网上的资料也有一部分了,但是都没有提供完整可验证的demo,本文将根据提供的demo一步步给大家进行演示。
1、首先如果你用的不是STM32F4的话,则需要自己去生成micro_ros_stm32cubemx_utils库,博文demo使用的硬件是STM32F407芯片,提供的micro_ros_stm32cubemx_utils库也是F4的,工程目录如下图所示:
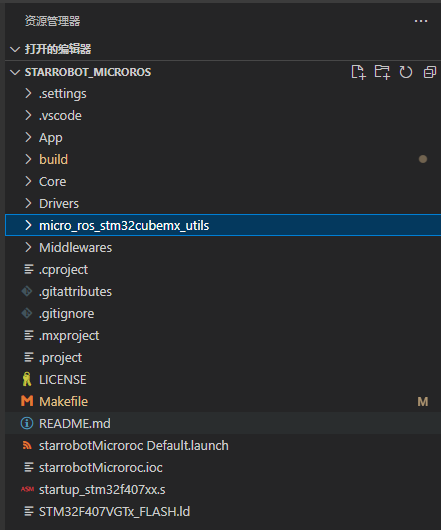
工程使用STM32CubeMX软件进行端口硬件等代码的初始化,大家在开发中可以对stattobotMicroros.ioc文件进行编辑,本文不对STM32CubeMX的使用进行讲解,大家可以自行百度学习。
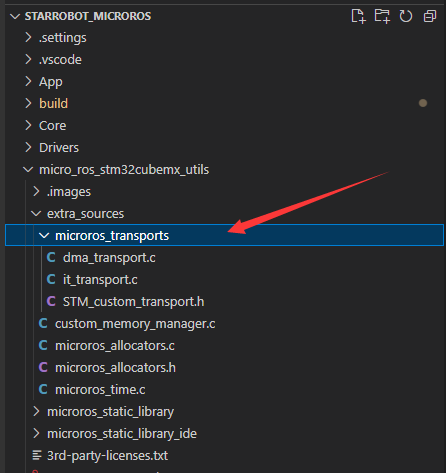
2、micro_ros_stm32cubemx_utils使用提供了中断读写和DMA读写的接口,大家根据自己实际使用的端口对文件,dma_transports.c,it_transport.c
3、microros_tasks.c是microsros初始化和节点发布订阅的文件,
void starrobot_microros_init(void){MX_USART1_UART_Init();rmw_ret_t status = rmw_uros_set_custom_transport(true,(void *) &huart1,cubemx_transport_open,cubemx_transport_close,cubemx_transport_write,cubemx_transport_read);rcl_allocator_t freeRTOS_allocator = rcutils_get_zero_initialized_allocator();freeRTOS_allocator.allocate = microros_allocate;freeRTOS_allocator.deallocate = microros_deallocate;freeRTOS_allocator.reallocate = microros_reallocate;freeRTOS_allocator.zero_allocate = microros_zero_allocate;if (!rcutils_set_default_allocator(&freeRTOS_allocator)) {printf("Error on default allocators (line %d)\n", __LINE__); }
}该函数主要是对硬件进行注册绑定,使用的硬件,打开、关闭、读写、函数与microros的接口进行绑定。
void run_starrobotSTM_node(void){ // initial configurations starrobot_microros_init();init_starrobotSTM_node();create_starrobotSTM_publisher();create_starrobotSTM_subscriber();// timer for publisherrcl_timer_t timer_pub;RCCHECK(rclc_timer_init_default(&timer_pub,&support,RCL_MS_TO_NS(5),publisher_callback));// create executorexecutor = rclc_executor_get_zero_initialized_executor();RCCHECK(rclc_executor_init(&executor, &support.context, 2, &allocator));RCCHECK(rclc_executor_add_timer(&executor, &timer_pub));RCCHECK(rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &subscription_callback, ON_NEW_DATA));// spin node by executor while(1){rcl_ret_t rc = rclc_executor_spin(&executor); //, RCL_MS_TO_NS(100)if (rc != RCL_RET_OK){break;}}// rclc_executor_fini(&executor);
}
该函数是整个节点的封装函数,包含了注册绑定硬件和创建发布、订阅节点。
大家下载demo包后,需要先在vscode中配置开发ARM的环境,然后make jflash进行编译下载即可;下载完成后打开ROS2端运行Agent 指令:<sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO serial --dev /dev/ttyUSB0 -v>,使用<ros2 node list> <ros2 topic list> <ros2 topic info /topic_name>查看发布的节点信息和数据。
相关demo代码下载地址:https://gitee.com/starRureole/starrobot_microros.git
如果大家有CSDN积分,想支持一下博主的,可以在CSDN上下载:https://download.csdn.net/download/qq_36349536/87500333
同时也欢迎大家进群一起交流学习:129923584
相关视频讲解链接:https://www.bilibili.com/video/BV1bD4y1g7V5/
博文使用的开发板购买链接:https://item.taobao.com/item.htm?spm=a1z10.1-c-s.w4004-21142386790.2.c0086177uv5IlA&id=606445592295
相关文章:
STM32 使用microros与ROS2通信
本文主要介绍如何在STM32中使用microros与ROS2进行通信,在ROS1中标准的库是rosserial,在ROS2中则是microros,目前网上的资料也有一部分了,但是都没有提供完整可验证的demo,本文将根据提供的demo一步步给大家进行演示。1、首先如果你用的不是S…...

51单片机入门 - 测试:SDCC / Keil C51 会让没有调用的函数参与编译吗?
Small Device C Compiler(SDCC)是一款免费 C 编译器,适用于 8 位微控制器。 不想看测试过程的话可以直接划到最下面看结论:) 关于软硬件环境的信息: Windows 10STC89C52RCSDCC (构建HEX文件&…...

【计算机网络】计算机网络
目录一、概述计算机网络体系结构二、应用层DNS应用文件传输应用DHCP 应用电子邮件应用Web应用当访问一个网页的时候,都会发生什么三、传输层UDP 和 TCP 的特点UDP 首部格式TCP 首部格式TCP 的三次握手TCP 的四次挥手TCP 流量控制TCP 拥塞控制三、网络层IP 数据报格式…...
【java web篇】项目管理构建工具Maven简介以及安装配置
📋 个人简介 💖 作者简介:大家好,我是阿牛,全栈领域优质创作者。😜📝 个人主页:馆主阿牛🔥🎉 支持我:点赞👍收藏⭐️留言Ὅ…...
springboot笔记
微服务架构 微服务是一种架构风格,开发构建应用的时候把应用的业务构建成一个个的小服务(这就类似于把我们的应用程序构建成了一个个小小的盒子,它们在一个大的容器中运行,这种一个个的小盒子我们把它叫做服务)&#…...
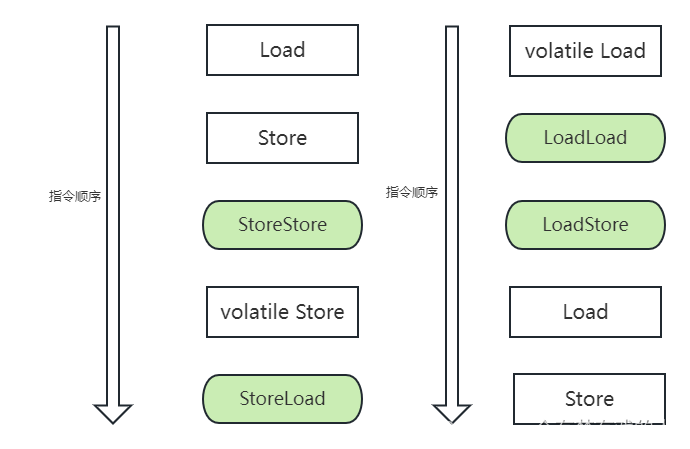
【多线程与高并发】- 浅谈volatile
浅谈volatile简介JMM概述volatile的特性1、可见性举个例子总结2、无法保证原子性举个例子分析使用volatile对原子性测试使用锁的机制总结3、禁止指令重排什么是指令重排序重排序怎么提高执行速度重排序的问题所在volatile禁止指令重排序内存屏障(Memory Barrier)作用volatile内…...
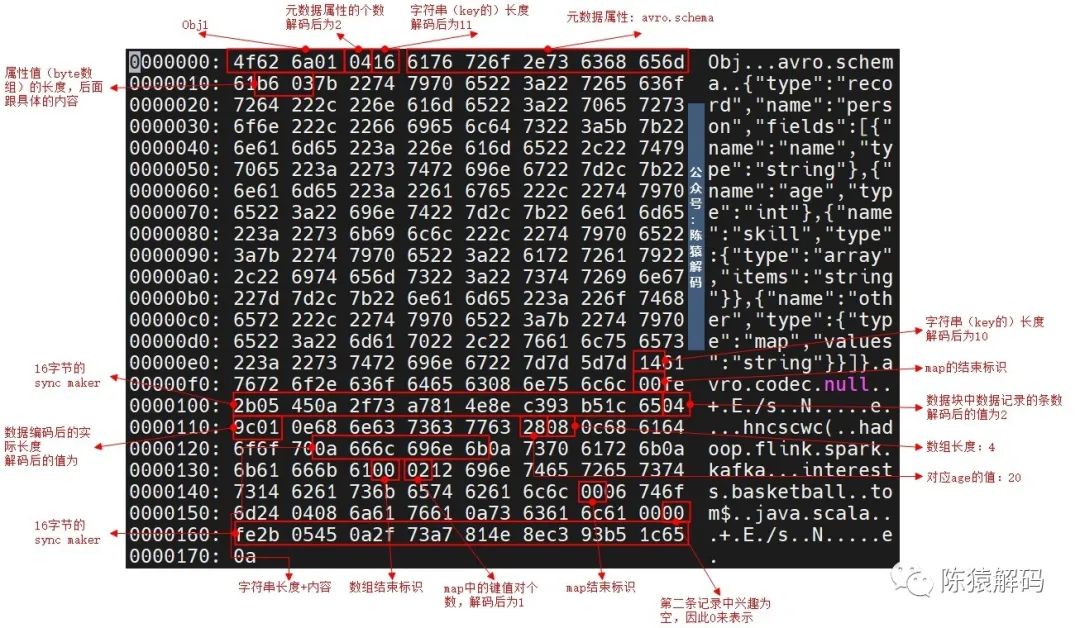
avro格式详解
【Avro介绍】Apache Avro是hadoop中的一个子项目,也是一个数据序列化系统,其数据最终以二进制格式,采用行式存储的方式进行存储。Avro提供了:丰富的数据结构可压缩、快速的二进制数据格式一个用来存储持久化数据的容器文件远程过程…...

【涨薪技术】0到1学会性能测试 —— LR录制回放事务检查点
前言 上一次推文我们分享了性能测试分类和应用领域,今天带大家学习性能测试工作原理、事务、检查点!后续文章都会系统分享干货,带大家从0到1学会性能测试,另外还有教程等同步资料,文末免费获取~ 01、LR工作原理 通常…...

卡尔曼滤波原理及代码实战
目录简介1.原理介绍场景假设(1).下一时刻的状态(2).增加系统的内部控制(3).考虑运动系统外部的影响(4).后验估计:预测结果与观测结果的融合卡尔曼增益K2.卡尔曼滤波计算过程(1).预测阶段(先验估计阶段)(2).更新阶段(后验估计阶段&…...
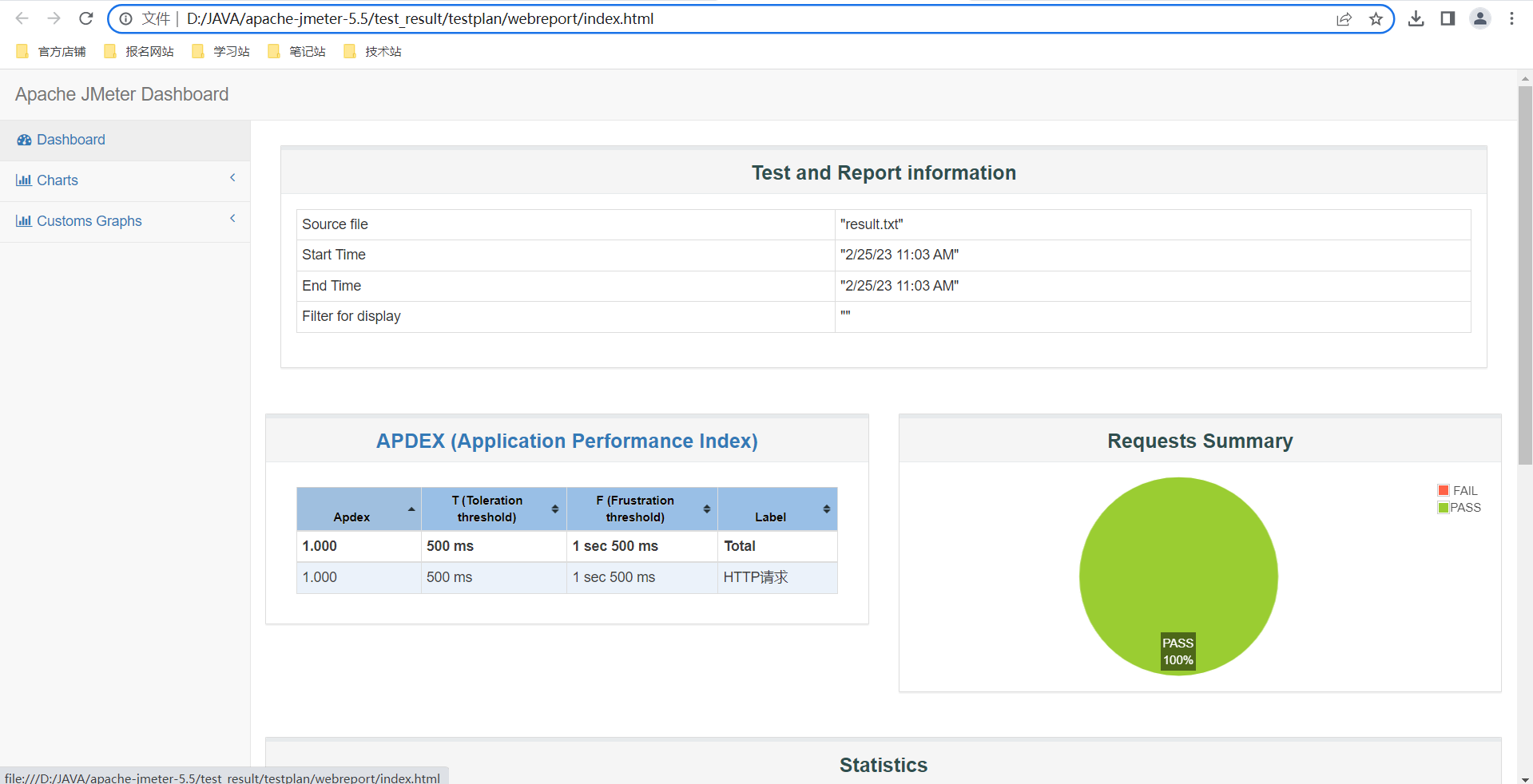
Jmeter使用教程
目录一,简介二,Jmeter安装1,下载2,安装三,创建测试1,创建线程组2,创建HTTP请求默认值3,创建HTTP请求4,添加HTTP请求头5,添加断言6,添加查看结果树…...

论文笔记|固定效应的解释和使用
DeHaan E. Using and interpreting fixed effects models[J]. Available at SSRN 3699777, 2021. 虽然固定效应在金融经济学研究中无处不在,但许多研究人员对作用的了解有限。这篇论文解释了固定效应如何消除遗漏变量偏差并影响标准误差,并讨论了使用固…...
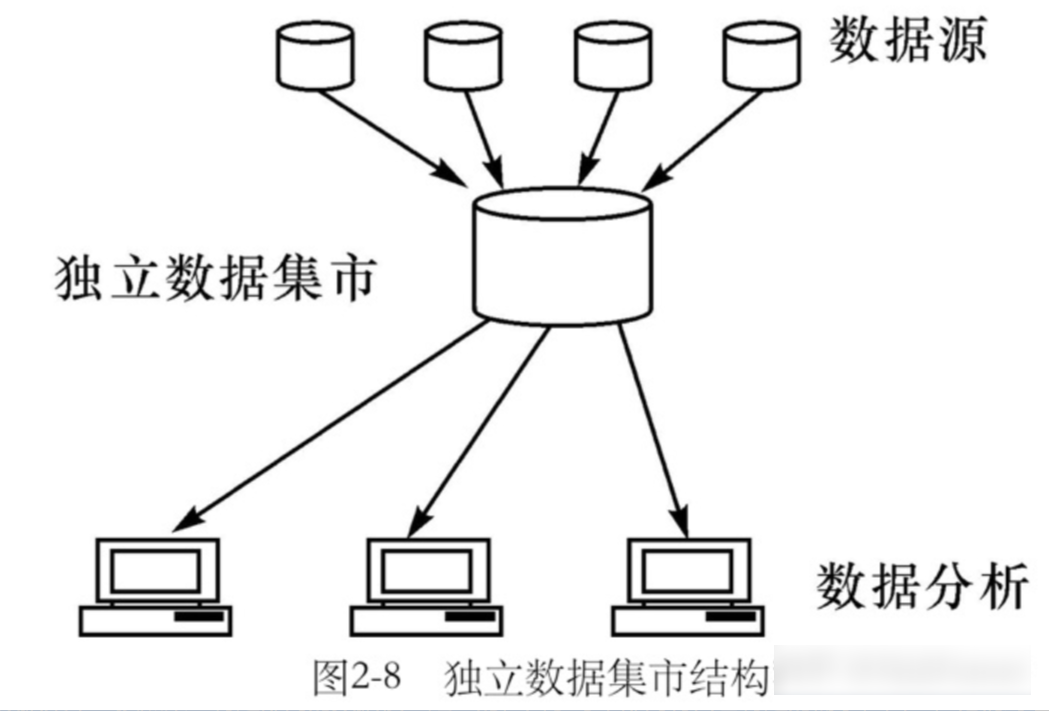
数据集市与数据仓库的区别
数据仓库是企业级的,能为整个企业各个部门的运作提供决策支持;而数据集市则是部门级的,一般只能为某个局部范围内的管理人员服务,因此也称之为部门级数据仓库。 1、两种数据集市结构 数据集市按数据的来源分为以下两种 &#x…...

Golang学习Day3
😋 大家好,我是YAy_17,是一枚爱好网安的小白。 本人水平有限,欢迎各位师傅指点,欢迎关注 😁,一起学习 💗 ,一起进步 ⭐ 。 ⭐ 此后如竟没有炬火,我便是唯一的…...
Python并发编程-事件驱动模型
一、事件驱动模型介绍 1、传统的编程模式 例如:线性模式大致流程 开始--->代码块A--->代码块B--->代码块C--->代码块D--->......---&…...
构建系统发育树简述
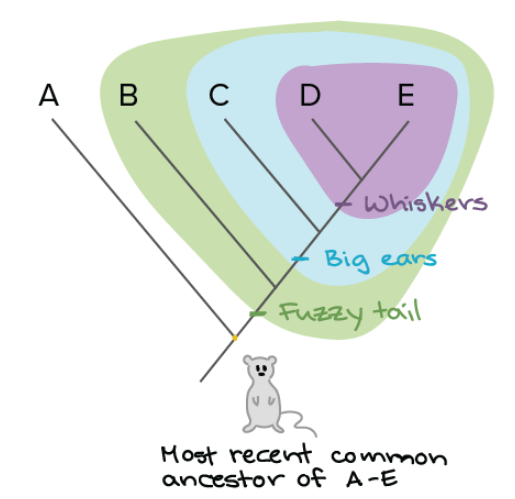
1. 要点 系统发育树代表了关于一组生物之间的进化关系的假设。可以使用物种或其他群体的形态学(体型)、生化、行为或分子特征来构建系统发育树。在构建树时,我们根据共享的派生特征(不同于该组祖先的特征)将物种组织成…...
这款 Python 调试神器推荐收藏
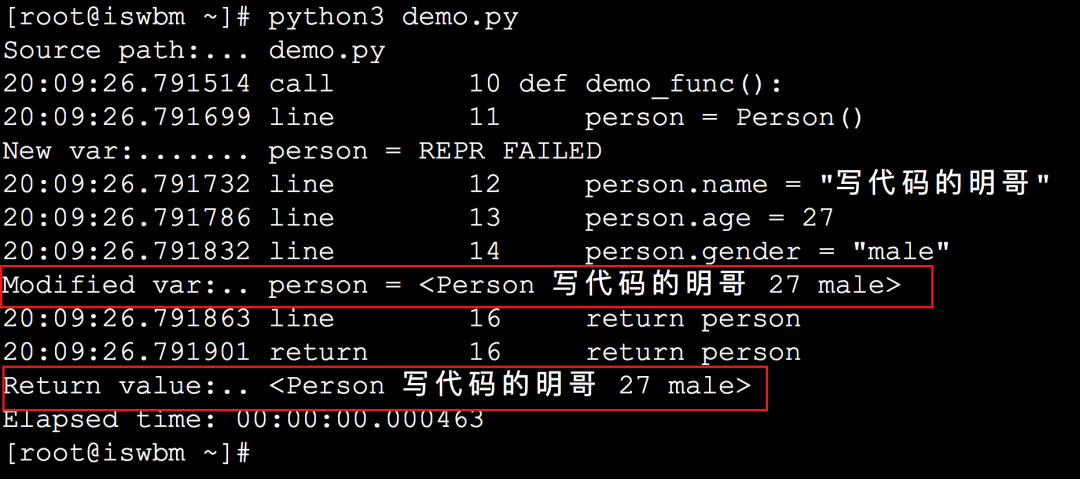
大家好,对于每个程序开发者来说,调试几乎是必备技能。 代码写到一半卡住了,不知道这个函数执行完的返回结果是怎样的?调试一下看看 代码运行到一半报错了,什么情况?怎么跟预期的不一样?调试一…...
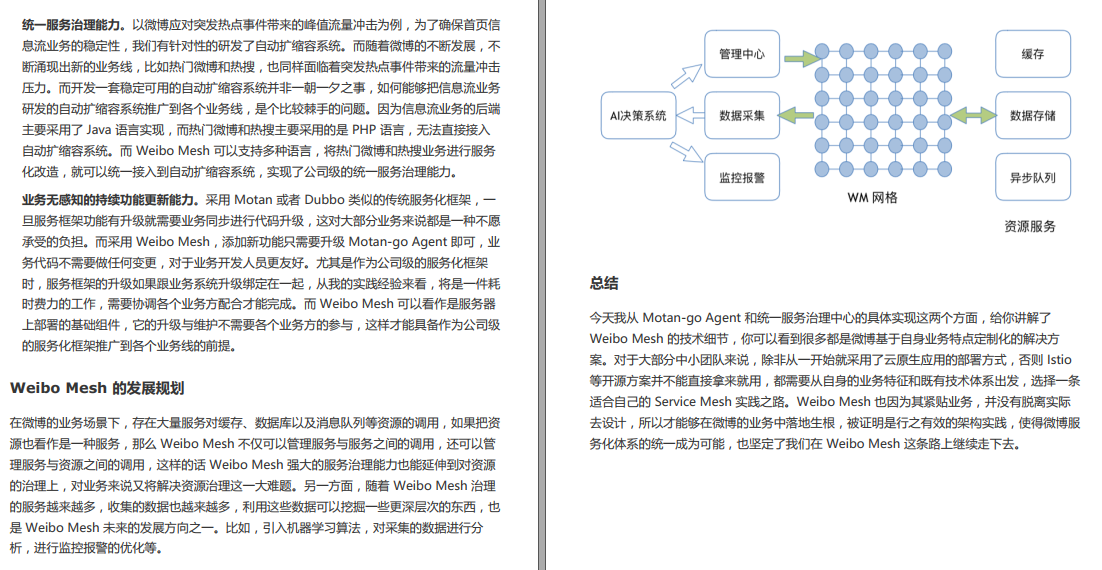
金三银四吃透这份微服务笔记,面试保准涨10K+
很多人对于微服务技术也都有着一些疑虑,比如: 微服务这技术虽然面试的时候总有人提,但作为一个开发,是不是和我关系不大?那不都是架构师的事吗?微服务不都是大厂在玩吗?我们这个业务体量用得着…...
构建matter over Thread的演示系统-efr32
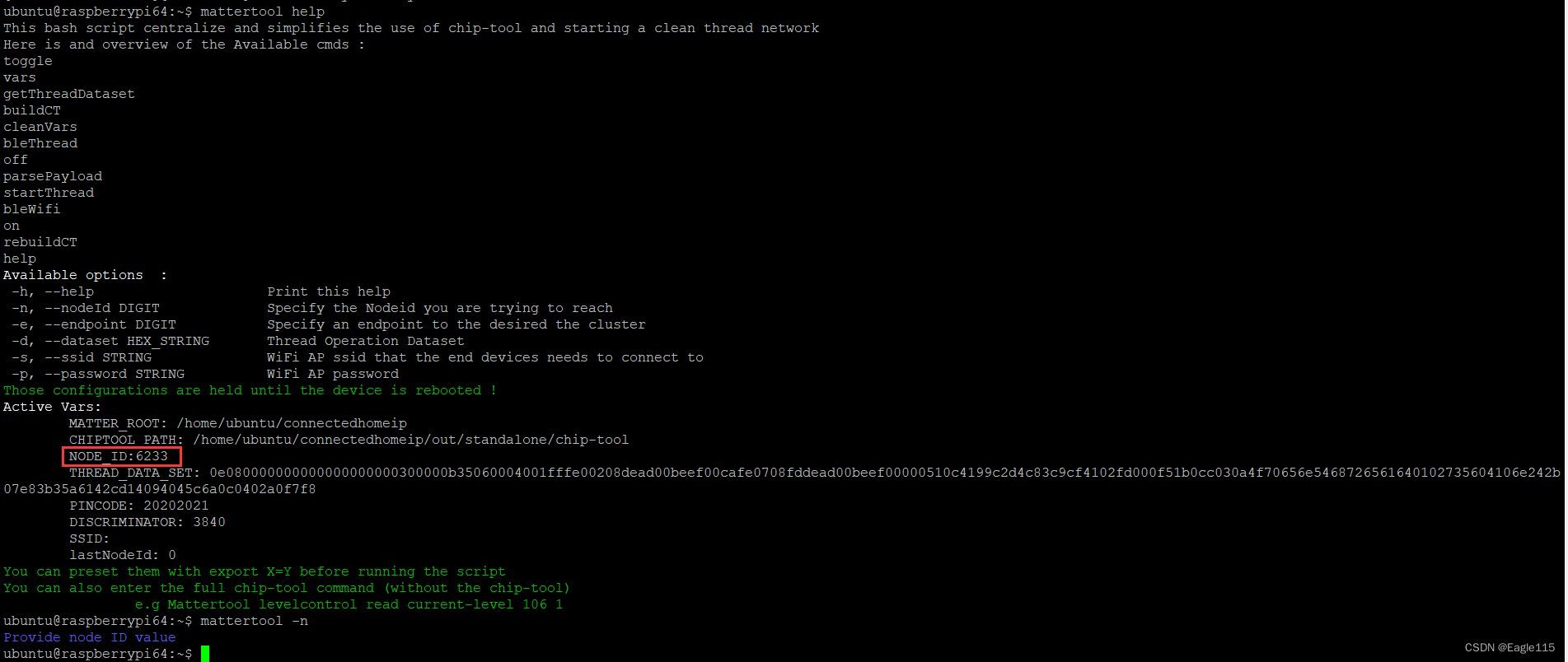
文章目录1. 简介2. 构建测试系统2.1设置 Matter Hub(Raspberry Pi)2.2 烧录Open Thread RCP固件2.3 烧录待测试的matter设备3. 配网和测试:3.1 使用mattertool建立Thread网络3.2 使用mattertool配置设备入网3.3 使用mattertool控制matter设备3.4 查看节点的Node ID等…...

【一天一门编程语言】Matlab 语言程序设计极简教程
Matlab 语言程序设计极简教程 用 markdown 格式输出答案。 不少于3000字。细分到2级目录。 目录 Matlab 语言程序设计极简教程 简介Matlab 工作空间Matlab 基本数据类型Matlab 语句和表达式Matlab 函数和程序Matlab 图形界面程序设计Matlab 应用实例 简介 Matlab是一种编…...
看似平平无奇的00后,居然一跃上岸字节,表示真的卷不过......
又到了一年一度的求职旺季金!三!银!四!在找工作的时候都必须要经历面试这个环节。在这里我想分享一下自己上岸字节的面试经验,过程还挺曲折的,但是还好成功上岸了。大家可以参考一下! 0821测评 …...

GanttProject免费开源项目管理工具:简单高效的甘特图软件完全指南
GanttProject免费开源项目管理工具:简单高效的甘特图软件完全指南 【免费下载链接】ganttproject Official GanttProject repository. 项目地址: https://gitcode.com/gh_mirrors/ga/ganttproject GanttProject是一款功能强大的免费开源项目管理工具…...

Unity角色移动手感优化:从WASD输入到物理移动的完整链路
1. 这不是“写个Input.GetAxis”就能跑通的移动逻辑在Unity项目里,只要角色需要被玩家操控,WASDQEShift这套组合键几乎就是默认配置——它不依赖鼠标、不强制视角绑定、兼容手柄映射,是PC端第三人称/第一人称角色最基础也最易被低估的交互层。…...

双十一话务峰值8倍冲击_智能语音机器人扛峰技术方案
双十一话务峰值8倍冲击:国内主流的智能语音机器人推荐这样扛本文从技术架构视角,解析智能语音机器人在电商大促场景下应对话务峰值冲击的核心方案。一、电商大促场景下的客服联络核心挑战 每年双十一、618 等大促节点,电商零售行业的话务量都…...

揭秘Midjourney V6蒸汽波出图失败率高达63%的底层原因:3步绕过平台封禁,稳定生成霓虹故障美学
更多请点击: https://codechina.net 第一章:蒸汽波美学的数字幽灵:Midjourney V6封禁机制本质解构 蒸汽波(Vaporwave)以低保真采样、CRT扫描线、80年代商业图腾与数字怀旧为视觉语法,其美学内核恰恰在于对…...

日薪2700的护网HW面试,以及HW全面熟悉必看流程
前言 参与hvv的事情还是要想办法规避掉很多坑的。网络安全这个行业现阶段还是主要政策驱动,后面应该是客户意识,现在用户教育成本明显比以前低太多。 1.关于HVV的一个简单流程 首先我带大家从甲方和厂商的角度来分解一下整个护网流程的核心逻辑 第一阶段…...

2026 最新 Web 安全入门教程 零基础全面吃透 Web 攻防
“未知攻,焉知防”——真正的安全始于理解攻击者的思维 在日益数字化的世界中,Web安全工程师已成为企业防护体系的“数字盾牌”。本文将提供一条清晰的进阶路径,助你在2025年的网络安全领域脱颖而出。 一、认知篇:理解安全本质 …...

SABIC塑料解决方案:宏裕塑胶全面代理原GE塑料高性能材料产品
宏裕塑胶依托源头直采优势整合沙伯基础创新SABIC等国际品牌资源,为制造业客户提供高性价比通用工程塑料原料及全流程技术支撑,助力企业降本增效。其代理产品涵盖PETG、PCTG、PBT、TPEE等全品类工程塑料,专为塑胶制品厂、汽车零部件厂等客户群…...

从零搭建 Geo 开源项目源码开发环境——以 GeoServer 为例
在地理信息(GIS)与空间数据服务开发中,Geo 系开源项目(如 GeoServer、GeoPandas、GeoDjango 等)非常常见。很多团队后期都会走到“读源码 / 改源码 / 二次开发”这一步,而第一步往往是:把源码跑…...

影刀RPA跨境店群运营架构:TikTok Shop多节点高并发调度与Python环境隔离实战
大家好,我是林焱。 太有意思了,刚刷朋友圈,看到一个在跨境圈子里被疯狂转发的消息。 有几个当年和我一样,在南充念工程测量技术出身的 00 后学弟,最近跑回母校干了件特别硬核的事。 他们没有像传统的成功校友那样&a…...

SSH密钥不能直接访问phpMyAdmin:正确使用隧道方案
1. 这个标题里藏着三个根本性误解,先说清楚再动手 “如何安全的使用ssh秘钥访问phpmyadmin”——这句话本身就是一个典型的认知错位组合。我第一次在客户现场看到这个需求时,花了一整个下午才把技术逻辑理顺。 phpMyAdmin 本质上是一个运行在 Web 服务器…...