论文阅读:Image-to-Lidar Self-Supervised Distillation for Autonomous Driving Data
目录
摘要
Motivation
整体架构流程
技术细节
雷达和图像数据的同步
小结
论文地址: [2203.16258] Image-to-Lidar Self-Supervised Distillation for Autonomous Driving Data (arxiv.org)
论文代码:GitHub - valeoai/SLidR: Official PyTorch implementation of "Image-to-Lidar Self-Supervised Distillation for Autonomous Driving Data"
摘要
自动驾驶汽车的图像到雷达自我监督蒸馏。
在自动驾驶中两项重要任务:分割或检测稀疏激光雷达点云目标(使车辆在3D环境中安全运行)。在3D语义分割或目标检测中,性能最好的方法依赖于大量带标注数据(注释3D激光雷达数据既复杂又昂贵)。 论文提出一种自监督预训练方法,适用于自动驾驶数据的3D感知模型。即,利用自动驾驶设备中同步和校准的图像和激光雷达传感器的可用性,将自监督的预训练图像表征蒸馏到3D模型中(不需要任何点云或图像标注)。
方法关键是使用超像素(superpixel),用于在视觉相似区域中池化3D点特征和2D像素特征,然后训练一个3D网络进行自监督任务,再匹配池化点特征与相应的池化图像像素特征。通过超像素获得的对比区域优势在于:
- 将视觉上相干区域的像素和点组合在一起,可以产生更具意义的对比任务,从而产生非常适合3D语义分割和3D目标检测的特征;
- 所有不同区域在对比损失中权重相同,与这些区域中采样的3D点数量无关;
- 减轻由于不同传感器之间遮挡而导致的点和像素不正确匹配所产生的噪声。在自动驾驶数据集上的大量实验表明,我们的图像到激光雷达蒸馏策略能够产生良好的语义分割和目标检测任务的3D表征。
Motivation
- 对三维激光雷达点云进行标注是一项耗时耗力的任务;
- 目前的SSL方法多适用于室内密集点云,如PointContrast;
- 自动驾驶汽车装置中同步和校准的多模态数据的可用性。
整体架构流程
利用自动驾驶汽车的同步和校准的摄像头和激光雷达传感器将自我监督的预训练图像表示提取到3D网络中。这个3D网络就是实际需要得到的表征,可以很好地转移到2D中各种复杂的下游任务中,通常超过监督预训练(实现无需标注和少量标注)。即,自我监督的2D到3D表征蒸馏,SLidR。SLidR 将预训练和固定 2D 网络的知识提炼成一个 3D 网络。它使用超像素将视觉上相似区域的特征汇集在一起,无论是在图像上,还是在通过超像素反投影的点云上。超像素驱动的对比损失对齐池化点和图像特征。如图所示:
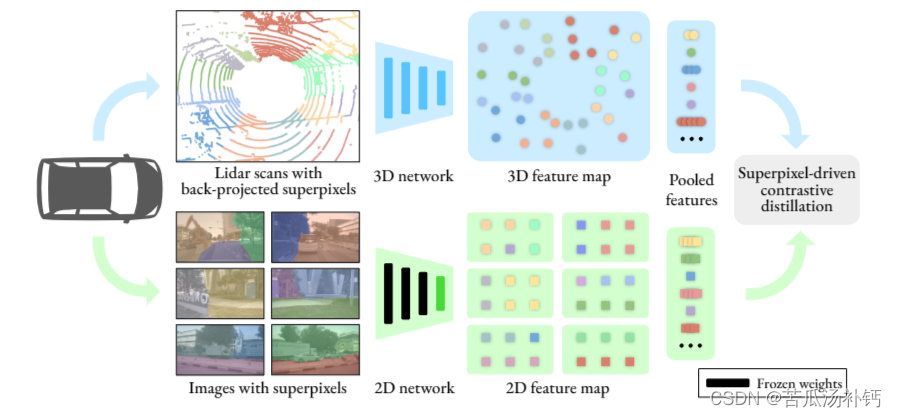
对雷达数据和相机的图像数据进行超像素分割得到超像素,经过点云到图像的一个反投影可以得到点与像素的映射关系,且得到superpoint与superpixel对应关系,然后图像数据经过预训练的2D网络再经过一个project head与雷达数据经过3D网络,再经过一个projection head,这样得到的就是相同维度的特征,再经过一个平均池化,就可以进行对比损失优化。(来自于:[论文阅读] Image-to-Lidar Self-Supervised Distillation for Autonomous Driving Data - 知乎 (zhihu.com))
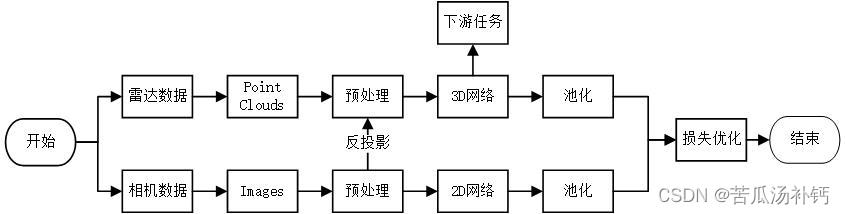
流程如下图所示,图像经过超像素分割得到超像素,且反投影到点云上,然后图像经过2D网络(先经过预训练网络再经过一个projection head),然后进行池化;点云数据经过3D网络(先预训练然后经过一个projection head),然后进行池化。这个时候就得到superpixel特征和superpoint特征,然后计算损失loss,匹配superpoint与其对应的superpixel,从而联合训练3D网络和两个head的参数。3D网络的backbone用于迁移到下游任务。
技术细节
雷达和图像数据的同步
对于某一个场景的t0时刻获取得到的点云数据:
![]()
与之对应的 一个相机获取得到图像数据:
![]()
通过一个mapping公式进行同步:

小结
提出基于超像素(superpixel)到超点(superpoint)的对比损失和精心设计的图像特征上采样架构(即将strided convolution替换为dilated convolution)的自监督2D-3D表示蒸馏,该方法允许在不改变网络结构以及不影响结果的情况下提取高分辨率图像特征。这种方法称为SLidR,Superpixel-driven Lidar Representations。这是一种自我监督的图像到图像到 Lidar 蒸馏方法,用于处理同步激光雷达和相机数据,通常在应用于自动驾驶。SLidR 产生了强大的点云表示,这些表示可以很好地转移到多个任务和数据集上,超过了相关的最先进方法。
首次面向自动驾驶数据的自监督图像到激光雷达的表示蒸馏问题的研究。在论文选取评估设置中,image-to-Lidar pre-training strategy超过了SOTA的3D self-supervised pre-training方法和2D-to-3D distillation方法(设计用于捕捉室内场景中的密集点云)。
相关文章:
论文阅读:Image-to-Lidar Self-Supervised Distillation for Autonomous Driving Data
目录 摘要 Motivation 整体架构流程 技术细节 雷达和图像数据的同步 小结 论文地址: [2203.16258] Image-to-Lidar Self-Supervised Distillation for Autonomous Driving Data (arxiv.org) 论文代码:GitHub - valeoai/SLidR: Official PyTorch implementati…...

前端版本控制工具,常见的Git 和SVN
目录 前言GitGit简介Git的优势Git常用指令常见的Git服务 SVN (Subversion)SVN简介SVN的优势SVN常用指令SVN与Git的区别 👍 点赞,你的认可是我创作的动力! ⭐️ 收藏,你的青睐是我努力的方向! ✏️ 评论,你…...
C++ —— Tinyxml2在Vs2017下相关使用2(较文1更复杂,附源码)
相关链接 C —— Tinyxml2在Vs2017下相关使用1(附源码) tinyxml2简介 TinyXML2是一个简单,小巧,高效,CXML解析器,可以很容易地集成到其他程序中。TinyXML-2解析一个XML文档,并从中构建一个 可以…...

阿里内推强推的并发编程学习笔记,原理+实战+面试题,面面俱到!
并发编程 谈到并发编程,可能很多人都有过经验,甚至比我了解的更多。 那么并发与并行的区别又是什么? 并发编程是编程中的核心问题,实践中,当人们希望利用计算机处理一些现实世界问题,以及希望同时处理多…...

域名注册查询流程
域名注册查询怎么查域名是否被注册?域名注册查询如何查域名的过期时间和注册商?域名注册查询用什么工具?下面是关于域名注册查询流程介绍。 1、域名注册查询可以用什么工具? 这里可以使用聚查工具,聚查包括:whois 查询、建站历史查询、反链查询、P…...
【Linux学习笔记】代码编辑工具vim
1. vim工具基本模式的转换2. vim命令模式下的各种编辑命令2.1. 光标行定位2.2. 光标自由定位2.3. 复制粘贴2.4. 删除2.5. 文本的大小写替换2.6. 文本的替换2.7. 文本的前删后删2.8. 撤销操作 3. vim底行模式下的命令3.1. 设置行号与取消设置行号3.2. 分屏操作3.3. 在不退出vim的…...

Android Boring SSL
前期设置 SSLContext.getInstance(“TLS”)SSLContext.init()SSLContext.getSocketFactory()SSLSocketFactory.createSocket()NativeSsl.newInstance()BioWrapper 的创建ConscryptEngineSocket.startHandshake() TLS协商 state_start_connect(TLS)state_enter_early_data(TLS)s…...

中国人民大学与加拿大女王大学金融硕士项目:开启你的金融精英之路
在全球化的今天,金融行业的发展日新月异,对金融人才的需求也日益增长。为了满足这一需求,中国人民大学与加拿大女王大学联合推出了金融硕士项目,旨在培养具有国际视野、专业素养和创新能力的金融精英。 这一开创性的项目将两大世…...

HashSet编程小案例,控制生日和姓名。重写HashCode
Java编程: 定义员工Employee类,该类包含:private成员属性name,sal,birthday(MyDate类型), 其中birthday为MyDate类型(属性包括:year,month,day), 要求&…...
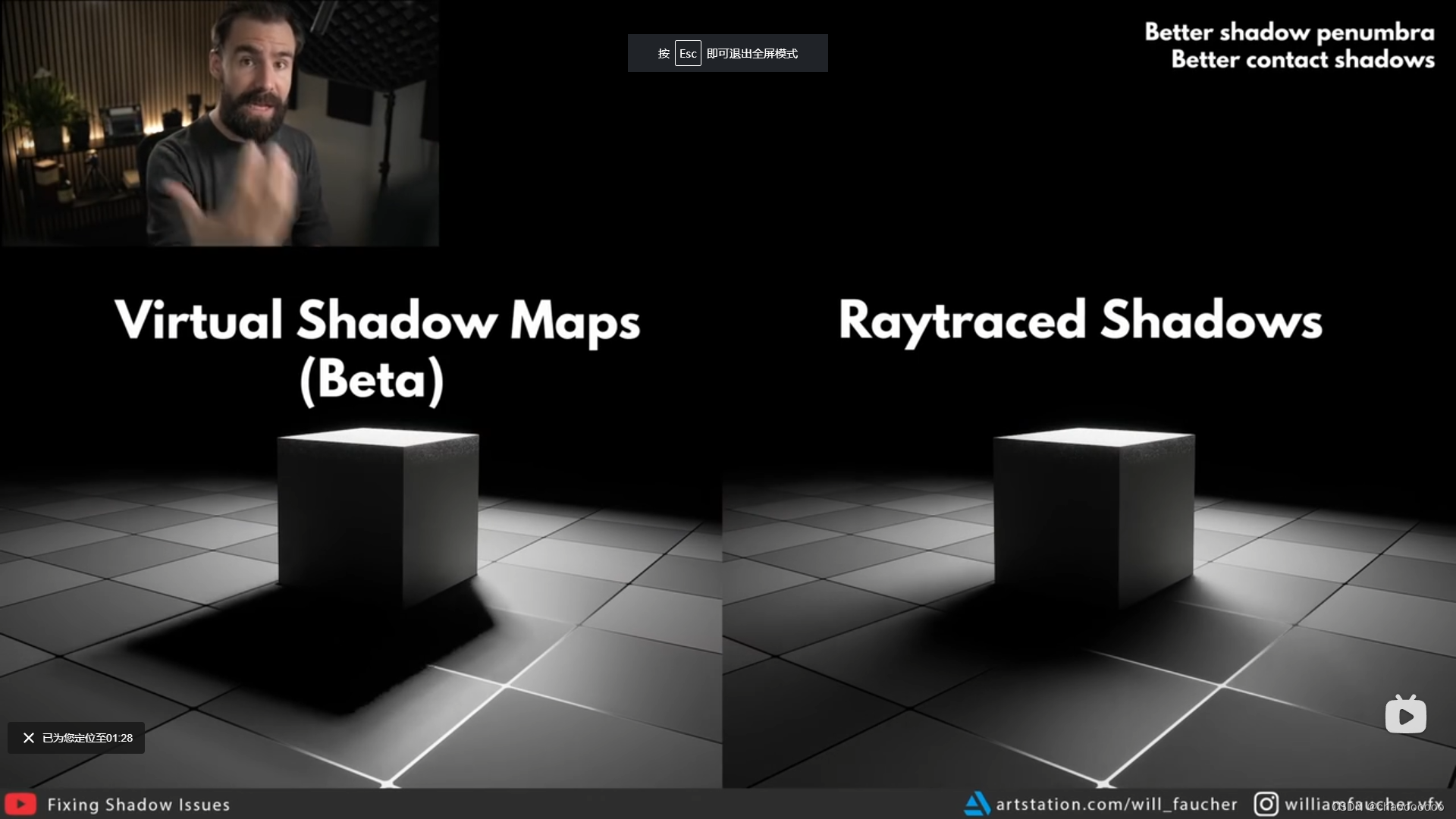
虚幻阴影整理
虚拟阴影贴图(VSM)是一种全新的阴影贴图方法,可以提供稳定的高分辨率阴影。通过与虚幻引擎5的Nanite虚拟几何体、Lumen全局光照和反射以及世界分区功能结合使用,它能够实现电影级的品质效果,为大型开放场景提供光照。 …...

MySQL数据库(一)
数据库 —— 基础 1. 数据库 DataBase 数据库管理系统 2. SQL语言2.1 DDL数据定义语言2.1.1 数据库基础操作2.1.2 数据表基础操作2.1.3 字段基础操作 2.2 DML表记录管理2.2.1 插入数据INSERT2.2.2 更新数据UPDATE2.2.3 删除数据DELETE 3. SQL数据类型3.1 数值类型3.1.1 整数类型…...
C++11 新特性
C11 新特性 C11 新特性统一的列表初始化声明auto 关键字decltype 关键字nullptr 关键字 关键字 using使用 using 在子类中引用基类的成员使用 using 关键字定义类型别名 范围-based for 循环右值引用和移动语义左值引用和右值引用右值引用使用场景和意义完美转发 lambda表达式移…...

排查手机应用app微信登录问题不跳转失败原因汇总及其解决方案
经过最近我发的文章,我个人觉得解决了不少小问题,因为最近很小白的问题已经没有人私聊问我了,我总结了一下排查手机应用app微信登录问题不跳转失败的原因汇总及其解决方案在这篇文章中,分析微信登录不跳转的原因,并提供解决方案。希望通过这篇文章,能够帮助大家顺利解决这…...
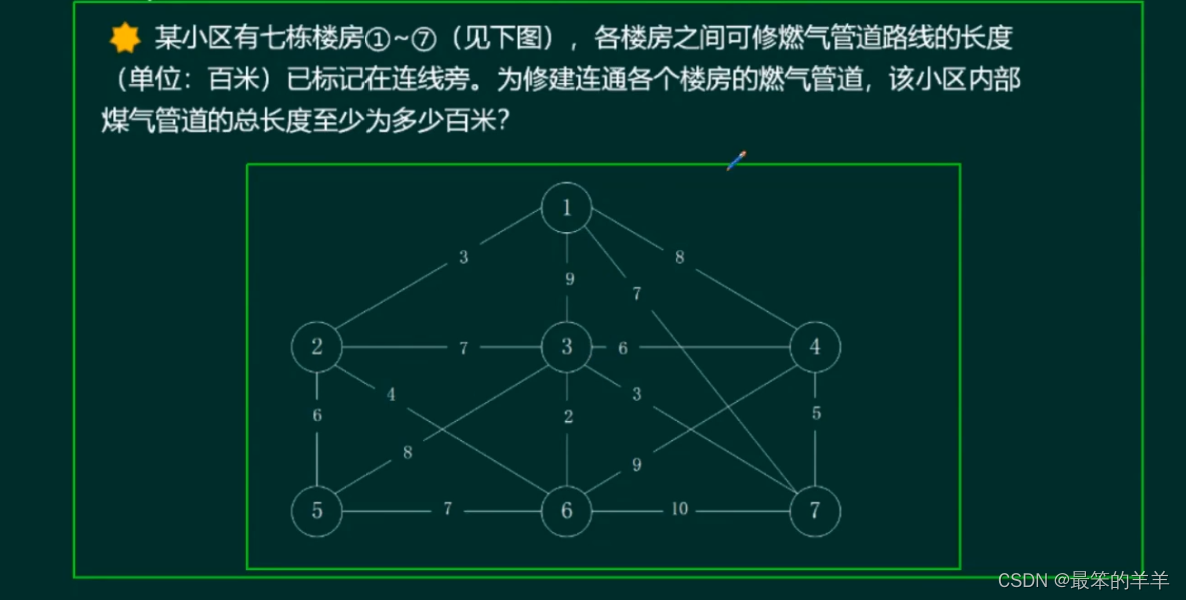
软考高级系统架构设计师系列之:数学与经济管理
软考高级系统架构设计师系列之:数学与经济管理 一、数学与经济管理二、图论应用-最小生成树三、图论应用-最短路径四、图论应用-网络与最大流量五、运筹方法-线性规划六、运筹方法-动态规划七、运筹方法-转移矩阵八、运筹方法-排队论九、运筹方法-决策-不确定决策十、运筹方法…...
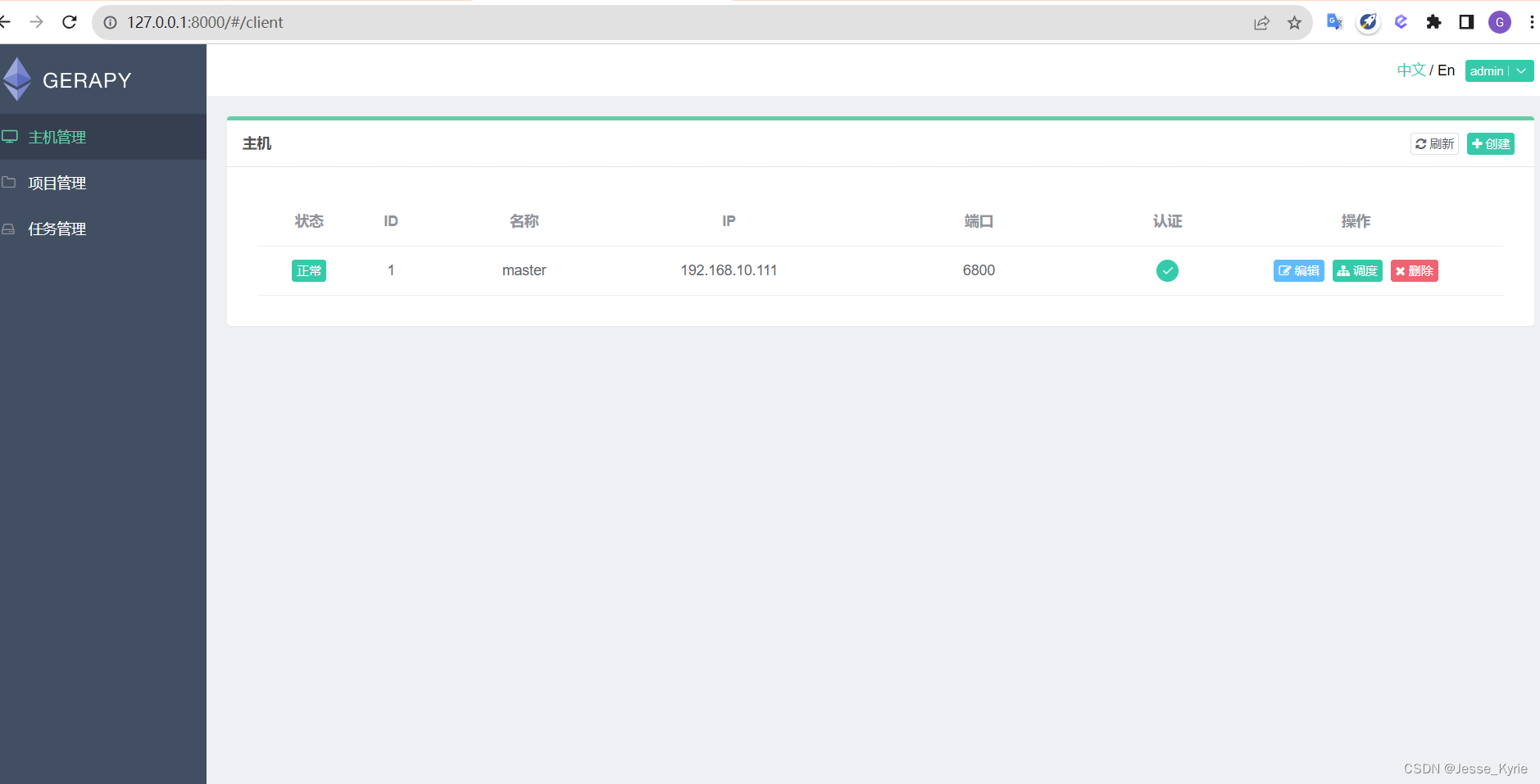
基于Scrapyd与Gerapy部署scrapy爬虫方案【可用于分布式爬虫部署】
scrapyd部署爬虫 Scrapyd 是一个基于 Scrapy 的开源项目,它提供了一个简单的方式来部署、运行和监控 Scrapy 爬虫。它是一个用于集成 Scrapy 爬虫到分布式架构中的工具,允许您在分布式环境中运行爬虫,并提供了一组 Web API,用于管…...
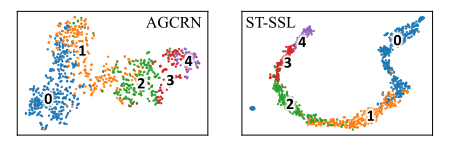
ST-SSL:基于自监督学习的交通流预测模型
文章信息 文章题为“Spatio-Temporal Self-Supervised Learning for Traffic Flow Prediction”,是一篇发表于The Thirty-Seventh AAAI Conference on Artificial Intelligence (AAAI-23)的一篇论文。该论文主要针对交通流预测任务,结合自监督学习&#…...

如何处理C++中的字符串编码和国际化?
在C中处理字符串编码和国际化的常用方式如下: 字符串编码: 使用UTF-8编码:UTF-8是一种可变字节长度的编码方式,广泛用于表示 Unicode 字符。C中的字符串类型std::string默认使用的是UTF-8编码。可以通过使用宽字符类型std::wstrin…...
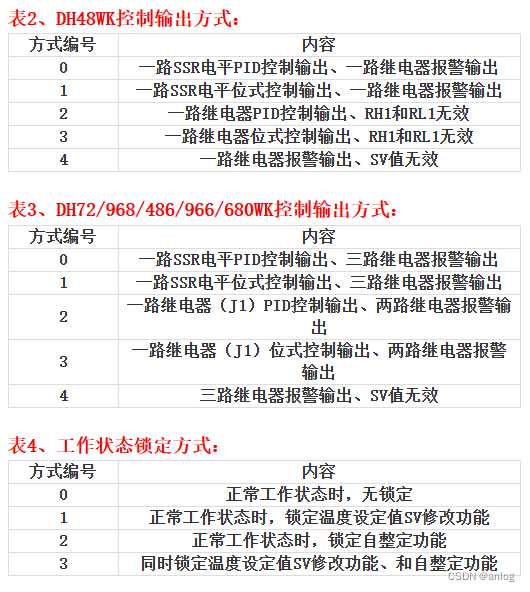
DH48WK 温控器参数设置
北京东昊力伟科技有限责任公司 温控仪、温度控制器 产品特点: 可外接温度传感器Pt100、Cu50、K、E、J、N、T、R、S、B兼容输入;PID控制输出、位式控制输出、继电器报警输出;控温能满足设定温度值的0.2℃;既可用于加热控制、也可…...
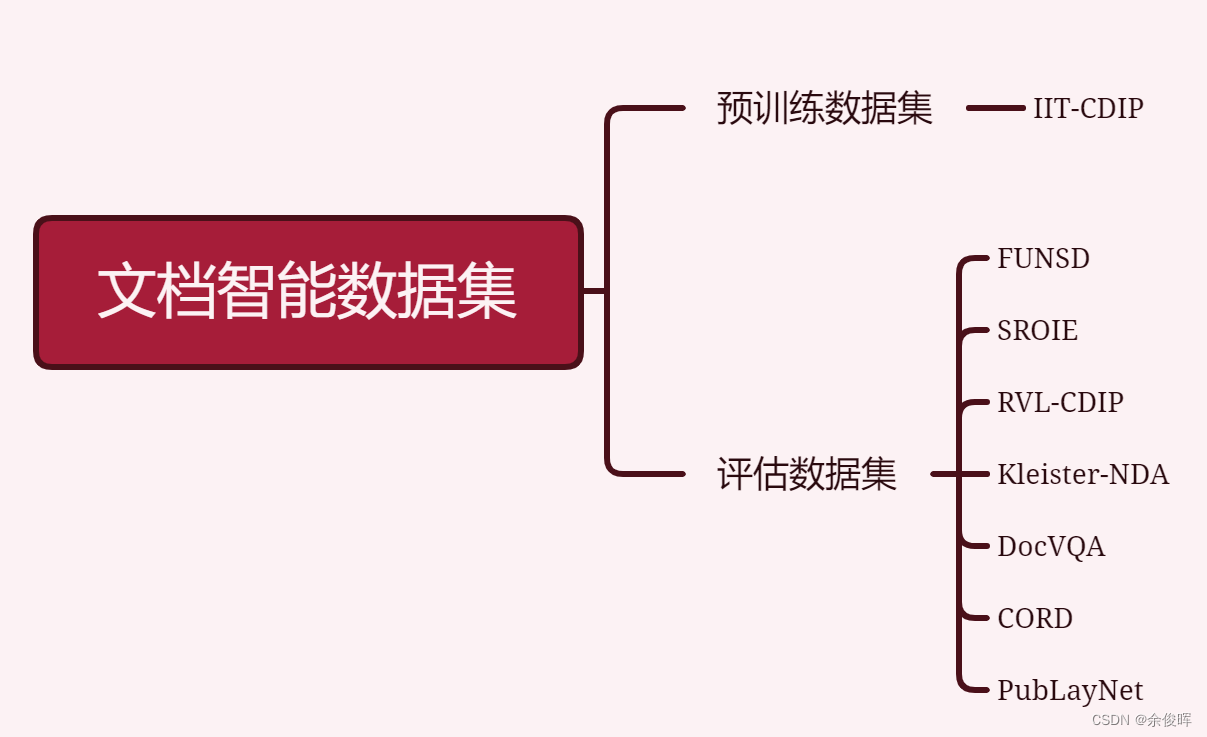
【文档智能】多模态预训练模型及相关数据集汇总
前言 大模型时代,在现实场景中或者企业私域数据中,大多数数据都以文档的形式存在,如何更好的解析获取文档数据显得尤为重要。文档智能也从以前的目标检测(版面分析)阶段转向多模态预训练阶段,本文将介绍目…...
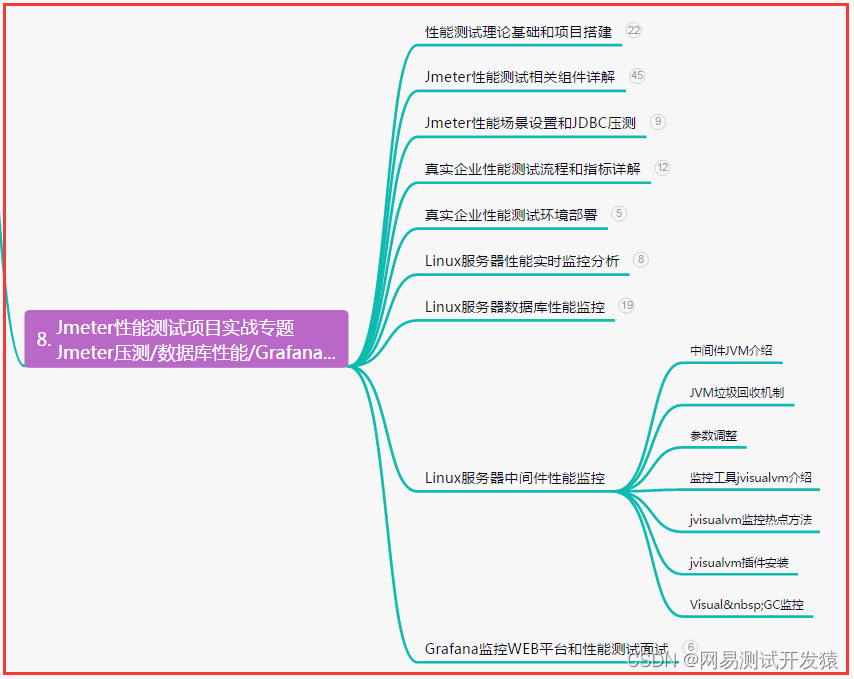
超全整理,性能测试——数据库索引问题定位+分析(详细)
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 1、数据库服务器添…...

GTA5线上小助手:终极免费工具让你的洛圣都之旅更精彩
GTA5线上小助手:终极免费工具让你的洛圣都之旅更精彩 【免费下载链接】GTA5OnlineTools GTA5线上小助手 项目地址: https://gitcode.com/gh_mirrors/gt/GTA5OnlineTools 还在为GTA5线上模式中繁琐的操作而烦恼吗?想要更轻松地管理游戏数据、快速到…...

卡片里放图片?用 memory:// 协议才是正确打开方式
文章目录卡片图片的限制项目结构卡片 UI:用 memory:// 显示图片FormAbility:下载图片 → 写入共享内存 → 推送更新显示本地图片(无需下载)memory:// 协议原理关键注意事项写在最后卡片里显示图片这件事比我想象的要麻烦一点。卡片…...

深度学习立体匹配:从MC-CNN架构解析到工程实践优化
1. 项目概述:从传统到深度,立体匹配的范式革新在计算机视觉领域,立体匹配是一个经典且核心的问题,它的目标是从一对经过校正的左右图像中,为每个像素找到其在另一幅图像中的对应点,从而计算出场景的深度信息…...

基于LLM的智能网页自动化:从意图理解到工程实践
1. 项目概述:当AI学会“看”和“点”,自动化进入新阶段如果你还在为那些需要手动点击、填写表单、抓取数据的重复性网页任务感到头疼,那么browser-use这个项目可能会让你眼前一亮。简单来说,它不是一个普通的浏览器自动化工具&…...

基于Git与Zenn的内容管理方案:打造高效技术写作工作流
1. 项目概述:一个内容创作者的知识管理中枢 最近在技术社区里,看到不少朋友在讨论如何高效地管理自己的技术笔记、博客草稿和项目文档。我自己也在这个问题上摸索了很久,直到我遇到了一个名为 seiryuu1215/zenn-content 的GitHub仓库。这不…...

在Windows上轻松安装APK文件:APK Installer完全指南
在Windows上轻松安装APK文件:APK Installer完全指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾想过在Windows电脑上直接运行Android应用&…...

JUCE框架移植MDA经典音频插件:从VST2到现代跨平台开发实践
1. 项目概述:JUCE框架下的MDA插件遗产如果你在音频插件开发领域摸爬滚打过一段时间,尤其是对开源社区有所关注,那么“mda-plugins-juce”这个名字大概率会唤起你的一些记忆。这个由hollance维护的GitHub仓库,本质上是一个“移植”…...

终极指南:在Windows上直接安装安卓APK的3大优势与6个实用技巧
终极指南:在Windows上直接安装安卓APK的3大优势与6个实用技巧 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer APK Installer是一款专为Windows系统设计的安…...
)
Shell 相关基础入门,在 Ubuntu 与 CentOS Shell 中的语法差异总结(bash、dash、sh)
新建的test.sh文件,vim进去,每行开头都默认有一个~符号,是什么意思,而且在里面鼠标也失效了? 你问的这两个问题,恰好是初学者刚接触 vim 编辑器时最常遇到的两个困惑。它们完全正常,不是系统出错…...

2026年IPA防破解安全加固公司怎么选?这份iOS加固服务商横向对比清单请收好
当你的iOS应用核心代码被逆向、商业逻辑被剽窃、盗版版本在分发平台泛滥时,寻找一家靠谱的IPA防破解安全加固公司就成了技术负责人的当务之急。但面对市面上众多服务商,如何判断哪家方案真正有效,且不影响App Store过审?本文基于多…...