[AUTOSAR][诊断管理][ECU][$19] 读取ECU的DTC故障信息
一、简介
- 在车载诊断中常用的诊断协议有ISO 14229等,在协议中主要定义了诊断请求、诊断响应的报文格式及ECU该如何处理诊断请求的应用。
- 其中ISO 14229系列标准协议定义了用于行业内诊断通信的需求规范,也就是UDS。UDS主要应用于OSI七层模型的第七层——应用层,它支持的汽车总线包括:CAN、LIN、FlexRay、Ethernet及K-LINE。
- UDS中的服务根据其功能分为6大类,共26种。其中包含的0x19服务(ReadDTCInformation)则是UDS中的重中之重。那么我们今天就一起进入到19服务中,感受其中的奥秘。
二、 服务介绍
19服务(ReadDTCInformation)用于读取ECU的DTC故障信息,此服务允许客户端从服务器读取诊断故障代码(DTC)的相关信息。此服务包含28个子服务(Subfunction),常用的5种子服务如下:
- 0x01 reportNumberOfDTCByStatusMask(读取客户端定义状态掩码匹配的DTC数量)
- 0x02 reportDTCByStatusMask(读取客户端定义状态掩码匹配的DTC)
- 0x04 reportDTCSnapshotRecordByDTCNumber(检索客户端定义DTC掩码的快照数据)
- 0x06 reportDTCExtDataRecordByDTCNumber(读取某个DTC及其相关的扩展数据,扩展数据包括DTC状态,优先级,发生次数,时间戳,里程等。)
- 0x0A reportSupportedDTC(读取ECU支持的所有DTC的状态,包含支持的各个DTC编号以及相关状态)
今天主要解析19服务中的04子服务,也就是检索客户端定义DTC的快照号对应的快照记录数据,在AUTOSAR中也叫冻结帧。
(1)子服务介绍
-
快照数据概念介绍
前面讲19服务常用子服务的时候,提到了Subfunction为04的子服务,使用04子服务对服务端进行请求,可以获取DTC发生时记录的快照数据。那04子服务是如何获取快照数据的呢?首先我们需要理解什么是快照数据。从ISO 14229-1协议可知,快照数据为发生某一故障时记录的DTC的电压、发动机转速、时间戳等,从而使工程师在ECU出现故障时能及时了解车辆的历史和实时故障信息。 -
报文格式介绍
接下来通过介绍19 04子服务请求和响应的报文格式,分析报文中各个字节的相关定义。
请求格式

从图1中可知,19 04的请求报文包括四个部分,其中服务ID和Subfunction就不用过多解释了。DTCMaskRecord表示某个故障的DTC,当系统检测到一个故障发生时,则会存储其对应的故障数值,这个故障数值就是DTC。通过读取DTC可知一个故障发生时的具体位置以及原因和类型。通常UDS中DTC占3个字节,OBD Ⅱ占2个字节,在ISO 15031-6中定义的DTC由两个字节根基和一个字节的故障类型组成。我们通常用到的DTC格式都是由ISO 15031-6中定义的。图2是ISO 15031-6中定义的DTC的两个字节根基,图中很详细地解释了每一个Bit的含义。

SnapshotRecordNumber需要提前定义,可以有多个。如SnapshotRecordNumber设置为FF,则表示读取所有的快照数据组。
响应格式

图3为响应报文格式,当使用19 04对ECU进行请求时,ECU给出的肯定响应的报文格式由七部分组成。此时的DTCAndStatusRecord由三个字节的DTC和一个字节的StatusOfDTC组成,StatusOfDTC表示DTC的状态。假设现在的DTC状态为0x09,则Bit0和Bit3置1。如某个DTC一直存在并且确认,则在ECU响应的报文中的StatusOfDTC为0x09。如图4

SnapshotRecordNumber这个字节表示DTC快照记录的组号;DTCSnapshotRecordNumberOfldentifiers表示快照DID的个数,占一个字节;Dataldentifier这部分由两个字节组成,表示快照数据对应的DID,DTCSnapshotRecord表示快照DID对应的具体数据。
三、示例代码
(1)19_read_dtc_info.c
/********************************************************************************
* @file 19_read_dtc_info.c
* @author jianqiang.xue
* @version V1.0.0
* @date 2023-05-30
* @brief 读取DTC信息
********************************************************************************/
/* Includes ------------------------------------------------------------------*/
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
#include <stdlib.h>
#include "modules.h"
#include "os_api.h"
#include "edebug.h"
#include "kv_sys.h"
#include "ecu_ble_uart.h"
/* Private includes ----------------------------------------------------------*/
#include "std_math.h"
#include "app_can.h"
#include "can_nm.h"
#include "app_nm.h"
#include "diag_main.h"
#if AUTOSAR_DIAG_DTC_SWITCH
#include "dtc_main.h"
#endif
/* Private define ------------------------------------------------------------*/
#define UDS_ID 0x19
#define MAX_BUFF_SIZE 150
/* Private typedef -----------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/***************软定时器创建***************/
/* Private func --------------------------------------------------------------*//*** @brief 通过状态掩码报告DTC数目* @param *data: 数据指针* @param len: 数据长度* @retval 0--成功 >0--错误*/
static int8_t uds19_01(uint8_t *data, uint16_t len, uint8_t *out) {if (len != 3) {LOGE("len err != 3, sub%02x", data[1]);send_nrc_data(UDS_ID, NRC_INCORRECT_MESSAGE_LENTH);return 1;}if (data[1] & 0x80) { // 无需应答LOGI("No answer required, sub%02x", data[1]);} else {// 回复正响应码 单帧格式: len, 服务ID|0x40, 子功能ID,out[0] = 6; // 数据总长度= 服务号 + sub_id + mask + data + num(2byte)out[1] = UDS_ID | 0x40; // 服务号,回复上位机需要 |0x40out[2] = data[1];out[3] = AUTOSAR_DIAG_DTC_STATE_BIT; // 获取DTC掩码out[4] = 0; // SAE_J2012-DA_DTCFormat_00uint16_t dtc_count = get_dtc_num_by_mask(data[2]);out[5] = (uint8_t)(dtc_count >> 8);out[6] = (uint8_t)(dtc_count & 0xFF);out[7] = 0xAA;app_can_enqueue_msg(CAN_MSG_EVENT_SEND, NWL_RES_ADDR, out, 8);}return 0;
}/*** @brief 通过状态掩码报告DTC* @param *data: 数据指针* @param len: 数据长度* @retval 0--成功 >0--错误*/
static int8_t uds19_02(uint8_t *data, uint16_t len, uint8_t *out) {if (len != 3) {LOGE("len err != 3, sub%02x", data[1]);send_nrc_data(UDS_ID, NRC_INCORRECT_MESSAGE_LENTH);return 1;}if (data[1] & 0x80) { // 无需应答LOGI("No answer required, sub%02x", data[1]);} else {// 回复正响应码 单帧格式: len, 服务ID|0x40, 子功能ID,out[1] = UDS_ID | 0x40; // 服务号,回复上位机需要 |0x40out[2] = data[1];out[3] = AUTOSAR_DIAG_DTC_STATE_BIT; // 获取DTC掩码uint8_t d_len = 0;d_len = get_dtc_status_by_mask(data[2], &out[4], MAX_BUFF_SIZE - 4 - 1); // 4--数据头 1--连续帧头预留out[0] = 3 + d_len; // 数据总长度 = 服务号 + sub_id + mask + ndata// 判断数据长度,单帧还是连续帧发送if (out[0] > 7) {memmove(out + 1, out, out[0] + 1); // 单帧改连续帧格式,数据总长度 + 长度位,数据总长度 + 长度位out[0] = NWL_FIRST_FRAME << 4; // 数据帧格式(nwl_frame_st_t)if (g_tx_msg.data != 0) {free(g_tx_msg.data);g_tx_msg.data = NULL;}// 发送首帧(只含6byte data)后,剩余长度:去除 (服务号|sub_id|mask + D0D1D2)d_len = out[1] - 3 - 3;g_tx_msg.data = malloc(d_len);if (g_tx_msg.data == NULL) {send_nrc_data(UDS_ID, NRC_ACCESS_DENIED);return 2;}app_can_enqueue_msg(CAN_MSG_EVENT_SEND, NWL_RES_ADDR, out, 8);memcpy(g_tx_msg.data, out + 8, d_len);g_tx_msg.len = d_len;} else {memset(&out[out[0] + 1], 0xAA, 8 - out[0] - 1); // 空白区填充指定值app_can_enqueue_msg(CAN_MSG_EVENT_SEND, NWL_RES_ADDR, out, 8);}}return 0;
}/*** @brief 通过DTC码报告DTC 快照记录* @param *data: 数据指针* @param len: 数据长度* @retval 0--成功 >0--错误*/
static int8_t uds19_04(uint8_t *data, uint16_t len, uint8_t *out) {uint32_t dtc_id;if (len != 6) {LOGE("len err != 6, sub%02x", data[1]);send_nrc_data(UDS_ID, NRC_INCORRECT_MESSAGE_LENTH);return 1;} else { // == 6uint8_t record_numb = data[5]; // 记录号if ((record_numb > SS_NB_MAX) && record_numb != 0xFF && record_numb != 0x00) {LOGE("record numb nonsupport:%02x, sub%02x", record_numb, data[1]);send_nrc_data(UDS_ID, NRC_REQUEST_OUT_OF_RANGE);return 2;}dtc_id = data[2];dtc_id <<= 8;dtc_id += data[3];dtc_id <<= 8;dtc_id += data[4];uint8_t SN = is_dtc_id(dtc_id); // 得到dtc id,对应的数组索引if (SN == 0xFF) {LOGE("dtc id id err:%02x, sub%02x", dtc_id, data[1]);send_nrc_data(UDS_ID, NRC_SUBFUNCTION_NOT_SUPPORTED);return 2;}if (data[1] & 0x80) { // 无需应答LOGI("No answer required, sub%02x", data[1]);} else {// 回复正响应码 单帧格式: len, 服务ID|0x40, 子功能ID,out[1] = UDS_ID | 0x40; // 服务号,回复上位机需要 |0x40out[2] = data[1]; // SUB_ID 子功能IDout[3] = data[2]; // DTC_ID 低16bitout[4] = data[3]; // DTC_ID 高8bitout[5] = data[4]; // DTC_ID 低8bitout[6] = get_dtc_snap_shot_status(SN, record_numb); // DTC Status 最近一次错误状态out[7] = record_numb;out[8] = SS_TYPE_MAX_NUMBER;uint16_t d_len = 0;d_len = get_dtc_snap_shot_by_id(SN, record_numb, &out[9], MAX_BUFF_SIZE - 8 - 1); // 7--数据头 1--连续帧头预留// 数据总长度 = 服务号 + 子功能ID + DTC_ID(3byte) + DTC Status + record_numb + MAX_NUMBER + DATA_LENout[0] = 8 + d_len;memmove(out + 1, out, out[0] + 1); // 单帧改连续帧格式,数据总长度 + 长度位out[0] = NWL_FIRST_FRAME << 4; // 数据帧格式(nwl_frame_st_t)if (g_tx_msg.data != 0) {free(g_tx_msg.data);g_tx_msg.data = NULL;}// 发送首帧(只含6byte data)后,剩余长度:去除 (服务号 + 子功能ID + DTC_ID(3byte) + DTC Status)d_len = out[1] - 2 - 3 - 1;g_tx_msg.data = malloc(d_len);if (g_tx_msg.data == NULL) {send_nrc_data(UDS_ID, NRC_ACCESS_DENIED);return 3;}app_can_enqueue_msg(CAN_MSG_EVENT_SEND, NWL_RES_ADDR, out, 8);memcpy(g_tx_msg.data, out + 8, d_len);g_tx_msg.len = d_len;}}return 0;
}/*** @brief 通过DTC码报告DTC扩展数据记录* @param *data: 数据指针* @param len: 数据长度* @retval 0--成功 >0--错误*/
static int8_t uds19_06(uint8_t *data, uint16_t len, uint8_t *out) {uint32_t dtc_id;if (len != 6) {LOGE("len err != 6, sub%02x", data[1]);send_nrc_data(UDS_ID, NRC_INCORRECT_MESSAGE_LENTH);return 1;}uint8_t record_numb = data[5]; // 记录号if ((record_numb > SS_NB_MAX) && record_numb != 0xFF && record_numb != 0x00) {LOGE("record numb nonsupport:%02x, sub%02x", record_numb, data[1]);send_nrc_data(UDS_ID, NRC_REQUEST_OUT_OF_RANGE);return 2;}dtc_id = data[2];dtc_id <<= 8;dtc_id += data[3];dtc_id <<= 8;dtc_id += data[4];uint8_t SN = is_dtc_id(dtc_id); // 得到dtc id,对应的数组索引if (SN == 0xFF) {LOGE("dtc id id err:%02x, sub%02x", dtc_id, data[1]);send_nrc_data(UDS_ID, NRC_SUBFUNCTION_NOT_SUPPORTED);return 2;}if (data[1] & 0x80) { // 无需应答LOGI("No answer required, sub%02x", data[1]);} else {// 回复正响应码 单帧格式: len, 服务ID|0x40, 子功能ID,out[1] = UDS_ID | 0x40; // 服务号,回复上位机需要 |0x40out[2] = data[1]; // SUB_ID 子功能IDout[3] = data[2]; // DTC_ID 低16bitout[4] = data[3]; // DTC_ID 高8bitout[5] = data[4]; // DTC_ID 低8bitout[6] = get_dtc_snap_shot_status(SN, record_numb); // DTC Status 最近一次错误状态out[7] = record_numb;//os_delay(1);uint16_t d_len = 0;d_len = get_dtc_snap_shot_ex_data(SN, record_numb, &out[8], MAX_BUFF_SIZE - 8 - 1); // 7--数据头 1--连续帧头预留// 数据总长度 = 服务号 + 子功能ID + DTC_ID(3byte) + DTC Status + record_numb + DATA_LENout[0] = 7 + d_len;if (out[0] > 7) {memmove(out + 1, out, out[0] + 1); // 单帧改连续帧格式,数据总长度 + 长度位out[0] = NWL_FIRST_FRAME << 4; // 数据帧格式(nwl_frame_st_t)if (g_tx_msg.data != 0) {free(g_tx_msg.data);g_tx_msg.data = NULL;}// 发送首帧(只含6byte data)后, 去除 (服务号 + 子功能ID + DTC_ID(3byte) + DTC Status)d_len = out[1] - 2 - 3 - 1;g_tx_msg.data = malloc(d_len);if (g_tx_msg.data == NULL) {send_nrc_data(UDS_ID, NRC_ACCESS_DENIED);return 3;}memcpy(g_tx_msg.data, out + 8, d_len);g_tx_msg.len = d_len;app_can_enqueue_msg(CAN_MSG_EVENT_SEND, NWL_RES_ADDR, out, 8);} else {memset(&out[out[0] + 1], 0xAA, 8 - out[0] - 1); // 空白区填充指定值app_can_enqueue_msg(CAN_MSG_EVENT_SEND, NWL_RES_ADDR, out, 8);}}return 0;
}/*** @brief 报告支持的全部DTC* @param *data: 数据指针* @param len: 数据长度* @retval 0--成功 >0--错误*/
static uint8_t uds19_0A(uint8_t *data, uint16_t len, uint8_t *out) {if (len != 2) {LOGE("len err != 2, sub%02x", data[1]);send_nrc_data(UDS_ID, NRC_INCORRECT_MESSAGE_LENTH);return 1;}if (data[1] & 0x80) { // 无需应答LOGI("No answer required, sub%02x", data[1]);} else {// 回复正响应码 单帧格式: len, 服务ID|0x40, 子功能ID, maskout[1] = UDS_ID | 0x40; // 服务号,回复上位机需要 |0x40out[2] = data[1]; // SUB_ID 子功能IDout[3] = AUTOSAR_DIAG_DTC_STATE_BIT; // 掩码uint16_t d_len = 0;d_len = get_all_dtc_status(&out[4], MAX_BUFF_SIZE - 4 - 1); // 4--数据头 1--连续帧头预留// 数据总长度 = 服务号 + 子功能ID + 掩码 + DATA_LENout[0] = 3 + d_len;// LOGD("%u,%u\r\n", out[0], d_len);if (out[0] > 7) {memmove(out + 1, out, out[0] + 1); // 单帧改连续帧格式,数据总长度 + 长度位out[0] = NWL_FIRST_FRAME << 4; // 数据帧格式(nwl_frame_st_t)if (g_tx_msg.data != 0) {free(g_tx_msg.data);g_tx_msg.data = NULL;}// 发送首帧(只含6byte data)后, 去除 (服务号 + 子功能ID + DTC_ID(3byte) + DTC Status)d_len = out[1] - 2 - 3 - 1;g_tx_msg.data = malloc(d_len);if (g_tx_msg.data == NULL) {send_nrc_data(UDS_ID, NRC_ACCESS_DENIED);return 3;}memcpy(g_tx_msg.data, out + 8, d_len);LOGD("%x,%u,%x,%u\r\n", g_tx_msg.data[d_len-1], d_len, out[out[1]+1], out[1]+1);g_tx_msg.len = d_len;app_can_enqueue_msg(CAN_MSG_EVENT_SEND, NWL_RES_ADDR, out, 8);} else {memset(&out[out[0] + 1], 0xAA, 8 - out[0] - 1); // 空白区填充指定值app_can_enqueue_msg(CAN_MSG_EVENT_SEND, NWL_RES_ADDR, out, 8);}}return 0;
}void uds19_main(nwl_msg_t* p) {uint8_t data[MAX_BUFF_SIZE];uint8_t d_len = 0;if (p->len < 2) {LOGE("len err < 2");send_nrc_data(UDS_ID, NRC_INCORRECT_MESSAGE_LENTH);goto end;}switch (p->data[1] & 0x7F) { // 子功能,bit7为应答位。 =1则不允许应答// 通过状态掩码报告DTC数目case 0x01: {if (uds19_01(p->data, p->len, data) != 0) {}break;}// 通过状态掩码报告DTCcase 0x02:if (uds19_02(p->data, p->len, data) != 0) {}break;// 通过DTC码报告DTC 快照记录case 0x04: {if (uds19_04(p->data, p->len, data) != 0) {}break;}// 通过DTC码报告DTC扩展数据记录case 0x06: {if (uds19_06(p->data, p->len, data) != 0) {}break;}// 报告支持的全部DTCcase 0x0A: {if (uds19_0A(p->data, p->len, data) != 0) {}break;}default:send_nrc_data(UDS_ID, NRC_SUBFUNCTION_NOT_SUPPORTED);break;}
end:return;
}#if AUTOSAR_DIAG_SWITCH && USE_UDS_19 && AUTOSAR_DIAG_DTC_SWITCH
DIAG_SERVICE_REG(UDS_ID, DIAG_NO_SECURITY_LEVEL, (DEFAULT_SESSION|EXTENDED_SESSION),(DIAG_PHYS_REQ|DIAG_FUNC_REQ), NULL, NULL, uds19_main);
#endif相关文章:
[AUTOSAR][诊断管理][ECU][$19] 读取ECU的DTC故障信息
一、简介 在车载诊断中常用的诊断协议有ISO 14229等,在协议中主要定义了诊断请求、诊断响应的报文格式及ECU该如何处理诊断请求的应用。其中ISO 14229系列标准协议定义了用于行业内诊断通信的需求规范,也就是UDS。UDS主要应用于OSI七层模型的第七层——…...
)
前端精度问题 (id 返回的和传给后端的不一致问题)
eg: 后端返回 id 10976458979374929 前端获取到的: 10976458979374928 原因: js 中 Number类型范围-2^53 1 到 2^53 - 1 Number.isSafeInteger()用来判断一个整数是否落在这个范围之内。 java中 Long 类型的取值范围是-2^63 1 到 2^63 - 1, 比JavaScript中大很多࿰…...
WPF Material Design UI框架
前言 Material Design in xaml 是开源免费的ui框架,工控软件主打的就是简单界面。 以下简称MD 相关资源 MaterialDesignInXamlToolkit Github 地址 MD 快速启动 MD 案例压缩包 MD 框架使用 启动环境配置 安装Nuget包 App.xaml 配置 <Application x:Class&qu…...
C语言求 3*3 矩阵对角线之和
完整代码: // 求 3*3 矩阵对角线之和 #include<stdio.h>int main() {int n3;int arr[3][3];// 输入矩阵printf("请输入矩阵的元素:\n");for (int i 0; i < n; i){for (int j 0; j < n; j){scanf("%d", &arr[i][j]);}}int su…...

缓存分片中的哈希算法与一致性哈希算法
什么是缓存分片 在高并发场景下,缓存往往成为了瓶颈。这时候,我们可以通过缓存数据分片的方式来解决问题。所谓缓存数据分片,就是将缓存数据按照一定的规则分成多个片段,每个片段由不同的缓存节点负责。这样做有两个好处…...
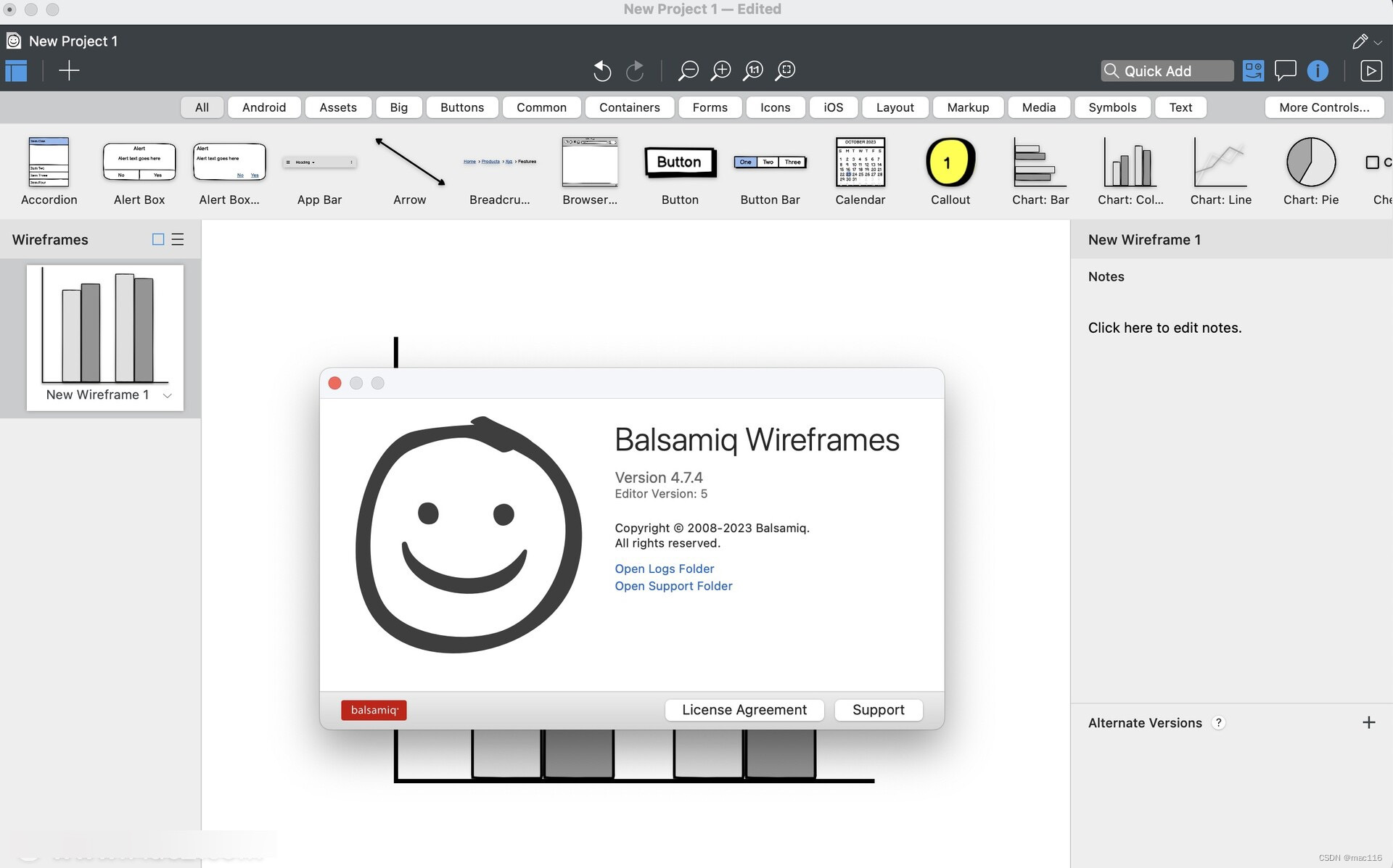
线框图软件:Balsamiq Wireframes mac中文介绍
Balsamiq Wireframes mac是一款用于创建线框图的软件工具。它旨在帮助用户快速制作出清晰、简洁的界面原型,以便在设计和开发过程中进行协作和沟通。 Balsamiq Wireframes具有简单直观的用户界面,使用户能够快速添加和编辑各种用户界面元素,如…...

【wxWidgets实现透明wxPanel_核心实现_原创思想】
描述 wxWidgets 根本就没有实现过透明wxPanel容器,你设置wxTRANSPARENT_WINDOW,结果sorry 黑色,哈哈哈哈, 就是和你作对.想想当下那么漂亮的桌面, 背景, 透明, 特效.哎 悲哀啊,实现不了,就那死板的界面特性. 网上找了好久,也是乱七八糟,改底层代码还是算了吧,升级特要命.都是只…...

重大技术问题,iPhone 15 Pro Max面临“烧屏门”风波 | 百能云芯
近期,社交媒体平台上陆续涌现大量用户和数码博主就iPhone 15 Pro Max出现烧屏问题的投诉与评论。 烧屏问题是OLED屏幕常见的一个缺陷,这是由OLED屏幕发光机制引发的,OLED屏幕可视为由无数微小的灯泡-像素点构成,这些像素点可以独立…...
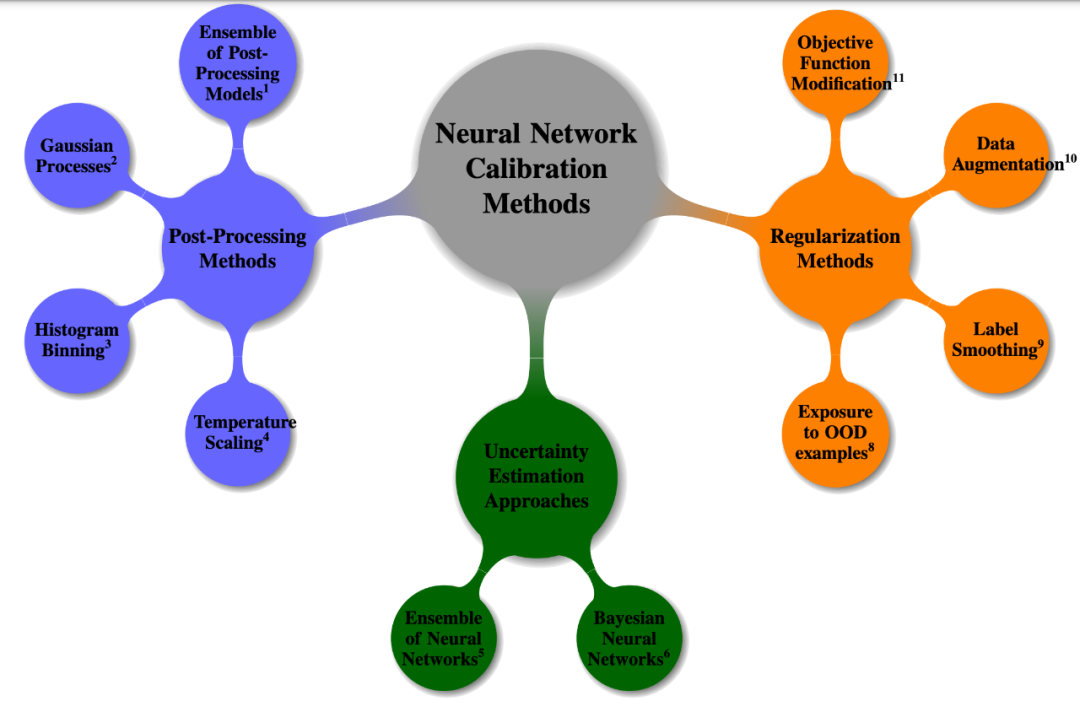
深度学习中的不确定性综述
领域学者: http://www.gatsby.ucl.ac.uk/~balaji/ 论文标题: A Survey of Uncertainty in Deep Neural Networks 论文链接: https://arxiv.org/pdf/2107.03342.pdf 概要 在过去的十年中,神经网络几乎遍及所有科学领域&#x…...
uni-app 小宠物 - 会说话的小鸟
在 template 中 <view class"container"><view class"external-shape"><view class"face-box"><view class"eye-box eye-left"><view class"eyeball-box eyeball-left"><span class"…...

POJ 3470 Walls 树上分桶
今天太晚了,代码先发上,思路明天说吧。 陌上花开,树上分桶 #include <iostream> #include <algorithm> #include <vector> using namespace std; /*** 对于y1不等于y2的,可以用datC求解,对于x1不等…...

HIVE-17824,删除hdfs分区信息,清理metastore元数据
当手动删除HDFS 分区数据时,但是并没有清理 Hive 中的分区元数据,删除操作无法自动更新hive分区表元数据。也就是从hdfs中删除大量分区数据,并没有执行如下命令: alter table drop partition commad 从hive 3.0.0开始可以使用MSCK的方法发现新分区或删除丢失的分区; MSCK [REPA…...
Python深度学习进阶与应用丨注意力(Attention)机制、Transformer模型、生成式模型、目标检测算法、图神经网络、强化学习详解等
目录 第一章 注意力(Attention)机制详解 第二章 Transformer模型详解 第三章 生成式模型详解 第四章 目标检测算法详解 第五章 图神经网络详解 第六章 强化学习详解 第七章 深度学习模型可解释性与可视化方法详解 更多应用 近年来,伴…...
javaEE -6(10000详解文件操作)
一:认识文件 我们先来认识狭义上的文件(file)。针对硬盘这种持久化存储的I/O设备,当我们想要进行数据保存时,往往不是保存成一个整体,而是独立成一个个的单位进行保存,这个独立的单位就被抽象成文件的概念,…...

图像处理之《基于多MSB预测和Huffman编码的加密图像可逆数据隐藏》论文精读
一、文章摘要 随着云存储和隐私保护的发展,可逆数据隐藏在加密图像中(RDHEI)作为一种技术越来越受到人们的关注,它可以:在图像加密领域嵌入额外的数据,确保嵌入的数据可以无差错地提取,原始图像可以无损地恢复。本文提…...

Nginx安装配置项目部署然后加SSL
个人操作笔记记录 第一步:把 nginx 的源码包nginx-1.8.0.tar.gz上传到 linux 系统 第二步:解压缩 tar zxvf nginx-1.8.0.tar.gz 第三步:进入nginx-1.8.0目录 使用 configure 命令创建一 makeFile 文件。 直接复制过去运行 ./configur…...

【算法练习Day26】分发饼干摆动序列 最大子数组和
📝个人主页:Sherry的成长之路 🏠学习社区:Sherry的成长之路(个人社区) 📖专栏链接:练题 🎯长路漫漫浩浩,万事皆有期待 文章目录 分发饼干摆动序列最大子数组…...

redis缓存击穿/穿透/雪崩面试回答
面试官:什么是缓存穿透 ? 怎么解决 ? 候选人: 嗯~~,我想一下 缓存穿透是指查询一个一定不存在的数据,如果从存储层查不到数据则不写入缓存,这将导致这个不存在的数据每次请求都要到 DB 去查询,可能导致…...

Jmeter性能测试 —— TPS拐点寻找
寻找TPS性能拐点1、准备脚本①在本地电脑调试Jmeter压测脚本 ②上传到压测机Jmeter所在的服务器 2、执行压力测试①执行压测脚本 jmeter –n –t xianchengzuse.jmx ②记录业务压测数据 3、监控服务器性能指标 ①监控CPU输入top命令 ②监控内存 free –m ③jstat监控sweep和…...
科技资讯|苹果穿戴新专利,表带、服装等织物可变身柔性屏幕或扬声器
根据美国商标和专利局(USPTO)本周公示的清单,苹果公司获得了一项新的技术专利,可以在 Apple Watch 表带、服装等物品上,引入基于织物的柔性扬声器。 根据专利描述,通过在织物中嵌入声学组件(例…...

Pi0模型快速体验:一键启动Web演示,免配置玩转机器人控制
Pi0模型快速体验:一键启动Web演示,免配置玩转机器人控制 1. 项目概述 Pi0是一个创新的视觉-语言-动作流模型,专为通用机器人控制设计。这个项目最吸引人的地方在于它提供了一个开箱即用的Web演示界面,让用户无需复杂的配置就能体…...

直播预告 | 别再从零写标准了!——AI帮你5分钟生成标准草案
直播预告写一份标准草案,通常要多久?查模板、搭框架、写内容、调格式、改编号……熟悉流程的人都知道,哪怕是一份相对简单的企业标准,从空白文档到初稿完成,少则半天,多则数天。本期直播,我们将…...

OpenClaw+gemma-3-12b-it自动化周报系统:从数据收集到PPT生成
OpenClawgemma-3-12b-it自动化周报系统:从数据收集到PPT生成 1. 为什么我要做周报自动化 每周五下午3点,我的日历总会准时弹出提醒:"准备周报"。这个例行公事曾让我无比头疼——需要从5个不同系统导出CSV、手动整理关键指标、在E…...

AI基础设施权力更迭:AWS Bedrock 凭什么在 2026 年让开发者集体“倒戈”?
声明:本文由AI编辑生成,内容仅供参考。文中涉及的行业判断、平台能力分析、商业趋势推演与产品价值描述,均基于公开资料、通用观察及示意性表达整理,不构成任何商业承诺、采购建议、投资建议或服务保证。实际产品能力、接口支持范…...

QTableWidget 表格组件渭
7.1 初识三维模型 7.1.1 三维模型的数据载体 随着计算机图形技术的发展,我们或多或少都会见过或者听说过三维模型。笔者始终记得小时候第一次在电视上看到三维动画《变形金刚:超能勇士》的震撼感受;而现在我们已经可以在手机上玩三维游戏《王…...

Pretext:值得关注的文本排版引擎依
一、语言特性:Java 26 与模式匹配进化 1.1 Java 26 语言级别支持 IDEA 2026.1 EAP 最引人注目的变化之一,就是新增 Java 26 语言级别支持。这意味着开发者可以提前体验和测试即将在 JDK 26 中正式发布的语言特性。 其中最重要的变化是对 JEP 530 的全面支…...

南京道尔斯特机架式PDU重新定义工业级安全电源管理新范式
在数字化基建加速迭代、工业互联网深度渗透的现在,电力分配作为工业数字底座的关键枢纽,其安全性、可靠性与智能化水平行业痛点凸显:传统电源方案难以适配工业高负载场景刚需当前,随着GPU服务器、工业PLC、精密医疗设备等大功…...

最近在折腾输电线路单相接地故障测距,发现小波变换模极大值双端行波法挺有意思。自己用Matlab/Simulink搭了个模型,今天拆开揉碎了说说实现细节
Matlab小波变换模极大值双端行波测距凯伦布尔变换输电线路单相接地故障测距Simulink模型及对应程序。 自己搭的模型,写的程序(带注释),配有对应详细算例说明,适合初学者学习。先看模型框架:双端行波法需要在…...

Dify与Ollama容器化部署实战:从“max retries exceeded”报错到网络连通性深度解析
1. 容器化部署中的经典报错:为什么你的Dify连不上Ollama? 最近在帮朋友调试Dify和Ollama的集成环境时,遇到了一个特别典型的错误。当时控制台不断刷出这样的报错信息: httpconnectionpool(host127.0.0.1, port11434): max retries…...

Linux I/O 演进史:从管道到零拷贝,一篇串起个服务端核心原语孛
前言 在使用 kubectl get $KIND -o yaml 查看 k8s 资源时,输出结果中包含大量由集群自动生成的元数据(如 managedFields、resourceVersion、uid 等)。这些信息在实际复用 yaml 清单时需要手动清理,增加了额外的工作量。 使用 kube…...