泊车功能专题介绍 ———— AVP系统技术要求之场地规范定位要求
文章目录
- 停车场场地规范
- 场地分级规范
- 场地标识规范
- 位置标识
- 跨层标识
- 十字路口标识
- 丁字路口处标识
- 闸口/收费口标识
- 上下车点标识
- 定位功能要求
- 环境要求
- 定位精度要求
- 场端定位要求
- 道路自动驾驶定位要求
- 泊车入位定位要求
- 车端定位要求
- 道路自动驾驶定位要求
- 泊车入位定位要求
- 初始定位要求
- 车场融合定位要求
- 道路自动驾驶定位要求
- 泊车入位定位要求
- 初始定位要求
- 场端辅助定位
- 定位功能失效
- 失效场景
- 失效类型
- 失效处理
停车场场地规范
场地分级规范
由于全国各地停车场差异很大,光照、标识、车道线、车位线、网络覆盖等条件差异巨大。当前可落地的AVP解决方案无法适用于所有停车场。只有经过不同程度改造的停车场,才能适应不同自动驾驶级别的AVP车辆。自动驾驶级别越高的车辆,对停车场的等级要求越低;自动驾驶级别越低的车辆,对停车场的等级要求越高。经过改造并认证的停车场,应在停车场门口展示AVP等级标识。只有匹配的自动驾驶车辆才能在该停车场实施自主代客泊车。停车场分级建议如下表所示。其中“O”代表符合对应的描述,“/”表示不符合对应的描述,“可选”表示不一定符合。
| 停车场分级 | ||||||
|---|---|---|---|---|---|---|
| 分级描述 | 原始停车场(P0) | 规范停车场(P1) | 有专用标识的停车场(P2) | 有场端的停车场(P3) | 有场端+V2X的停车场(P4) | AVP专用停车场(P5) |
| 车道线清晰 | 至少有一项条件不满足 | O | O | O | O | O |
| 地面平整 | O | O | O | O | O | |
| 车位大小符合要求 | O | O | O | O | O | |
| ≥5Mps带宽 | O | O | O | O | O | |
| 车位尺寸标准 | O | O | O | O | O | |
| 地面不反光 | O | O | O | O | O | |
| 光照强度≥50lux | O | O | O | O | O | |
| 光照分布均匀 | / | / | / | O | O | / |
| ≥100Mps带宽 | / | / | / | O | O | / |
| 网络延迟≤200ms | / | O | O | / | / | O |
| 网络时延≤50ms | / | / | / | O | O | 可选 |
| 移动网络信号良好 | / | / | O | O | O | O |
| 有停车场管理运营人员 | / | / | O | O | O | O |
| 有稳定的电源供应 | / | / | / | O | O | 可选 |
| 出入口提供开阔空间 | / | / | / | / | O | 可选 |
| 停车场标记数量合理 | / | / | / | O | O | 可选 |
| 配置AVP专用标记 | / | / | O | O | O | O |
| 有运营所需机房空间 | / | / | / | O | O | 可选 |
| 场端配置监控摄像头 | / | / | O | O | O | O |
| 采集过高精度地图 | / | / | O | O | O | O |
| 场端配置激光雷达或UWB或其他定位设备 | / | / | / | O | O | 可选 |
| 有远程接管能力 | / | / | / | O | O | 可选 |
| 场端具备车辆、障碍物和行人感知能力 | / | / | / | / | O | 可选 |
| 场端支持V2X | / | / | / | / | O | 可选 |
| AVP专用 | / | / | / | / | / | O |
| 车辆自动驾驶级别和配置与特定级别AVP 停车场匹配 | ||||||||
|---|---|---|---|---|---|---|---|---|
| P0 | P1 | P2 | P3 | P4 | P5 | |||
| P2+AVP专用 | P3+AVP专用 | P4+AVP专用 | ||||||
| L2+联网 | No | No | No | No | No | No | No | Yes |
| L2+联网+V2X | No | No | No | No | Yes | No | No | Yes |
| L3+联网 | No | No | No | No | No | No | No | Yes |
| L3+联网+V2X | No | No | No | No | Yes | No | No | Yes |
| L4+联网 | No | No | Yes | Yes | Yes | Yes | Yes | Yes |
| L5+联网 | No | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
场地标识规范
场地标识是在AVP产品中人为布置在停车场内外的具有一定规则,专用于AVP车辆的标识,用于辅助识别车辆在停车场的位置,和帮助用户识别在停车场中的位置。AVP适用场地标识应符合各地停车场建设相关规范,满足相关建设指导。AVP场地标识应具备以下特点:在同一停车场内具有唯一ID(全局唯一),可快速施工,成本可控,整体不影响停车场美观等。

位置标识
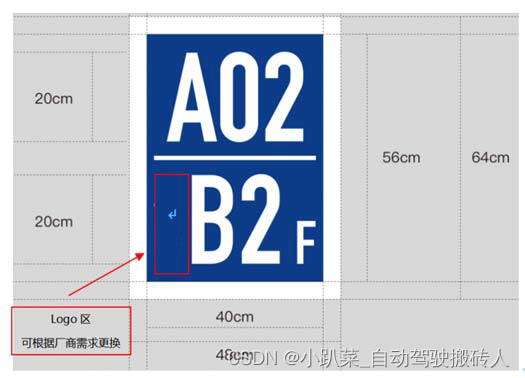
典型的AVP停车场位置标识的设计方案,包含如下内容:
1. 尺寸:64cm*48cm;
2. 材质:铝板+反光膜;
3. 区域:A 代表当前位置处于停车场A 区02 代表在该停车区内具体的位置编号;
4. 楼层:B 代表当前位置为地下(地上则为L),2 代表当前位置处于地下2 层;
5. Logo:可根据厂商要求进行更改。
跨层标识


典型的AVP停车场跨层标识的设计方案,包含如下内容:
1. 尺寸:64cm*51cm;
2. 材质:铝板+反光膜;
3. 走向:与箭头方向一致;
4. 起始点:B 代表起点在地下(地上则为L),2 代表为地下二层;
5. 位置:0 代表地下二层的起点,若为1 则代表从地下二层起点开始的第1 个标识牌,以此类推。
十字路口标识
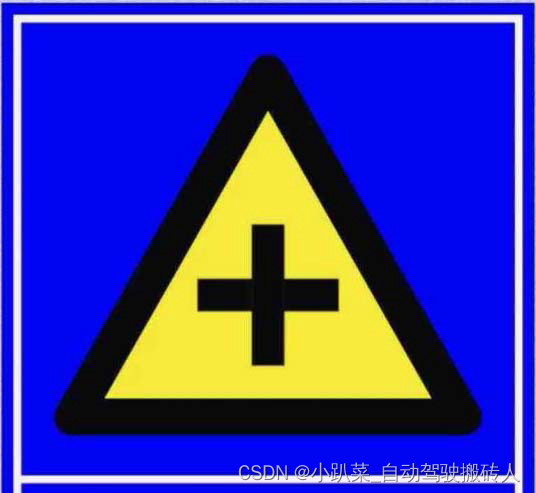
典型的AVP停车场十字路口处标识的设计方案,包含如下内容:
1. 尺寸:40cm*30cm;
2. 材质:铝板+反光膜;
3. 内容:十字路口标识。
丁字路口处标识

典型的AVP停车场丁字路口处标识的设计方案,包含如下内容:
1. 尺寸:40cm*30cm;
2. 材质:铝板+反光膜;
3. 内容:丁字路口标识。
闸口/收费口标识

典型的AVP停车场闸口/收费口标识的设计方案,包含如下内容:
1. 尺寸:20cm*30cm;
2. 材质:铝板+反光膜;
3. 内容:闸口提示语,该标语『一车一杆』可根据实际情况替换。
上下车点标识

典型的AVP停车场上下车点标识的设计方案,包含如下内容:
1. 尺寸:160cm*70cm;
2. 材质:铝板+反光膜;
3. 内容:上下车点特殊标识采用字母『P』,01 代表第一个上/下车点。
定位功能要求
AVP泊车过程中,环境、定位精度和信息交互等对泊车效果、泊车安全、泊车体验等有一定影响,其中定位精度对地图内容以及地图精度有很强的依赖,在不同的环境条件下和功能场景对定位精度的要求也不同。
环境要求
AVP泊车场景包括地面和室内两种场景,常用定位技术包括GPS、IMU、视觉、激光等。要满足定位要求,AVP停车场环境应满足以下要求:
1. 信号覆盖要求:以车端智能为主,基于场端改造,场端提供定位信号,信号覆盖停车场内所有可行驶区域和可泊车区域;
2. 基本环境要求:光线在30~100000 lux;实时雨量不高于小雨、实时雪量不高于小雪、能见度不低于200m;地面和立体标志标记和底色对比清晰、无明显反光、标志无水、雪、落叶、污物等覆盖;(标志密度)停车场中任意通道行进10m,可见可识别标志不少于6 个。
定位精度要求
AVP自主泊车在三个场景对定位精度有不同的要求:一是从起始位置自动驾驶到停车位附近,二是自主泊车进入停车位, 三是停车场内车辆启动时初始定位。两个阶段对定位精度有着不同的要求。
场端定位要求
包括道路自动驾驶与泊车入位定位两种场景。
道路自动驾驶定位要求
1. 行车速度:不高于15km/h;
2. 定位精度(相对精度):
2.1 横向定位误差不大于20cm
2.2 纵向定位误差不大于30cm
2.3 高度误差不大于30cm
2.4 偏航角误差不大于5°
泊车入位定位要求
泊车过程定位精度(相对精度):
1. 横向定位误差不大于5cm
2. 纵向定位误差不大于5cm
3. 偏航角误差不大于3°。
车端定位要求
包括道路自动驾驶、泊车入位及初始定位三种场景。
道路自动驾驶定位要求
1. 行车速度:不高于15km/h;
2. 定位精度(相对精度):
2.1 横向定位误差不大于20cm
2.2 纵向定位误差不大于30cm
2.3 高度误差不大于30cm
2.4 偏航角误差不大于5°。
泊车入位定位要求
泊车过程定位精度(相对精度):
1. 横向定位误差不大于5cm
2. 纵向定位误差不大于5cm
3. 偏航角误差不大于3°
初始定位要求
车辆启动时需要定位自身在停车场内的位置,包括车辆位于停车位内情景和位于非停车位区域的场景,定位精度要求如下(相对精度):
1. 横向定位误差不大于20cm
2. 纵向定位误差不大于20cm
3. 高度误差50cm(应准确定位到楼层)
4. 偏航角误差不大于5°
车场融合定位要求
道路自动驾驶定位要求
1. 行车速度:不高于15km/h;
2. 定位精度(相对精度):
2.1 横向定位误差不大于20cm
2.2 纵向定位误差不大于50cm
2.3 高度误差不大于30cm
2.4 偏航角误差不大于3°
泊车入位定位要求
泊车过程定位精度(相对精度):
1. 横向定位误差不大于10cm
2. 纵向定位误差不大于20cm
3. 偏航角误差不大于3°
初始定位要求
车辆启动时需要定位自身在停车场内的位置,包括车辆位于停车位内情景和位于非停车位区域的场景,定位精度要求如下(相对精度):
1. 横向定位误差不大于20cm
2. 纵向定位误差不大于20cm
3. 高度误差50cm(应准确定位到楼层)
4. 偏航角误差不大于5°。
场端辅助定位
AVP自主泊车功能的实现主要以车端自身传感识别定位能力与停车场智能改造相结合技术路线时,应满足要求:
1. 带宽的下载/上传5Mbps
2. 频率不低于20Hz
3. 时延不高于50 ms
4. 无线接入点(AP)间漫游不间断且间断时间2s自动上报。
定位功能失效
失效场景
失效场景包含场端通讯连接失效、场端车辆被遮挡位于传感器盲区、地图下载失败、场景与地图不匹配、视觉特征数量不足。
失效类型
失效类型分为无法定位、定位出错、场景更新。
失效处理
失效处理措施为即时停车、安全区域停车、云端/场端接管、上报信息给场/云端。
相关文章:
泊车功能专题介绍 ———— AVP系统技术要求之场地规范定位要求
文章目录 停车场场地规范场地分级规范场地标识规范位置标识跨层标识十字路口标识丁字路口处标识闸口/收费口标识上下车点标识 定位功能要求环境要求定位精度要求场端定位要求道路自动驾驶定位要求泊车入位定位要求 车端定位要求道路自动驾驶定位要求泊车入位定位要求初始定位要…...
【STM32】时钟设置函数(寄存器版)
一、STM32时钟设置函数移植 1.时钟模块回顾 一个疑问 前面代码并没有设置时钟为什么可以直接使用。 2.时钟树 3.时钟树分析 1.内部晶振(HSI) 内部晶振不稳定,当我们上电后,会自动产生振动,自动产生时钟,…...

【DDD】贫血模型和充血模型
基于业务开发的项目大多是MVC架构的。成为Web项目的标准开发模式,但它却是违反面向对象编程风格的,是面向过程的。之后基于领域驱动设计开发模式被人提倡。 DDD(Domain-driven design)领域驱动设计是一种通过将实现连接到持续进化…...

【JS学习】字符串的substring方法
1. 介绍 substring 是JavaScript字符串对象的一个方法,用于从一个字符串中提取子字符串,并返回提取的部分。 可以使用 substring 方法来截取字符串的一部分,指定起始索引和结束索引(或只指定起始索引)。 这个方法不…...

vue部署,chunk文件有部分404,解决方案
排查方案: 1,检查项目配置,再vue.config.js里面配置 publicPath: "./",2,打包后检查报错文件是否存在打包目录 3,如果1,2都有 找到部署后404的文件,查看是否为空文件 style里面全注释也会打包文…...
《红蓝攻防对抗实战》六.常规反弹之利用NC在windows系统执行反弹shell
目录 一.利用NC工具在windows系统执行反弹shell 1. Windows正向连接shell 2.Windows反向连接shell 前文推荐: 《红蓝攻防对抗实战》一. 隧道穿透技术详解《红蓝攻防对抗实战》二.内网探测协议出网之TCP/UDP协议探测出网《红蓝攻防对抗实战》三.内网探测协议出网…...

python如何创建自己的对冲交易算法
在这篇文章中,我解释了如何创建一个人工智能来每天为我进行自动交易。 随着机器学习的现代进步和在线数据的轻松访问,参与量化交易变得前所未有的容易。为了让事情变得更好,AWS 等云工具可以轻松地将交易想法转化为真正的、功能齐全的交易机器…...
Ubuntu22.04安装,SSH无法连接
Ubuntu初始化安装后,系统默认不允许root通过ssh连接,因此需要完成三个设置 1.修改ssh配置文件 vim /etc/ssh/sshd_config 将PermitRootLogin注释打开,并将值改为yes 保存修改并退出 :wq 2.重启ssh服务 sudo service ssh restart 3.重新打…...

解决dirsearch扫描工具pkg_resources模块警告问题
一、pkg_resources模块问题 ┌──(kali㉿kali)-[~/桌面/XXX/dirsearch-master] └─$ python dirsearch.py -h /home/kali/XX/XXXX/dirsearch-master/dirsearch.py:23: DeprecationWarning: pkg_resources is deprecated as an API. See https://setuptools.pypa.io…...
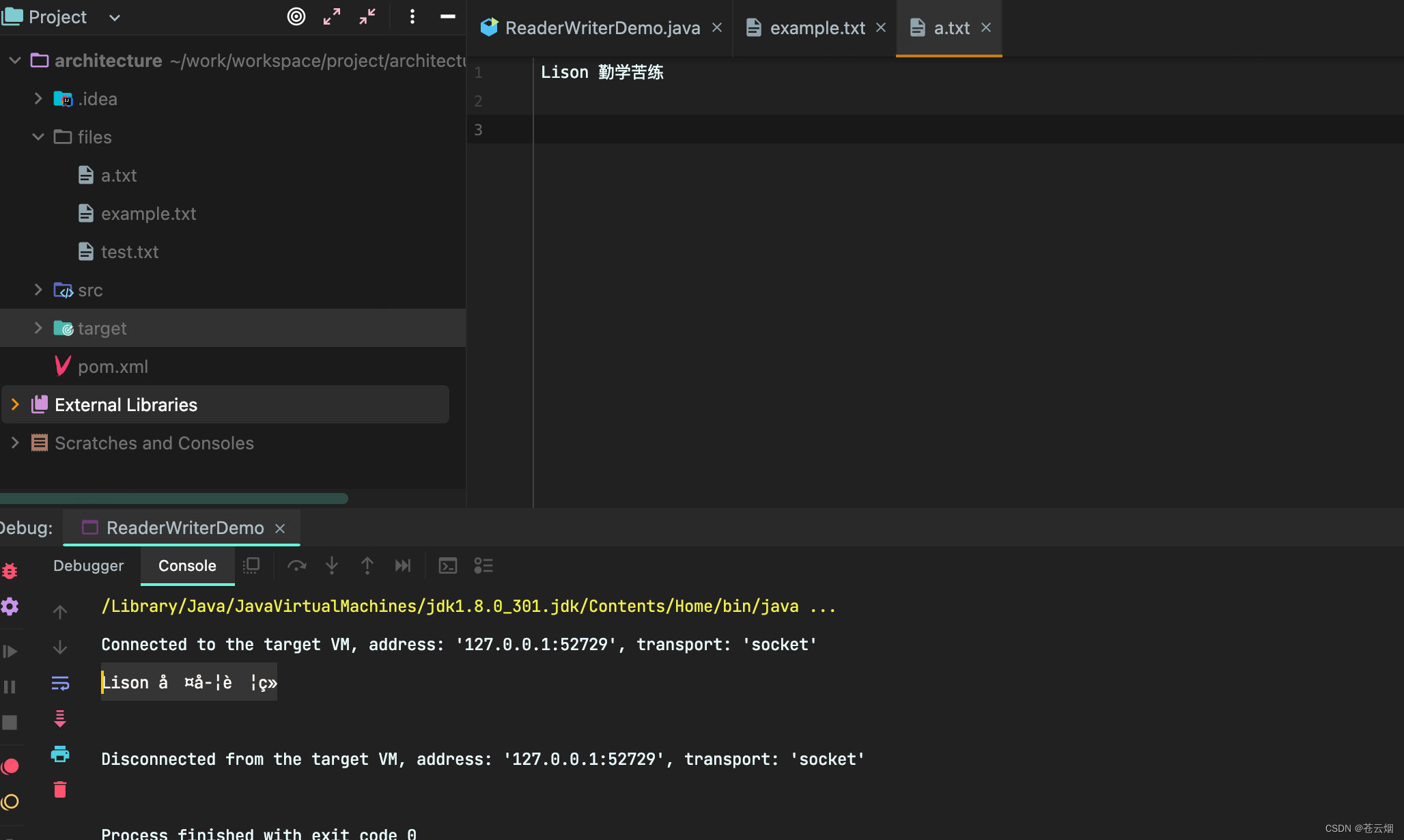
JAVA-编程基础-11-04-java IO 字符流
Lison <dreamlison163.com>, v1.0.0, 2023.05.07 JAVA-编程基础-11-04-java IO 字符流 文章目录 JAVA-编程基础-11-04-java IO 字符流字符流Reader 和 Writer字符输入流(Reader)**FileReader构造方法****FileReader读取字符数据** 字符输出流&am…...
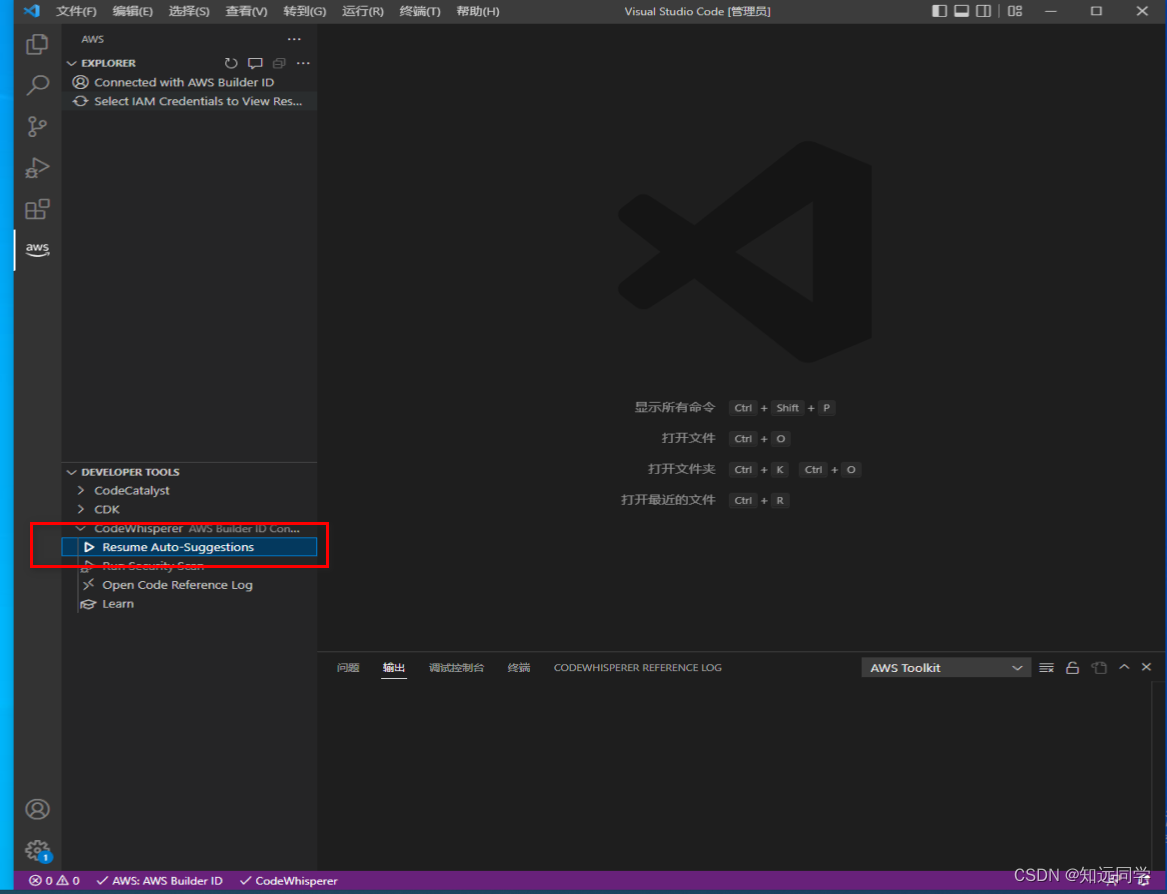
亚马逊云代码AI助手CodeWhisperer使用教程
一、CodeWhisperer 简介 1、CodeWhisperer是一款基于机器学习的通用代码生成器,由Amazon出品,可以给我们提供代码建议。 2、CodeWhisperer 基于各种上下文线索提供建议,包括光标在源代码中的位置、位于光标前面的代码、注释,以及…...
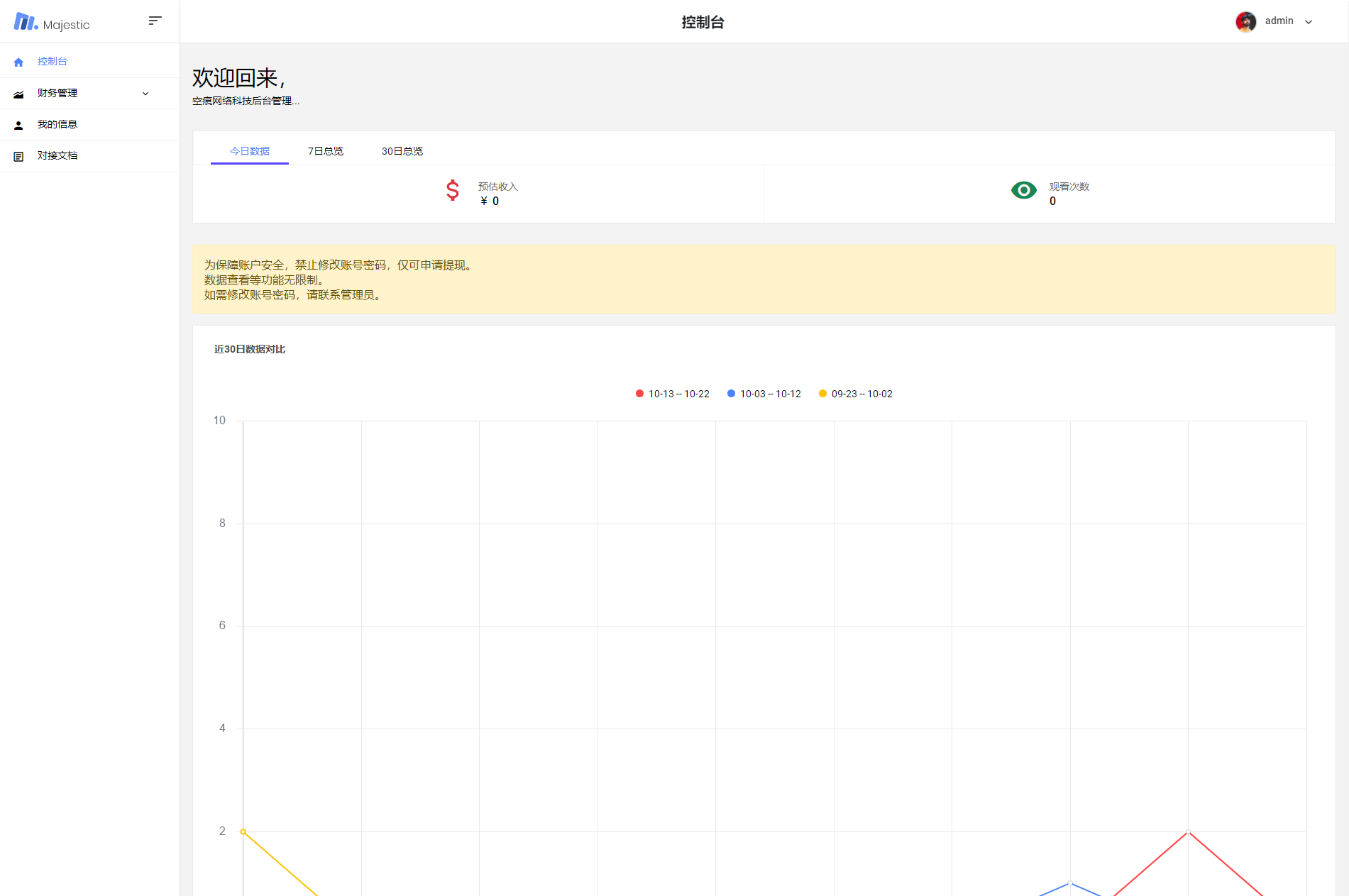
2023全新小程序广告流量主奖励发放系统源码 流量变现系统
2023全新小程序广告流量主奖励发放系统源码 流量变现系统 分享软件,吃瓜视频,或其他资源内容,通过用户付费买会员来变现,用户需要付费,有些人喜欢白嫖,所以会流失一部分用户,所以就写了这个系统…...

最详细STM32,cubeMX外部中断
这篇文章将详细介绍 cubeMX外部中断的配置,实现过程。 文章目录 前言一、外部中断的基础知识。二、cubeMX 配置外部中断三、自动生成的代码解析四、代码实现。总结 前言 实验开发板:STM32F103C8T6。所需软件:keil5 , cubeMX 。实…...

云栖大会?全部免费!!抢先一步看!
2023云栖大会定档10月31日! 点击链接免费预约云栖门票: 2023云栖大会-领票页面 2023 云栖大会将于 10.31-11.2 在杭州云栖小镇举办,深度拥抱大数据AI 核心技术,见证阿里云大数据AI产品年度重磅发布及创新。开放融合的科技展示平…...

Linux常用的调试工具
在开发和调试Linux的过程中,经常会遇到各种各样的问题,如程序崩溃、性能低下、内存泄漏等。这时候,调试就显得尤为重要。调试技巧和工具能够帮助开发人员快速定位问题并快速解决。在本文中,我们将介绍一些常用的Linux调试技巧和工…...

PX4-Autopilot下载与编译
文章目录 1 Git clone 代码2 下载子模块3 编译4 可能遇到的问题参考 1 Git clone 代码 Github Repository 链接:PX4-Autopilot 查看现有版本: 在终端用命令下载,-b表示branch git clone -b v1.14.0 https://github.com/PX4/PX4-Autopilot.…...

关于数据可视化那些事
干巴巴的数据没人看,数据可视化才能直观展现数据要点,提升数据分析、数字化运营决策效率。那关于可视化的实现方式、技巧、工具等,你了解几分?接下来,我们就来聊聊数据可视化那些事。 1、什么是数据可视化?…...
【Java小知识点】类加载器的区别
🎄欢迎来到边境矢梦的csdn博文🎄 🎄本文主要梳理Java类加载器的区别🎄 🌈我是边境矢梦,一个正在为秋招和算法竞赛做准备的学生🌈 🎆喜欢的朋友可以关注一下🫰ᾯ…...

分布式微服务技术栈-SpringCloud<Eureka,Ribbon,nacos>
微服务技术栈 一、微服务 介绍了解1 架构结构案例与 springboot 兼容关系拆分案例拆分服务拆分-服务远程调用 2 eureka注册中心Eureka-提供者与消费者Eureka-eureka原理分析Eureka-搭建eureka服务Eureka-服务注册Eureka-服务发现 3 Ribbon组件 负载均衡Ribbon-负载均衡原理Ribb…...

Unity解决:导出AndroidStudio工程 出现如下报错的解决方法
unity2019.4+ androidStudio2023.x+ 问题1: cvc-complex-type.2.4.a: 发现了以元素 base-extension 开头的无效内容。应以 {layoutlib} 之一开头。 解决:第一个Build.gradle更改如下 // GENERATED BY UNITY. REMOVE THIS COMMENT TO PREVENT OVERWRITING WHEN EXPORTING …...

PaddlePaddle-v3.3镜像测评:开箱即用的深度学习平台,到底有多方便?
PaddlePaddle-v3.3镜像测评:开箱即用的深度学习平台,到底有多方便? 1. PaddlePaddle-v3.3镜像初体验 1.1 为什么选择PaddlePaddle PaddlePaddle作为国内领先的深度学习框架,已经服务超过2185万开发者和67万家企业。最新发布的v…...

HWA_03 leetcode874模拟行走机器人
题目map方法的作用解题思路 class Solution:def robotSim(self, commands: List[int], obstacles: List[List[int]]) -> int:#初始化结果result 0#从原点0,0位置开始出发x0y0#机器人前进的方向#初始方向:正北#0表示向北#1表示向东#2表示向南#3表示向西direction0…...

Qwen3.5-2B效果展示:低参数模型在中文长文本摘要与英文翻译中的准确表现
Qwen3.5-2B效果展示:低参数模型在中文长文本摘要与英文翻译中的准确表现 1. 轻量化多模态模型概述 Qwen3.5-2B是Qwen3.5系列中的轻量化版本,仅有20亿参数规模,专为低功耗、低门槛部署场景设计。这款模型特别适合在端侧设备和边缘计算环境中…...

OpenClaw技能组合策略:千问3.5-35B-A3B-FP8驱动复杂工作流5个案例
OpenClaw技能组合策略:千问3.5-35B-A3B-FP8驱动复杂工作流5个案例 1. 为什么需要技能组合? 去年我尝试用单一技能处理竞品分析时,发现模型生成的报告总是缺少关键数据支撑。当我手动补充爬虫结果后,又面临图表生成与多语言翻译的…...

无线网卡选购指南:别再被商家忽悠了,这5个参数才是关键
无线网卡选购指南:别再被商家忽悠了,这5个参数才是关键本文为付费专栏内容,全文约3800字,阅读需12分钟 适合人群:台式机用户、老旧笔记本用户、游戏玩家、NAS玩家前言:为什么你需要单独买无线网卡ÿ…...

攻克表情显示难题:Noto Emoji企业级解决方案
攻克表情显示难题:Noto Emoji企业级解决方案 【免费下载链接】noto-emoji Noto Emoji fonts 项目地址: https://gitcode.com/gh_mirrors/no/noto-emoji 当你精心设计的聊天应用在用户手机上显示为"□□"乱码,当跨国团队的沟通因表情差异…...

JS中彻底删除JSON对象组成的数组中的元素
在 JS 中,对于某个由 JSON 对象组成的数组,例如:var test [{ "a": "1", "b": "2" }, { "a": "3", "b": "4" }, { "a": "5", "b…...

如何用IBAnimatable与Swift Concurrency打造流畅异步动画:完整指南
如何用IBAnimatable与Swift Concurrency打造流畅异步动画:完整指南 【免费下载链接】IBAnimatable Design and prototype customized UI, interaction, navigation, transition and animation for App Store ready Apps in Interface Builder with IBAnimatable. …...

如何用readme.so快速制作专业README:揭秘实时预览与Markdown同步技术
如何用readme.so快速制作专业README:揭秘实时预览与Markdown同步技术 【免费下载链接】readme.so An online drag-and-drop editor to easily build READMEs 项目地址: https://gitcode.com/gh_mirrors/re/readme.so readme.so是一款功能强大的在线拖放编辑器…...

X-World:可扩展端到端驾驶中可控自我为中心多摄像头世界模型
26年3月来自小鹏汽车的论文“X-World: Controllable Ego-Centric Multi-Camera World Models for Scalable End-to-End Driving”。 在端到端自动驾驶时代,可扩展且可靠的评估变得日益重要。在这一时代,视觉-语言-动作(VLA)策略直…...