CV——day78 读论文:通过静态背景构建扩展低通道路边雷达的探测距离(目标是规避风险)
Extending the Detection Range for Low-Channel Roadside LiDAR by Static Background Construction
- 通过静态背景构建扩展低通道路边雷达的探测距离
- I. INTRODUCTION
- II. RELATED WORK
- A. LiDAR-Based 3-D Vehicle and Road User Detection
- B. LiDAR Data Background Filtering
- C. Extending Detection Range for Visual Sensor
- III. LIDAR SENSOR AND ITS DATA
- IV. STATIC BACKGROUND CONSTRUCTION
- A. Background Construction
- B. 静态背景优化,减少点缺失
- C. 静态背景优化,过滤噪声点
- V. 扩大路边激光雷达探测范围
- A. Background Filtering背景过滤
- B. Detection 检测
- VII. CONCLUSIONS AND DISCUSSION
通过静态背景构建扩展低通道路边雷达的探测距离
Extending the Detection Range for Low-Channel Roadside LiDAR by Static Background Construction
本文试图通过使用低通道路边光检测和距离传感器(LiDAR:The light detection and range sensors)传感器来扩展检测范围,这是由于其价格低并且在未来被广泛使用。主要包含两部分:静态背景构建与交通目标检测
-
对于静态背景构建,利用连续的点云帧数据覆盖最大的雷达扫描水平-垂直角度,最终获得背景信息。
-
对于车辆和道路使用者检测,**基于密度的噪声应用空间聚类(DBSCAN)**算法
-
对于远距离交通目标检测,使用快速傅立叶变换(FFT)算法来过滤噪声点并识别车辆和道路使用者点。
总体过完一遍之后,发现这并不是之前看到的基于传统单阶段、两阶段的目标检测模型,而是基于点云和雷达的目标检测技术,有一定的学习基础看起来会容易一些,不然就当扩充知识面也行。
I. INTRODUCTION
目前在扩大探测范围方面的研究还存在一些有待加强的问题:
1)要求远距离目标与传感器之间没有障碍物;
2)行人作为最易受影响的道路使用者,在远距离检测中往往被忽略;
3)在复杂、高密度的交通环境中,准确性和鲁棒性会急剧下降。
我们从多帧点云中提取轨迹。为了扩大检测范围,准确检测远距离目标,在点云稀疏的远距离区域,利用快速傅里叶变换(FFT)对目标点和噪声点进行分类。
本文的主要贡献可以认为如下。
1)提出了一种新的静态背景构建方法,对背景点进行精确过滤,以适应不同等级的交通状况。
2)首次将FFT算法引入稀疏点云场景中目标点和噪声点的分类。
3)低通道LiDAR扩展探测距离的方法在复杂的交通流环境下效果良好。在远距离和LiDAR传感器之间可以存在不同的交通流密度。
4)车辆和骑车人的检测距离可以扩展到100米,相当于LiDAR的检测范围。行人检测距离可扩展至85 m。在复杂交通环境下,距离、平均查准率(AP)和平均查全率(AR)都比以往的研究有进一步的提高。
II. RELATED WORK
为了区别于已有的研究,回顾了基于LiDAR点云的车辆和道路使用者识别的相关研究。我们还回顾了尽我们所知扩展LiDAR和相机传感器的检测范围的文献。
A. LiDAR-Based 3-D Vehicle and Road User Detection
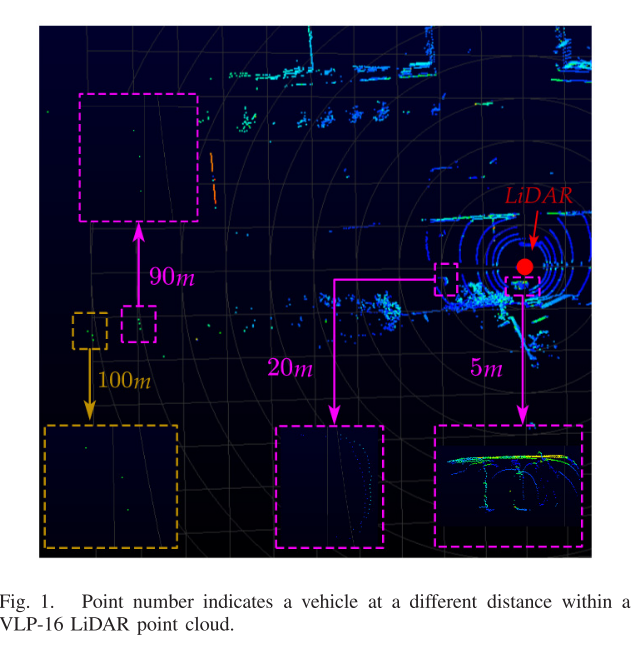
图1.点数表示在VLP-16激光雷达点云内不同距离的车辆。
B. LiDAR Data Background Filtering
C. Extending Detection Range for Visual Sensor
远距离目标的准确性和鲁棒性仍然是视觉传感器(如相机和LiDAR)的关键问题。其根本原因在于远距离的稀疏点或像素难以提取目标的关键特征。对于视觉传感器的远距离检测,机器视觉专家提出了许多模型和算法来扩展检测范围,提高检测精度。
III. LIDAR SENSOR AND ITS DATA
与诸如64通道或128通道LiDAR传感器之类的高通道LiDAR传感器相比,如果实现大规模生产,则预期低通道LiDAR传感器的价格将显著下降到大约$100。
因此,在本文中,我们使用低通道LiDAR传感器(Velodyne VLP-16)通过从其点云数据构建静态背景来扩展其检测范围。
- 单帧内的最大点数N_f可计算为:(1)
Nf=360∗Nc/αrN_f = 360 ∗ N_c / α_r Nf=360∗Nc/αr
Nc是LiDAR的通道数,αr是LiDAR的探测水平分辨率。对于VLP-16 LiDAR,Nf大约为每帧28800。
- 在扫描区域内,可能存在最大区别激光点N_BP:(2)
NBP=360°∗NcαminN_{BP} = 360° ∗ N_c α_{min} NBP=360°∗Ncαmin
对于VLP-16 LiDAR, NBP = 576000,远远大于Nf。
IV. STATIC BACKGROUND CONSTRUCTION
A. Background Construction
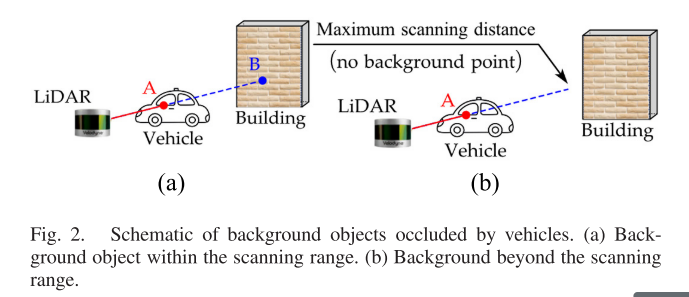
图2:被车辆遮挡的背景物体示意图。(a)扫描范围内的背景对象。(b)背景超出扫描范围。
在交通拥挤的情况下,背景对象经常被车辆或道路使用者遮挡。因此,在构建静态背景时,应去除车辆、道路使用者和噪声点。
背景对象可分为范围内对象和范围外对象。当车辆或道路用户通过时,激光束将为范围内的对象返回不同的激光点。对于远距物体,当车辆或道路用户经过时,激光束会返回激光点,否则什么也不返回,如图2所示。
采用二维矩阵MBP表示背景点云为:
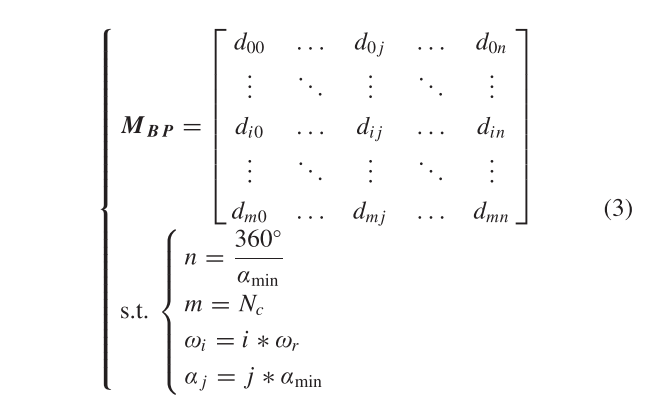
如果点云中垂直角、水平角相同,且形成的激光束相同,则定义距离最远的点为背景点:

其中,dij是矩阵MBP中第i行第j列的元素,dij是构造静态背景的点云中水平角αj和对顶角ωi处的点的距离集合。
B. 静态背景优化,减少点缺失
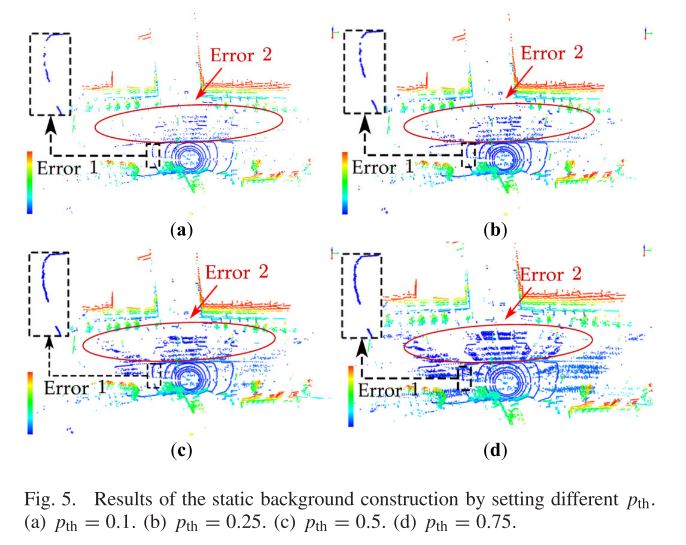
通过设置阈值pth来优化静态后台。因此(4)改写为:
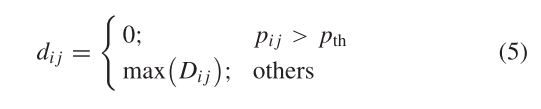
从图5可以看出,随着pth值的增大,背景信息在近距离内变得更加丰富。
C. 静态背景优化,过滤噪声点
建议在文中细看,图8。之前和之后噪声点从Am去除。(a)带有噪声点的背景在红色椭圆中。(b) Am去除噪声点的背景。

图9。使用Open3d去除点后的结果。
V. 扩大路边激光雷达探测范围
EXTENDING DETECTION RANGE OF ROADSIDE LIDAR
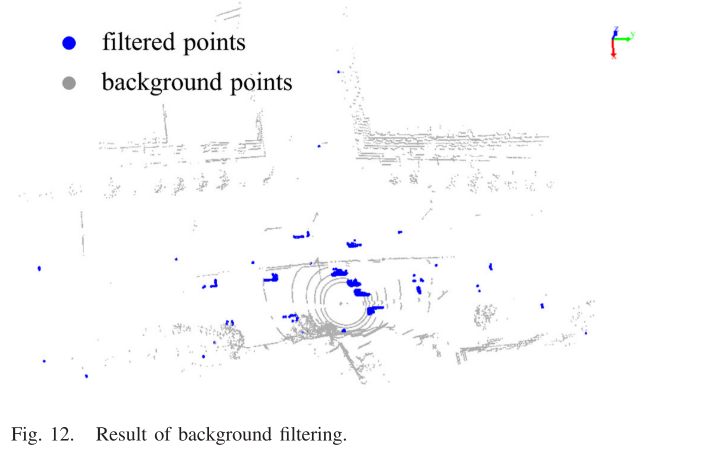
A. Background Filtering背景过滤
对于两步背景滤波,大部分背景点和噪声点都可以成功滤波,如图12所示。
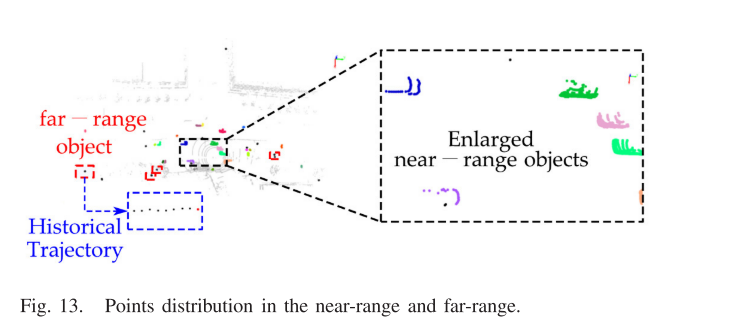
B. Detection 检测
对于近距离,使用DBSCAN算法检测车辆和道路用户。
对于远距离,点云稀疏,容易被近距离物体遮挡。对于道路用户或车辆,LiDAR传感器只会检测到一个或两个点,如图13中的红色矩形所示。
VII. CONCLUSIONS AND DISCUSSION
在本文中,我们提出了一种扩展路边激光雷达探测范围的方法。首先,构造一个静态背景作为漏斗来过滤背景点。在静态背景构建中,利用多帧点云数据覆盖激光雷达传感器的最大水平角和垂直角,最终获得背景信息。此外,对静态背景进行优化,以减少远距离背景点的缺失和噪声点的出现。与其他方法相比,本文提出的方法可以用较少的点云数据构造出更精确的静态背景。
相关文章:
CV——day78 读论文:通过静态背景构建扩展低通道路边雷达的探测距离(目标是规避风险)
Extending the Detection Range for Low-Channel Roadside LiDAR by Static Background Construction 通过静态背景构建扩展低通道路边雷达的探测距离I. INTRODUCTIONII. RELATED WORKA. LiDAR-Based 3-D Vehicle and Road User DetectionB. LiDAR Data Background FilteringC.…...
【编程入门】应用市场(go语言版)
背景 前面已输出多个系列: 《十余种编程语言做个计算器》 《十余种编程语言写2048小游戏》 《17种编程语言10种排序算法》 《十余种编程语言写博客系统》 《十余种编程语言写云笔记》 《N种编程语言做个记事本》 目标 为编程初学者打造入门学习项目,使…...
没有界面连接互联网方法)
Linux(openEuler)没有界面连接互联网方法
前言: 系统版本openEuleropenEuler-22.03-LTS-x86_64-dvd 我们在安装linux之后,一般都是无界面的情况。大部分情况都是需要自己安装界面的,如果路由器的情况下直接插上网络就好了。下面就开始介绍两种方法进行linxu网络的连接。 注意: 小编是使用的第一…...

第一天 软考中级--嵌入式系统设计师考试复习教程开始了
第一天 嵌入式系统设计师考试复习教程 第二天 软考中级--嵌入式系统设计师考试考试大纲解析 目录...

分享 10 个高频 Python 面试题
Python 很容易学会,但很难掌握。你可以在几天内了解它的基本语法,但是要能够用 Python 开发出足够好的商业软件,多年的实践是必须的。因为,无论你使用哪种编程语言,你都必须对其复杂的内部机制有足够的了解,…...
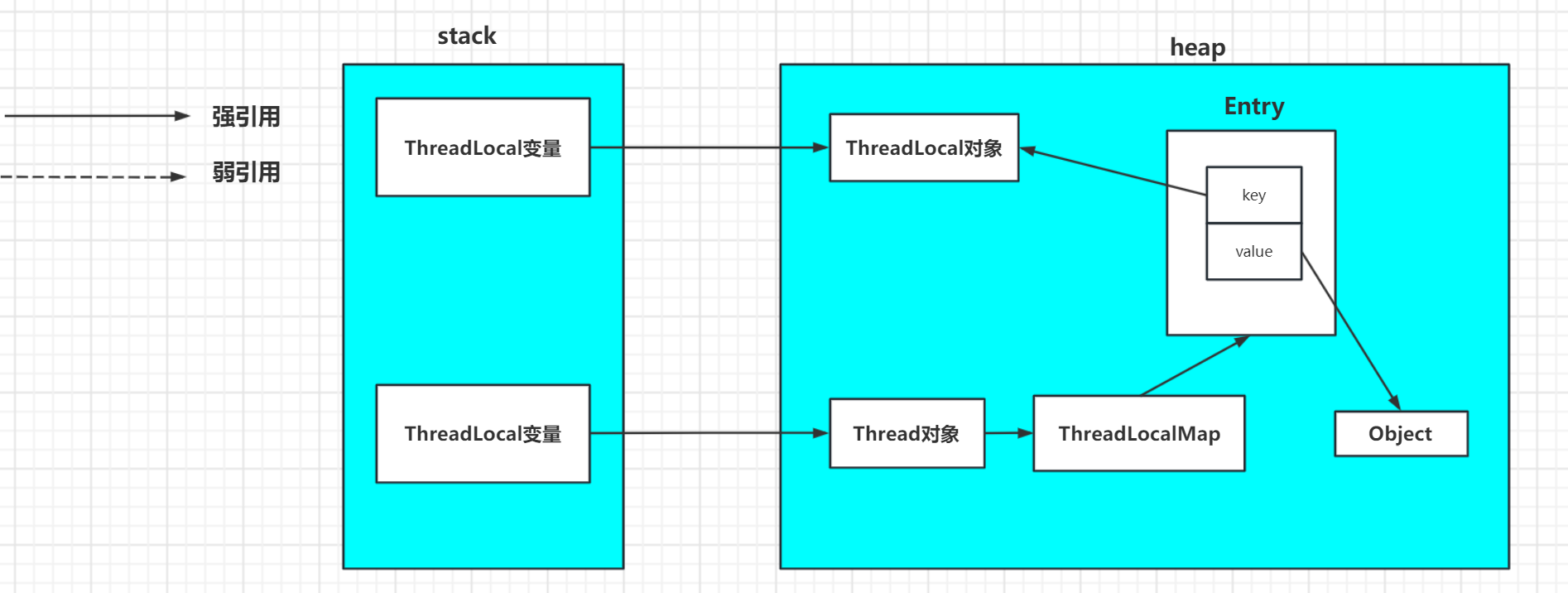
ThreadLocal原理、结构、源码解析
文章目录一、Thread简介1.什么是ThreadLocal2.为什么要是用ThreadLocal2.1Synchronized、Lock保证线程安全2.2ThreadLocal保证线程安全3.ThreadLocal和Synchronized的区别二、ThreadLocal原理1.Thread抽象内部结构2.ThreadLocal源码2.1Thread、ThreadLocal、ThreadLocalMap、En…...
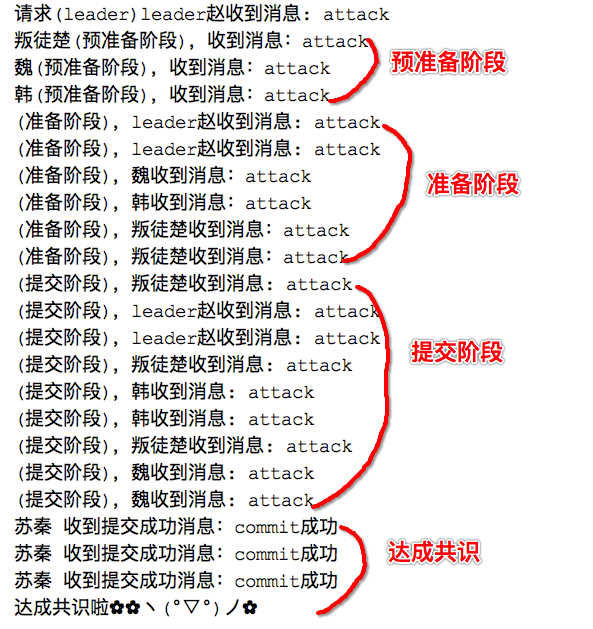
分布式之PBFT算法
写在前面 在分布式之拜占庭问题 一文中我们分析了拜占庭问题,并一起看了支持拜占庭容错的口信消息性和签名消息性算法,但是这两种算法都有一个非常严重的问题,就是消息数量太多,通信的成本太大,消息数量复杂度为O(n ^…...
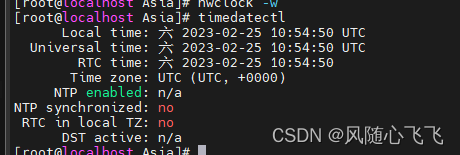
Linux 操作系统——查看/修改系统时区、时间、本地时间修改为UTC
文章目录1.背景描述2.知识储备3.解决步骤1. 查看当前时区2.修改设置Linux服务器时区3.复制相应的时区文件,替换系统时区文件;或者创建链接文件4. 查看和修改Linux的时间5. 硬件时间和系统时间的 相互同步1.背景描述 最近一个项目日期采用java8的LocalDa…...

CSS数据类型以及符号
css数据类型定义的是css属性中具有代表性的值,在规范的语法格式中,使用关键字外加一对 <和>表示,例如数值类型<number>、色值类型<color>等。 举个例子:background-image这个css属性语法结构如下: …...

LeetCode-54. 螺旋矩阵
题目来源 54. 螺旋矩阵 题目思路 while循环只遍历"环",不成环就不遍历了 四个边界 上边界 top : 0下边界 bottom : matrix.length - 1左边界 left : 0右边界 right : matrix[0].length - 1 矩阵不一定是方阵 top < bottom && left < r…...

【Python入门第十八天】Python For 循环
Python For 循环 for 循环用于迭代序列(即列表,元组,字典,集合或字符串)。 这与其他编程语言中的 for 关键字不太相似,而是更像其他面向对象编程语言中的迭代器方法。 通过使用 for 循环,我们…...

Qt图片定时滚动播放器
目录参考结构PicturePlay.promain.cpppictureplay.hpictureplay.cpppictureplay.ui效果源码参考 Qt图片浏览器 QT制作一个图片播放器 Qt中自适应的labelpixmap充满窗口后,无法缩小只能放大 可以显示jpg、jpeg、png、bmp。可以从电脑上拖动图到窗口并显示出来或者打开…...

李宏毅2023春季机器学习课程
目录2021&2022课程重磅须知我维护的其他项目更新日志课程地址课程资料直链课程作业直链其他优质课程2021&2022课程 CSDN Github 重磅须知 为方便所有网课资料与优质电子书籍的实时更新维护,创建一个在线实时网盘文件夹; 网盘获取方式&#…...

计算机操作系统知识点汇总
计算机操作系统选择填空题,300知识点,包含操作系统概论、处理机管理、内存管理、设备管理、文件管理等,为大学生期末创造奇迹提供无限可能 1、填空题 1、操作系统是对计算机资源进行管理的软件 2、操作系统是提供了处理机管理、 存储器管理…...

【离线数仓-8-数据仓库开发DWD层设计要点-交易域相关事实表】
离线数仓-8-数据仓库开发DWD层设计要点-交易域相关事实表离线数仓-8-数据仓库开发DWD层设计要点-交易域相关事实表一、DWD层设计要点二、交易域相关事实表1.交易域加购事务事实表1.加购事务事实表 前期梳理2.加购事务事实表 DDL表设计分析3.加购事务事实表 加载数据分析1.首日全…...
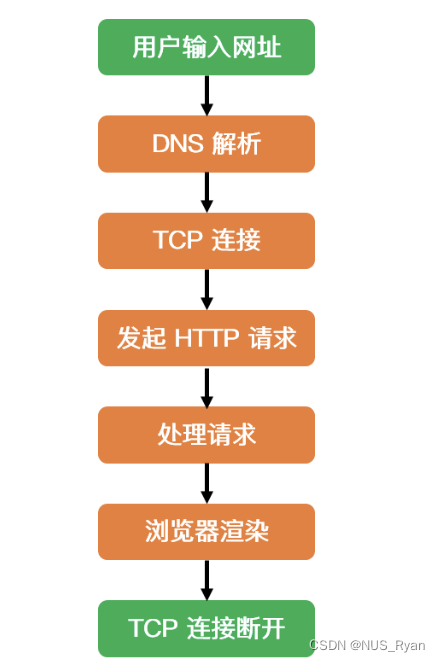
计算机网络(七):DNS协议和原理,DNS为什么用UDP,网页解析的全过程
文章目录一、什么是DNS二、DNS的作用三、DNS作用四、DNS为什么用UDP五、如果打开一个网站很慢,要如何排查六、网页解析的全过程一、什么是DNS DNS是域名系统的英文缩写,是一种组织成域层次结构的计算机和网络服务命名系统,用于TCP/IP网络。 …...
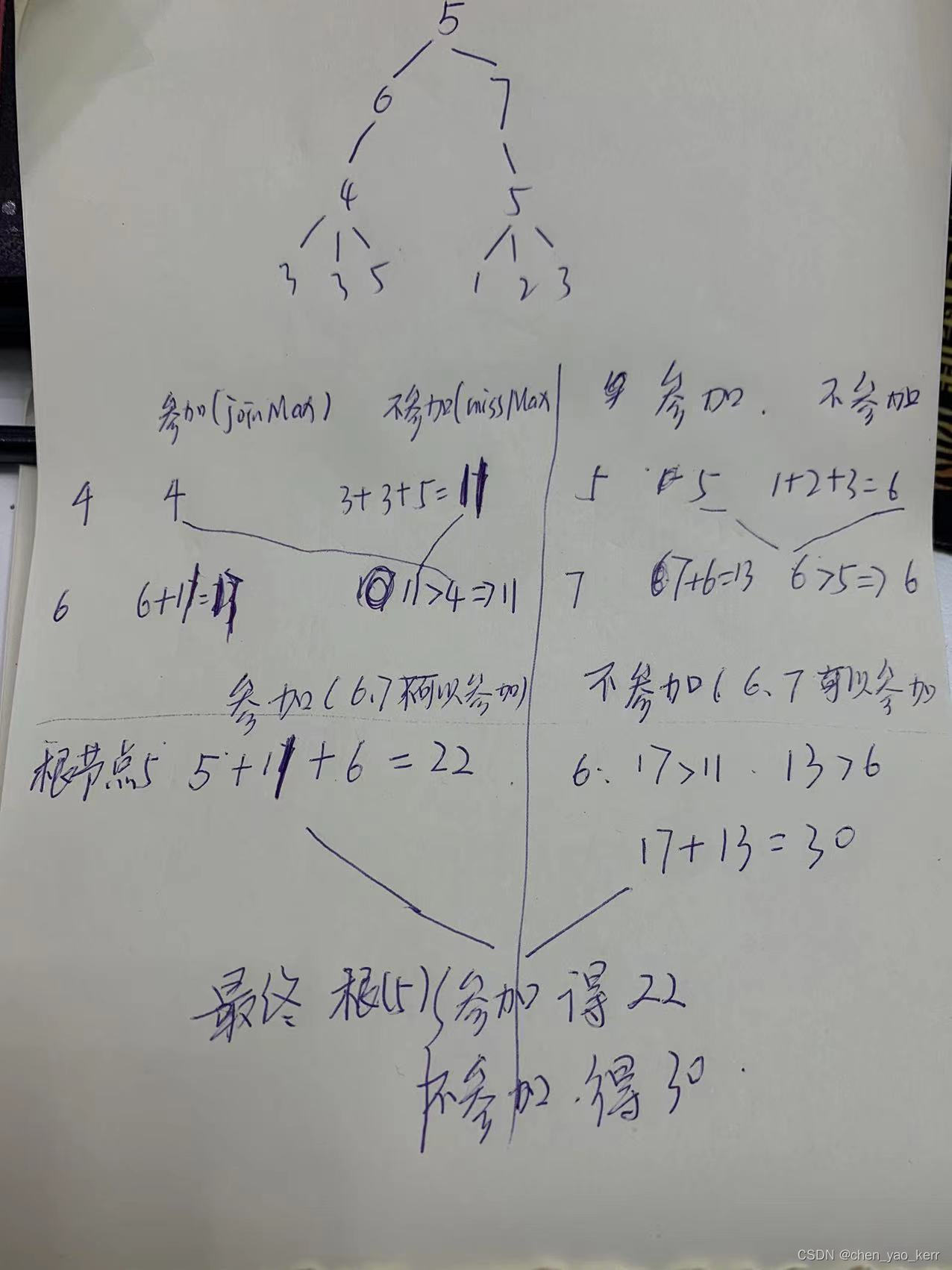
算法23:多叉树_派对的最大快乐值
公司的每个员工都符合 Employee 类的描述。整个公司的人员结构可以看作是一棵标准的、 没有环的多叉树。树的头节点是公司唯一的老板。除老板之外的每个员工都有唯一的直接上级。 叶节点是没有任何下属的基层员工(subordinates列表为空),除基层员工外,每…...

中国ETC行业市场规模及未来发展趋势
中国ETC行业市场规模及未来发展趋势编辑根据市场调研在线网发布的2023-2029年中国ETC行业发展策略分析及战略咨询研究报告分析:随着政府坚持实施绿色出行政策,ETC行业也受到了极大的支持。根据中国智能交通协会统计,2017年中国ETC行业市场规模…...
——只出现一次的数字)
每日刷题(一)——只出现一次的数字
前言 今天遇到一个位运算的题目,感觉很有意思,记录一下。 Question1 136. 只出现一次的数字 给你一个 非空 整数数组 nums ,除了某个元素只出现一次以外,其余每个元素均出现两次。找出那个只出现了一次的元素。 你必须设计并实…...
洛谷P5737 【深基7.例3】闰年展示 C语言/C++
【深基7.例3】闰年展示 题目描述 输入 x,yx,yx,y,输出 [x,y][x,y][x,y] 区间中闰年个数,并在下一行输出所有闰年年份数字,使用空格隔开。 输入格式 输入两个正整数 x,yx,yx,y,以空格隔开。 输出格式 第一行输出一个正整数&a…...

Python基础语法:访问器@property和修改器@xxx.setter
一、简介 访问器和修改器也是装饰器的一种。 property: 访问器,getter xxx.setter: 修改器,setter 访问器和修改器的根本目的是想将属性私有化,提供getter&setter去访问。 访问器和修改器能够做到访问属性其实在调用getter方法࿰…...

AMLP框架实战:基于MACE构建高精度机器学习势函数
1. 项目概述:当机器学习势函数遇上自动化管道在计算化学和材料科学领域,我们长久以来面临着一个核心矛盾:精度与效率的权衡。密度泛函理论(DFT)能提供接近实验的精度,但计算成本高昂,通常只能处…...
)
蓝牙抓包不求人:从HCI日志里‘挖’出Link Key的两种实用方法(附安卓路径)
蓝牙安全逆向实战:从HCI日志中提取Link Key的深度解析在蓝牙协议安全研究领域,Link Key作为设备配对认证的核心凭证,其获取方式一直是逆向工程师关注的焦点。许多安全审计场景下,我们往往只能获得加密后的HCI通信日志,…...

2026在线测评系统十大量表对比:信效度与场景全解析
【30s 核心摘要】2026 年在线测评成人才管理刚需,信效度与场景适配成选型核心。本文聚焦十大量表,从信度、效度、适配场景等维度深度对比,重点解析问卷星、北森、金数据等主流平台的量表能力与落地效果,为企业、高校及机构提供科学…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

科华UPS电源全品类汇总:选型与场景适配指南
科华UPS电源作为国内智慧电能领域的主流产品,覆盖家用、办公、机房、工业等全场景,产品系列丰富、规格齐全,但多数用户在选型时,常因分不清系列差异、功率适配、架构类型而踩坑。本文系统汇总科华UPS电源的核心分类、主流系列、核…...

Unity UI交互进阶:手把手教你打造一个支持单击、双击、长按的万能按钮组件
Unity UI交互进阶:手把手教你打造一个支持单击、双击、长按的万能按钮组件在游戏开发中,UI交互的流畅性和多样性直接影响玩家的游戏体验。想象一下,当你在开发一个RPG游戏的背包系统时,需要实现道具的单击查看详情、双击快速使用、…...

MobX社区资源大全:10个必备工具、插件和扩展库推荐 [特殊字符]
MobX社区资源大全:10个必备工具、插件和扩展库推荐 🚀 【免费下载链接】MobX-Docs-CN MobX 中文文档 项目地址: https://gitcode.com/gh_mirrors/mo/MobX-Docs-CN MobX作为一个简单、可扩展的状态管理库,已经成为React开发者不可或缺的…...

全球无障碍宣传日:iOS 26 辅助功能大升级,这些实用小功能你用过吗?
辅助功能发展与升级很多人对辅助功能的印象还停留在 "小白点",但随着 iPhone 进入全面屏时代,它逐渐变得陌生。实际上,Apple 每年都会为其增添功能,方便身体有障人士使用 iPhone。而且,这些功能不仅惠及有障…...

告别Selenium?手把手教你用Playwright录制脚本,5分钟搞定Web自动化测试
5分钟极速上手Playwright脚本录制:零代码实现Web自动化测试当产品经理突然丢给你一个刚上线的电商活动页,要求半小时内完成所有核心链路测试时,传统的手写Selenium脚本显然来不及。作为测试工程师,我最近发现微软开源的Playwright…...