Linux 错误处理(字符设备基础三)
在Linux字符设备驱动中,即使是最简单的注册字符设备,也存在注册失败的可能性,因此在之前编写的驱动代码中采用检查函数返回值的方式,确认函数是否成功执行
一、goto 语句
在编写驱动程序时,驱动程序应该提供函数执行失败后处理的能力。如果驱动程序中函数执行失败了,必须取消掉所有失败前的注册,否则内核会处于一个不稳定的状态,因为它包含了不存在代码的内部指针。在处理 Linux 错误时,最好使用goto 语句,goto 语句的使用示例如下所示:
int init my_init_function(void)
{int err;err = register_this(ptr1, "skull");if (err)goto fail_this;err = register_that(ptr2, "skull");if (err)goto fail_that;err = register_those(ptr3, "skull");if (err)goto fail_those;return 0;fail_those:unregister_that(ptr2, "skull");fail_that:unregister_this(ptr1, "skull");fail_this:return err;
}
在以上代码中试图注册 3 个虚构设备,goto 语句在失败情况下使用,对之前已经成功注册的设施进行注销。使用 goto 语句处理的时候,应该遵循“先进后出”的原则。
二、IS_ERR()
对于任何一个指针来说,必然存在三种情况,一种是合法指针,一种是NULL(也就是空指针),一种是错误指针(也就是无效指针)。在 Linux 内核中,所谓的错误指针已经指向了内核空间的最后一页,例如,对于一个 64 位系统来说,内核空间最后地址为0xffffffffffffffff,那么最后一页的地址是 0xfffffffffffff000~0xffffffffffffffff,这段地址是被保留的,如果指针落在这段地址之内,说明是错误的无效指针。
在 Linux 内核源码中实现了指针错误的处理机制,相关的函数接口主要有IS_ERR()、PTR_ERR()、ERR_PTR()等,其函数的源码在 include/linux/err.h 文件中,如下所示:
#define IS_ERR_VALUE(x) unlikely((unsigned long)(void *)(x) >= (unsigned long)-MAX_ERRNO)static inline void * __must_check ERR_PTR(long error)
{return (void *) error;
}static inline long __must_check PTR_ERR(__force const void *ptr)
{return (long) ptr;
}static inline bool __must_check IS_ERR(__force const void *ptr)
{return IS_ERR_VALUE((unsigned long)ptr);
}static inline bool __must_check IS_ERR_OR_NULL(__force const void *ptr)
{return unlikely(!ptr) || IS_ERR_VALUE((unsigned long)ptr);
}
如上所示,在 Linux 源码中 IS_ERR()函数其实就是判断指针是否出错,如果指针指向了内核空间的最后一页,就说明指针是一个无效指针,如果指针并不是落在内核空间的最后一页,就说明这指针是有效的。无效的指针能表示成一种负数的错误码,如果想知道这个指针是哪个错误码,使用 PTR_ERR 函数转化。0xfffffffffffff000~0xffffffffffffffff 这段地址和Linux错误码是一一对应的,内核错误码保存在 kernel\include\uapi\asm-generic\errno-base.h文件内
/* SPDX-License-Identifier: GPL-2.0 WITH Linux-syscall-note */
#ifndef _ASM_GENERIC_ERRNO_BASE_H
#define _ASM_GENERIC_ERRNO_BASE_H#define EPERM 1 /* Operation not permitted */
#define ENOENT 2 /* No such file or directory */
#define ESRCH 3 /* No such process */
#define EINTR 4 /* Interrupted system call */
#define EIO 5 /* I/O error */
#define ENXIO 6 /* No such device or address */
#define E2BIG 7 /* Argument list too long */
#define ENOEXEC 8 /* Exec format error */
#define EBADF 9 /* Bad file number */
#define ECHILD 10 /* No child processes */
#define EAGAIN 11 /* Try again */
#define ENOMEM 12 /* Out of memory */
#define EACCES 13 /* Permission denied */
#define EFAULT 14 /* Bad address */
#define ENOTBLK 15 /* Block device required */
#define EBUSY 16 /* Device or resource busy */
#define EEXIST 17 /* File exists */
#define EXDEV 18 /* Cross-device link */
#define ENODEV 19 /* No such device */
#define ENOTDIR 20 /* Not a directory */
#define EISDIR 21 /* Is a directory */
#define EINVAL 22 /* Invalid argument */
#define ENFILE 23 /* File table overflow */
#define EMFILE 24 /* Too many open files */
#define ENOTTY 25 /* Not a typewriter */
#define ETXTBSY 26 /* Text file busy */
#define EFBIG 27 /* File too large */
#define ENOSPC 28 /* No space left on device */
#define ESPIPE 29 /* Illegal seek */
#define EROFS 30 /* Read-only file system */
#define EMLINK 31 /* Too many links */
#define EPIPE 32 /* Broken pipe */
#define EDOM 33 /* Math argument out of domain of func */
#define ERANGE 34 /* Math result not representable */#endif
对于IS_ERR()的使用,实例代码如下所示:
myclass = class_create(THIS_MODULE, "myclass");
if (IS_ERR(myclass))
{ret = PTR_ERR(myclass);goto fail;
}
mydevice = device_create(myclass, NULL, MKDEV(major, 0), NULL, "simple-device");
if (IS_ERR(mydevice))
{class_destroy(myclass);ret = PTR_ERR(mydevice);goto fail;
}
在上述代码中,调用了 class_create()和 device_create()函数,必须使用IS_ERR()函数判断返回的指针是否是有效的,如果是无效的,需要调用 PTR_ERR()函数将无效指针转换为错误码,并进行错误码的返回。
相关文章:
)
Linux 错误处理(字符设备基础三)
在Linux字符设备驱动中,即使是最简单的注册字符设备,也存在注册失败的可能性,因此在之前编写的驱动代码中采用检查函数返回值的方式,确认函数是否成功执行 一、goto 语句 在编写驱动程序时,驱动程序应该提供函数执行失…...

STM32 PWM配置及呼吸灯
PWM的英文全称是"Pulse Width Modulation",中文翻译为"脉冲宽度调制"。 在PWM中可以调节的其实只有两个东西,一个叫做可调周期(调频率),另一个叫做占空比(高电平/周期)。 而…...

华为云 CodeArts Snap 智能编程助手 PyCharm 插件安装与使用指南
1 插件安装下载 1.1 搜索插件 打开 PyCharm,选择 File,点击 Settings。 选择 Plugins,点击 Marketplace,并在搜索框中输入 Huawei Cloud CodeArts Snap。 1.2 安装插件 如上图所示,点击 Install 按钮安装 Huawei Cl…...
SpringSecurity分布式安全框架
Spring Security是一个基于Spring框架的安全框架,它提供了全面的安全解决方案,包括用户认证和用户授权等Web应用安全性问题。Spring Security可以轻松扩展以满足自定义需求,它的真正强大之处在于它可以轻松扩展以满足自定义要求。 对于分布式…...

高速下载b站视频的解决方案
大家好,我是爱编程的喵喵。双985硕士毕业,现担任全栈工程师一职,热衷于将数据思维应用到工作与生活中。从事机器学习以及相关的前后端开发工作。曾在阿里云、科大讯飞、CCF等比赛获得多次Top名次。现为CSDN博客专家、人工智能领域优质创作者。喜欢通过博客创作的方式对所学的…...

Qt之彻底解决QSpinBox限定范围无效的问题
QSpinBox有个比较啃爹的问题,不管取值范围设置为多少,都能一直输入0,如下图所示: 当取值范围包含负数时,负号后也可以一直输入0,如下图所示: 还有就是当取值范围设置为10以上时,比如10~100,却可以输入1~9 虽然上述非法输入最终都未生效,当QSpinBox失去焦点时会显示为…...

Ktor vs Spring Boot:哪个框架能帮助你构建更高性能的 Web 应用?
文章首发地址 Ktor 和 Spring Boot 是两个在 Kotlin Web 开发中常用的框架,它们有一些共同点,也有一些区别。 共同点: 都支持 Kotlin:Ktor 和 Spring Boot 都能够完全支持 Kotlin 语言,这使得开发者可以使用 Kotlin …...
【Ubuntu18.04】激光雷达与相机联合标定(Livox+HIKROBOT)(一)
LivoxHIKROBOT联合标定 引言1 海康机器人HIKROBOT SDK二次开发并封装ROS1.1 介绍1.2 安装MVS SDK1.3 封装ROS packge 2 览沃Livox SDK二次开发并封装ROS3 相机雷达联合标定3.1 环境配置3.1.1 安装依赖——PCL 安装3.1.2 安装依赖——Eigen 安装3.1.3 安装依赖——Ceres-solver …...
hadoop伪分布式安装部署
首先jdk安装完毕 jdk安装文档参考: Linux 环境下安装JDK1.8并配置环境变量_linux安装jdk1.8并配置环境变量_Xi-Yuan的博客-CSDN博客 准备好hadoop的安装包 我的下载地址如下: We Transfer Gratuit. Envoi scuris de gros fichiers. 将hadoop包上传到随…...

前端视角看 Docker : 加速开发和部署的利器
Docker 是一个开源的容器化平台,大大的降低了运维相关的工作。在日常开发中,中小公司很少有专职运维,所以在开发中通过使用 Docker,前端相关工作可以更加高效地构建、打包、部署和运行应用程序。此系列将从前端的视角出发…...
JVM相关的面试题
一、什么是程序计数器 二、简要的介绍一下堆 三、什么是虚拟机栈 四、能不能解释下方法区 五、你听过直接内存吗? 六、什么是类加载器,类加载器有哪些 七、什么是双亲委派模型 八、JVM为什么采用双亲委派机制 九、类装载的执行过程 十、对象什么时候被垃…...

HTML、CSS和jQuery:实现图片折叠展开的效果
在网页设计和开发中,我们经常需要实现一些动态特效来增加页面的吸引力和交互性。其中,图片折叠展开特效是一种常见但又很有趣的技巧。通过这种特效,我们可以让图片在用户的操作下折叠或展开,从而展示更多的内容或细节。以下介绍如…...
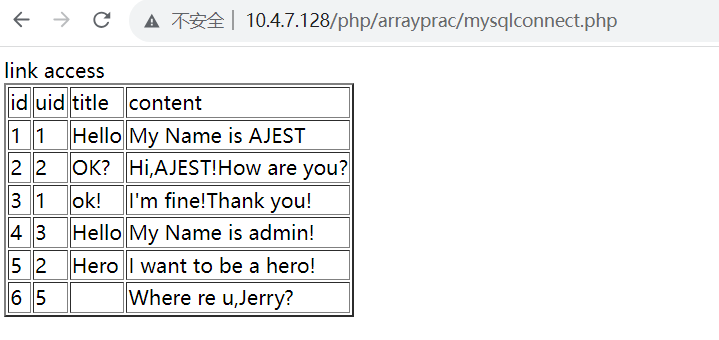
php简单后门实现及php连接数据库
php简单后门实现 代码 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>easybackdoor</title>…...

IOS课程笔记[6] 基础控件
UILabel 控件 frame 设置尺寸 [lb setFrame:CGRectMake(5, 0, 400, 40)];Font 字体设置 [lb setFont:[UIFont systemFontOfSize:20.f]] [lb setFont:[UIFont boldSystemFontOfSize:25.f]]; [lb setFont:[UIFont italicSystemFontOfSize:23.f]];背景色 [lb setBackgroundC…...
XPath使用)
python爬虫入门(五)XPath使用
对于网页的节点来说,它可以定义 id、class 或其他属性。而且节点之间还有层次关系,在网页中可以通过 XPath 或 CSS 选择器来定位一个或多个节点。在页面解析时,利用 XPath 或 CSS 选择器来提取某个节点,然后再调用相应方法获取它的…...

【广州华锐互动】VR消防员模拟灭火:身临其境的火场救援
随着科技的不断发展,虚拟现实(VR)技术已经逐渐渗透到各个领域,为我们带来了前所未有的沉浸式体验。在这其中,VR模拟消防员灭火体验无疑是一种极具创新性和实用性的应用。通过这项技术,人们可以亲身体验到消…...
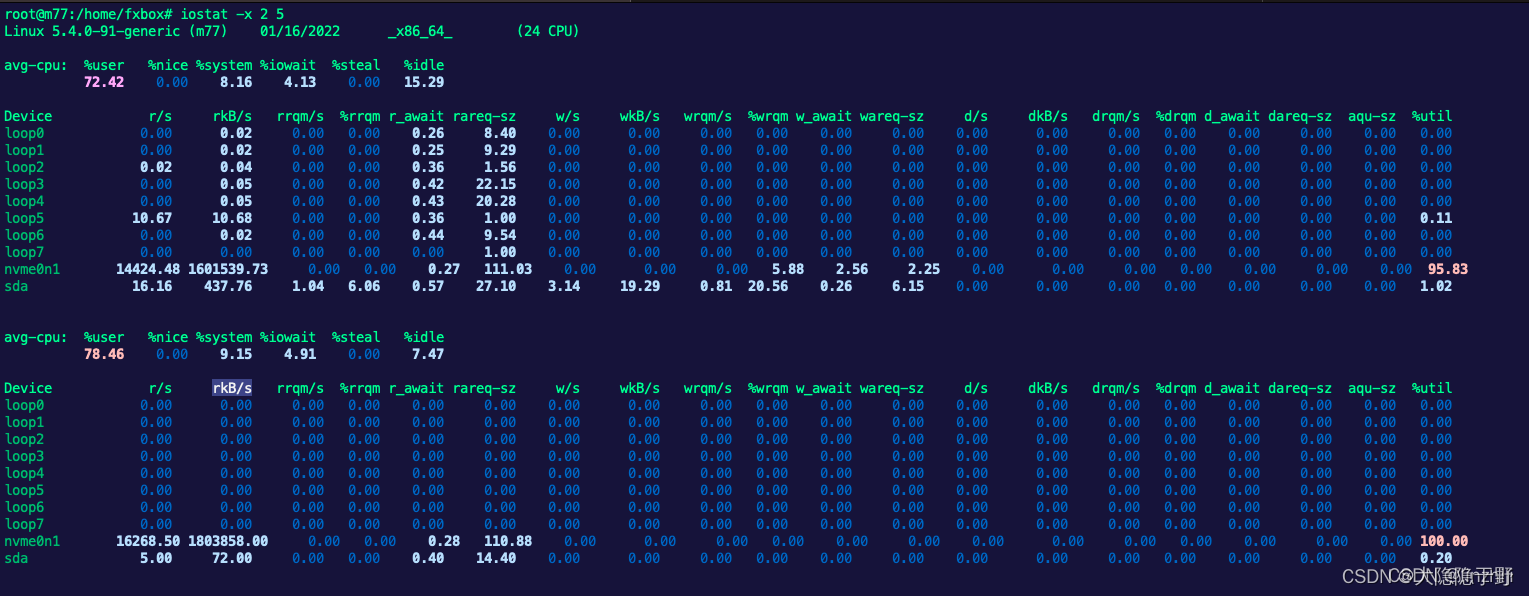
NFS性能瓶颈分析
前言 atop – run it with -d option or press d to toggle the disk stats view. iostat – try it with the -xm 2 options for extended statistics, in megabytes, and in two-second intervals. iotop – top-like I/O monitor. Try it with the -oPa options to show the…...

Java中配置RabbitMQ基本步骤
在Java中配置RabbitMQ,需要遵循以下步骤: 1.添加依赖 在项目的pom.xml文件中添加RabbitMQ的Java客户端依赖: <dependency><groupId>com.rabbitmq</groupId><artifactId>amqp-client</artifactId><versio…...

Ingress典型配置
Ingress 是 Kubernetes 中用于管理 HTTP 和 HTTPS 路由的资源。以下是一个典型的 Ingress 配置示例,用于将流量引导到两个不同的服务: apiVersion: networking.k8s.io/v1 kind: Ingress metadata:name: example-ingress spec:rules:- host: example.com…...
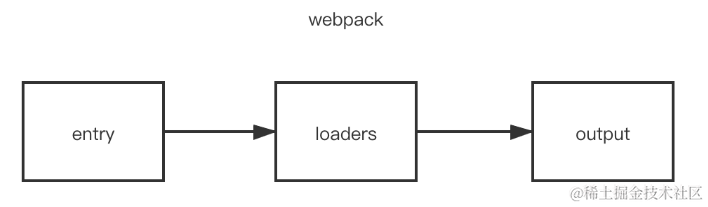
webpack中常见的Loader解决了什么问题?
一、是什么 loader 用于对模块的"源代码"进行转换,在 import 或"加载"模块时预处理文件 webpack做的事情,仅仅是分析出各种模块的依赖关系,然后形成资源列表,最终打包生成到指定的文件中。如下图所示&#…...

从零玩转GD32单片机USART:485总线通信实战与源码解析
1. 初识GD32单片机与USART通信 第一次接触GD32单片机时,我被它强大的外设功能所吸引。作为国产MCU的优秀代表,GD32在性能上完全不输国际大厂产品,而价格却亲民得多。记得当时为了调试一个简单的串口通信功能,我整整折腾了两天&am…...

WarcraftHelper开源解决方案:魔兽争霸3跨系统优化完全指南
WarcraftHelper开源解决方案:魔兽争霸3跨系统优化完全指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper作为一款开源解决…...

快速上手MinerU:从镜像启动到完成第一次文档解析的全流程指南
快速上手MinerU:从镜像启动到完成第一次文档解析的全流程指南 1. 引言:为什么选择MinerU进行文档解析 在日常办公和学习中,我们经常需要处理各种文档——从扫描的合同文件到学术论文,从财务报表到演示文稿。传统的手动录入和整理…...

OpenClaw技能开发入门:为千问3.5-9B扩展新能力
OpenClaw技能开发入门:为千问3.5-9B扩展新能力 1. 为什么需要自定义OpenClaw技能 去年夏天,我偶然发现OpenClaw可以帮我自动整理电脑上的照片——按日期分类、重命名、甚至删除模糊的废片。这让我意识到,如果能自己开发技能,就能…...

MM32 MCU烧录故障排查指南:从硬件到软件的全面解析
1. 硬件问题排查:从电源到接口的全面检查 遇到MM32 MCU烧录失败时,硬件问题往往是首要排查方向。我遇到过不少新手朋友一上来就怀疑芯片质量问题,结果折腾半天发现是电源没接好。硬件问题排查建议按照"供电→接口→调试器"的顺序进…...

在PHP中处理字符串连接和插值的多种方法
一、字符串连接方法1. 点号运算符(.)语法:通过.连接字符串或变量。示例:123$str1 "Hello";$str2 "World";echo $str1 . " " . $str2; // 输出 "Hello World"特点:简单直接&…...
)
用Go语言搞GIS开发?手把手教你用Gogeo库处理10万+要素的空间分析(附性能对比)
用Go语言突破GIS性能瓶颈:Gogeo库处理10万要素的实战指南 当你在凌晨三点盯着进度条卡在78%的ArcGIS界面,咖啡杯已经见底,而项目截止日期就在几小时后——这种绝望每个GIS开发者都深有体会。传统桌面软件处理大规模空间数据时的性能瓶颈&…...

OpenClaw隐私方案:Qwen2.5-VL-7B本地处理医疗影像数据
OpenClaw隐私方案:Qwen2.5-VL-7B本地处理医疗影像数据 1. 为什么医疗影像需要本地化处理 去年我在帮一家牙科诊所设计AI辅助诊断系统时,遇到了一个棘手问题:他们的X光片包含患者面部特征和牙科记录,直接上传到公有云存在隐私风险…...

OpenClaw+千问3.5-35B-A3B-FP8:智能邮件分类回复系统
OpenClaw千问3.5-35B-A3B-FP8:智能邮件分类回复系统 1. 为什么需要自动化邮件处理 每天早晨打开邮箱,看到堆积如山的未读邮件时,那种窒息感我太熟悉了。作为技术从业者,我的邮箱常年被订阅的技术周报、开源项目更新、会议邀请函…...

OpenClaw内存优化:Qwen3-32B在24G显存下的高效利用技巧
OpenClaw内存优化:Qwen3-32B在24G显存下的高效利用技巧 1. 为什么需要关注显存优化? 当我第一次在RTX 4090D上部署Qwen3-32B模型时,本以为24GB显存足够应对各种任务。但实际运行OpenClaw后,很快就遇到了显存溢出的问题——一个简…...