驱动开发day4(实现通过字符设备驱动的分布实现编写LED驱动,实现设备文件的绑定)
头文件(head.h)
#ifndef __HEAD_H__
#define __HEAD_H__
#define PHY_LED1_MODER 0x50006000
#define PHY_LED2_MODER 0x50007000
#define PHY_LED3_MODER 0x50006000
#define PHY_LED1_ODR 0x50006014
#define PHY_LED2_ODR 0x50007014
#define PHY_LED3_ODR 0x50006014
#define PHY_RCC 0x50000A28
//构建开灯关灯的功能码
#define LED_ON _IO('l',1)
#define LED_OFF _IO('l',0)
#endifc文件:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include "head.h"
int main(int argc, char const *argv[])
{char buf[128] = "";int a;int fd = open("/dev/mycdev1", O_RDWR);if (fd < 0){printf("打开设备文件失败\n");return -1;}printf("打开设备文件成功\n");while (1){printf("请输入要进行的操作,0(关灯),1(开灯) >");scanf("%d", &a);switch (a){case 1:ioctl(fd, LED_ON);break;case 0:ioctl(fd, LED_OFF);break;}}close(fd);return 0;
}#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/device.h>
#include <linux/cdev.h>
#include <linux/slab.h>
#include <linux/io.h>
#include <linux/uaccess.h>
#include "head.h"
struct cdev *cdev;
unsigned int major = 0;
unsigned int minor = 0;
dev_t devno;
// 定义RCC控制器指针指向映射后的虚拟内存
unsigned int *vir_rcc;
// LED1定义两个指针指向映射后的虚拟内存
unsigned int *vir_moder_led1;
unsigned int *vir_odr_led1;
// LED2定义两个指针指向映射后的虚拟内存
unsigned int *vir_moder_led2;
unsigned int *vir_odr_led2;
// LED3定义两个指针指向映射后的虚拟内存
unsigned int *vir_moder_led3;
unsigned int *vir_odr_led3;
struct class *cls;
struct device *dev;
int mycdev_open(struct inode *inode, struct file *file)
{// 获取打开的文件的次设备号int min = MINOR(inode->i_rdev);file->private_data = (void *)min;printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
long mycdev_ioctl(struct file *file, unsigned int cmd, unsigned long args)
{// 获取文件的次设备号int min = (int)file->private_data;switch (min){case 0://操作LED1switch(cmd){case LED_ON:(*vir_odr_led1) |= (0x1 << 10); // LED1开灯break;case LED_OFF:(*vir_odr_led1) &= (~(0x1 << 10)); // LED1关灯break;}break;case 1://操作LED2switch(cmd){case LED_ON:(*vir_odr_led2) |= (0x1 << 10); // LED2开灯break;case LED_OFF:(*vir_odr_led2) &= (~(0x1 << 10)); // LED2关灯break;}break;case 2://操作LED3switch(cmd){case LED_ON:(*vir_odr_led3) |= (0x1 << 10); // LED3开灯break;case LED_OFF:(*vir_odr_led3) &= (~(0x1 << 10)); // LED3关灯break;}break;}return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
// 定义操作方法结构体变量赋值
struct file_operations fops = {.open = mycdev_open,.unlocked_ioctl = mycdev_ioctl,.release = mycdev_close,};
static int __init mycdev_init(void)
{int ret;// 1.申请一个对象空间 cdev_alloccdev = cdev_alloc();if (cdev == NULL){printk("申请字符设备驱动对象失败");ret = -EFAULT;goto cont1;}printk("字符设备驱动对象申请成功\n");// 2.初始化对象 cdev_initcdev_init(cdev, &fops);// 3.申请设备号 register_chrdev_region()/alloc_chrdev_region()if (major == 0) // 动态申请模拟{ret = alloc_chrdev_region(&devno, minor, 3, "mychrdev");if (ret){printk("动态申请设备号失败\n");goto cont2;}major = MAJOR(devno); // 根据设备号获取主设备号minor = MINOR(devno); // 根据设备号获取次设备号}else // 静态申请模拟{ret = register_chrdev_region(MKDEV(major, minor), 3, "mychrdev");if (ret){printk("静态指定设备号失败\n");goto cont2;}}printk("设备号申请成功\n");// 4.注册驱动对象 cdev_addret = cdev_add(cdev, MKDEV(major, minor), 3);if (ret){printk("注册驱动对象失败\n");goto cont3;}printk("注册字符设备驱动对象成功\n");// 5.向上提交目录 class_createcls = class_create(THIS_MODULE, "mychrdev");if (IS_ERR(cls)){printk("向上提交目录失败\n");goto cont4;}printk("向上提交目录成功\n");// 6.向上提交设备节点信息 device_createint i;for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "mycdev%d", i);if (IS_ERR(dev)){printk("向上提交设备节点失败\n");goto cont5;}}printk("向上提交设备节点信息成功\n");// RCC控制器地址映射vir_rcc = ioremap(PHY_RCC, 4);if (vir_rcc == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -1;}// LED1进行寄存器的地址映射vir_moder_led1 = ioremap(PHY_LED1_MODER, 4);if (vir_moder_led1 == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -1;}vir_odr_led1 = ioremap(PHY_LED1_ODR, 4);if (vir_odr_led1 == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -1;}printk("LED1寄存器内存映射成功\n");// LED2进行寄存器的地址映射vir_moder_led2 = ioremap(PHY_LED2_MODER, 4);if (vir_moder_led2 == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -1;}vir_odr_led2 = ioremap(PHY_LED2_ODR, 4);if (vir_odr_led2 == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -1;}printk("LED2寄存器内存映射成功\n");// LED3进行寄存器的地址映射vir_moder_led3 = vir_moder_led1;if (vir_moder_led3 == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -1;}vir_odr_led3 = vir_odr_led1;if (vir_odr_led3 == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -1;}printk("LED3寄存器内存映射成功\n");// RCC寄存器初始化(*vir_rcc) |= (0x3 << 4); // GPIOE/GPIOF控制器时钟使能// LED1寄存器初始化(*vir_moder_led1) &= (~(0x3 << 20)); // MODER[21:20]->00(*vir_moder_led1) |= (0x1 << 20); // MODER[21:20]->01(*vir_odr_led1) &= (~(0x1 << 10)); // 默认关灯// LED2寄存器初始化(*vir_moder_led2) &= (~(0x3 << 20)); // MODER[21:20]->00(*vir_moder_led2) |= (0x1 << 20); // MODER[21:20]->01(*vir_odr_led2) &= (~(0x1 << 10)); // 默认关灯// LED3寄存器初始化(*vir_moder_led3) &= (~(0x3 << 16)); // MODER[17:16]->00(*vir_moder_led3) |= (0x1 << 16); // MODER[17:16]->01(*vir_odr_led3) &= (~(0x1 << 8)); // 默认关灯return 0;
cont5:// 将提交成功的节点信息释放for (--i; i > 0; i--){device_destroy(cls, MKDEV(major, i));}// 销毁目录class_destroy(cls);
cont4:cdev_del(cdev);
cont3:unregister_chrdev_region(MKDEV(major, minor), 3);
cont2:kfree(cdev);
cont1:return ret;
}
static void __exit mycdev_exit(void)
{// 取消RCC控制器内存映射iounmap(vir_rcc);// 取消LED1内存映射iounmap(vir_moder_led1);iounmap(vir_odr_led1);// 取消LED2内存映射iounmap(vir_moder_led2);iounmap(vir_odr_led2);// 1.销毁设备节点信息int i;for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}// 2.销毁目录class_destroy(cls);// 3.注销字符设备驱动对象cdev_del(cdev);// 4.释放设备号unregister_chrdev_region(MKDEV(major, minor), 3);// 5.释放申请到的字符设备驱动对象空间kfree(cdev);
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");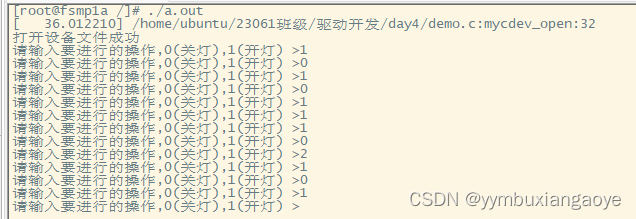

相关文章:
驱动开发day4(实现通过字符设备驱动的分布实现编写LED驱动,实现设备文件的绑定)
头文件(head.h) #ifndef __HEAD_H__ #define __HEAD_H__ #define PHY_LED1_MODER 0x50006000 #define PHY_LED2_MODER 0x50007000 #define PHY_LED3_MODER 0x50006000 #define PHY_LED1_ODR 0x50006014 #define PHY_LED2_ODR 0x50007014 #define PHY_LE…...
)
《深入浅出.NET框架设计与实现》阅读笔记(一)
.NET CLI概述 命令说明dotnet add将包或引用添加到.NET项目中dotnet build构建.NET项目,并编译为IL二进制文件dotnet clean清理.NET项目的构建输出dotnet help显示命令行帮助dotnet list罗列项目中的yinyongdotnet publish发布项目,用于部署dotnet sln修…...
)
Flutter 类似onResume 监听,解决入场动画卡顿(2)
接着完善上一篇内容,上一篇我们是能监听到初次进入路由页面节点,往往还想监听从当前路由跳转到其他路由后,再返回到当前路由页面,上一篇内容就无法满足当前需求了,不过我们完全可以按照上一篇的原理实现这个需求。 直…...
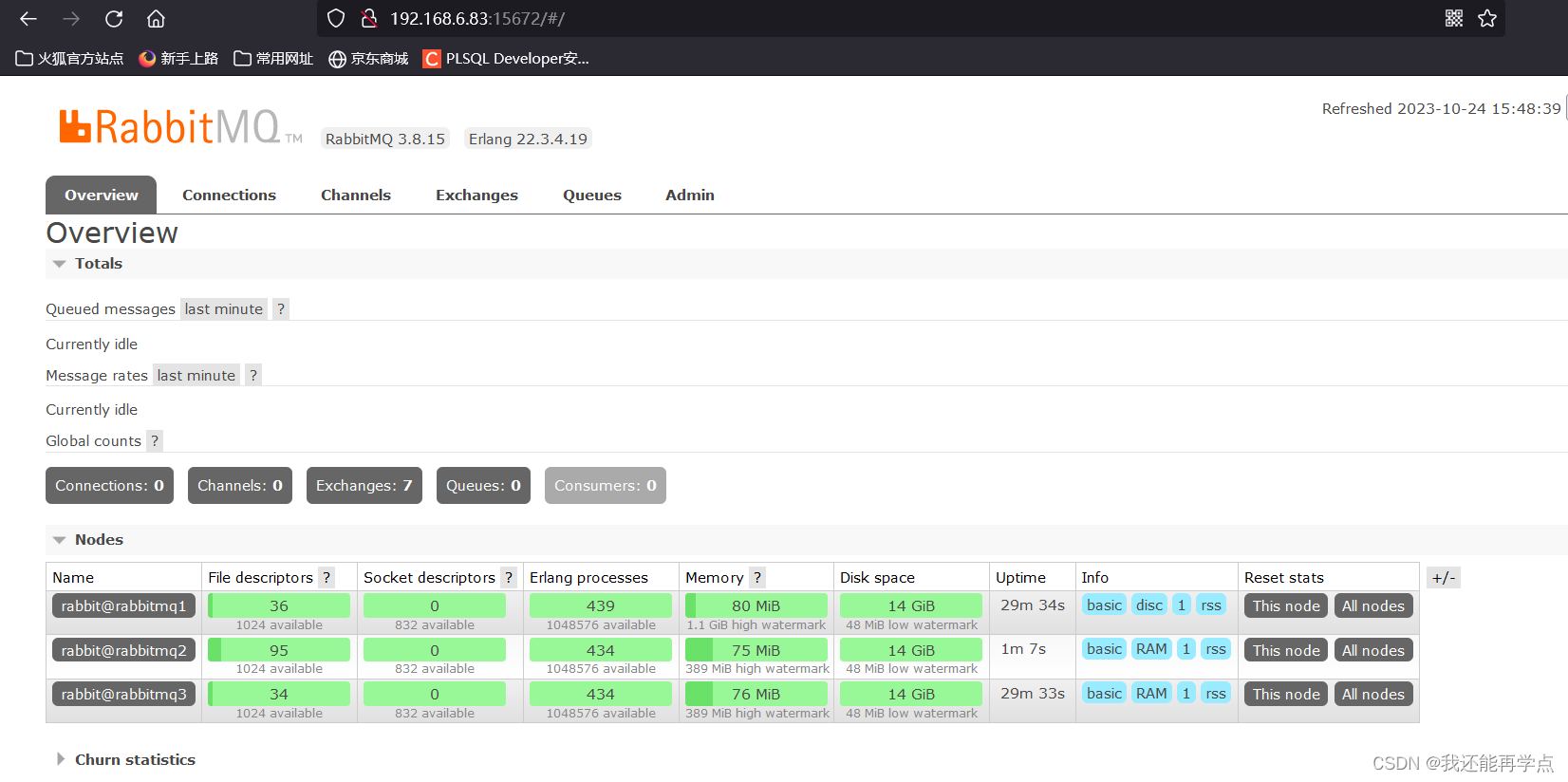
rabbitmq-3.8.15集群、集群镜像模式安装部署
目录 一、环境 1、映射、域名、三墙 2、Erlang和socat安装(三台服务器都实行) 二、部署三台rabbitmq-3.8.15实例 1、rabbitmq官网下载地址 : 2、解压rabbitmq 3、添加系统变量 4、启动web插件、启动rabbitmq 5、在rabbitmq1上添加用…...

import导入顺序杂乱的问题
我们经常会遇到项目中的import语句顺序混乱的问题。这不仅会影响代码的可读性,还可能使我们代码在提交的时候产生不必要的冲突。 解决方案 eslint-plugin-import 开始我调研了一下eslint-plugin-import插件。这款插件的排序逻辑是这样: builtin: 这代…...
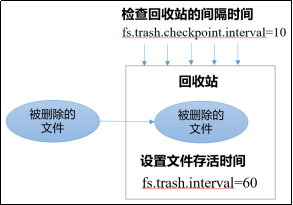
Hadoop3教程(二十六):(生产调优篇)NameNode核心参数配置与回收站的启用
文章目录 (143)NameNode内存配置(144)NN心跳并发配置(145)开启回收站参考文献 (143)NameNode内存配置 每个文件块(的元数据等)在内存中大概 占用150byte&…...
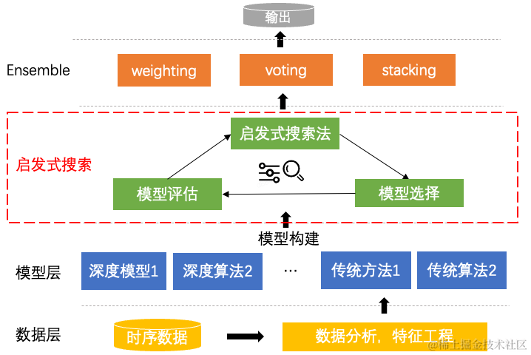
PaddleX场景实战:PP-TS在电压预测场景上的应用
时间序列是按照时间发生的先后顺序进行排列的数据点序列,简称时序。时间序列预测即运用历史的多维数据进行统计分析,推测出事物未来的发展趋势。时间序列预测是最常见的时序问题之一,在很多行业都有其应用,且通常时序预测效果对业…...
pdf误删恢复如何恢复?分享4种恢复方法!
如何将pdf误删恢复?使用电脑的时候,经常会需要使用到pdf文件,但是有时候,因为一些操作上的失误,我们会丢失一些重要的文件。如果你不小心将pdf误删了,该如何进行恢复呢? PDF文件丢失的原因可以…...

简析新能源汽车充电桩设计与应用
叶根胜 安科瑞电气股份有限公司 上海嘉定 201801 摘要:本文针对新能源汽车充电桩建设工作进行探究,采用案例分析法、文献查阅法,指出了新能源汽车充电桩建设存在的问题,阐述了充电桩建设与优化的对策。研究表明:目前…...

Java零基础入门-算术运算符
本文旨在帮助零基础的读者快速了解Java中的算术运算符,包括基本的加减乘除运算符、取余运算符、自增自减运算符等常见的数学运算符。 在学习本文前,需要先掌握基本的Java语法,包括数据类型、变量、赋值语句等。 前言 在编写Java程序时&…...

java实现hbase数据导出
1. HBase-client方式实现 1.1 依赖 <!--HBase依赖坐标--><dependency><groupId>org.apache.hbase</groupId><artifactId>hbase-client</artifactId><version>1.2.6</version></dependency><dependency><group…...

Unity之ShaderGraph如何实现旋涡效果
前言 今天我们来通过ShaderGraph来实现一个旋涡的效果 如下图所示: 主要节点 Distance:返回输入 A 和输入 B 的值之间的欧几里德距离。除了其他方面的用途,这对于计算空间中两点之间的距离很有用,通常用于计算有符号距离函数 (…...
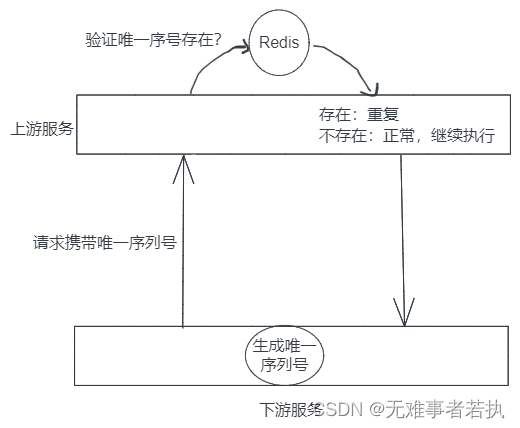
【分布式】: 幂等性和实现方式
【分布式】: 幂等性和实现方式 幂等(idempotent、idempotence)是一个数学与计算机学概念, 常见于抽象代数中。在编程中一个幂等操作的特点是其任意多次执行所产生的影响均与一次执行的影响相同。幂等函数,或幂等方法,是…...
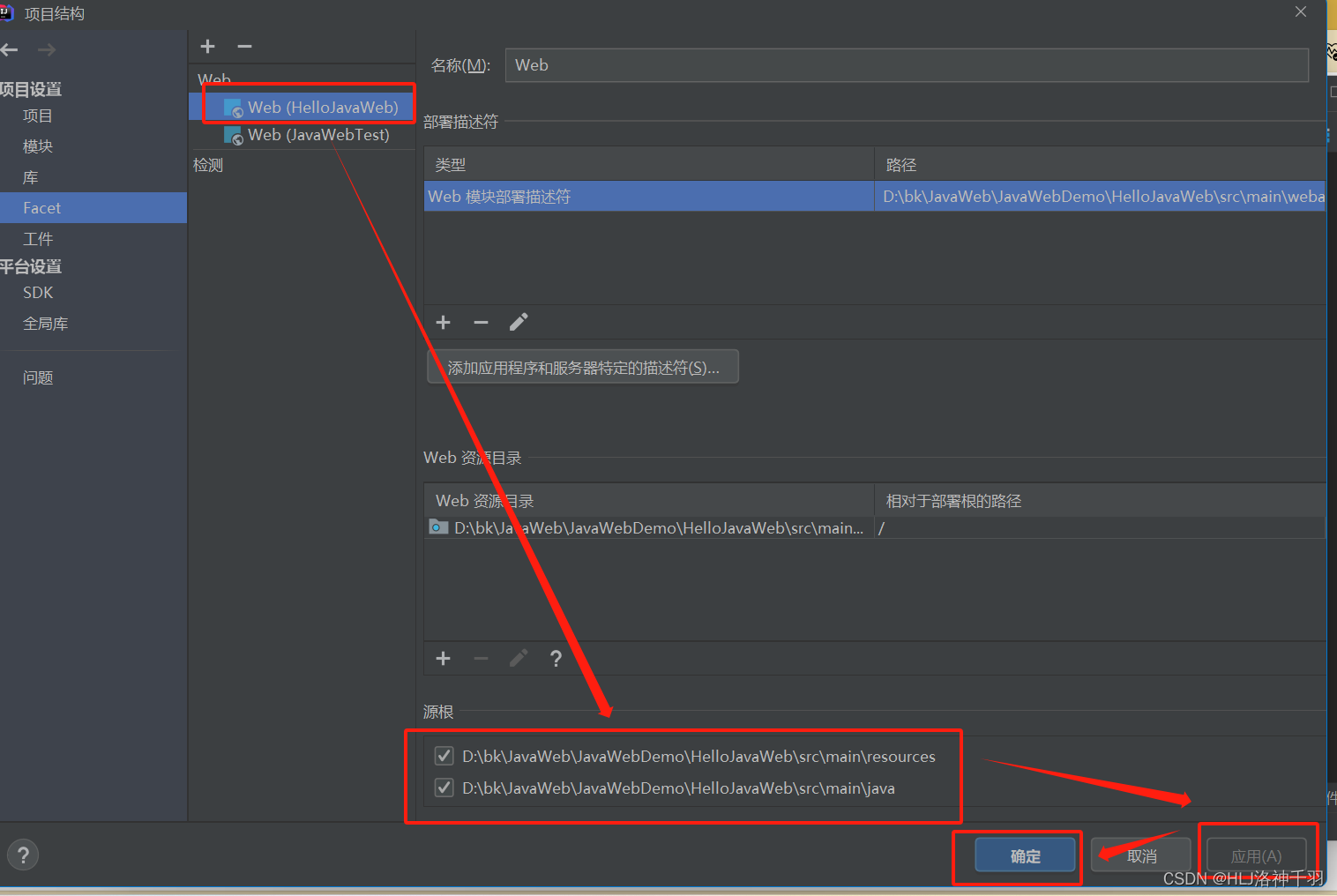
idea 设置serlvet 类模板(快捷生成servlet类)
我的版本是idea2020.3.4,博客中有相应安装教程,其他版本设置类似: 1.选择文件-->设置 2.选择编辑器-->文件和代码模板-->其他 3.选择Web-->Servlet Annotated Class.java-->复制相应模板,下面顺便设置了注释模板 …...
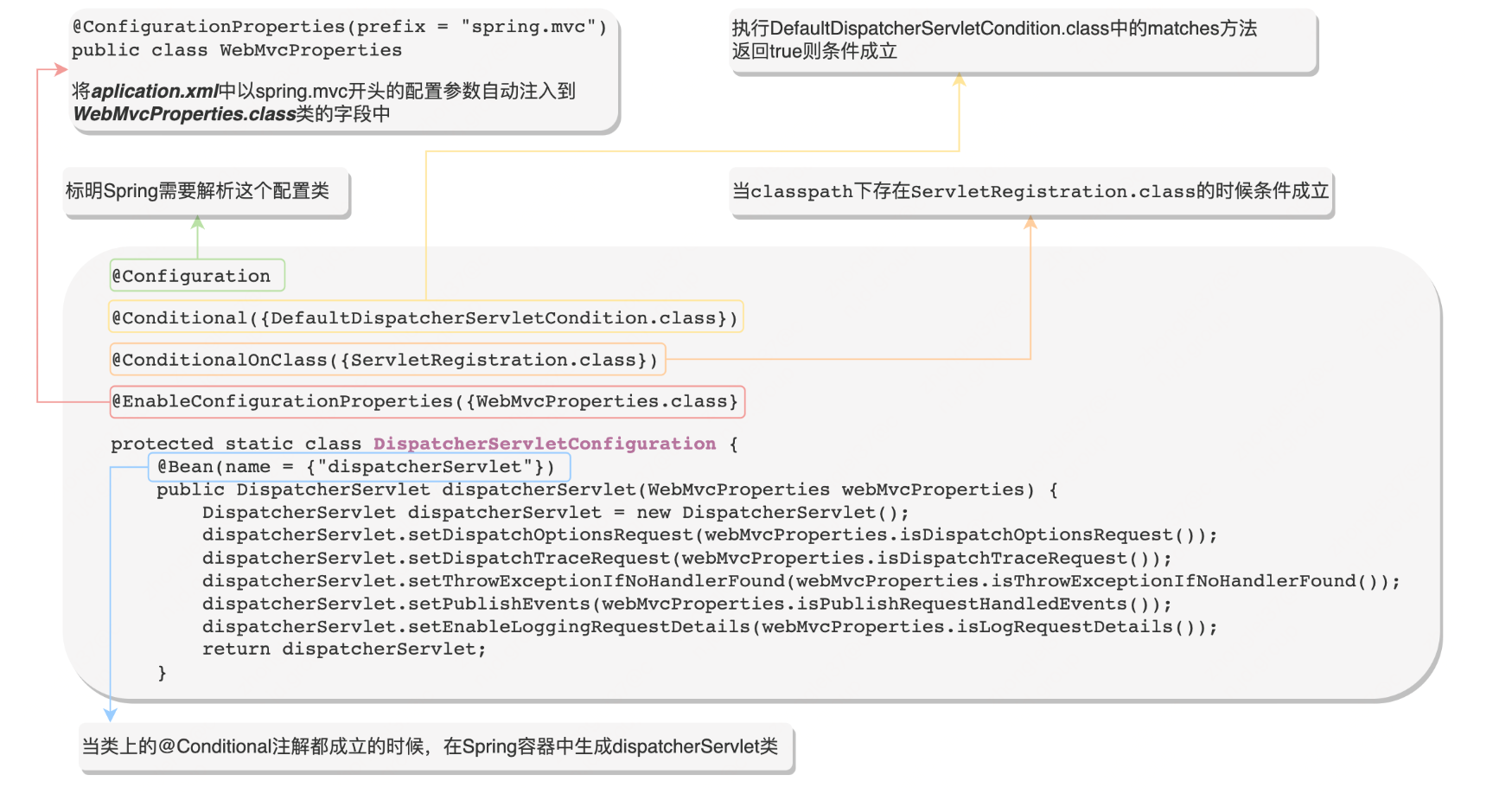
SpringBoot自动配置原理解析 | 京东物流技术团队
1: 什么是SpringBoot自动配置 首先介绍一下什么是SpringBoot,SpringBoost是基于Spring框架开发出来的功能更强大的Java程序开发框架,其最主要的特点是:能使程序开发者快速搭建一套开发环境。SpringBoot能将主流的开发框架(例如Sp…...
AOP 笔记
AOP【面向切面编程】 作用:在不惊动原始设计的基础上进行功能增强。 无侵入式编程 连接点:程序执行的任意位置,SpringAOP中,理解为方法的执行。 切入点:匹配连接点的式子,要追加功能的方法 通知(写在通…...
)
微信小程序导航退回及跳转 传参(navigateBack,navigateTo)
一、uniapp navigateBack 退回上一级 当前页面-传递参数 uni.$emit(update, params)uni.navigateBack({delta: 1});退回的页面-接收参数 可以写在 onLoad 和 onShow 里面 onLoad(o) {uni.$on(update, function(e) {//参数e}}onShow() {}返回前两级 uni.navigateBack({delta: 2}…...

python实例代码介绍python基础知识
TODO: 知识点仍有待整理 import 使用 import 关键字可以让你选择性地导入所需的模块,而不必导入整个模块库。这样可以减少内存占用和加载时间,尤其是当你只需要使用模块中的某些功能时。 同时,使用 import 可以提高代码的可读性和可维护性&…...
【每日一题】掷骰子等于目标和的方法数
文章目录 Tag题目来源题目解读解题思路方法一:动态规划 写在最后 Tag 【动态规划】【数组】 题目来源 1155. 掷骰子等于目标和的方法数 题目解读 你手里有 n 个一样的骰子,每个骰子都有 k 个面,分别标号 1 到 n。给定三个整数 n࿰…...

霸王条款惹品牌争议,京东双11站在商家对立面?
作者 | 江北 来源 | 洞见新研社 双11活动第一天,京东就站上了风口浪尖。 与烘焙烤箱品牌海氏的话题接连登上微博热搜,海氏控诉京东滥用市场竞争地位,破坏市场竞争秩序。在海氏的声明中,京东的行为让吃瓜群众大开眼界:…...

双核Delfino架构解析:如何解决复杂实时控制系统的性能瓶颈
1. 项目概述:从“双核”到“创新架构”的深度解构最近在和一些做工业控制、新能源以及高端医疗器械的朋友交流时,发现一个词被反复提及,那就是“双核Delfino”。乍一听,这像是一个具体的芯片型号,但深入聊下去…...

3分钟解锁音乐自由:ncmdump让网易云音乐NCM文件随处播放
3分钟解锁音乐自由:ncmdump让网易云音乐NCM文件随处播放 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的歌曲只能在特定客户端播放而烦恼吗?当您精心收藏的音乐被NCM加密格式束缚&…...

探索Qt高级停靠系统:打造灵活强大的用户界面
探索Qt高级停靠系统:打造灵活强大的用户界面 【下载地址】Qt-Advanced-Docking-System使用教程与示例代码 Qt-Advanced-Docking-System 使用教程与示例代码本仓库提供了一个关于如何使用 Qt-Advanced-Docking-System 的详细教程及示例代码 项目地址: https://gitc…...

IL-4/IL-4R信号通路及其靶向治疗研究进展
摘要白介素-4(interleukin-4, IL-4)是一种多效细胞因子,通过特异性结合细胞表面的IL-4受体(IL-4 receptor, IL-4R)发挥生物学效应。IL-4/IL-4R信号通路在特应性皮炎、哮喘及恶性肿瘤等疾病的病理过程中发挥重要作用。近…...

dropin-minimal-css框架质量评估标准:如何选择最适合的CSS框架
dropin-minimal-css框架质量评估标准:如何选择最适合的CSS框架 【免费下载链接】dropin-minimal-css Drop-in switcher for previewing minimal CSS frameworks 项目地址: https://gitcode.com/gh_mirrors/dr/dropin-minimal-css 在当今前端开发的世界中&…...

视频怎么转文字?文案如何高效提取?2026最实用的方法和工具全测评
为什么要把视频转成文字在内容创作、会议记录、课程整理等场景中,视频转文字的需求越来越普遍。相比直接看视频,文字版本可以快速检索关键信息、便于引用、降低信息获取的时间成本。2026年,AI转录技术已经足够成熟,一条视频从上传…...

汽车电子工程师必看:ISO 16750-2023全套标准解读与实战应用指南
汽车电子工程师必看:ISO 16750-2023全套标准解读与实战应用指南 在汽车电子领域,每一次技术迭代都伴随着更严苛的可靠性要求。去年参与某新能源车企的域控制器项目时,我们团队曾因忽视化学负荷测试导致批量产品在盐雾试验中失效——这个价值七…...

Windows驱动存储管理终极指南:DriverStore Explorer高效清理系统驱动垃圾
Windows驱动存储管理终极指南:DriverStore Explorer高效清理系统驱动垃圾 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer Windows驱动存储管理是系统管理员和高级用户面临的…...

7B秒杀70B!大模型微调秘籍全解:从理论到实战,玩转高效适配!
本文系统介绍了大模型微调的理论框架与实践流程。阐述了微调的必要性,即弥补通用大模型在领域知识、输出格式及行为对齐上的不足,并说明微调效果可超越更大参数的未微调模型。文章深入解析了微调原理,对比了全参数微调与高效微调(…...
)
NotebookLM评论反馈功能全链路拆解(从Prompt响应延迟到语义锚定失效的7个致命断点)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM评论反馈功能的架构全景与设计初衷 NotebookLM 的评论反馈功能并非简单的 UI 层叠加,而是贯穿数据流、状态管理与协同语义理解的深度集成模块。其核心目标是让用户在阅读、引用或…...