Monocular arbitrary moving object discovery and segmentation 论文阅读
基本信息
题目:Monocular Arbitrary Moving Object Discovery and Segmentation
作者:
来源:BMVC
时间:2021
代码地址:https://github.com/michalneoral/Raptor
Abstract
我们提出了一种发现和分割场景中独立移动的物体或其部分的方法。给定三个单眼视频帧,该方法输出语义上有意义的区域,即对应于整个对象的区域,即使只有其中一部分移动。
基于 CNN 的端到端方法的架构称为 Raptor,它结合了语义和运动主干,将其输出传递到最终的区域分割网络。语义主干以与类无关的方式进行训练,以便泛化到训练数据之外的对象类。运动分支的核心是根据光流、光学扩展、单深度和估计的相机运动计算出的几何成本量。
对所提出的架构在 KITTI、DAVIS-Moving 和 YTVOSMoving 数据集上的实例运动分割和二元动静态分割问题的评估表明,所提出的方法在所有数据集上实现了最先进的结果,并且能够很好地泛化到各种环境。对于KITTI数据集,我们提供了升级的实例运动分割注释,涵盖了所有运动对象。
Introduction
只有单个相机可用(单目视觉),相机不一定是静态的,并且处理需要是因果的。目标是发现并分割所有独立移动的“物体”。我们将该问题称为移动对象发现和分割 – MODaS
Object define
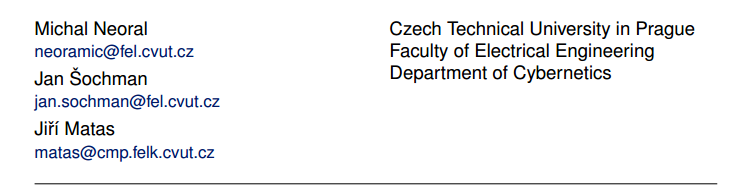
MODaS 规范的关键是实例或对象的定义。常用的定义(参见第 2 节)是几何定义——一组经历相同刚性运动并在空间上连接的像素。此定义在两种重要情况下失败:(i) 当对象不是刚性的时,以及 (ii) 当两个语义不同但邻近的对象移动相似时(参见图 1)。对于应用程序来说,过度分割和分割不足的情况都是有问题的。例如,当一个人移动她的腿时,应该返回整个人的轮廓,因为要预测位置的是人,而不是腿。因此,移动对象在几何上被定义,其部分独立于相机运动而移动,并且在语义上,它是语义上有意义的实体。
Object discovery
对象发现与现代检测器密切相关,因为它们不仅输出位置,还输出可能数百个类别的分割[18]。在这方面,我们更进一步,使用以与类无关的方式训练的检测器[14],其中所有类都合并为单个“对象”类。这样,检测器可以更好地概括训练期间未见过的类别的对象(例如,当训练数据仅包含马时检测到骆驼)。为了将其与已知类的检测问题区分开来,我们将其称为对象发现。
Independent motion
独立运动。当一个物体(或其部分)的表观运动不是相机自我运动的结果时,该物体(或其一部分)被认为是独立移动的。一般来说,从单目相机识别此类运动是一个不适定问题。由于光流本身只是 3D 场景运动的 2D 投影,因此其解释是不明确的。单目深度估计的最新进展提供了克服这些模糊性的可能方法。对于统计数据与训练数据集相似的场景,单一深度可以作为真实深度的有用先验,并且能够消除观察到的运动的歧义[46]
Contribution
我们提出了一种名为 Raptor 的基于 CNN 的架构,它基于语义和几何处理的新颖组合。我们表明,与类无关的语义部分导致了语义上有意义的对象的发现,而几何运动成本量处理解决了明显的运动歧义。该网络发现刚性和非刚性移动对象及其实例分割掩模。与大多数方法 [14、15、20、31、33、38、46] 不同,Raptor 架构使用三个框架进行 MODaS。我们是第一个将几何部分扩展到两帧处理之外的人。
我们表明,对两个方向(向前和向后)的几何特征的估计提高了 Raptor 的发现和分割输出的精度
Architecture
所提出的 Raptor 架构如图 2 所示。它有两个输入分支:一个生成语义特征(绿色),另一个使用运动成本量 (MCV) 生成运动特征(橙色)。它们的输出被连接并发送到混合任务级联(HTC)[11]头,该头生成移动对象掩模。

Semantic backbone
语义主干(图 2 (a))改编自 DetectoRS 架构 [29]。它围绕递归特征金字塔主干 (RFP) 和可切换空洞卷积 (SAC) 构建。我们使用主干网的 ResNet-50 变体。
为了将检测管道转换为对象发现方法,以便它更好地推广到未知类,我们遵循[14]的类不可知训练的思想。我们在对象分割问题 [21] 上训练主干网络和临时 HTC 头,将所有对象类别合并为单个“对象”类别。本次训练不存在运动分支。 [14] 中已经表明,这种方法可以更好地预测未知类。训练结束后,HTC 头被丢弃,语义主干权重被固定。
Motion branch
运动分支(图 2 (b))的灵感来自于最近的刚体运动分割方法 [46]。它使用单眼深度 D t D_t Dt 、光流 F t − > t + 1 F_{t->t+1} Ft−>t+1、光学扩展 E t + 1 E_{t+1} Et+1 和自我运动估计 [ R t + 1 , t t + 1 ] [R_{t+1},t_{t+1}] [Rt+1,tt+1] 作为前向运动成本体积 (MCV) 构造的输入。我们使用 F t − > t − 1 F_{t->t-1} Ft−>t−1、 E t − 1 E_{t-1} Et−1 和 [ R t − 1 , t t − 1 ] [R_{t-1},t_{t-1}] [Rt−1,tt−1] 进一步计算“向后”MCV。和[46]一样,我们为每个方向构建一个 14 通道 MCV,包括:对极几何的每像素 Samson 误差、每像素旋转单应性重投影误差、3D P+P 成本、深度对比度成本、重建 3D来自光流的场景点、校正运动场、光流和光学扩展的不确定性以及 3D 角度 P+P 成本。这些成本旨在指示与估计的自我运动的不一致,同时处理共面或共线运动或自我运动简并的各种模糊性。
运动分支主干架构与语义主干架构类似,但它不是基于 ResNet-50,而是基于 ResNet-18 DetectoRS 架构构建。输入是每个方向的 14 通道运动成本量。图像特征不直接输入到运动主干。向前和向后方向的MCV一一穿过运动主干。运动分支是用另一个临时 HTC 头单独预训练的,没有 MODaS 问题的语义主干。训练结束后,临时 HTC 头再次被丢弃,运动主干被固定。
Semantic + motion
语义 + 运动(图 2 (b)) 两个分支的输出被连接起来。
语义分支产生五个特征张量 F 1 / 4 、 F 1 / 8 、 F 1 / 16 、 F 1 / 32 、 F 1 / 64 F_{1/4} 、F_{1/8}、 F_{1/16} 、 F_{1/32} 、 F_{1/64} F1/4、F1/8、F1/16、F1/32、F1/64 ,空间分辨率递减,每个特征张量有 256 个通道。
原始运动分支生成每个方向 256 个通道的特征张量。面对训练设备的内存限制,我们通过额外的 1x1 卷积层将输出标准化为 128 通道。然后,两个方向的输出与语义主干的特征连接并馈送到 HTC 头(总共 512 个通道)。由于 MCV 仅针对刚体运动而设计,因此它会报告铰接对象的仅部分不一致问题。 HTC 头的任务是将这些部分不一致与语义特征结合在一起,并输出完整的运动对象分割掩模。
两个分支在最终训练中都是固定的,并且只有最终的 HTC 头部接受了移动物体发现的训练。运动分支归一化 1x1 CNN 层在训练的最后阶段与 HTC 一起进行训练。
Improvement of MCV components
MCV 组件的改进。运动分支使用多种外部算法来生成其输入。我们还小心翼翼地将它们带到文献中最先进的版本。我们使用 RAFT [32] 代替原来较旧且较弱的 VCN [45] 光流估计器。我们在广泛的数据集上训练 RAFT(鲁棒视觉挑战风格,如先前的作品 [24, 39] 展示了增强的泛化能力)。使用此光流估计,我们还重新训练了光学扩展部分。
与原始 VCN 不同,RAFT 不输出超出范围的置信度,这是 MCV 中的通道之一。我们将其替换为类似的前向-后向一致性成本,该成本针对 MCV 计算为 F t − > t + 1 + w a r p ( F t + 1 − > t ; F t − > t + 1 ) F_{t->t+1} + warp(F_{t+1->t} ;F_{t->t+1}) Ft−>t+1+warp(Ft+1−>t;Ft−>t+1),其中 warp 操作转换流 $F_{t+1->t}到框架 t。我们不设置该值的阈值。
Experiments
MCV 的构建需要内部相机参数和相机运动 [R;t] 的估计,以分解基本矩阵。我们选择 NG-RANSAC [6] 进行基本矩阵估计,因为它允许在未来的工作中进行可能的端到端训练。
对于不包含相机固有参数的数据集,我们将焦距设置为 1 / m a x ( I w i d t h , I h e i g h t ) 1/max(I_{width},I_{height}) 1/max(Iwidth,Iheight),并将主点设置为图像的中点。
Failure case
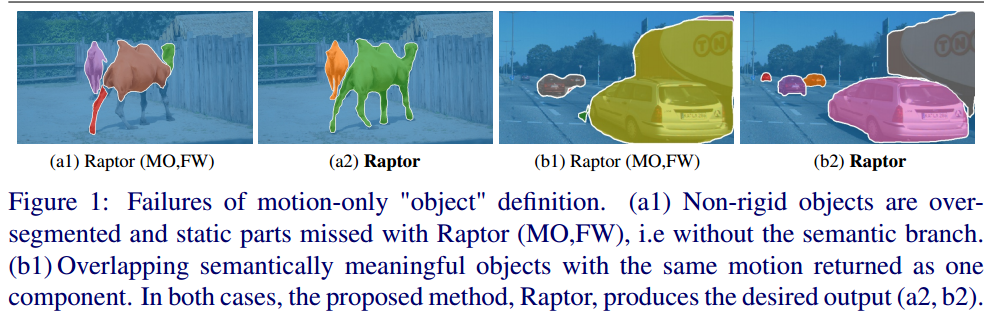
(见图 5)最常见的问题是缓慢移动的物体、远离相机的物体或靠近扩展点的物体。它们的检测可能需要更长的时间整合。观察到的另一个问题是合并不明确的对象实例(带包的人、摩托车及其驾驶员等)。 Raptor 还与明显被遮挡的对象(树叶、条形后面……)作斗争,有时会返回静态但语义上有意义的对象。
相关文章:
Monocular arbitrary moving object discovery and segmentation 论文阅读
基本信息 题目:Monocular Arbitrary Moving Object Discovery and Segmentation 作者: 来源:BMVC 时间:2021 代码地址:https://github.com/michalneoral/Raptor Abstract 我们提出了一种发现和分割场景中独立移动的…...

ROS | 命名空间
文章目录 概述一、定义介绍二、原理解读1.命名空间2.调用规则概述 本节详细介绍了ROS中的命名空间机制原理和使用。 一、定义介绍 在ROS(Robot Operating System)中,命名空间是一种用于组织和区分节点、话题、服务和参数等资源的层次结构。命名空间使用斜线(/)作为分隔符…...

【中国数据】中国基础矢量数据(shp格式)
数据目录 数据举例 数据获取 专栏分享常用的地理空间数据,包括矢量数据、栅格数据、统计数据等,订阅专栏后,从私信查收专栏完整数据包,持续同步更新。...

Docker:创建主从复制的Redis集群
一、Redis集群 在实际项目里,一般不会简单地只在一台服务器上部署Redis服务器,因为单台Redis服务器不能满足高并发的压力,另外如果该服务器或Redis服务器失效,整个系统就可能崩溃。项目里一般会用主从复制的模式来提升性能&#x…...

c++ 智能指针
1. 起源 c++ 把内存的控制权对开发人员开放,让程序显式的控制内存,这样能够快速的定位到占用的内存,完成释放的工作。但是这样也会引发一些问题,也就是普通指针的隐患: 1.1 野指针 出现野指针的有几个地方 : 指针声明而未初始化,此时指针的将会随机指向内存已经被释放…...

【vue3】依赖注 provide、inject(父组件与儿子、孙子、曾孙子组件之间的传值)
一、基本用法: //父组件 import { ref, provide } from vue const radio ref<string>(red) provide(myColor,radio) //注入依赖//儿子组件、孙子组件、曾孙子组件 import { inject } from vue import type { Ref } from vue; const myColor inject<Ref&l…...

docker 部署tig监控服务
前言 tig对应的服务是influxdb grafana telegraf 此架构比传统的promethus架构更为简洁,虽然influxdb开源方案没有集群部署,但是对于中小型服务监控需求该方案简单高效 本文以docker-compose来演示这套监控体系的快速搭建和效果。 部署 docker-compos…...
ETL工具与数据处理的关系
ETL工具与数据处理之间存在密切的关系。数据处理是指对原始数据进行清洗、整理、加工和分析等操作,以便生成有用的信息和洞察力。而ETL工具则提供了一种自动化和可视化的方式来执行这些数据处理任务。通过ETL工具,用户可以定义数据抽取、转换和加载的规则…...

Flink几个性能调优
1 配置内存 操作场景 Flink是依赖内存计算,计算过程中内存不够对Flink的执行效率影响很大。可以通过监控GC(Garbage Collection),评估内存使用及剩余情况来判断内存是否变成性能瓶颈,并根据情况优化。 监控节点进程的…...

后端工程进阶| 青训营笔记
这是我参与「第五届青训营 」伴学笔记创作活动的第 2 天 并发编程 协程Goroutine通道Channel锁Lock 并发基础 串行程序与并发程序:串行程序特指只能被顺序执行的指令列表,并发程序则是可以被并发执行的两个及以上的串行程序的综合体。并发程序与并行程序…...
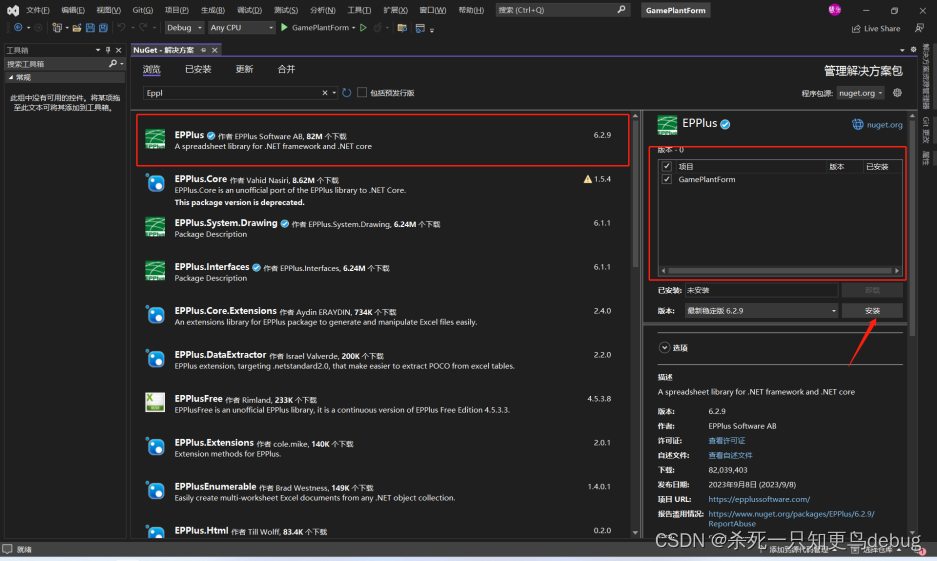
EPPlus库的安装和使用 C# 中 Excel的导入和导出
安装 工具栏->NuGet 包管理器->管理解决方案的NuGet程序包 安装到当前项目中 使用 将 DataGridView 数据导出为Excel 首先,需要将数据DataGridView对象转换为DataTable private void btnExport_Click(object sender, EventArgs e) {// 1.将当前页面的data…...
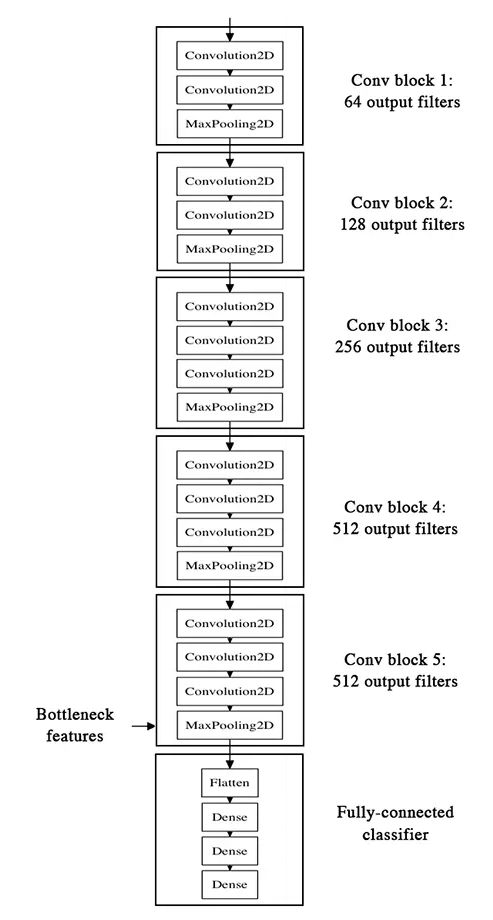
深度学习使用Keras进行迁移学习提升网络性能
上一篇文章我们用自己定义的模型来解决了二分类问题,在20个回合的训练之后得到了大约74%的准确率,一方面是我们的epoch太小的原因,另外一方面也是由于模型太简单,结构简单,故而不能做太复杂的事情,那么怎么提升预测的准确率了?一个有效的方法就是迁移学习。 迁移学习其…...
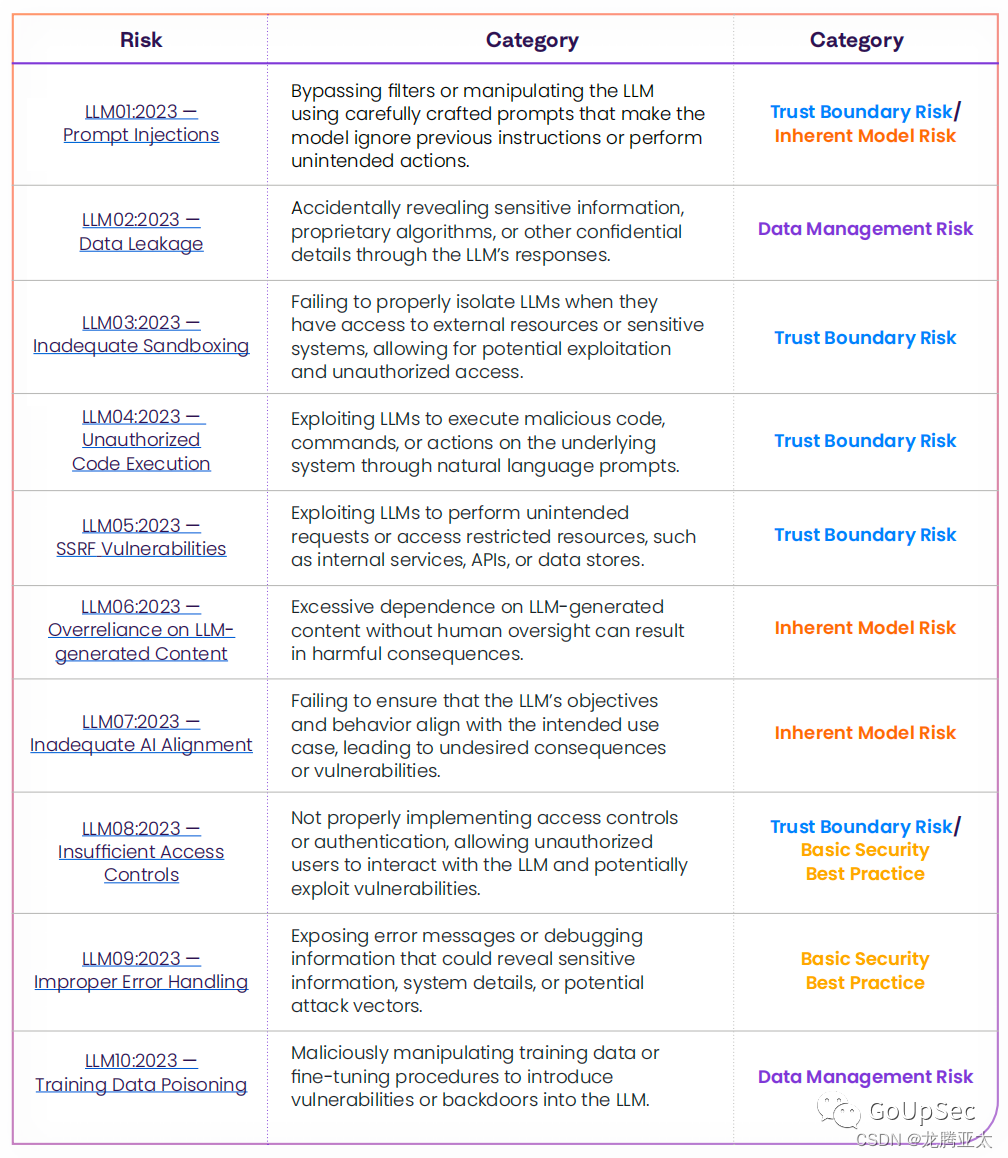
越流行的大语言模型越不安全
源自:GoUpSec “人工智能技术与咨询” 发布 安全研究人员用OpenSSF记分卡对GitHub上50个最流行的生成式AI大语言模型项目的安全性进行了评估,结果发现越流行的大语言模型越危险。 近日,安全研究人员用OpenSSF记分卡对GitHub上50个最流…...

搜维尔科技:伦敦艺术家利用Varjo头显捕捉盲人隐藏的梦想
在伦敦举行的弗里泽艺术博览会上,与专业级虚拟现实/XR硬件和软件领域的全球领先者Varjo合作,展示一个突破性的混合现实艺术装置, 皇家国家盲人学会 (rnib),英国领先的视力丧失慈善机构。 这个名为"公共交通的私人生活"的装置是一个互动的声音和图像雕塑,旨在让有眼光…...

如何将html转化为pdf
html转换为pdf html2pdf.js库, 基于html2canvas和jspdf,只能打印2-3页pdf,比较慢,分页会截断html2canvas 只能打印2-3页pdf,比较慢,分页会截断 // canvasDom-to-image 不支持某些css属性Pdfmake html-to-p…...
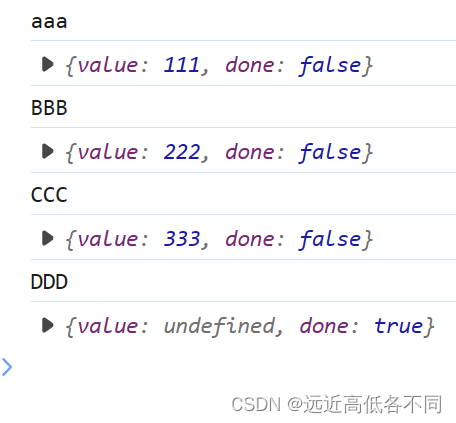
ES6初步了解生成器
生成器函数是ES6提供的一种异步编程解决方案,语法行为与传统函数完全不同 语法: function * fun(){ } function * gen(){console.log("hello generator");}let iterator gen()console.log(iterator)打印: 我们发现没有打印”hello…...
飞桨大模型套件:一站式体验,性能极致,生态兼容
在Wave Summit 2023深度学习开发者大会上,来自百度的资深研发工程师贺思俊和王冠中带来的分享主题是:飞桨大模型套件,一站式体验,性能极致,生态兼容。 大语言模型套件PaddleNLP 众所周知PaddleNLP并不是一个全新的模型…...

【C++入门到精通】哈希 (STL) _ unordered_map _ unordered_set [ C++入门 ]
阅读导航 前言一、unordered系列容器二、unordered_map1. unordered_map简介⭕函数特点 2. unordered_map接口- 构造函数- unordered_map的容量- unordered_map的迭代器- unordered_map的元素访问- unordered_map的修改操作- unordered_map的桶操作 三、unordered_set1. unorde…...
创建 Edge 浏览器扩展教程(上)
创建 Edge 浏览器扩展教程(上) 介绍开始之前后续步骤开始之前1:创建清单 .json 文件2 :添加图标3:打开默认弹出对话框 介绍 在如今日益数字化的时代,浏览器插件在提升用户体验、增加功能以及改善工作流程方…...

container_of解析及应用
container_of是一个C语言中比较少见,但实际经常用到的宏,在Linux kernel中也有大范围的应用。...

AI Agent的推理能力边界:大模型之外的关键技术突破
AI Agent的推理能力边界:大模型之外的关键技术突破 关键词:AI Agent、推理能力边界、工具增强推理、神经符号推理、自主规划、多Agent协同、幻觉抑制 摘要:本文针对当前行业普遍存在的「大模型参数堆得越高,AI Agent推理能力就越强」的认知误区,系统拆解了大模型原生推理能…...

别再为前后端AES加解密头疼了!手把手教你用CryptoJS和Java 8实现无缝对接
跨平台AES加解密实战:打通CryptoJS与Java的密钥对齐与编码陷阱 前后端分离架构下,数据安全传输始终是开发者的核心关切。当看到控制台抛出javax.crypto.BadPaddingException: Given final block not properly padded这类错误时,多数开发者都会…...

别再只当脚本小子了:用ArpSpoof搞懂ARP攻击的底层原理与实战防御
从ArpSpoof实战到协议原理:ARP攻击的深度解析与防御实践 在网络安全领域,ARP攻击是最基础却又最容易被忽视的攻击方式之一。许多初学者能够熟练使用Kali Linux中的ArpSpoof工具发起攻击,却对背后的协议机制知之甚少。这种"知其然而不知其…...

国网智能电表解决方案:从HPLC通信到远程费控的架构与实战
1. 项目概述:从一块电表到一套能源数据中枢如果你家里最近换了新电表,或者从事与园区、工厂能源管理相关的工作,大概率会接触到一种外观更简洁、带液晶屏、还能远程抄表的智能电表。这背后,就是国网电能表解决方案的落地体现。它早…...

超导量子处理器校准技术:频率分配与门优化
1. 超导量子处理器校准技术概述超导量子处理器校准是量子计算硬件实现中的关键环节,其核心目标是通过系统化的参数优化和误差抑制,确保量子比特能够可靠地执行高保真度的量子门操作。在Zuchongzhi 3.1处理器的研发过程中,我们成功集成了105个…...

[具身智能-791]:NAV2 全局规划层 A*算法的本质是距离最短,而不是时间最短算法
核心定论A 算法本质:优先求解几何物理距离最短路径,天生不是「通行耗时最短」算法*一、直白区分A 追求目标*以栅格空间长度为核心权重,算出纯路程最短的路线,只看走了多少米,不看好不好走、堵不堵、快慢如何。时间最短…...
)
TVA智能体范式的工业视觉革命(7)
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...
)
告别CodeBlocks!在VScode里用CMake+MinGW搞定LVGL模拟器(附SDL2配置避坑指南)
从CodeBlocks到VScode:打造LVGL模拟器的现代化开发体验 在嵌入式GUI开发领域,LVGL以其轻量级和丰富的功能组件赢得了众多开发者的青睐。然而,官方推荐的CodeBlocks开发环境却让不少习惯了现代IDE的开发者感到不适——界面陈旧、插件生态有限、…...

5G网络‘身份证’系统深度游:从CU/DU架构看NCI规划,以及它和4G ECGI到底有啥不同?
5G网络标识系统解构:从NCI位宽设计到CU/DU架构的范式变革 当我们在城市中穿梭时,手机屏幕上那个小小的"5G"图标背后,隐藏着一套精密的网络身份识别体系。这套系统不仅需要在上百万个基站间实现无歧义通信,还要为未来网络…...
)
告别卡顿!用GDAL+ObjectARX在AutoCAD里丝滑加载百GB遥感影像(附C++源码)
告别卡顿!用GDALObjectARX在AutoCAD里丝滑加载百GB遥感影像(附C源码) 在GIS和测绘工程领域,处理海量遥感影像数据是家常便饭。但当这些GB级甚至TB级的航拍图、卫星图需要导入AutoCAD进行规划设计时,传统的RasterImage对…...