μCOS-Ⅲ中断管理,这样理解非常简单!
μCOS-Ⅲ中断管理,这样理解非常简单!
文章目录
- μCOS-Ⅲ中断管理,这样理解非常简单!
- 前言
- 一、中断源与中断优先级
- 二、μCOS-Ⅲ的中断管理方式
- 三、中断屏蔽与中断控制
- 1、μCOS-Ⅲ中断开关
- 2、μCOS-Ⅲ中断屏蔽应用——临界区
- 4、μCOS-Ⅲ中断屏蔽应用之——任务调度锁
- 四、µC/OS-III 中断嵌套计数器
- 总结
前言
我们已经知道了STM32只使用了中断优先级配置寄存器的[7:4]位来配置中断优先级(共计16个中断优先级等级),并且知道其五个优先级分组的基本含义,(不知道的翻本专栏:μCOS-Ⅲ+GD32_SysTick与PendSV中断管理配置浅解),现在来聊一聊μCOS-Ⅲ的中断管理。
一、中断源与中断优先级
中断管理就必须先知道中断源与中断优先级,但经常有人弄不清楚这两个概念导致弄不清楚中断管理,我们把程序理解为正在写作业的你,中断源就是可以打断你写作业的事情,你妈妈叫你可以打断你写作业,着火也能打断你,隔壁猫叫都可以打断你,你要重新写作业(比作程序复位)或者拿错了作业(比作硬中断)也视为一种中断等…,我们把这些称为中断源。为了防止太乱,你必须做个规划那些事打断你你必须优先做,那些事打断你可以不优先做,所以你制定了一个规则,把事情分为重要事情和必须事情,这就是一个最简单优先级分组。然后你个每个事情做出编号,编号越小事情越优先,比如重新写作业优先级最高编号为,拿错了作业优先级其次,… …猫叫优先级为12,这就是中断优先级。记住:STM32拥有255个中断(编号为 1-15 的对应系统异常,大于等于 16 的则全是外部中断),有16个中断优先级。

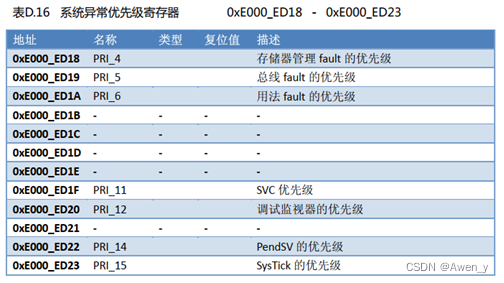
中断优先级有专门的优先级寄存器,前15个中断源(以下称系统异常)有独立的中断优先级配置寄存器,分别是:SHPR1、 SHPR2、 SHPR3
SHPR1寄存器:0xE000ED18
| 比特位 | 名称 | 功能 |
|---|---|---|
| [31:24] | PRI_7 | 保留 |
| [23:16] | PRI_6 | UsageFault 中断优先级 |
| [15:8] | PRI_5 | BusFault 中断优先级 |
| [7:0] | PRI_4 | MemManage 中断优先级 |
SHPR2寄存器:0xE000ED1C
| 比特位 | 名称 | 功能 |
|---|---|---|
| [31:24] | PRI_11 | SVCall 中断优先级 |
| [23:0] | — | 保留 |
SHPR3寄存器:0xE000ED20
| 比特位 | 名称 | 功能 |
|---|---|---|
| [31:24] | PRI_15 | SysTick 中断优先级 |
| [23:16] | PRI_14 | PendSV 中断优先级 |
| [15:0] | PRI_5 | 保留 |
µC/OS-III 在配置 PendSV 和 SysTick 中断优先级的时候,就使用到了 SHPR3 寄存器。
设置PendSV的优先级和SysTick的优先级
剩下的240个外部中断的中断优先级保存在中断优先级寄存器 NVIC_IPRx,用来配置外部中断的优先级,IPR 宽度为 8bit,原则上每个外部中断可配置的优先级为 0~255,数值越小,优先级越高。虽然IP是8位位宽,但CM3芯片精简设计,只有16个优先级,所以也只使用了其[7:4]高4bit 。
typedef struct
{__IOM uint32_t ISER[8U] /* 中断使能寄存器 */uint32_tRESERVED0[24U];__IOM uint32_t ICER[8U]; /* 中断除能寄存器 */uint32_tRSERVED1[24U];__IOM uint32_t ISPR[8U]; /* 中断使能挂起寄存器 */uint32_tRESERVED2[24U];__IOM uint32_t ICPR[8U]; /* 中断除能挂起寄存器 */uint32_tRESERVED3[24U];__IOM uint32_t IABR[8U]; /* 中断有效位寄存器 */uint32_tRESERVED4[56U];__IOM uint8_t IP[240U]; /* 中断优先级寄存器 */uint32_tRESERVED5[644U];__OM uint32_t STIR; /* 软件触发中断寄存器 */
} NVIC_Type;具体的设置方法会更具你的优先级分组来分,看是所有事情都重要或者所有事情都必须,或者一部分重要一部分必须。这就是为什么每个程序中只能存在一种优先级分组标准,否则会乱。
二、μCOS-Ⅲ的中断管理方式
你为了写作业快,你找了个AI机器人辅导你写作业,类似于加上μCOS-Ⅲ操作系统,这个系统就非常厉害,它不仅可以根据作业多少进行合理安排时间,高效辅导你写多门课程的作业,并且可以帮你准确判断是否有事情打断你写作业,当房子着火他会提醒你,妈妈叫你也会中断下来提醒你,猫叫也会提醒你,但是有几样它做不到:
1.你要重新写,它不会阻止你,它只会配合你重写(程序复位)
2.你拿错了作业,它判断不了你拿错了,只有你发现作业拿错了不能继续写了,它才会停下来。(硬件中断)
3.有特殊要求的中断,表示这些事不归他管。
如此类比,所以在μCOS-Ⅲ中断配置项中需要注意以下几点:
- 建议将所有优先级位指定为抢占优先级位,方便μC/OS-III管理HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4),为了保持事情分组正确好管理
- CPU_CFG_NVIC_PRIO_BITS,这个宏用于定义中断优先级配置寄存器的实际使用位数,对于STM32如果将宏定义为4,因为 STM32 的优16先级配置寄存器都只使用到了高四比特位;意思就是你准备定义16个优先级,
- 另外一个是宏CPU_CFG_KA_IPL_BOUNDARY用于定义受 µC/OS-III 管理的最高中断优先等级,中断优先级低于此宏定义值的中断受 µC/OS-III 管理。一般定义为4即中断优先级范围为4~15,意思就是AI机器人可以最高管理的优先级事情,比如重写作业或作业拿错了等特殊中断优先级太高不归他管,这个得你自己主观判断。
在中断服务函数中,如果调用μC/OS-III的API函数,那么该优先级必须在μC/OS-III所管理的范围内,这也就是SysTick的优先级为什么最高只能到4。
三、中断屏蔽与中断控制
在某些时候需要将一些中断进行屏蔽,就要使用到中断屏蔽寄存器。
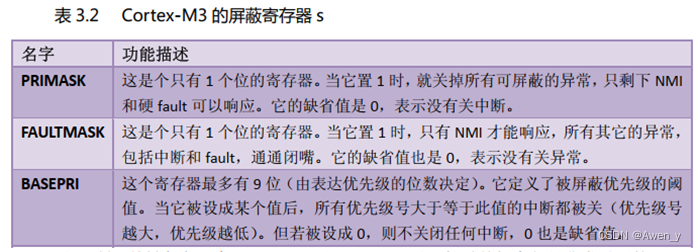
PRIMASK 寄存器:作用: PRIMASK 寄存器有 32bit,但只有 bit0 有效,是可读可写的,将 PRIMASK 寄存器设置为 1 用于屏蔽除 NMI 和 HardFault 外的所有异常和中断,将 PRIMASK 寄存器清 0 用于使能中断。
用法1
CPSIE I /* 清除 PRIMASK(使能中断) */CPSID I /* 设置 PRIMASK(屏蔽中断) */
用法2
MRS R0, PRIMASK /* 读取 PRIMASK 值 */
MOV R0, #0
MSR PRIMASK, R0 /* 清除 PRIMASK(使能中断) */
MOV R0, #1
MSR PRIMASK, R0 /* 设置 PRIMASK(屏蔽中断) */
用法3
__get_PRIMASK(); /* 读取 PRIMASK 值 */
__set_PRIMASK(0U); /* 清除 PRIMASK(使能中断) */
__set_PRIMASK(1U); /* 设置 PRIMASK(屏蔽中断) */
FAULTMASK 寄存器:作用: FAULTMASK 寄存器有 32bit,但只有 bit0 有效,也是可读可写的,将 FAULTMASK寄存器设置为 1 用于屏蔽除 NMI 外的所有异常和中断,将 FAULTMASK 寄存器清零用于使能中断。
用法1
CPSIE F /* 清除 FAULTMASK(使能中断) */CPSID F /* 设置 FAULTMASK(屏蔽中断) */
用法2
MRS R0, FAULTMASK /* 读取 FAULTMASK 值 */
MOV R0, #0
MSR FAULTMASK, R0 /* 清除 FAULTMASK(使能中断) */
MOV R0, #1
MSR FAULTMASK, R0 /* 设置 FAULTMASK(屏蔽中断) */
用法3
__get_FAULTMASK(); /* 读取 FAULTMASK 值 */
__set_FAULTMASK(0U); /* 清除 FAULTMASK(使能中断) */
__set_FAULTMASK(1U); /* 设置 FAULTMASK(屏蔽中断) */
BASEPRI 寄存器:作用: BASEPRI 有 32bit,但只有低 8 位[7:0]有效,也是可读可写的。 BASEPRI 寄存器比起 PRIMASK 和 FAULTMASK 寄存器直接屏蔽掉大部分中断的方式, BASEPRI 寄存器的功能显得更加细腻, BASEPRI 用于设置一个中断屏蔽的阈值,设置好 BASEPRI 后,中断优先级低于 BASEPRI 的中断就都会被屏蔽掉, µC/OS-III 就是使用 BASEPRI 寄存器来管理受 µC/OS-III管理的中断的,而不受 µC/OS-III 管理的中断,则不受 µC/OS-III 的影响。
用法1
MRS R0, BASEPRI /* 读取 BASEPRI 值 */
MOV R0, #0
MSR BASEPRI, R0 /* 清除 BASEMASK(使能中断) */
MOV R0, #0x60 /* 举例 */
MSR BASEPRI, R0 /* 设置 BASEMASK(屏蔽优先级低于 0x60 的中断) */
用法2
__get_BASEPRI(); /* 读取 BASEPRI 值 */
__set_BASEPRI(0); /* 清除 BASEPRI(使能中断) */
__set_BASEPRI(0x60); /* 设置 BASEPRI(屏蔽优先级小于 0x60 的中断) */
μC/OS-III主要用到BASEPRI和·PRIMASK,
中断管理主要利用BASEPRI这个寄存器,当需要关闭大部分中断则使用PRIMSASK这个寄存器
BASEPRI:屏蔽优先级低于某个阀值的中断,为0时则不关闭任何中断
比如:BASEPRI值为0x40(高四位有效)表示中断优先级在4~15内的均屏蔽,0-3的中断优先级正常执行,要关闭大部分中断则使用PRIMASK寄存器
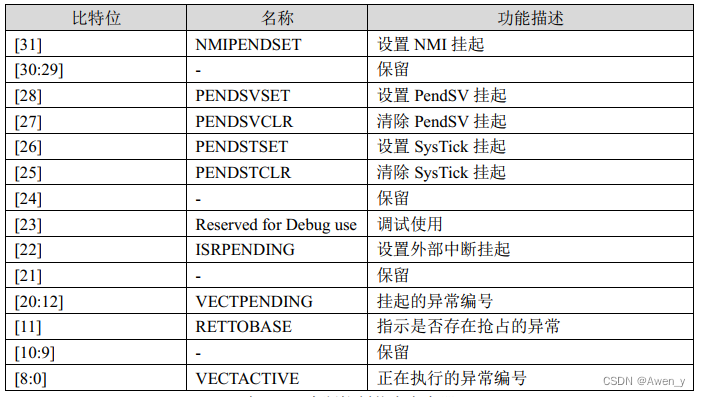
ICSR中断控制状态寄存器:0xE000ED04,作用:用于设置和清除异常的挂起状态,以及获取当前系统正在执行的异常编号,VECTACTIVE 段[8:0],读VECTACTIVE 段就能够判断当前执行的代码是否在中断中:
1、μCOS-Ⅲ中断开关
在文件 cpu_a.asm 中提供了两组同于开关中断的标号
1.OCPU_IntDis
OCPU_IntDisCPSID I ; 关闭中断BX LR ; 返回
2.CPU_IntEn
CPU_IntEnCPSIE I ; 打开中断BX LR ; 返回以上是第一组:关于 CPU_IntDis和CPU_IntEn这两个关于中断的操作标号都是直接操作了 PRIMASK 寄存器,直接屏蔽所有的中断和打开所用中断。
3.CPU_SR_Save
CPU_SR_SaveCPSID I ; 关闭中断PUSH {R1} ; 入栈 R1MRS R1, BASEPRI ; R1 = BASEPRIMSR BASEPRI, R0 ; BASEPRI = R0DSB ; 数据同步ISB ; 指令同步MOV R0, R1 ; R0 = R1POP {R1} ; 出栈 R1CPSIE I ; 打开中断BX LR ; 返回
4.CPU_SR_Restore
CPU_SR_RestoreCPSID I ; 关闭中断MSR BASEPRI, R0 ; BASEPRI = R0DSB ; 数据同步ISB ; 指令同步CPSIE I ; 打开中断BX LR ; 返回以上是第二组:
标号 CPU_SR_Save 的内容可简单分为如下三个步骤:
- 将 BASEPRI 寄存器的值读入到 R1 寄存器中,保存 BASEPRI 寄存器的原始值。
- 将 R0 寄存器的值写入 BASEPRI 寄存器, R0 寄存器中保存的值就是程序在调用标号CPU_SR_Save 时,传入的参数。
- 将 R1 寄存器中的值赋给 R0 寄存器,在程序中调用标号 CPU_SR_Save 时, CPU_SR_Save的返回值就保存在 R0 寄存器中。因此标号 CPU_SR_Save 所作的事情就是,根据入参设置 BASEPRI 寄存器,并返回在设置BASEPRI 寄存器前 BASEPRI 寄存器的值,以获取中断状态并关闭受 µC/OS-III 管理的中断。
而标号 CPU_SR_Restore的 就是用来给 BASEPRI 寄存器赋指定值的。 配个标号 CPU_SR_Save 使用就能够在需要进行中断保护(比如临界区) 的代码前后屏蔽并恢复受 µC/OS-III 管理的中断,以达到关键代码不受中断影响的目的。
μCOS-Ⅲ的中断屏蔽操作在以下两个地方使用比较多:
2、μCOS-Ⅲ中断屏蔽应用——临界区
什么是临界段:临界区,指必须完整运行,不能被中断或任务切换打断的代码中的一些关键部分。
使用场合:
1.需要严格按照时序初始化的外设:IIC、SPI等
2.系统自身需求
3.用户自己的代码需要不被打断、
API介绍
原理:在进入临界段代码时关闭中断,当处理完临界段代码以后再打开中断
1.CPU_CRITICAL_ENTER(); 进入临界段
#define CPU_CRITICAL_ENTER() \
do \
{ \CPU_INT_DIS(); \
} while (0)
#define CPU_INT_DIS() \
do \
{ \cpu_sr = CPU_SR_Save( CPU_CFG_KA_IPL_BOUNDARY << (8u - CPU_CFG_NVIC_PRIO_BITS)); \
} while (0)
CPU_CFG_KA_IPL_BOUNDARY << (8u – CPU_CFG_NVIC_PRIO_BITS),这个的结果就是屏蔽受 µC/OS-III 管理的中断优先级的中断,而不受 µC/OS-III 管理的中断,是不受影响的。
2.CPU_CRITICAL_EXIT(); 退出临界段
#define CPU_CRITICAL_EXIT() \
do \
{ \CPU_INT_EN(); \
} while (0)
#define CPU_INT_EN() \
do \
{ \CPU_SR_Restore(cpu_sr); \
} while (0)
将 BASEPRI 恢复到进入临界区之 前 的 状 态 ,函 数 CPU_CRITICAL_ENTER() 和 函 数CPU_CRITICAL_EXIT()配合使用的
代码演示:
{uint32_t a;uint32_t b;CPU_SR_ALLOC(); /* 必须定义在所有局部变量之后 *//* 非临界区代码 */CPU_CRITICAL_ENTER(); /* 进入临界区 *//* 临界区代码 */CPU_CRITICAL_EXIT(); /* 退出临界区 *//* 非临界区代码 */
}
特点:
1.成对使用,但不可以嵌套使用(注意和挂起任务、恢复任务特点进行对比)
2.尽量保持临界区耗时段较小
4、μCOS-Ⅲ中断屏蔽应用之——任务调度锁
什么是任务调度锁:用于任务调度器上锁和解锁,当任务调度器上锁则禁止任务调度,解锁则允许任务调度,其内部也是调用的的CPU_CRITICAL_ENTER();和 CPU_CRITICAL_EXIT();两个函数
使用OSSchedLock()进行上锁
使用OSSchedUnlock()进行解锁
特点:
1.成对使用,可嵌套,上锁次数和解锁次数必须一样(和挂起任务、恢复任务特点一致),进入和退出时都会有更新上锁层数
2.仅关闭调度器,不影响中断执行,只是不会执行任务切换,仅仅防止任务之间的资源争夺,中断照样执行
3.适用于临界区于任务与任务之间;既不用去延时中断,又做到临界区的安全
OS_ERR err;
/*非临界区*/
OSSchedLock(&err) //上锁
{}
OSSchedUnlock(&err); //解锁四、µC/OS-III 中断嵌套计数器
在 µC/OS-III 中,会通过全局变量 OSIntNestingCtr 记录中断嵌套的次数,方便 µC/OS-III 判断当前是否处于中断状态。当全局变量 OSIntNestingCtr 大于 0 的时候,就表示当前处于中断状态,当全局变量 OSIntNestingCtr 等于 0 的时候,就表示当前不是处于中断状态。
全局变量 OSIntNestingCtr 是在中断服务函数中更新的, 因此, µC/OS-III 提供了两个分别用于中断服务函数前后的函数,分别为 OSIntEnter()和函数 OSIntExit()。其中函数 OSIntEnter()只是简单地更新了全局变量 OSIntNestingCtr 的值, 而函数 OSIntExit()除了更新全局变量OSIntNestingCtr 的值,同时还会根据需要进行任务切换。下面以 µC/OS-III 提供了 SysTick 的中断服务函数为例,展示函数OSIntEnter()和函数OSIntExit()的使用:
void OS_CPU_SysTickHandler(void)
{CPU_SR_ALLOC();CPU_CRITICAL_ENTER();/* 进入中断后,先调用函数 OSIntEnter() */OSIntEnter();CPU_CRITICAL_EXIT();/* 中断服务函数的内容 */OSTimeTick();/* 中断返回前,调用函数 OSIntExit() */OSIntExit();
}总结
关于µC/OS-III 的中断管理就到这里,,整个OS的中断还是立足于M3内核之上的,如果对内核中断比较熟悉,那么理解OS中断管理就几乎是水到渠成的事。其中对SysTick与PendSV中断管理的部分是单独拿出来的,因为这两个中断可以说是作为µC/OS-III 最基础最核心内容之一,说它们是µC/OS-III 的命门所在也不为过。
有兴趣的可以参考:https://blog.csdn.net/Yin_w/article/details/132184044?spm=1001.2014.3001.5502本篇博客。
相关文章:
μCOS-Ⅲ中断管理,这样理解非常简单!
μCOS-Ⅲ中断管理,这样理解非常简单! 文章目录 μCOS-Ⅲ中断管理,这样理解非常简单!前言一、中断源与中断优先级二、μCOS-Ⅲ的中断管理方式三、中断屏蔽与中断控制1、μCOS-Ⅲ中断开关2、μCOS-Ⅲ中断屏蔽应用——临界区4、μCOS…...
Vue 项目进行 SEO 优化
SSR 服务器渲染 服务端渲染, 在服务端 html 页面节点, 已经解析创建完了, 浏览器直接拿到的是解析完成的页面解构 关于服务器渲染:Vue 官网介绍 ,对 Vue 版本有要求,对服务器也有一定要求,需要支持 nodejs 环境。 优势: 更好的 …...

【C++入门篇】保姆级教程篇【上】
目录 一、第一个C程序 二、C命名空间 1)什么是命名空间? 2)命名空间的使用 3) std库与namespace展开 4)命名空间的嵌套使用 三、输入输出方式 四、缺省参数 1)什么是缺省参数? 2࿰…...
用傲梅分区软件分割分区重启系统蓝屏BAD_SYSTEM_CONFIG_INFO,八个解决参考方案
环境: Win11 专业版 HP 笔记本 傲梅分区软件 闪迪16G U盘 Win10 官方镜像文件 Win11PE 系统安装U盘 USB固态硬盘盒 问题描述: 起因 开始使用windows自动磁盘管理工具压缩不了磁盘,提示无法将卷压缩到超出任何不可移动的文件所在点,关闭系统保护还原,删除系统创建…...

7-1、S曲线加减速原理【51单片机控制步进电机-TB6600系列】
摘要:本节介绍步进电机S曲线相关内容,总共分四个小节讨论步进电机S曲线相关内容 根据上节内容,步进电机每一段的速度可以任意设置,但是每一段的速度都会跳变,当这个跳变值比较大的时候,电机会发生明显的…...

golang 通過ssh連接遠程服務器 控制
1.下載依賴 go get golang.org/x/crypto/ssh 2.import import ("fmt""log""time""golang.org/x/crypto/ssh" )3.使用 func pwdConnect(sshHost, sshUser, sshPassword string, sshPort int) (*ssh.Client, error) {// 创建ssh登录…...
Python深度学习实战-基于tensorflow.keras六步法搭建神经网络(附源码和实现效果)
实现功能 第一步:import tensorflow as tf:导入模块 第二步:制定输入网络的训练集和测试集 第三步:tf.keras.models.Sequential():搭建网络结构 第四步:model.compile():配置训练方法 第五…...

单片机核心/RTOS必备 (ARM汇编)
ARM汇编概述 一开始,ARM公司发布两类指令集: ARM指令集,这是32位的,每条指令占据32位,高效,但是太占空间。Thumb指令集,这是16位的,每条指令占据16位,节省空间。 要节…...

2023/10/25
如果你越来越冷漠 你以为你成长了 但其实没有 长大应该是变得温柔 对全世界都温柔...
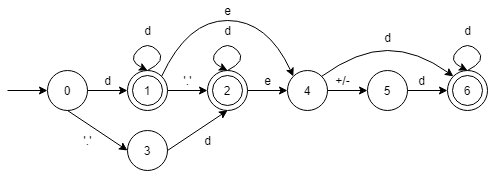
如何做一个无符号数识别程序
1.状态分析 我们可以把无符号数分为:整数,带小数,带指数部分三种形式。以此构建一个DFA。首先需识别输入是整数还是小数点,若是整数部分输入然后还要再循环识别一次是否有小数点,最后识别是否有指数部分,指…...
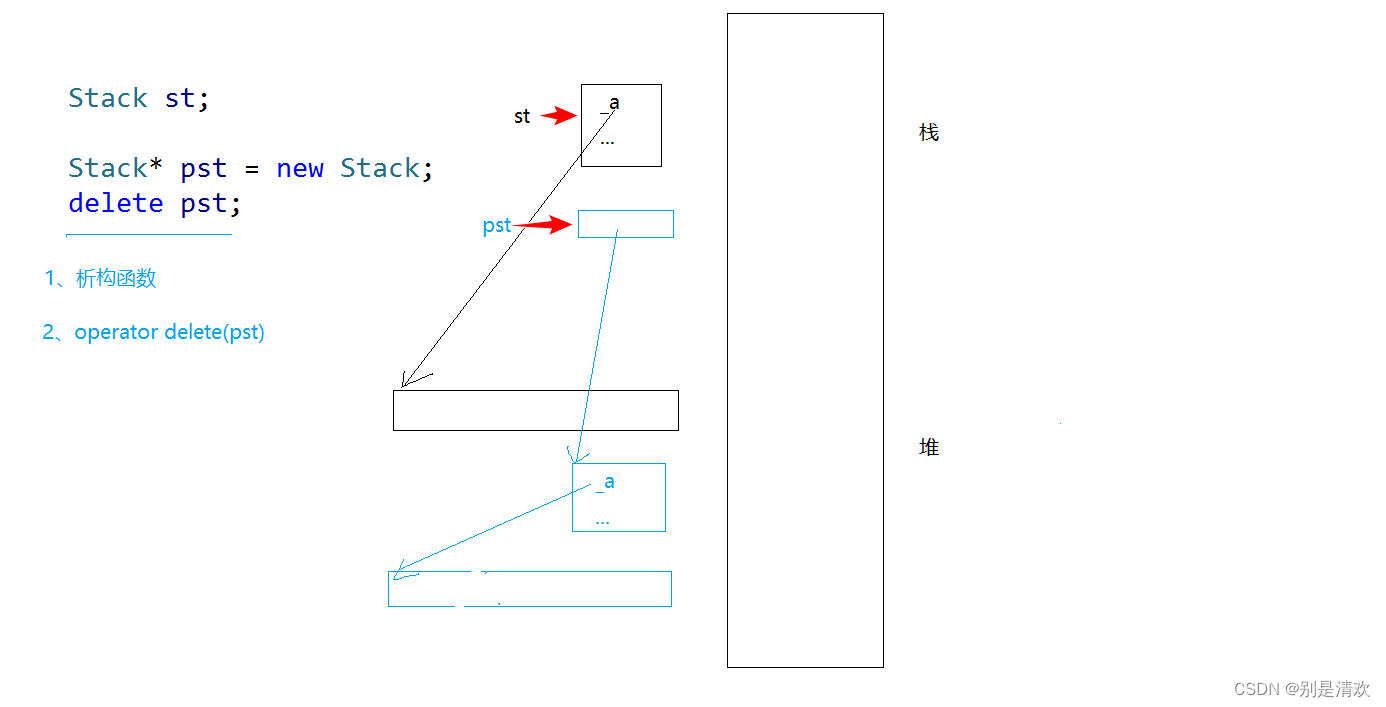
C++初阶:C/C++内存管理
一.C/C内存分布 先来回顾一下C语言内存分区示意图如下: 代码区: 程序执行代码一般存放在代码区,字符串常量以及define定义的常量也可能存放在代码区。 常量区: 字符串,数字等常量以及const修饰的全局变量往往存放在…...
新成果展示:AlGaN/GaN基紫外光电晶体管的设计与制备
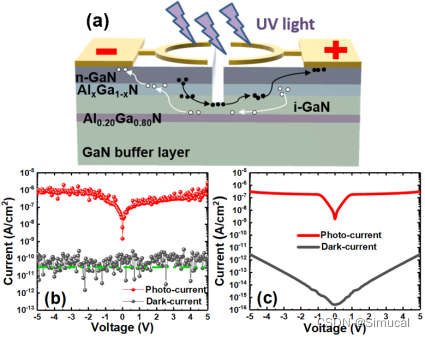
紫外光电探测器被广泛应用于导弹预警、火灾探测、非可见光通信、环境监测等民事和军事领域,这些应用场景的实现需要器件具有高信噪比和高灵敏度。因此,光电探测器需要具备响应度高、响应速度快和暗电流低的特性。近期,天津赛米卡尔科技有限公…...

Ivs+keepalived:高可用集群
Ivskeepalived:高可用集群 keepalived为lvs应运而生的高可用服务。lvs的调度器无法做高可用,keepalived这个软件就是为了实现调度器的高可用。 注意:keepalived不是专门为lvs集群服务的,也可以做其他代理服务器的高可用。 lvs的高可用集群&a…...
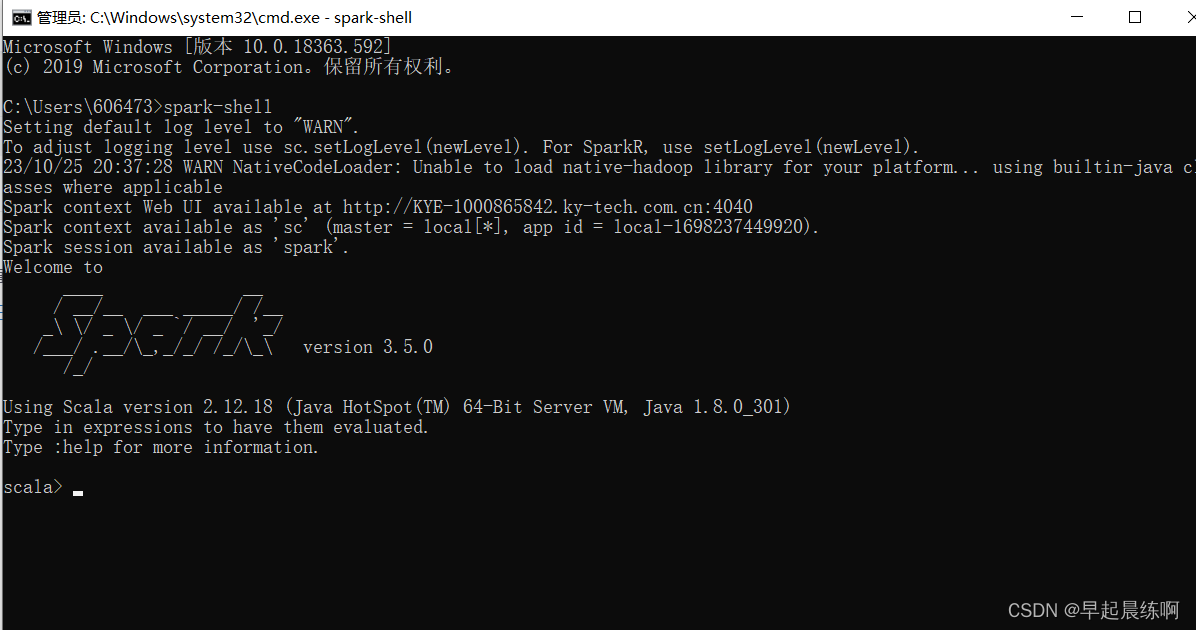
win10安装spark
一、进入spark下载页面 连接 Downloads | Apache Spark 二、解压下载后的.tgz文件 直接解压即可 三、运行 运行bin目录下的 spark-shell.cmd 提示 Did not find winutils.exe: java.io.FileNotFoundException: java.io.FileNotFoundException: HADOOP_HOME and hadoop.hom…...
)
基于Spring Boot 的毕业生实习就业管理系统(绿色)
文章目录 项目介绍主要功能截图:部分代码展示设计总结项目获取方式🍅 作者主页:超级无敌暴龙战士塔塔开 🍅 简介:Java领域优质创作者🏆、 简历模板、学习资料、面试题库【关注我,都给你】 🍅文末获取源码联系🍅 项目介绍 基于Spring Boot 的毕业生实习就业管理系…...
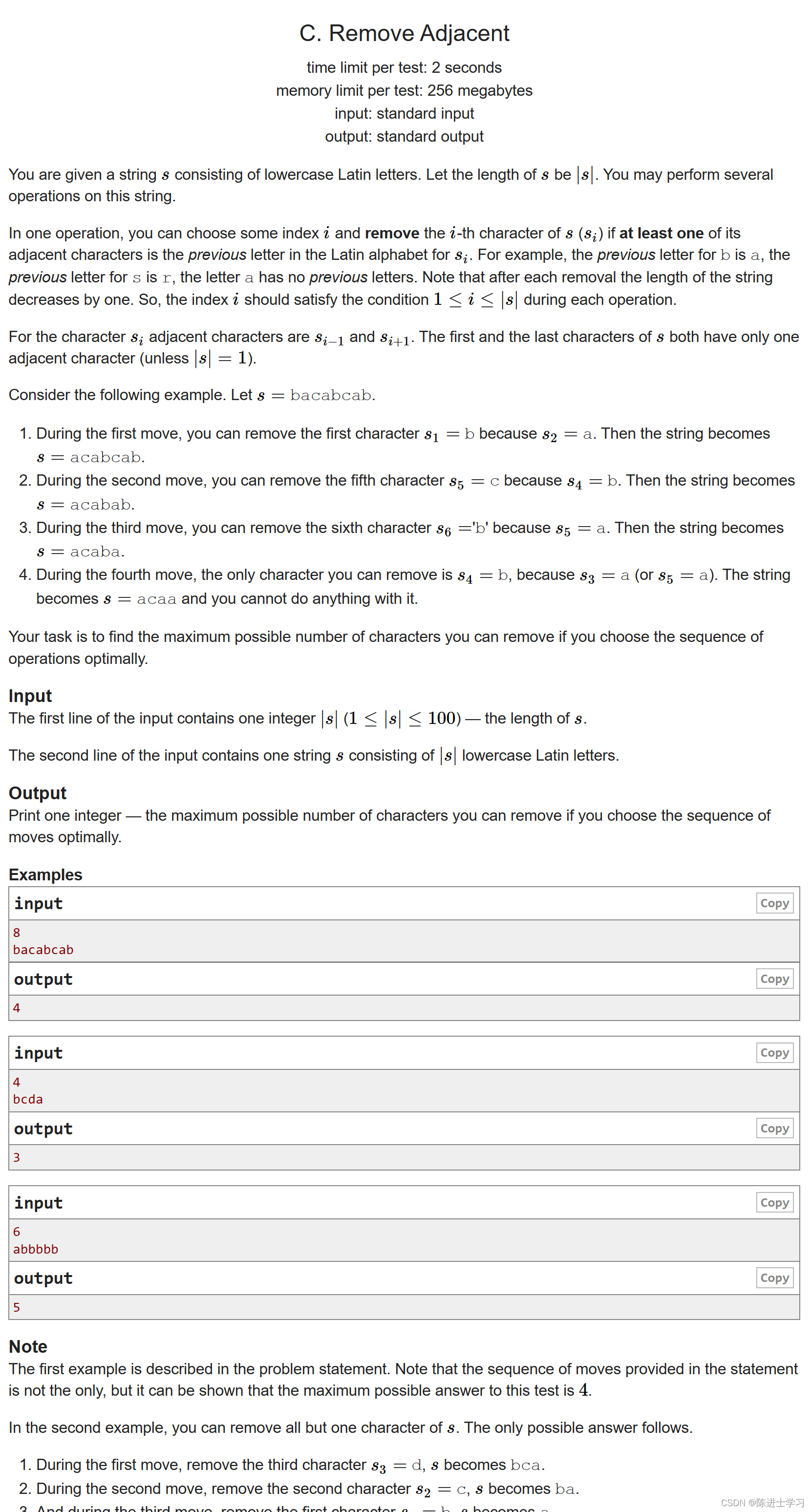
1600*C. Remove Adjacent(贪心字符串)
Problem - 1321C - Codeforces 解析: 贪心,从z到a遍历,每次循环减去符合题意的字符。 #include<bits/stdc.h> using namespace std; signed main(){int n;string s;cin>>n>>s;for(char iz;i>a;i--){for(int j0;j<s.…...
)
CRC校验码2018-架构师(六十一)
以下关于串行总线的说法中,正确的是()。 串行总线一般都是双全工总线,适宜于长距离传输数据串行总线传输的波特率是总线初始化时预先定义好的,使用中不可改变串行总线是按位(BIT)传输数据的&am…...

CSS设置超出范围滚动条和滚动条样式
CSS设置超出范围滚动条和滚动条样式 效果展示 当块级内容区域超出块级元素范围的时候,就会以滚动条的形式展示,你可以滚动里面的内容,里面的内容不会超出块级区域范围。 未设置超出隐藏,显示滚动条 超出隐藏,显示滚动…...

EtherCAT从站转CclinkIE协议网关应用案例
远创智控的YC-ECT-CCLKIE网关,一款具有强大功能的ETHERCAT通讯网关。 它可以将ETHERCAT网络和CCLINK IE FIELD BASIC网络无缝连接起来。作为ETHERCAT总线中的从站,本网关可以接收来自ETHERCAT主站的数据,并将其传输到CCLINK IE FIELD BASIC网…...

腾讯云 AI 绘画:文生图、图生图、图审图 快速入门
腾讯云 AI 绘画是腾讯云推出的一款基于人工智能的图像生成和编辑产品,能够根据输入的图片或描述文本,智能生成与输入内容相关的图片,支持多样化的图片风格选择。 在本文中,我们将介绍如何使用腾讯云 AI 绘画的三项主要功能&#…...

终极D2DX宽屏补丁:让经典暗黑破坏神2在现代PC上完美重生
终极D2DX宽屏补丁:让经典暗黑破坏神2在现代PC上完美重生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 你是否还…...

proxy-doctor:自动化诊断与修复开发工具代理配置的利器
1. 项目概述与核心价值最近在折腾一些需要稳定网络连接的项目时,遇到了一个老生常谈但又极其恼人的问题:代理配置。无论是开发环境里的包管理工具,还是日常使用的命令行工具,一旦涉及到网络请求,代理设置不对ÿ…...

从纹波和EMI出发:实战分析DC-DC降压电路中PWM与PFM的取舍与优化技巧
从纹波和EMI出发:实战分析DC-DC降压电路中PWM与PFM的取舍与优化技巧 在射频模块或高精度ADC供电设计中,电源的纯净度直接决定系统性能上限。当输出电压纹波超出ADC的LSB范围,或EMI噪声耦合到敏感信号链时,工程师往往需要重新审视D…...

从零构建个人知识库:Go+React全栈项目RocketNotes实战解析
1. 项目概述:从零到一构建个人知识管理工具最近在整理个人笔记和代码片段时,发现了一个挺有意思的开源项目fynnfluegge/rocketnotes。乍一看这个名字,可能会联想到火箭(Rocket)和笔记(Notes)的结…...

如何快速掌握openpilot:从零到精通的自动驾驶系统终极指南
如何快速掌握openpilot:从零到精通的自动驾驶系统终极指南 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Tre…...

【CH32V307实战】4P OLED屏I2C驱动移植与快速显示指南
1. CH32V307与4P OLED屏的硬件连接指南 第一次拿到CH32V307开发板和4P OLED屏时,最让我头疼的就是接线问题。这种4线制OLED(通常标注为4P或4PIN)相比传统的7线制简化了不少,但引脚定义各家厂商可能略有差异。经过多次实测…...

地下态势智能研判,拔高硐室深部安全透明管控等级技术白皮书
地下态势智能研判,拔高硐室深部安全透明管控等级技术白皮书 副标题:全要素三维动态重建井下场景,融合井下无感坐标解算、跨断面跨镜轨迹串联、身体指纹人员轨迹存档,井下风险前置感知、动态全程透明追溯 前言 矿山井下深部硐室与纵…...

基于大语言模型的本地语义搜索工具LLocalSearch部署与应用指南
1. 项目概述:一个能“读懂”你电脑的本地搜索工具 如果你和我一样,电脑里塞满了各种文档、邮件、聊天记录和代码片段,那么“找东西”这件事,绝对能排进日常最耗时的任务前三。传统的文件搜索,比如Windows自带的搜索或者…...

芯片老化座的工作温度范围?
在芯片测试领域,老化座(Burn-in Socket)是保障半导体器件长期可靠性的关键设备。它不仅要在极端温度下稳定工作,还要确保测试数据的精准度。今天,我们以HMILU(深圳市鸿怡电子有限公司)为例&…...

基于Docker部署OpenOffice无头服务实现文档自动化处理
1. 项目概述与核心价值最近在折腾文档处理自动化流程,发现很多老项目或者特定场景下,对Office文档的兼容性要求极高,尤其是那些需要处理.doc、.xls、.ppt等老格式的场景。直接用现代办公套件(比如LibreOffice)去处理&a…...