Python实现双目标定、畸变矫正、立体矫正
一,双目标定、畸变矫正、立体矫正的作用
-
双目目标定:
- 3D重建和测距:通过双目目标定,您可以确定两个摄像头之间的相对位置和朝向,从而能够根据视差信息计算物体的深度,进行三维重建和测距。
- 姿态估计:双目摄像头可以用于估计物体或相机的姿态,这对于虚拟现实、增强现实和机器人导航等应用非常重要。
-
畸变矫正:
- 图像质量提高:镜头畸变会引入图像失真,畸变矫正可以改善图像质量,使物体的形状更准确。
- 特征匹配:在图像特征匹配中,畸变矫正可以提高匹配的精度,有助于在不同视图之间正确匹配特征点。
-
立体矫正:
- 立体视觉:立体矫正是用于双目或多目视觉系统的关键步骤,可使两个摄像头的像素对应点在同一水平线上,从而简化了立体视觉中的视差计算。
- 深度感知:立体矫正后,您可以使用视差图来估计物体的深度,这对于实现深度感知和3D重建非常重要。
二,双目拍照代码
#coding:utf-8
import cv2
import time
import timeleft_camera = cv2.VideoCapture(0)
left_camera.set(cv2.CAP_PROP_FRAME_WIDTH,640)
left_camera.set(cv2.CAP_PROP_FRAME_HEIGHT,480)right_camera = cv2.VideoCapture(1)
right_camera.set(cv2.CAP_PROP_FRAME_WIDTH,640)
right_camera.set(cv2.CAP_PROP_FRAME_HEIGHT,480)path="/home/song/pic/" #图片存储路径AUTO =False # True自动拍照,False则手动按s键拍照
INTERVAL = 0.0000005 # 调整自动拍照间隔cv2.namedWindow("left")
cv2.namedWindow("right")
cv2.moveWindow("left", 0, 0)counter = 0
utc = time.time()
folder = "/home/song/pic/" # 照片存储路径def shot(pos, frame):global countertimestr = datetime.datetime.now()path = folder + pos + "_" + str(counter) +".jpg"cv2.imwrite(path, frame)print("snapshot saved into: " + path)while True:ret, left_frame = left_camera.read()ret, right_frame = right_camera.read()cv2.imshow("left", left_frame)cv2.imshow("right", right_frame)now = time.time()if AUTO and now - utc >= INTERVAL:shot("left", left_frame)shot("right", right_frame)counter += 1utc = nowkey = cv2.waitKey(1)if key == ord("q"):breakelif key == ord("s"):shot("left", left_frame)shot("right", right_frame)counter += 1left_camera.release()
right_camera.release()
cv2.destroyWindow("left")
cv2.destroyWindow("right")
三,分别对左右目进行标定
在进行双目相机的标定之前,需要先对左右目的单目摄像头进行单目标定。这是因为双目摄像头的标定需要知道每个摄像头的内部参数(如相机矩阵、畸变系数)以及相机之间的外部参数(相对位置和朝向)。这些参数是通过单目标定来获得的。
单目标定通常包括以下步骤:
-
相机内参标定:通过拍摄一个包含已知尺寸的标定板的图像,然后使用相机标定算法来估计相机内参,如焦距、主点坐标和畸变系数。
-
相机外参标定:通过将相机放置在不同位置或拍摄不同方向的图像,使用外参标定算法来估计相机的位置和朝向。这一步通常需要多幅图像,以确定相机在三维空间中的位置和姿态。
-
畸变矫正:使用内参标定得到的畸变系数来矫正图像,以去除镜头畸变。
-
生成标定文件:将内外参和畸变系数保存在标定文件中,以便后续的双目标定使用。
一旦单目摄像头的内部参数、外部参数和畸变系数都已知,就可以进行双目标定,以确定双目摄像头之间的相对位置和朝向,以及立体视觉中的标定参数。
#-*- coding:utf-8 -*-
import numpy as np
import cv2
import glob# 设置迭代终止条件
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)# 设置 object points, 形式为 (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((6*7,3), np.float32) #我用的是6×7的棋盘格,可根据自己棋盘格自行修改相关参数
objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)# 用arrays存储所有图片的object points 和 image points
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.#用glob匹配文件夹/home/song/pic_1/right/下所有文件名含有“.jpg"的图片
images = glob.glob(r"/home/song/pic/right/*.jpg")for fname in images:img = cv2.imread(fname)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 查找棋盘格角点ret, corners = cv2.findChessboardCorners(gray, (7,6), None)# 如果找到了就添加 object points, image pointsif ret == True:objpoints.append(objp)corners2=cv2.cornerSubPix(gray,corners, (11,11), (-1,-1), criteria)imgpoints.append(corners)# 对角点连接画线加以展示cv2.drawChessboardCorners(img, (7,6), corners2, ret)cv2.imshow('img', img)cv2.waitKey(500)
cv2.destroyAllWindows()# 标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
print(mtx, dist)#对所有图片进行去畸变,有两种方法实现分别为: undistort()和remap()
images = glob.glob(r"/home/song/pic/right/*.jpg")
for fname in images:prefix=fname.split('/')[5]img = cv2.imread(fname)h, w = img.shape[:2]newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx, dist, (w,h), 1, (w,h))# # 使用 cv.undistort()进行畸变校正# dst = cv2.undistort(img, mtx, dist, None, newcameramtx)# # 对图片有效区域进行剪裁# # x, y, w, h = roi# # dst = dst[y:y+h, x:x+w]# cv2.imwrite('/home/song/pic_1/undistort/'+prefix, dst)# 使用 remap() 函数进行校正mapx, mapy = cv2.initUndistortRectifyMap(mtx, dist, None, newcameramtx, (w, h), 5)dst = cv2.remap(img, mapx, mapy, cv2.INTER_LINEAR)# 对图片有效区域进行剪裁x, y, w, h = roidst = dst[y:y + h, x:x + w]cv2.imwrite('/home/song/pic/undistort/'+prefix, dst)#重投影误差计算
mean_error = 0
for i in range(len(objpoints)):imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2)mean_error += errorprint("total error: ", mean_error/len(objpoints))
四,双目标定及其立体校正
#coding:utf-8
import numpy as np
import cv2
import matplotlib.pyplot as plt
from PIL import Image# 设置迭代终止条件
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
criteria_stereo = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)# 设置 object points, 形式为 (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((6 * 7, 3), np.float32) #我用的是6×7的棋盘格,可根据自己棋盘格自行修改相关参数
objp[:, :2] = np.mgrid[0:7, 0:6].T.reshape(-1, 2)# 用arrays存储所有图片的object points 和 image points
objpoints = [] # 3d points in real world space
imgpointsR = [] # 2d points in image plane
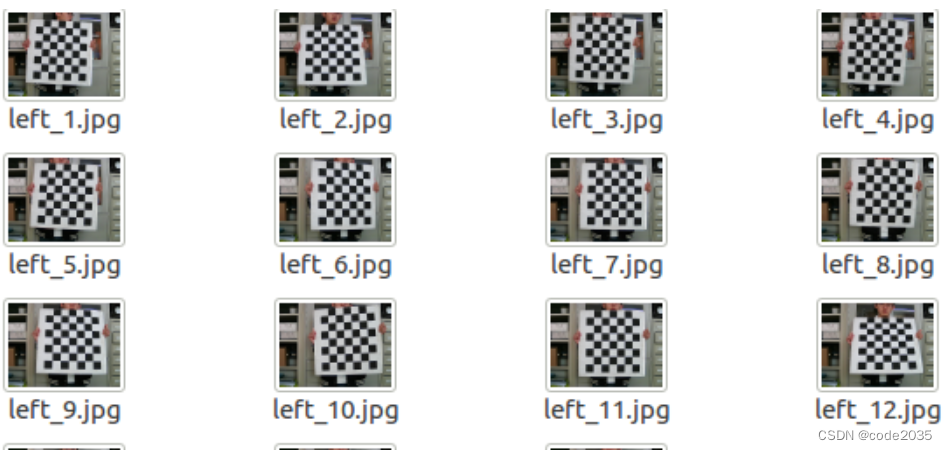
imgpointsL = []# 本次实验采集里共计30组待标定图片依次读入进行以下操作
for i in range(0,30): t = str(i)ChessImaR = cv2.imread('/home/song/pic/right_' + t + '.jpg', 0) # 右视图ChessImaL = cv2.imread('/home/song/pic/left_' + t + '.jpg', 0) # 左视图retR, cornersR = cv2.findChessboardCorners(ChessImaR,(7, 6), None) # 提取右图每一张图片的角点retL, cornersL = cv2.findChessboardCorners(ChessImaL,(7, 6), None) # # 提取左图每一张图片的角点if (True == retR) & (True == retL):objpoints.append(objp)cv2.cornerSubPix(ChessImaR, cornersR, (11, 11), (-1, -1), criteria) # 亚像素精确化,对粗提取的角点进行精确化cv2.cornerSubPix(ChessImaL, cornersL, (11, 11), (-1, -1), criteria) # 亚像素精确化,对粗提取的角点进行精确化imgpointsR.append(cornersR)imgpointsL.append(cornersL)# 相机的单双目标定、及校正
# 右侧相机单独标定
retR, mtxR, distR, rvecsR, tvecsR = cv2.calibrateCamera(objpoints,imgpointsR,ChessImaR.shape[::-1], None, None)# 获取新的相机矩阵后续传递给initUndistortRectifyMap,以用remap生成映射关系
hR, wR = ChessImaR.shape[:2]
OmtxR, roiR = cv2.getOptimalNewCameraMatrix(mtxR, distR,(wR, hR), 1, (wR, hR))# 左侧相机单独标定
retL, mtxL, distL, rvecsL, tvecsL = cv2.calibrateCamera(objpoints,imgpointsL,ChessImaL.shape[::-1], None, None)# 获取新的相机矩阵后续传递给initUndistortRectifyMap,以用remap生成映射关系
hL, wL = ChessImaL.shape[:2]
OmtxL, roiL = cv2.getOptimalNewCameraMatrix(mtxL, distL, (wL, hL), 1, (wL, hL))# 双目相机的标定
# 设置标志位为cv2.CALIB_FIX_INTRINSIC,这样就会固定输入的cameraMatrix和distCoeffs不变,只求解𝑅,𝑇,𝐸,𝐹
flags = 0
flags |= cv2.CALIB_FIX_INTRINSICretS, MLS, dLS, MRS, dRS, R, T, E, F = cv2.stereoCalibrate(objpoints,imgpointsL,imgpointsR,OmtxL,distL,OmtxR,distR,ChessImaR.shape[::-1], criteria_stereo,flags)# 利用stereoRectify()计算立体校正的映射矩阵
rectify_scale= 1 # 设置为0的话,对图片进行剪裁,设置为1则保留所有原图像像素
RL, RR, PL, PR, Q, roiL, roiR= cv2.stereoRectify(MLS, dLS, MRS, dRS,ChessImaR.shape[::-1], R, T,rectify_scale,(0,0))
# 利用initUndistortRectifyMap函数计算畸变矫正和立体校正的映射变换,实现极线对齐。
Left_Stereo_Map= cv2.initUndistortRectifyMap(MLS, dLS, RL, PL,ChessImaR.shape[::-1], cv2.CV_16SC2) Right_Stereo_Map= cv2.initUndistortRectifyMap(MRS, dRS, RR, PR,ChessImaR.shape[::-1], cv2.CV_16SC2)#立体校正效果显示
for i in range(0,1): # 以第一对图片为例t = str(i)frameR = cv2.imread('/home/song/pic/right_' + t + '.jpg', 0) frameL = cv2.imread('/home/song/pic/left_' + t + '.jpg', 0) Left_rectified= cv2.remap(frameL,Left_Stereo_Map[0],Left_Stereo_Map[1], cv2.INTER_LANCZOS4, cv2.BORDER_CONSTANT, 0) # 使用remap函数完成映射im_L=Image.fromarray(Left_rectified) # numpy 转 image类Right_rectified= cv2.remap(frameR,Right_Stereo_Map[0],Right_Stereo_Map[1], cv2.INTER_LANCZOS4, cv2.BORDER_CONSTANT, 0)im_R=Image.fromarray(Right_rectified) # numpy 转 image 类#创建一个能同时并排放下两张图片的区域,后把两张图片依次粘贴进去width = im_L.size[0]*2height = im_L.size[1]img_compare = Image.new('RGBA',(width, height))img_compare.paste(im_L,box=(0,0))img_compare.paste(im_R,box=(640,0))#在已经极线对齐的图片上均匀画线for i in range(1,20):len=480/20plt.axhline(y=i*len, color='r', linestyle='-')plt.imshow(img_compare)plt.show()
五,双目的具体应用
双目视觉是指通过两个摄像头(或相机)捕获的图像来模拟人类双眼视觉系统。它可以提供更多的深度信息和立体感,因此在许多领域都有具体的应用。
以下是一些双目视觉的具体应用:
-
三维重建:通过双目摄像头捕获的图像,可以使用立体视觉算法来重建场景的三维结构。这对于计算机辅助设计、虚拟现实、增强现实等领域非常有用。
-
物体检测与跟踪:双目视觉可以提供更多的深度信息,从而使得物体检测和跟踪更加准确和稳定。例如,在自动驾驶中,双目视觉可以用于检测和跟踪其他车辆、行人等。
-
深度感知:通过双目视觉可以获取场景中物体的深度信息,从而可以进行深度感知和距离测量。这在机器人导航、室内定位、无人机避障等领域非常有用。
-
姿态估计:双目视觉可以用于估计物体或人体的姿态和运动。例如,在人机交互中,双目视觉可以用于手势识别和追踪。
-
立体匹配:通过双目视觉可以进行立体匹配,即将两个图像中对应的像素点进行匹配。这在计算机视觉中是一个重要的问题,可以用于图像配准、目标识别等。
-
视觉SLAM:双目视觉可以与同步定位与地图构建(SLAM)算法结合使用,实现同时定位和地图构建。这在无人车、无人机等领域中非常重要。
相关文章:
Python实现双目标定、畸变矫正、立体矫正
一,双目标定、畸变矫正、立体矫正的作用 双目目标定: 3D重建和测距:通过双目目标定,您可以确定两个摄像头之间的相对位置和朝向,从而能够根据视差信息计算物体的深度,进行三维重建和测距。姿态估计…...
showdoc 文件上传 (cnvd-2020-26585)
showdoc 文件上传 (cnvd-2020-26585) 描述 ShowDoc是一个非常适合IT团队的在线API文档、技术文档工具。通过showdoc,你可以方便地使用markdown语法来书写出美观的API文档、数据字典文档、技术文档、在线excel文档等等。 api_page存在任意文…...

Java数据类型,变量与运算符
1.字面常量 常量是在程序运行期间,固定不变的量称为常量。 public class HelloWorld{public static void main(String[] args){System.out.println("Hello,world");} } 在以上程序中,输出的Hello Word,其中的“Hello Word”就是…...

Linux nm命令
Linux的nm命令主要用于列出对象文件中的符号。以下是一些使用示例: 基本用法:只需运行’nm’命令,并将对象文件的名称作为输入传递给它。例如,我使用’nm’命令与’apl’elf 文件:nm apl。 在输出中为每个符号前面添加…...

iOS发布证书.p12文件无密码解决办法及导出带密码的新.p12文件方法
摘要: 本文将以iOS技术博主身份,分享解决使用无密码的.p12文件发布应用时遇到的问题,并介绍如何以带密码的方式重新导出.p12文件的方法。通过本文提供的步骤,开发者可以顺利完成证书的发布流程。 引言 在iOS应用发布过程中&…...

OpenCamera拍照的代码流程
按理来说,拍照应该是很简单的。随着功能的复杂,代码也是越来越多,流程越来越长。想看看地理位置是怎么保存的,于是就研究了一下OpenCamera的拍照流程。在回调时有点乱。 MainActivity clickedTakePhoto() takePicture() takePic…...
华为OD机考算法题:矩阵最大值
题目部分 题目矩阵最大值难度难题目说明给定一个仅包含 0 和 1 的 N*N 二维矩阵,请计算二维矩阵的最大值,计算规则如下: 1. 每行元素按下标顺序组成一个二进制数(下标越大越排在低位),二进制数的值就是该行…...
【Javascript】函数之形参与实参
function c(a,b){return ab;}var sumc(3,4);console.log(sum);a,b为形参 3,4为实参 形参和实参是⼀⼀对应的数量可以不对应参数的类型不确定函数可以设置默认参数实参可以是字⾯量也可以是变量...

PAT 乙级1090危险品装箱
题目: 集装箱运输货物时,我们必须特别小心,不能把不相容的货物装在一只箱子里。比如氧化剂绝对不能跟易燃液体同箱,否则很容易造成爆炸。 本题给定一张不相容物品的清单,需要你检查每一张集装箱货品清单,…...
Response Header中不暴露Server(IIS)版本、ASP.NET及相关版本等信息
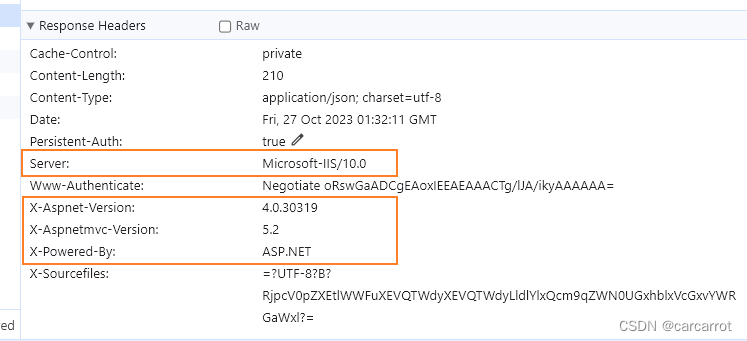
ASP MVC开发的Web默认情况下会在请求的回应中暴露Server、X-AspNet-Version、X-AspNetMvc-Version、X-Powered-By等相关服务端信息,公开这些敏感信息会存在一定的安全风险。 X-SourceFiles标头用于被IIS / IIS Express中某些调试模块理解,它包含到磁盘上…...

测试C#调用Vlc.DotNet组件播放视频
除了Windows Media Player组件,在百度上搜索到还有不少文章介绍采用Vlc.DotNet组件播放视频,关于Vlc.DotNet的详细介绍见参考文献1,本文学习Vlc.DotNet的基本用法。 VS2022中新建基于.net core的winform程序,在Nuget包管理器中…...
)
JS的事件委托(Event Delegation)
✨ 事件委托(Event Delegation)及其优势和缺点 🎃 什么是事件委托 事件委托是一种在JavaScript中处理事件的技术。它利用了事件的冒泡机制,将事件处理程序绑定到它们的共同祖先元素上,而不是直接绑定到每个子元素上。…...

selenium+python自动化安装驱动 碰到的问题
刚开始使用谷歌驱动,我的谷歌浏览器版本是最新版下载驱动地址,访问不了。 Chrome for Testing availability只能使用火狐驱动,我这里的火狐版本也是最新版119.0 查找全网找到驱动geckodriver下载地址 https://mirrors.huaweicloud.com/ge…...
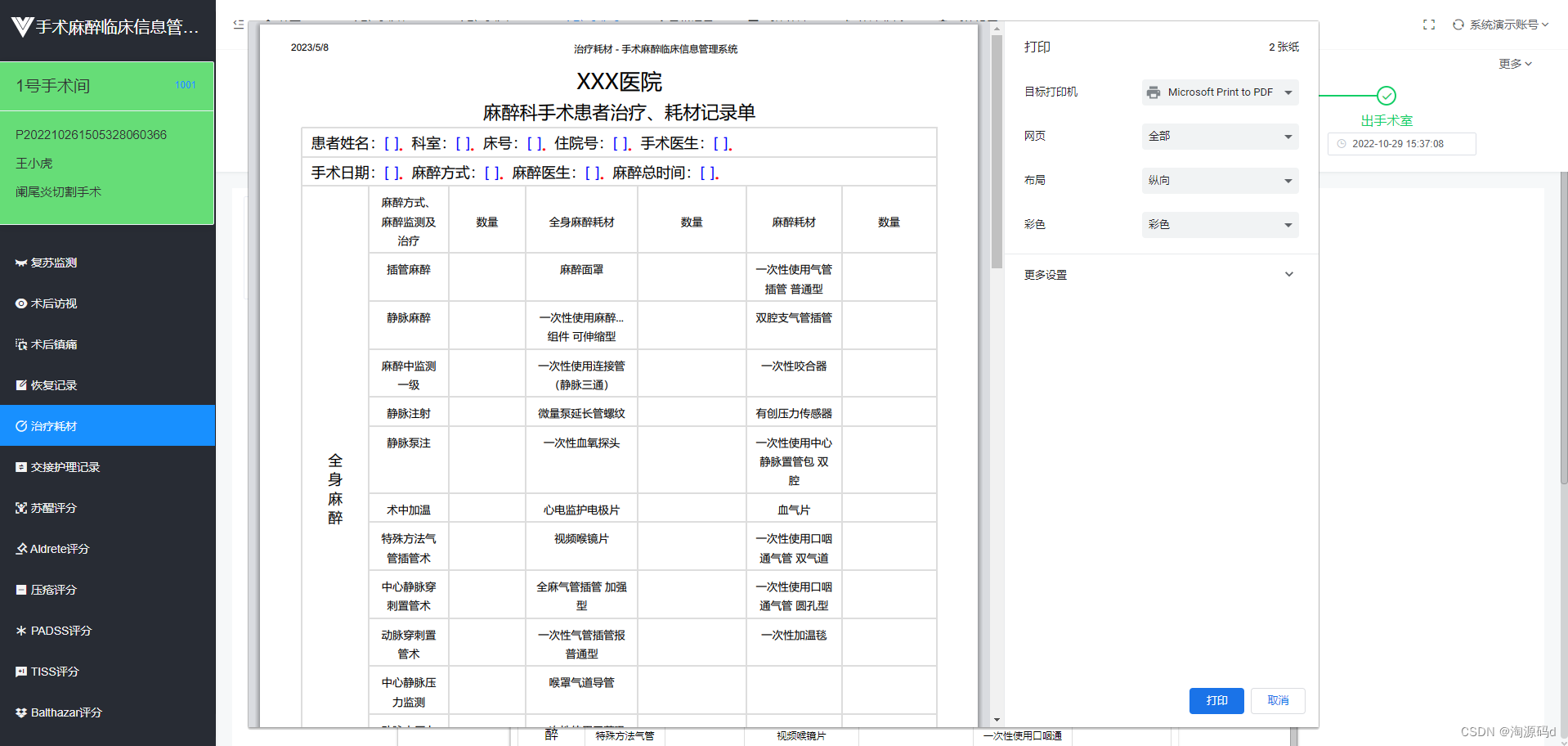
laravel+vue2 element 一套项目级医院手术麻醉信息系统源码
手术麻醉临床信息系统源码,PHPmysqllaravelvue2 手术麻醉临床信息系统,采用计算机和通信技术,实现监护仪、麻醉机、输液泵等设备输出数据的自动采集,采集的数据能够如实准确地反映患者生命体征参数的变化,并实现信息高…...

GEE——使用MODIS GPP和LAI数据进行一元线性回归计算和R2分析
使用两种方法计算一元线性回归,一种使用GEE本身自带的函数,另一种使用自己编写代码的方式进行,对比两者结果的差异。 简介 一元线性趋势分析是指利用一元线性回归模型来分析一组数据的趋势性。在一元线性回归模型中,我们假设自变量(x)和因变量(y)之间存在一定的线性关…...

[论文阅读]Point Density-Aware Voxels for LiDAR 3D Object Detection(PDV)
PDV Point Density-Aware Voxels for LiDAR 3D Object Detection 论文网址:PDV 论文代码:PDV 简读论文 摘要 LiDAR 已成为自动驾驶中主要的 3D 目标检测传感器之一。然而,激光雷达的发散点模式随着距离的增加而导致采样点云不均匀&#x…...
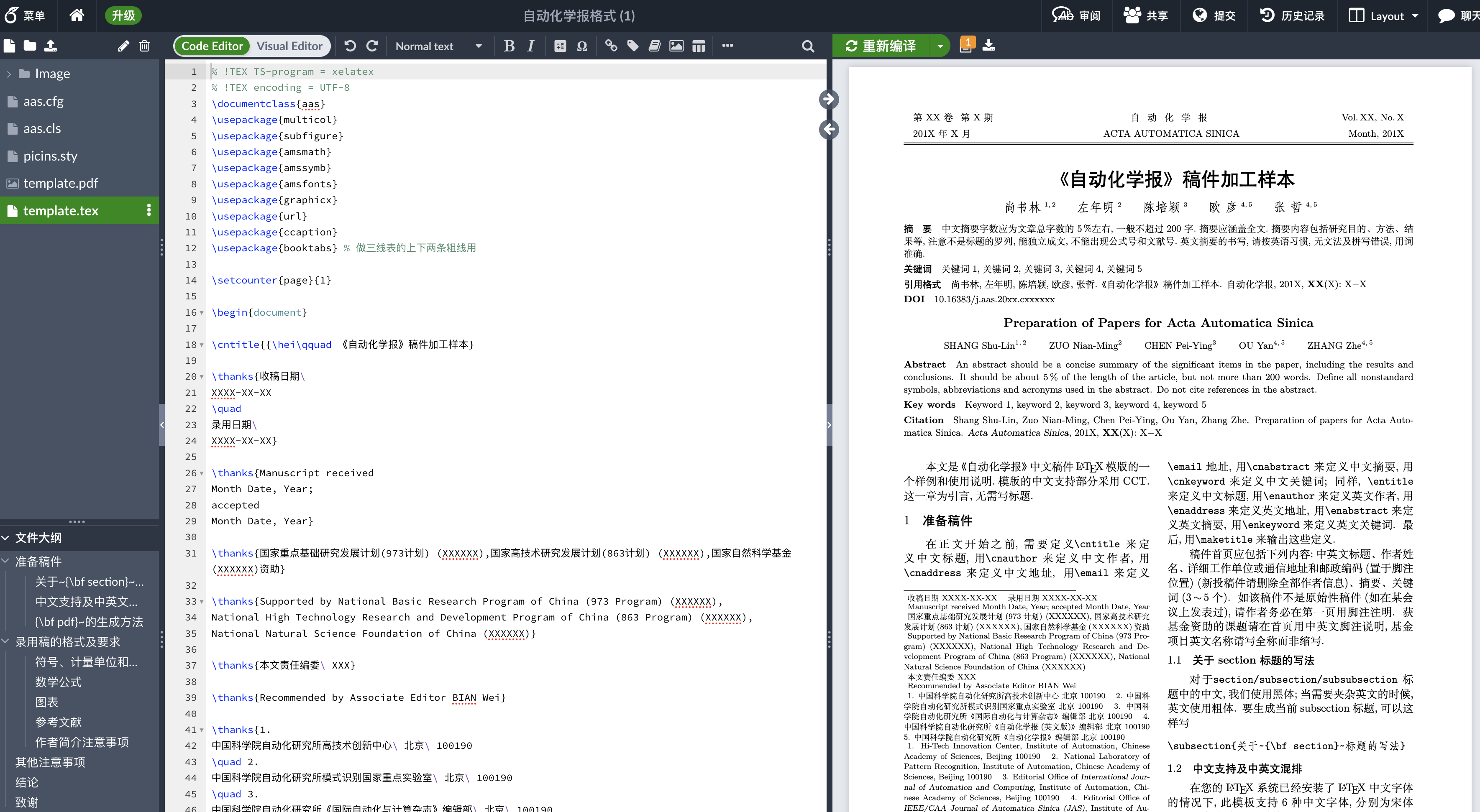
自动化学报格式 Overleaf 在线使用 【2023最新教程】
自动化学报格式 Overleaf 在线使用 摘要 2023年10月26日19:28:17(云南昆明) 今天课程老师要我们期末提交一篇论文,以自动化学报格式提交。因此,去官网发现只有 latex 格式,下载下来发现各种格式不兼容;由于…...
掌握CSS动画技巧:打造引人注目的页面过渡效果!
🎬 江城开朗的豌豆:个人主页 🔥 个人专栏 :《 VUE 》 《 javaScript 》 📝 个人网站 :《 江城开朗的豌豆🫛 》 ⛺️ 生活的理想,就是为了理想的生活 ! 目录 ⭐ 专栏简介 📘 文章引言 一…...

薛定谔的猫重出江湖?法国初创公司AliceBob研发猫态量子比特
总部位于巴黎的初创公司Alice&Bob使用超导芯片的两个相反的量子态(他们称之为“猫态量子比特”芯片)来帮助开发量子计算的不同自旋方式。(图片来源:网络) 有的人认为,构建量子计算机的模块模仿了著名的…...
18亿欧元大动作,法国瞄准实现量子飞跃
Quobly 正在开发一种容错量子处理器(图片来源:网络) 2021年1月,马克龙总统宣布了法国国家量子计算计划,并将为该技术投入高达18亿欧元。 “量子战略至关重要,”马克龙在量子研究中心巴黎萨克雷大学宣布该…...

独立开发者如何借助Taotoken多模型能力打造全能AI助手应用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何借助Taotoken多模型能力打造全能AI助手应用 对于独立开发者或小型工作室而言,构建一个功能全面的AI助手…...

城通网盘解析工具终极指南:免费获取高速直连下载地址
城通网盘解析工具终极指南:免费获取高速直连下载地址 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 你是否厌倦了城通网盘那令人抓狂的下载速度?每次下载文件都要面对漫长的等待…...

ViGEmBus终极指南:Windows游戏手柄模拟驱动的完整解决方案
ViGEmBus终极指南:Windows游戏手柄模拟驱动的完整解决方案 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus 你是否曾经遇到过这样的情况ÿ…...

Qdrant Python客户端全解析:从向量数据库连接到AI应用开发实战
1. 项目概述:从向量数据库到客户端,现代AI应用落地的关键拼图如果你最近在折腾大语言模型应用,或者想给自己的产品加上一个“智能大脑”,那你大概率已经听过“向量数据库”这个词了。简单来说,它就像一个专门为AI模型设…...

NCM格式转换实战指南:ncmdumpGUI全面解析
NCM格式转换实战指南:ncmdumpGUI全面解析 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾为网易云音乐下载的NCM格式音乐无法在其他设备播…...

开源技能库构建指南:Git+Markdown+Docsify打造个人技术知识体系
1. 项目概述:一个开源技能库的诞生与价值在技术领域,尤其是软件开发、运维和数据分析等方向,我们每天都在与海量的工具、框架和命令打交道。时间一长,一个很现实的问题就摆在了面前:那些曾经花了好几个小时才调通的复杂…...
)
STM8硬件IIC驱动BNO055传感器避坑指南(附完整代码)
STM8硬件IIC驱动BNO055传感器实战解析与优化 BNO055作为一款集成了9轴传感器融合算法的智能芯片,能够直接输出姿态角数据,极大简化了嵌入式系统中姿态解算的复杂度。然而在实际应用中,许多开发者发现使用STM32等常见MCU的模拟IIC接口难以稳定…...
)
【Midjourney数字艺术风格终极指南】:20年AI视觉专家亲授7大核心风格参数调优法则(含V6.1新增Realism Mode实测数据)
更多请点击: https://intelliparadigm.com 第一章:Midjourney数字艺术风格演进与V6.1核心变革 Midjourney自V1发布以来,其图像生成范式经历了从纹理模拟到语义理解、从风格模仿到跨模态协同的深层跃迁。V6.1标志着模型首次在原生架构中集成…...

如何在Windows上无缝安装安卓应用:APK安装器终极指南
如何在Windows上无缝安装安卓应用:APK安装器终极指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾在电脑上羡慕安卓应用的便利,却苦…...

Arm Iris组件参数化建模与调试实践
1. Arm Iris组件概述与核心价值Arm Iris组件是Fast Models仿真平台中的关键模块,它为芯片设计验证和软件开发提供了高度参数化的虚拟原型环境。作为一名长期从事Arm架构开发的工程师,我发现Iris组件的设计理念完美体现了"配置即硬件"的思想——…...