【目标跟踪】多目标跟踪测距
文章目录
- 前言
- python代码(带注释)
- main.py
- sort.py
- kalman.py
- distance.py
- 结语
前言
- 先放效果图。目标框内左上角,显示的是目标距离相机的纵向距离。目标横向距离、速度已求出,没在图片展示。
- 这里不仅仅实现对目标检测框的跟踪,且可以实现单相机进行对目标进行测距跟踪。
- 想了解详细原理可以参考往期博客:【目标跟踪】多目标跟踪sort (python 代码) 。这里不过多赘述,直接上代码,如有疑问,欢迎私信交流。

python代码(带注释)
- 代码输入:1、连续帧图片,2、每帧图片的检测结果。(需要数据的可以私信我)
- 代码参考:git地址
- 输出结果以视频形式保存

main.py
检测结果为 det.txt ,图片格式为 000001.jpg 。用的是跟踪挑战开源数据。
这部分代码主要是加载检测数据,读取图片。调用跟踪与测距接口进行计算
可以设置 dispaly 与 video_save 是否 show 图片 与保存视频
x_p 里面包含目标离相机纵向与横向距离,还有速度、加速度。可以自行更改 putText 图片展示信息
import os
import cv2
from sort import *if __name__ == '__main__':display, video_save = False, True # 是否show,结果是否存视频max_age, min_hits, iou_threshold = 3, 3, 0.3 # sort算法参数colours = 255 * np.random.rand(32, 3) # 随机生产颜色video = cv2.VideoWriter("video.mp4", cv2.VideoWriter_fourcc('m', 'p', '4', 'v'), 10,(1920, 1080)) if video_save else Nonemot_tracker = Sort(max_age=max_age, min_hits=min_hits, iou_threshold=iou_threshold) # 创建sort跟踪器seq_dets = np.loadtxt("det.txt", delimiter=',') # 加载检测txt结果for frame in range(int(seq_dets[:, 0].max())):frame += 1 # 从1帧开始dets = seq_dets[seq_dets[:, 0] == frame, 2:7]dets[:, 2:4] += dets[:, 0:2] # [x1,y1,w,h] to [x1,y1,x2,y2] 左上角x1,y1,w,h ——>左上角x1,y1,右下角x2,y2mot_tracker.update(dets) # kalman 预测与更新trackers = mot_tracker.trackersimage_path = os.path.join(".\\img", '%06d.jpg' % (frame)) # 图片路径image = cv2.imread(image_path)# x_p 目标横向、纵向距离。速度以及加速度for d, x_p in trackers:x1, y1, w, h = d.get_state()[0] # 获取 当前目标框状态id = d.idcolor = colours[int(id) % 32, :]color = (int(color[0]), int(color[1]), int(color[2]))cv2.rectangle(image, (int(x1), int(y1)), (int(w), int(h)), color, 3) # 画框cv2.putText(image, str(int(id)), (int(x1), int(y1) - 10), cv2.FONT_HERSHEY_SIMPLEX, 1,color, 3) # 画idcv2.putText(image, str(np.round(x_p[0][0], 2)), (int(x1), int(y1) + 30),cv2.FONT_HERSHEY_SIMPLEX, 1,color, 3) # 画距离if display:cv2.namedWindow("show")cv2.imshow("show", image)cv2.waitKey(0)if video_save:video.write(image)sort.py
这部分代码为核心计算代码,主要调用 kalman 预测 predict 与 更新 update
在跟踪航迹 self.trackers 里面添加距离信息,也进行一个预测与更新,不参与匹配权重的运算。
主要对测距起到一个平滑的作用。
from __future__ import print_function
from kalman import *
from distance import *def linear_assignment(cost_matrix):try:import lap_, x, y = lap.lapjv(cost_matrix, extend_cost=True)return np.array([[y[i], i] for i in x if i >= 0]) #except ImportError:from scipy.optimize import linear_sum_assignmentx, y = linear_sum_assignment(cost_matrix)return np.array(list(zip(x, y)))def iou_batch(bb_test, bb_gt):bb_gt = np.expand_dims(bb_gt, 0)bb_test = np.expand_dims(bb_test, 1)xx1 = np.maximum(bb_test[..., 0], bb_gt[..., 0])yy1 = np.maximum(bb_test[..., 1], bb_gt[..., 1])xx2 = np.minimum(bb_test[..., 2], bb_gt[..., 2])yy2 = np.minimum(bb_test[..., 3], bb_gt[..., 3])w = np.maximum(0., xx2 - xx1)h = np.maximum(0., yy2 - yy1)wh = w * ho = wh / ((bb_test[..., 2] - bb_test[..., 0]) * (bb_test[..., 3] - bb_test[..., 1])+ (bb_gt[..., 2] - bb_gt[..., 0]) * (bb_gt[..., 3] - bb_gt[..., 1]) - wh)return (o)def associate_detections_to_trackers(detections, trackers, iou_threshold=0.3):if (len(trackers) == 0):return np.empty((0, 2), dtype=int), np.arange(len(detections)), np.empty((0, 5), dtype=int)iou_matrix = iou_batch(detections, trackers)if min(iou_matrix.shape) > 0:a = (iou_matrix > iou_threshold).astype(np.int32)if a.sum(1).max() == 1 and a.sum(0).max() == 1:matched_indices = np.stack(np.where(a), axis=1)else:matched_indices = linear_assignment(-iou_matrix)else:matched_indices = np.empty(shape=(0, 2))unmatched_detections = []for d, det in enumerate(detections):if (d not in matched_indices[:, 0]):unmatched_detections.append(d)unmatched_trackers = []for t, trk in enumerate(trackers):if (t not in matched_indices[:, 1]):unmatched_trackers.append(t)matches = []for m in matched_indices:if (iou_matrix[m[0], m[1]] < iou_threshold):unmatched_detections.append(m[0])unmatched_trackers.append(m[1])else:matches.append(m.reshape(1, 2))if (len(matches) == 0):matches = np.empty((0, 2), dtype=int)else:matches = np.concatenate(matches, axis=0)return matches, np.array(unmatched_detections), np.array(unmatched_trackers)class Sort(object):def __init__(self, max_age=1, min_hits=3, iou_threshold=0.3):self.max_age = max_ageself.min_hits = min_hitsself.iou_threshold = iou_thresholdself.trackers = []self.frame_count = 0self.distance_kalman = Distance(0.1) # 0.1s 1s 十帧self.p = np.eye(6) # 初始化协方差self.r_t = np.array([0, 0, 1, 0,1, 0, 0, 0,0, 1, 0, 1.2,0., 0., 0., 1.]).reshape(4, 4) # 相机外参self.k = np.array([1000, 0.0, 960, 0.0, 1000, 540, 0.0, 0.0, 1.0]).reshape(3, 3) # 相机内参self.h = 1.2 # 相机离地面高度 1.2 mself.pitch = 0 # 相机 pitch (俯仰角)def update(self, dets=np.empty((0, 5))):self.frame_count += 1# 根据上一帧航迹的框 预测当前帧的框.trks = np.zeros((len(self.trackers), 5))to_del, ret = [], []for t, trk in enumerate(trks):pos = self.trackers[t][0].predict()[0] # 预测框的状态self.trackers[t][1] = self.distance_kalman.predict_kalman(self.trackers[t][1]) # 预测距离的状态trk[:] = [pos[0], pos[1], pos[2], pos[3], 0]if np.any(np.isnan(pos)):to_del.append(t)trks = np.ma.compress_rows(np.ma.masked_invalid(trks))for t in reversed(to_del):self.trackers.pop(t)# 匈牙利匹配 上一帧预测框与当前帧检测框进行 iou 匹配matched, unmatched_dets, unmatched_trks = associate_detections_to_trackers(dets, trks, self.iou_threshold)# 如果匹配上 则更新修正当前检测框for m in matched:det = dets[m[0], :]distance = get_distance((det[0] + det[2]) / 2, det[3], self.h, self.pitch, self.k, self.r_t[:3, :3],self.r_t[:3, 3])self.trackers[m[1]][1] = self.distance_kalman.updata_kalman([distance[0], distance[1]],self.trackers[m[1]][1])self.trackers[m[1]][0].update(det)# 如果检测框未匹配上,则当作新目标,新起航迹for i in unmatched_dets:det = dets[i, :]distance = get_distance((det[0] + det[2]) / 2, det[3], self.h, self.pitch, self.k, self.r_t[:3, :3],self.r_t[:3, 3]) # 目标测距# 目标状态 (x,y,vx,vy,ax,ay) kalman协方差x_p = (np.array([[distance[0], 0, 0, distance[1], 0, 0]]).T, self.p)trk = [KalmanBoxTracker(det), x_p]self.trackers.append(trk)i = len(self.trackers)for trk in reversed(self.trackers):d = trk[0].get_state()[0]if (trk[0].time_since_update < 1) and (trk[0].hit_streak >= self.min_hits or self.frame_count <= self.min_hits):ret.append(np.concatenate((d, [trk[0].id + 1])).reshape(1, -1)) # +1 as MOT benchmark requires positivei -= 1# 如果超过self.max_age(3)帧都没有匹配上,则应该去除这个航迹if (trk[0].time_since_update > self.max_age):self.trackers.pop(i)if (len(ret) > 0):return np.concatenate(ret)return np.empty((0, 5))
kalman.py
这部分代码是 kalman 算法核心代码
主要对目标框 bbox 进行预测与更新。bbox 状态为 [center_x, center_y, s, r, center_x’, center_y’, s’]
s = w * h r = w / h bbox 宽高比保持不变
import numpy as np
from filterpy.kalman import KalmanFilterdef convert_bbox_to_z(bbox):w = bbox[2] - bbox[0]h = bbox[3] - bbox[1]x = bbox[0] + w / 2.y = bbox[1] + h / 2.s = w * hr = w / float(h)return np.array([x, y, s, r]).reshape((4, 1))def convert_x_to_bbox(x, score=None):w = np.sqrt(x[2] * x[3])h = x[2] / wif (score == None):return np.array([x[0] - w / 2., x[1] - h / 2., x[0] + w / 2., x[1] + h / 2.]).reshape((1, 4))else:return np.array([x[0] - w / 2., x[1] - h / 2., x[0] + w / 2., x[1] + h / 2., score]).reshape((1, 5))class KalmanBoxTracker(object):count = 0def __init__(self, bbox):self.kf = KalmanFilter(dim_x=7, dim_z=4)self.kf.F = np.array([[1, 0, 0, 0, 1, 0, 0],[0, 1, 0, 0, 0, 1, 0],[0, 0, 1, 0, 0, 0, 1],[0, 0, 0, 1, 0, 0, 0],[0, 0, 0, 0, 1, 0, 0],[0, 0, 0, 0, 0, 1, 0],[0, 0, 0, 0, 0, 0, 1]])self.kf.H = np.array([[1, 0, 0, 0, 0, 0, 0], [0, 1, 0, 0, 0, 0, 0], [0, 0, 1, 0, 0, 0, 0], [0, 0, 0, 1, 0, 0, 0]])self.kf.R[2:, 2:] *= 10.self.kf.P[4:, 4:] *= 1000.self.kf.P *= 10.self.kf.Q[-1, -1] *= 0.01self.kf.Q[4:, 4:] *= 0.01self.kf.x[:4] = convert_bbox_to_z(bbox)self.time_since_update = 0self.id = KalmanBoxTracker.countKalmanBoxTracker.count += 1self.history = []self.hits = 0self.hit_streak = 0self.age = 0def update(self, bbox):self.time_since_update = 0self.history = []self.hits += 1self.hit_streak += 1self.kf.update(convert_bbox_to_z(bbox))def predict(self):if ((self.kf.x[6] + self.kf.x[2]) <= 0):self.kf.x[6] *= 0.0self.kf.predict()self.age += 1if (self.time_since_update > 0):self.hit_streak = 0self.time_since_update += 1self.history.append(convert_x_to_bbox(self.kf.x))return self.history[-1]def get_state(self):return convert_x_to_bbox(self.kf.x)
distance.py
这部分代码是测距核心代码,以及对目标测距的预测与更新
目标状态为 (x,y,vx,vy,ax,ay) 目标横向距离,纵向距离,横向速度,纵向速度,横向加速度,纵向加速度。
关于目标前后帧匹配,是利用 iou 匹配进行的,所以要基于目标检测框的匹配跟踪。
import numpy as npdef get_distance(pixe_x, pixe_y, h, pitch, K, R, T):sigma = np.arctan((pixe_y - K[1][2]) / K[1][1])z = h * np.cos(sigma) / np.sin(sigma + pitch) # 深度x_pixe, y_pixe = 2 * K[0][2] - pixe_x, 2 * K[1][2] - pixe_ycamera_x = z * (x_pixe / K[0][0] - K[0][2] / K[0][0])camera_y = z * (y_pixe / K[1][1] - K[1][2] / K[1][1])camera_z = zx = R[0][0] * camera_x + R[0][1] * camera_y + R[0][2] * camera_z + T[0]y = R[1][0] * camera_x + R[1][1] * camera_y + R[1][2] * camera_z + T[1]# z = R[2][0] * camera_x + R[2][1] * camera_y + R[2][2] * camera_z + T[2]return x, yclass Distance():def __init__(self, t):self.t = t # 时间间隔0.1sself.F = np.array([[1, t, t * t / 2, 0, 0, 0],[0, 1, t, 0, 0, 0],[0, 0, 1, 0, 0, 0],[0, 0, 0, 1, t, t * t / 2],[0, 0, 0, 0, 1, t],[0, 0, 0, 0, 0, 1]])self.sigma_a = 0.02 # 加速度误差0.2m/s2self.sigma_x, self.sigma_y = 0.3, 0.2 # x、y测量距离误差self.Q = np.array([[np.power(t, 4) / 4, np.power(t, 3) / 3, np.power(t, 2) / 2, 0, 0, 0],[np.power(t, 3) / 3, np.power(t, 2) / 2, t, 0, 0, 0],[np.power(t, 2) / 2, t, 1, 0, 0, 0],[0, 0, 0, np.power(t, 4) / 4, np.power(t, 3) / 3, np.power(t, 2) / 2],[0, 0, 0, np.power(t, 3) / 3, np.power(t, 2) / 2, t],[0, 0, 0, np.power(t, 2) / 2, t, 1]]) * self.sigma_a * self.sigma_a # 过程噪声矩阵self.R_n = np.array([[self.sigma_x ** 2, 0], [0, self.sigma_y ** 2]]) # 测量噪声协方差self.H = np.array([[1, 0, 0, 0, 0, 0], [0, 0, 0, 1, 0, 0]])def updata_kalman(self, Z, X_P):""":param Z:测量值:param X:状态矩阵 [x,vx,ax,y,vy,ay]:param P:状态协方差矩阵:return:更新后的X,P"""X, P = X_P# print(H @ P @ H.T)Z_1 = np.array([Z]).T# print(Z_1)K = P @ np.transpose(self.H) @ np.linalg.inv(np.dot(np.dot(self.H, P), np.transpose(self.H)) + self.R_n)# print(H @ K)X = X + K @ (Z_1 - self.H @ X)P = (np.identity(6) - K @ self.H) @ P @ np.transpose(np.identity(6) - K @ self.H) + K @ self.R_n @ np.transpose(K)return X, Pdef predict_kalman(self, X_P):X, P = X_PX = self.F @ XP = self.F @ P @ np.transpose(self.F) + self.Qreturn X, P
结语
- 运行 main.py ,结果会保存视频。博主在本地是跑通的,如果有什么疑问,可以私信交流。
- 关于数据,我是在网上找的开源数据跑的。相机的参数是模拟的。
相关文章:
【目标跟踪】多目标跟踪测距
文章目录 前言python代码(带注释)main.pysort.pykalman.pydistance.py 结语 前言 先放效果图。目标框内左上角,显示的是目标距离相机的纵向距离。目标横向距离、速度已求出,没在图片展示。这里不仅仅实现对目标检测框的跟踪&#…...
吐血整理,服务端性能测试-Docker部署MySQL/Nginx(详细步骤)
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 基于Docker部署My…...

基于单片机设计的智能窗帘控制系统
一、前言 智能家居技术在近年来取得了巨大的发展,并逐渐成为人们日常生活中的一部分。智能家居系统带来了便利、舒适和高效的生活体验,拥有广泛的应用领域,其中之一就是智能窗帘控制系统。 传统窗帘需要手动操作,打开或关闭窗帘…...

WSL的秘钥被修改了要怎么弄
WSL的秘钥被修改了要怎么弄 gitgithub.com: Permission denied (publickey).ssh-add -l但是我是想加到github上的guiaguaide1.github.com里面哎,为什么这个是shengyi gitgithub.com: Permission denied (publickey). git push -u origin报错 aaaASUS:~/ML/paper/A…...

cesium开发引入方式
无独有偶,引入无非两种方式:外部标签引入和import导入。 1、外部引入 外部引入的话需要提前去下载开发包,下载完后,Build文件夹有两个文件夹:Cesium和CesiumUnminified,Cesium是压缩版的,Cesiu…...
无缝的链间互操作性:通用消息传递的强大之处
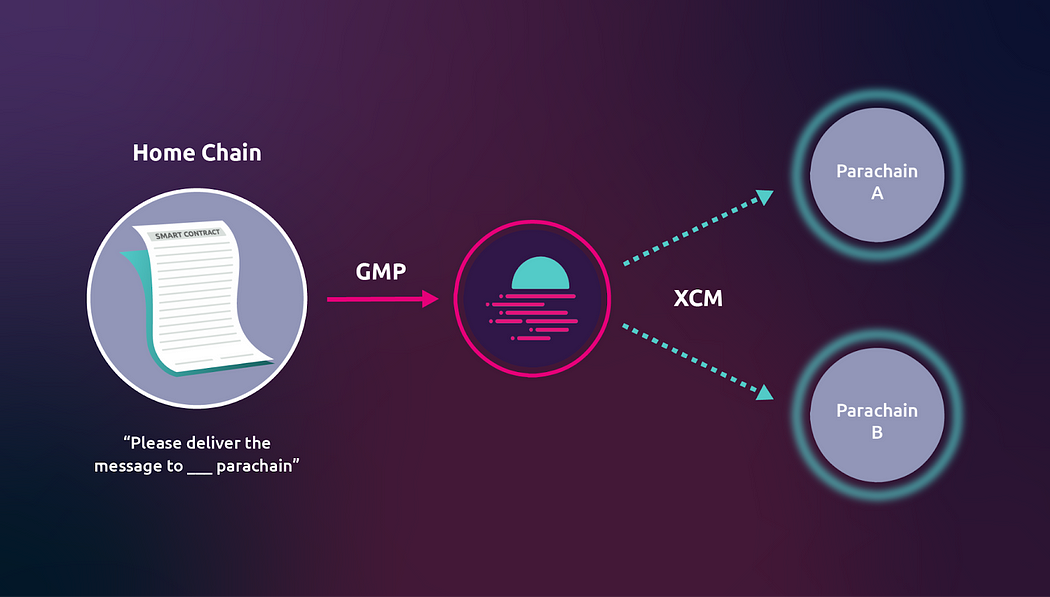
前言 通用消息传递(General Message Passing,GMP)是一种支持区块链之间通信和数据传输的机制。GMP正在成为增强不同区块链网络之间互操作性的解决方案。GMP允许应用程序构建者通过使用安全消息在区块链之间通信和交换信息来利用任何区块链的…...
minio + linux + docker + spring boot实现文件上传与下载
minio docker spring boot实现文件上传与下载 1.在linux上安装并启动docker2.在docker中拉取minio并启动3.Spring Boot 整合 minio4.测试 minio 文件上传、下载及图片预览等功能 1.在linux上安装并启动docker 检查linux内核,必须是3.10以上 uname ‐r安装docker…...

vue ant DatePicker 日期选择器 限制日期可控范围
场景 限制当前日期之前不能选择 限制只能选择日期区间内 Ant Design Vue 效果 <a-date-picker :disabledDate"disabledDate"></a-date-picker>method // 限制日期选择disabledDate(current) {return current && current > moment().endOf(&…...

linux 音视频架构 linux音视频开发
linux 音视频架构 linux音视频开发 转载 mob6454cc65110a 2023-07-26 22:27:01 文章标签 linux 音视频架构 ci QT 视频教程 文章分类 架构 后端开发 阅读数117 目录 前言1、软件工具准备a. 录音软件b. 录屏软件c. 摄像头软件d. 安卓屏幕操作软件e. 视频剪辑软件2、视频教…...

el-table添加固定高度height后高度自适应
0 效果 1 添加自定义指令 新建目录src/directive/el-table 在el-table目录下新建文件adaptive.js import { addResizeListener, removeResizeListener } from element-ui/src/utils/resize-event// 设置表格高度const doResize async(el, binding, vnode) > {// 获取表格…...
)
Python分享之多进程探索 (multiprocessing包)
在初步了解Python多进程之后,我们可以继续探索multiprocessing包中更加高级的工具。这些工具可以让我们更加便利地实现多进程。 进程池 进程池 (Process Pool)可以创建多个进程。这些进程就像是随时待命的士兵,准备执行任务(程序)。一个进程池中可以容…...
Boris FX Mocha Pro 2023:Mac/win全能影像处理神器
Boris FX Mocha Pro 2023是一款广受欢迎的影像处理软件,它凭借其强大的功能和卓越的性能,成为了影视后期、广告制作、动画设计等领域的必备工具。无论您是专业的影视制作人员,还是初入行的新手,Boris FX Mocha Pro 2023都能为您的…...

elementUI 特定分辨率(如1920*1080)下el-row未超出一行却换行
在1920*1080分辨率下, el-col 内容未超出 el-col 宽度,el-col 不足以占据一行,el-row 却自动换行了(其他分辨率没有这个问题)。 截图: 排查: el-col 内容没有溢出;没有多余的 pad…...
mac电脑视频处理推荐:达芬奇DaVinci Resolve Studio 18 中文最新
DaVinci Resolve Studio 18是一款专业的视频编辑、调色和后期制作软件,由Blackmagic Design开发。它被广泛应用于电影、电视和广告等行业,提供了全面的工具和功能,使用户能够进行高质量的影片制作和后期处理。 以下是DaVinci Resolve Studio…...

OKLink携手CertiK在港举办Web3生态安全主题论坛
2023年10月23日,OKLink与CertiK共同发起的Web3生态安全主题论坛在香港铜锣湾拉开帷幕。本次论坛由OKLink和CertiK主办,香港投资推广署独家支持,聚焦如何构建安全可靠的Web3生态系统议题,同时深入剖析这一进程中所面临的潜在挑战。…...
王道p40 1.设计一个递归算法,删除不带头结点的单链表L中的所有值为x的结点(c语言代码实现)图解递归
视频讲解(献丑了):p40 第1题 王道数据结构课后代码题c语言代码实现_哔哩哔哩_bilibilihttps://www.bilibili.com/video/BV1Xa4y1Q7ui/?spm_id_from333.999.0.0 首先它是一个不带头结点的单链表 我们就得特殊处理 我们先让*LNULL; 然后为s开辟一个新…...
深入浅出排序算法之希尔排序
目录 1. 原理 2. 代码实现 3. 性能分析 1. 原理 希尔排序法又称缩小增量法。希尔排序法的基本思想是:先选定一个整数,把待排序文件中所有记录分成个组,所有距离为的记录分在同一组内,并对每一组内的记录进行排序。然后…...

close excel by keyword 根据关键字关闭 excel 窗口 xlwings 方式实现
根据标题关键字关闭 workbook,如果没有打开的 workbook 则退出 excel xlwings 方式实现 更方便快捷 def close_excel_by_keyword(keyword):if ~$ in keyword:returnapp xw.apps.activefor workbook in app.books:if keyword in workbook.name:workbook.close()fi…...

LIO-SAM算法解析
文章目录 简介算法概述1.点云去畸变1.1 主要功能1.2 主要流程 2.特征提取3.IMU预积分4.地图优化5.算法评估 简介 LIO-SAM在lego-loam的基础上新增了对IMU和GPS的紧耦合,采用一个因子图对位姿进行优化,包括IMU因子,激光里程计因子,…...

vscode 提升小程序开发效率的必备插件与工具
1,微信小程序开发助手(WeChat Snippet):提供了小程序代码片段、模板和快速生成页面的功能,加快了开发速度。 2,小程序助手(Minapp):提供了小程序项目创建、编译、预览和…...

InsForge:基于Python的Instagram内容自动化创作与发布工具全解析
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫InsForge。这名字听起来有点“工业锻造”的味道,实际上,它是一个专注于Instagram内容创作与自动化的工具集。简单来说,它试图帮你解决在Instagram上创作、发布、管理内容…...

AI智能体密钥安全管理:AgentVault架构解析与实战指南
1. 项目概述:一个为AI智能体打造的“保险箱”最近在折腾AI智能体(Agent)应用开发的朋友,估计都绕不开一个核心痛点:如何安全、可靠地管理智能体运行过程中需要用到的各种密钥、凭证和敏感数据?无论是调用Op…...

恶劣环境下LED发光服饰的可靠系统构建:从设计到工艺的工程实践
1. 项目概述与核心挑战如果你曾经尝试过制作一件会发光的服装,无论是为了音乐节、万圣节还是水下表演,你大概都体会过那种“亮一次,修三次”的挫败感。LED灯带在工作室的桌面上测试时完美无瑕,一旦穿到身上,开始活动、…...
深入Transformer内部:LoRA到底改动了哪部分权重才让模型“学会”新任务?
深入Transformer内部:LoRA如何通过低秩更新重塑大模型能力 在自然语言处理领域,大型预训练模型的微调一直是个计算密集型任务。传统全参数微调需要更新数十亿甚至数千亿参数,这对大多数研究者和企业来说都是难以承受的负担。低秩适应(LoRA)技…...

如何在10分钟内搭建个人游戏流媒体服务器:Sunshine跨平台游戏串流完全指南
如何在10分钟内搭建个人游戏流媒体服务器:Sunshine跨平台游戏串流完全指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 您是否梦想过在任何设备上畅玩PC游戏&#x…...

技术视角:Sketchfab数据提取工具深度解析3D模型下载机制
技术视角:Sketchfab数据提取工具深度解析3D模型下载机制 【免费下载链接】sketchfab sketchfab download userscipt for Tampermonkey by firefox only 项目地址: https://gitcode.com/gh_mirrors/sk/sketchfab 在WebGL技术日益成熟的今天,Sketch…...

芯片老化座的工作温度范围?
在芯片测试领域,老化座(Burn-in Socket)是保障半导体器件长期可靠性的关键设备。它不仅要在极端温度下稳定工作,还要确保测试数据的精准度。今天,我们以HMILU(深圳市鸿怡电子有限公司)为例&…...
)
中文长文本语音崩溃?ElevenLabs API超时/截断/静音突变?20年语音架构师紧急发布的6行容错重试+分段重对齐代码(已验证10万+字符稳定输出)
更多请点击: https://intelliparadigm.com 第一章:中文长文本语音崩溃的根因诊断与现象复现 中文长文本语音合成(TTS)在处理超长段落(如 >3000 字)时频繁出现进程中断、内存溢出或静音输出,…...

m4s-converter终极指南:如何无损转换B站缓存视频并保留弹幕
m4s-converter终极指南:如何无损转换B站缓存视频并保留弹幕 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 在数字内容日益丰富的今天…...

揭秘Midjourney“树胶重铬酸盐”风格指令:3步精准触发古典印相质感,92%用户从未用对的隐藏参数组合
更多请点击: https://intelliparadigm.com 第一章:树胶重铬酸盐工艺的光学原理与数字映射本质 树胶重铬酸盐(Gum Bichromate)工艺是19世纪末发展起来的经典光敏印相技术,其核心光学原理基于重铬酸盐在紫外光照射下发生…...