OpenCV 相机相关函数
一、变换参数矩阵的求解
1. 计算三个二维点对之间的仿射变换矩阵:getAffineTransform()
2. 计算多个二维点对之间的最优放射变换矩阵(误差最小准则):estimateRigidTransform();或者findHomography();
3. 计算四个二维点对之间的透射变换:getPerspectiveTransform();
4. 计算多个三维点对之间的仿射变换:estimateAffine3D();
5. 计算多个点对之间的基矩阵:findFundamentalMat();
二、进行矩阵变换
1. 对输入图像进行仿射变换:warpAffine();
2. 对输入图像进行透射变换:perspectiveTransform();和warpPerspective();
3. 对输入二维点对进行仿射变换:transform(); 该函数还可用于色彩变换
4. 对输入三维点对进行透射变换:perspectiveTransform();
三、来自相机标定工具箱的函数
1. 估算物体位置和姿态:cvPOSIT();
2. 根据对应三维点恢复位置姿态,实现物体位置的二维坐标三维坐标之间的变换:solvePnP()和solvePnPRansac()
3. 合并两个旋转平移变换:composeRT()
4. 把点从欧式空间转换到齐次坐标:convertPointsToHomogeneous()
5. 把点从其次空间转换到欧式空间:convertPointsFromHomogeneous()
以上两个函数合并为:convertPointsHomogeneous()
6. 将矩阵分解:decomposeProjectionMatrix()
7. 检测棋盘格内角点的位置:findChessboardCorners()
8. 绘制检测出的棋盘格内的角点位置:drawChessboardCorners()
9. 得到圆圈光栅中圆斑的中心:findCirclesGrid()
10. 计算两幅图像关联点的基础矩阵:findFundamentalMat()
11. 计算其它图像对应的外极线:computeCorrespondEpilines()
cv2.absdiff()
cv2.accumulate()
cv2.accumulateProduct()
cv2.accumulateSquare()
cv2.accumulateWeighted()
cv2.adaptiveThreshold() # 图像自适应局部二值化
cv2.add() # 两个图像相加
cv2.addText() # 添加文字
cv2.addWeighted() # 调整图像亮度与对比度
cv2.applyColorMap()
cv2.approxPolyDP() # 多边形逼近轮廓
cv2.arcLength() # 轮廓周长,弧长
cv2.arrowedLine() # 带箭头的线
cv2.ACCESS_FAST #todocv2.batchDistance()
cv2.bilateralFilter() # 高斯双边滤波。保留图像的边缘,边缘保留滤波,用于美颜,滤镜
cv2.bitwise_and() # 两个图像的逻辑与运算
cv2.bitwise_not() # 一个图像的像素取反
cv2.bitwise_or() # 两个图像的逻辑或运算
cv2.bitwise_xor() # 异或
cv2.blur() # 图像均值模糊
cv2.borderInterpolate()
cv2.boundingRect() # 轮廓的外接矩形
cv2.boxFilter()
cv2.boxPoints()
cv2.buildOpticalFlowPyramid() # 构建光流金字塔
cv2.BackgroundSubtractor # 类,视频背景检测
cv2.BackgroundSubtractor.apply()
cv2.BackgroundSubtractor.clear
cv2.BackgroundSubtractor.empty()
cv2.BackgroundSubtractor.getBackgroundImage()
cv2.BackgroundSubtractor.getDefaultName()
cv2.BackgroundSubtractor.mro()
cv2.BackgroundSubtractor.read()
cv2.BackgroundSubtractor.save()
cv2.BackgroundSubtractor.write()
cv2.BackgroundSubtractorKNN #类
cv2.BackgroundSubtractorKNN.apply()
cv2.BackgroundSubtractorKNN.clear()
cv2.BackgroundSubtractorKNN.empty()
cv2.BackgroundSubtractorKNN.getBackgroundImage()
cv2.BackgroundSubtractorKNN.getDefaultName()
cv2.BackgroundSubtractorKNN.getDetectShadows()
cv2.BackgroundSubtractorKNN.getDist2Threshold()
cv2.BackgroundSubtractorKNN.getHistory()
cv2.BackgroundSubtractorKNN.getkNNSamples()
cv2.BackgroundSubtractorKNN.getShadowThreshold()
cv2.BackgroundSubtractorKNN.getShadowValue()
cv2.BackgroundSubtractorKNN.mro()
cv2.BackgroundSubtractorKNN.read()
cv2.BackgroundSubtractorKNN.save()
cv2.BackgroundSubtractorKNN.setDetectShadows()
cv2.BackgroundSubtractorKNN.setDist2Threshold()
cv2.BackgroundSubtractorKNN.setHistory()
cv2.BackgroundSubtractorKNN.setkNNSamples()
cv2.BackgroundSubtractorKNN.setNSamples()
cv2.BackgroundSubtractorKNN.setShadowThreshold()
cv2.BackgroundSubtractorKNN.setShadowValue()
cv2.BackgroundSubtractorKNN.write()
cv2.BackgroundSubtractorMOG2
cv2.BaseCascadeClassifier
cv2.BFMatcher # 类。Brute-Force图像特征特征匹配
cv2.BFMatcher_create()
cv2.BFMatcher.match()
cv2.BOWImgDescriptorExtractor
cv2.BOWKMeansTrainer
cv2.BOWTrainer
cv2.BRISK
cv2.BRISK_create()cv2.calcBackProject() # 在HSV色彩空间中,直方图反向投影。可用于检测目标
cv2.calcCovarMatrix()
cv2.calcHist() # 计算图像的直方图
cv2.calcOpticalFlowFarneback()
cv2.calcOpticalFlowPyrLK() # Lucas-Kanade光流算法
cv2.calibrateCamera() # 相机校正
cv2.calibrateCameraExtended()
cv2.calibrateCameraRO()
cv2.calibrateCameraROExtended()
cv2.calibrateHandEye()
cv2.calibrationMatrixValues() # 从相机矩阵中计算相机特征
cv2.cartToPolar()
cv2.checkChessboard()
cv2.checkHardwareSupport()
cv2.checkRange()
cv2.circle() # 画圆
cv2.clipLine()
cv2.CLAHE() # CLAHE直方图均衡化
cv2.colorChange()
cv2.compare()
cv2.compareHist() # 比较两个图像的直方图。可用于两个图像之间的相似性
cv2.completeSymm()
cv2.composeRT() # 旋转和平移变换的组合
cv2.computeCorrespondEpilines()
cv2.computeECC()
cv2.connectedComponents() # 图像的连通区域
cv2.connectedComponentsWithAlgorithm()
cv2.connectedComponentsWithStats()
cv2.connectedComponentsWithStatsWithAlgorithm()
cv2.contourArea() # 轮廓面积
cv2.convertFp16()
cv2.convertMaps()
cv2.convertPointsFromHomogeneous()
cv2.convertPointsToHomogeneous()
cv2.convertScaleAbs() # 绝对值变换
cv2.convexHull() # 绘制点集的凸壳
cv2.convexityDefects() # 凸面缺陷
cv2.copyMakeBorder()
cv2.copyTo()
cv2.cornerEigenValsAndVecs()
cv2.cornerHarris() #Harris角点
cv2.cornerSubPix()
cv2.correctMatches() # 修正对应点的坐标
cv2.countNonZero() # 非零值个数
cv2.createAlignMTB()
cv2.createBackgroundSubtractorKNN()
cv2.createBackgroundSubtractorMOG2() # 高斯混合模型,用于视频的背景检测
cv2.createButton()
cv2.createCalibrateDebevec()
cv2.createCalibrateRobertson()
cv2.createCLAHE() #灰度图局部自适应的直方图均衡化。
cv2.createGeneralizedHoughBallard()
cv2.createGeneralizedHoughGuil()
cv2.createHanningWindow()
cv2.createLineSegmentDetector()
cv2.createMergeDebevec()
cv2.createMergeMertens()
cv2.createMergeRobertson()
cv2.createTonemap()
cv2.createTonemapDrago()
cv2.createTonemapMantiuk()
cv2.createTonemapReinhard()
cv2.createTrackbar()
cv2.cubeRoot()
cv2.cuda()
cv2.cuda_BufferPool()
cv2.cuda_DeviceInfo()
cv2.cuda_Event()
cv2.cuda_GpuMat()
cv2.cuda_GpuMat_Allocator()
cv2.cuda_HostMem()
cv2.cuda_Stream()
cv2.cuda_TargetArchs()
cv2.cvtColor() #转换图像颜色空间。 肤色识别一般用HSV颜色空间
cv2.cvtColorTwoPlane()
cv2.CALIB_CB_ACCURACY() #todo
cv2.CalibrateCRF #类
cv2.CalibrateDebevec #类
cv2.CalibrateRobertson #类
cv2.CamShift()
cv2.Canny() # Canny边缘检测
cv2.CascadeClassifier # 类,级联分类器。例如人脸检测
cv2.CascadeClassifier_convert()cv2.data()
cv2.dct()
cv2.decolor()
cv2.decomposeEssentialMat()
cv2.decomposeHomographyMat()
cv2.decomposeProjectionMatrix() #把投影矩阵分解成旋转矩阵和相机矩阵
cv2.demosaicing()
cv2.denoise_TVL1()
cv2.destroyAllWindows()
cv2.destroyWindow()
cv2.detail()
cv2.detail_AffineBasedEstimator() #todo
cv2.dft()
cv2.dilate() # 二值图像的膨胀。膨胀后图像线条变粗
cv2.displayOverlay()
cv2.displayStatusBar()
cv2.distanceTransform() # 距离变换
cv2.distanceTransformWithLabels()
cv2.divide() #两个图像相除
cv2.dnn.blobFromImage #图像或一帧视频的缩放变换
cv2.dnn.blobFromImages
cv2.dnn.DNN_BACKEND_CUDA
cv2.dnn.DNN_BACKEND_DEFAULT
cv2.dnn.DNN_BACKEND_HALIDE
cv2.dnn.DNN_BACKEND_INFERENCE_ENGINE
cv2.dnn.DNN_BACKEND_OPENCV
cv2.dnn.DNN_BACKEND_VKCOM
cv2.dnn.DNN_TARGET_CPU
cv2.dnn.DNN_TARGET_CUDA
cv2.dnn.DNN_TARGET_CUDA_FP16
cv2.dnn.DNN_TARGET_FPGA
cv2.dnn.DNN_TARGET_MYRIAD
cv2.dnn.DNN_TARGET_OPENCL
cv2.dnn.DNN_TARGET_OPENCL_FP16
cv2.dnn.DNN_TARGET_VULKAN
cv2.dnn.imagesFromBlob
cv2.dnn.Net_readFromModelOptimizer
cv2.dnn.NMSBoxes
cv2.dnn.NMSBoxesRotated
cv2.dnn.readNet
cv2.dnn.readNetFromCaffe
cv2.dnn.readNetFromDarknet
cv2.dnn.readNetFromModelOptimizer
cv2.dnn.readNetFromONNX
cv2.dnn.readNetFromTensorflow
cv2.dnn.readNetFromTorch
cv2.dnn.readTensorFromONNX
cv2.dnn.readTorchBlob
cv2.dnn.shrinkCaffeModel
cv2.dnn.writeTextGraph
cv2.drawChessboardCorners() # 绘制图像中的黑白交界处
cv2.drawContours() # 绘制轮廓
cv2.drawFrameAxes()
cv2.drawKeypoints()
cv2.drawMarker()
cv2.drawMatches() # 画出特征点匹配的结果
cv2.drawMatchesKnn() # 画出特征点匹配的结果
cv2.DCT_INVERSE()
cv2.DenseOpticalFlow # 密集光流类
cv2.DescriptorMatcher # 描述子匹配类
cv2.DescriptorMatcher_create()
cv2.DISOpticalFlow # 类
cv2.DISOpticalFlow_create()
cv2.DMatch # 类cv2.edgePreservingFilter()
cv2.eigen()
cv2.eigenNonSymmetric()
cv2.ellipse() # 画椭圆
cv2.ellipse2Poly()
cv2.equalizeHist() # 用于灰度图的全局直方图均衡化。可用于增强图像的对比度,亮的地方更亮,黑的地方更黑。
cv2.erode() # 二值图像的腐蚀。腐蚀后图像线条变细
cv2.error()
cv2.estimateAffine2D()
cv2.estimateAffine3D()
cv2.estimateAffinePartial2D()
cv2.exp() #计算指数
cv2.extractChannel()
cv2.EMD()#todocv2.fastAtan2()
cv2.fastNlMeansDenoising()
cv2.fastNlMeansDenoisingColored()
cv2.fastNlMeansDenoisingColoredMulti()
cv2.fastNlMeansDenoisingMulti()
cv2.fillConvexPoly()
cv2.fillPoly()
cv2.filter2D() # 图像2D卷积滤波
cv2.filterHomographyDecompByVisibleRefpoints()
cv2.filterSpeckles() # 过滤掉小的噪音块
cv2.find4QuadCornerSubpix()
cv2.findChessboardCorners() # 获取图像中的黑白交界处
cv2.findChessboardCornersSB() # 获取图像中的黑白交界处
cv2.findCirclesGrid() # 寻找圆心点
cv2.findContours() # 寻找二值化图中的轮廓
cv2.findEssentialMat()
cv2.findFundamentalMat() # 计算两个图像中对应点之间的基础矩阵
cv2.findHomography() # 计算两个平面之间的透视变换
cv2.findNonZero()
cv2.findTransformECC()
cv2.fisheye # 模块,鱼眼相机模型
cv2.fisheye.calibrate
cv2.fisheye.distortPoints
cv2.fisheye.estimateNewCameraMatrixForUndistortRectify
cv2.fisheye.initUndistortRectifyMap() # 在相机标定完后,得到x轴与y轴映射
cv2.fisheye.projectPoints
cv2.fisheye.stereoCalibrate
cv2.fisheye.stereoRectify
cv2.fisheye.undistortImage
cv2.fisheye.undistortPoints
cv2.fitEllipse() # 拟合椭圆
cv2.fitEllipseAMS()
cv2.fitEllipseDirect()
cv2.fitLine()
cv2.flann()
cv2.flann_Index()
cv2.flip() # 翻转图片或视频的一帧
cv2.floodFill() # 图像泛洪填充,填充方式 cv2.FLOODFILL_FIXED_RANGE,cv2.FLOODFILL_MASK_ONLY
cv2.FarnebackOpticalFlow() #todo
cv2.FlannBasedMatcher # 类。#FLANN图像特征特征匹配
cv2.FlannBasedMatcher_create()
cv2.FlannBasedMatcher.knnMatch()cv2.gemm()
cv2.getAffineTransform()
cv2.getBuildInformation()
cv2.getCPUTickCount()
cv2.getDefaultNewCameraMatrix()
cv2.getDerivKernels()
cv2.getFontScaleFromHeight()
cv2.getGaborKernel()
cv2.getGaussianKernel()
cv2.getHardwareFeatureName()
cv2.getNumberOfCPUs() # CPU数量
cv2.getNumThreads() # 线程数量
cv2.getOptimalDFTSize()
cv2.getOptimalNewCameraMatrix() # 在相机标定完后,得到新的矩阵
cv2.getPerspectiveTransform()
cv2.getRectSubPix()
cv2.getRotationMatrix2D()
cv2.getStructuringElement() # 获取结构元素。用于构建形态学操作的核
cv2.getTextSize() # 获取文本大小
cv2.getThreadNum()
cv2.getTickCount() # 获取CPU时间
cv2.getTickFrequency()
cv2.getTrackbarPos()
cv2.getValidDisparityROI()
cv2.getVersionMajor()
cv2.getVersionMinor()
cv2.getVersionRevision()
cv2.getVersionString()
cv2.getWindowImageRect()
cv2.getWindowProperty()
cv2.goodFeaturesToTrack() # 检测视频中的角点
cv2.grabCut() # GrabCut提取前景
cv2.groupRectangles()
cv2.GaussianBlur() # Gauss模糊
cv2.GeneralizedHough # 类
cv2.GeneralizedHoughBallard # 类
cv2.GeneralizedHoughGuil # 类
cv2.GFTTDetector # 类
cv2.GFTTDetector_create()cv2.haarcascades()
cv2.hconcat()
cv2.HOGDescriptor_getDaimlerPeopleDetector()
cv2.HOGDescriptor_getDefaultPeopleDetector()
cv2.HoughCircles() # Hough圆检测
cv2.HoughLines() # Hough直线检测,极坐标
cv2.HoughLinesP() # Hough检测直线的起点、终点
cv2.HoughLinesPointSet()
cv2.HuMoments() # Hu矩
cv2.HISTCMP_BHATTACHARYYA() # todocv2.isContourConvex # 轮廓是否是凸的
cv2.idct
cv2.idft
cv2.illuminationChange
cv2.imdecode
cv2.imencode
cv2.importlib
cv2.imread # 读图片或视频一帧
cv2.imreadmulti
cv2.imshow # 显示图片
cv2.imwrite # 把图片保存到外部文件
cv2.inpaint
cv2.inRange
cv2.INTERSECT_PARTIAL #todocv2.kmeans()
cv2.KalmanFilter() #todocv2.line() # 画直线
cv2.linearPolar()
cv2.log()
cv2.logPolar()
cv2.Laplacian() # Laplacian边缘提取算子
cv2.LDR_SIZE()
cv2.LineSegmentDetector # 类
cv2.LUT #todocv2.magnitude()
cv2.matchShapes() # 形状匹配
cv2.matchTemplate() # 图片模板匹配
cv2.matMulDeriv()
cv2.max()
cv2.mean() # 一个图像的均值
cv2.meanShift()
cv2.meanStdDev() # 一个图像的均值、标准差
cv2.medianBlur() # 图像中值模糊
cv2.merge() # 合并颜色通道
cv2.min()
cv2.minAreaRect() # 图像的最小外接矩形
cv2.minEnclosingCircle() # 图像最小外接圆
cv2.minEnclosingTriangle()
cv2.minMaxLoc() # 获取图片中最小、最大值的坐标。一般用在图片模板匹配中。
cv2.mixChannels()
cv2.ml #ml包
cv2.ml_ANN_MLP() # 类
cv2.ml_Boost()
cv2.ml_DTrees()
cv2.ml_EM()
cv2.ml_KNearest()
cv2.ml_LogisticRegression()
cv2.ml_NormalBayesClassifier()
cv2.ml_ParamGrid()
cv2.ml_RTrees()
cv2.ml_StatModel()
cv2.ml_SVM()
cv2.ml_SVMSGD()
cv2.ml_TrainData()
cv2.moments() # 图像矩
cv2.morphologyEx() # 二值图像的形态学操作。例如开操作、闭操作、顶帽、黑帽、内梯度、外梯度。# 开操作可以:1)提取水平或竖直线。2)移除细的干扰直线或干扰块
cv2.moveWindow()
cv2.mulSpectrums()
cv2.multiply() # 两个图像相乘
cv2.mulTransposed()
cv2.Mahalanobis() # todocv2.namedWindow()
cv2.norm() # 向量或句矩阵的范数
cv2.normalize() # 正则化
cv2.NORM_HAMMING() # todocv2.os()
cv2.ocl()
cv2.ocl_Device()
cv2.OPTFLOW_FARNEBACK_GAUSSIAN
cv2.OPTFLOW_LK_GET_MIN_EIGENVALS
cv2.OPTFLOW_USE_INITIAL_FLOW
cv2.ORB # 类。ORB特征,比SIFT、SUFRF快
cv2.ORB_create()
cv2.ORB_FAST_SCORE
cv2.ORB_HARRIS_SCOREcv2.patchNaNs()
cv2.pencilSketch()
cv2.perspectiveTransform()
cv2.phase()
cv2.phaseCorrelate()
cv2.pointPolygonTest() # 点到轮廓距离
cv2.polarToCart()
cv2.polylines() # 画多边形
cv2.pow()
cv2.preCornerDetect()
cv2.projectPoints()
cv2.putText()
cv2.pyrDown() # 图像金字塔下采样
cv2.pyrMeanShiftFiltering() # 均值迁移滤波。一种高斯双边滤波,保留图像的边缘,边缘保留滤波,油画效果,用于美颜,滤镜
cv2.pyrUp() # 图像金字塔上采样
cv2.PARAM_ALGORITHM() # todo
cv2.QRCodeDetector() # todocv2.randn()
cv2.randShuffle()
cv2.randu()
cv2.readOpticalFlow()
cv2.recoverPose()
cv2.rectangle() # 画矩形
cv2.rectify3Collinear()
cv2.redirectError()
cv2.reduce()
cv2.remap() # 在相机标定完后,将原图映射到新图
cv2.repeat()
cv2.reprojectImageTo3D()
cv2.resize()
cv2.resizeWindow()
cv2.rotate()
cv2.rotatedRectangleIntersection()
cv2.RANSAC() #todo
cv2.Rodrigues # 把旋转矩阵变成旋转向量,或把旋转向量变成旋转矩阵
cv2.RQDecomp3x3 # 计算3*3矩阵的RQ分解cv2.samples()
cv2.sampsonDistance()
cv2.scaleAdd()
cv2.seamlessClone()
cv2.selectROI()
cv2.selectROIs()
cv2.sepFilter2D()
cv2.setIdentity()
cv2.setMouseCallback()
cv2.setNumThreads()
cv2.setRNGSeed()
cv2.setTrackbarMax()
cv2.setTrackbarMin()
cv2.setTrackbarPos()
cv2.setUseOpenVX()
cv2.setUseOptimized()
cv2.setWindowProperty()
cv2.setWindowTitle()
cv2.solve()
cv2.solveCubic()
cv2.solveLP()
cv2.solveP3P()
cv2.solvePnP() #从3与2D的对应关系中,发现物体的姿态
cv2.solvePnPGeneric()
cv2.solvePnPRansac() #用RANSAC算法从3与2D的对应关系中,发现物体的姿态
cv2.solvePnPRefineLM()
cv2.solvePnPRefineVVS()
cv2.solvePoly()
cv2.sort()
cv2.sortIdx()
cv2.spatialGradient()
cv2.split() #分隔颜色通道成BGR
cv2.sqrBoxFilter()
cv2.sqrt() #开方
cv2.startWindowThread()
cv2.stereoCalibrate()
cv2.stereoCalibrateExtended()
cv2.stereoRectify()
cv2.stereoRectifyUncalibrated()
cv2.stylization()
cv2.subtract() #两个图像相减
cv2.sumElems()
cv2.Scharr() #Scharr边缘提取算子,是Sobel算子的增强算法
cv2.StereoBM #类,用块对应算法计算双目立体匹配
cv2.StereoSGBM #类,用半全局块对应算法计算双目立体匹配
cv2.SimpleBlobDetector #类
cv2.SimpleBlobDetector_create()
cv2.SimpleBlobDetector_Params #类
cv2.Sobel() #Sobel边缘提取算子
cv2.SparseOpticalFlow #类
cv2.SparsePyrLKOpticalFlow #类
cv2.SparsePyrLKOpticalFlow_create
cv2.StereoBM_create()
cv2.StereoMatcher #类
cv2.Stitcher #类
cv2.Stitcher_create()
cv2.Subdiv2D #类
cv2.SVBackSubst()
cv2.SVDecomp() #SVD分解
#todocv2.textureFlattening()
cv2.threshold() #图像整体二值化
cv2.trace()
cv2.transform() #变换
cv2.transpose() #转置
cv2.triangulatePoints() #用三角化重建点
cv2.TERM_CRITERIA_COUNT() #todo
cv2.TickMeter #类
cv2.Tonemap #类
cv2.TonemapDrago #类
cv2.TonemapMantiuk #类
cv2.TonemapReinhard #类cv2.undistort() #在相机标定完后,直接得到去畸变的图像
cv2.undistortPoints()
cv2.undistortPointsIter()
cv2.useOpenVX()
cv2.useOptimized()
cv2.utils()#todo
cv2.UMat() #类
cv2.UMAT_AUTO_STEP
cv2.UMat_AUTO_STEP
cv2.UMat_context
cv2.UMAT_CONTINUOUS_FLAG
cv2.UMat_CONTINUOUS_FLAG
cv2.UMAT_DATA_ASYNC_CLEANUP
cv2.UMAT_DATA_COPY_ON_MAP
cv2.UMAT_DATA_DEVICE_COPY_OBSOLETE
cv2.UMAT_DATA_DEVICE_MEM_MAPPED
cv2.UMAT_DATA_HOST_COPY_OBSOLETE
cv2.UMAT_DATA_TEMP_COPIED_UMAT
cv2.UMAT_DATA_TEMP_UMAT
cv2.UMAT_DATA_USER_ALLOCATED
cv2.UMAT_DEPTH_MASK #todo
cv2.UMAT_TYPE_MASK
cv2.UMatData_ASYNC_CLEANUP
cv2.USAGE_ALLOCATE_HOST_MEMORY
#todocv2.validateDisparity()
cv2.vconcat()
cv2.videoio_registry()
cv2.VariationalRefinement()
cv2.VariationalRefinement_create()
cv2.VideoCapture() #打开摄像头或视频文件的类
cv2.VideoCapture.get
cv2.VideoCapture.getBackendName
cv2.VideoCapture.getExceptionMode
cv2.VideoCapture.grab
cv2.VideoCapture.isOpened
cv2.VideoCapture.mro
cv2.VideoCapture.open
cv2.VideoCapture.read() #读取视频中的一帧图片
cv2.VideoCapture.release
cv2.VideoCapture.retrieve
cv2.VideoCapture.set
cv2.VideoCapture.setExceptionModecv2.VideoWriter() #写视频类
cv2.VideoWriter_fourcc()
cv2.VIDEOWRITER_PROP_FRAMEBYTES
cv2.VIDEOWRITER_PROP_NSTRIPES
cv2.VIDEOWRITER_PROP_QUALITYcv2.waitKey()
cv2.waitKeyEx()
cv2.warpAffine() #仿射变换
cv2.warpPerspective() #投影变换
cv2.warpPolar()
cv2.watershed() # 分水岭算法
cv2.writeOpticalFlow()#todo
cv2.WARP_FILL_OUTLIERS()
cv2.WARP_INVERSE_MAP
cv2.WARP_POLAR_LINEAR
cv2.WARP_POLAR_LOG
cv2.WarperCreator()
cv2.WINDOW_AUTOSIZE
cv2.WINDOW_FREERATIO
cv2.WINDOW_FULLSCREEN
cv2.WINDOW_GUI_EXPANDED
cv2.WINDOW_GUI_NORMAL
cv2.WINDOW_KEEPRATIO
cv2.WINDOW_FULLSCREEN
cv2.WND_PROP_OPENGL
cv2.WND_PROP_TOPMOST
cv2.WND_PROP_VISIBLE相关文章:

OpenCV 相机相关函数
一、变换参数矩阵的求解 1. 计算三个二维点对之间的仿射变换矩阵:getAffineTransform() 2. 计算多个二维点对之间的最优放射变换矩阵(误差最小准则):estimateRigidTransform();或者findHomography(); 3. 计算四个二维点对之间的…...
微信小程序之投票管理
前言 对于会议管理模块,必不可少的当然就是我们的投票管理,实现真正意义上的无纸化办公,本期博客为大家介绍会议管理模块,包括发布投票及查看各类投票的状态 所用技术点 MyBatis、SpringMVC、VentUI MyBatis和SpringMVC在博客主…...

23种设计模式【创建型模式】详细介绍之【建造者模式】
建造者模式:构建复杂对象的精妙设计 设计模式的分类和应用场景总结建造者模式:构建复杂对象的精妙设计建造者模式的核心思想建造者模式的参与者Java示例:建造者模式 设计模式的分类和应用场景总结 可以查看专栏设计模式:设计模式 …...

[量化投资-学习笔记002]Python+TDengine从零开始搭建量化分析平台-MA均线的多种实现方式
MA 均线时最基本的技术指标,也是最简单,最不常用的(通常使用EMA、SMA)。 以下用两种不同的计算方法和两种不同的画图方法进行展示和说明。 MA 均线指标公式 MA (N)(C1 C2 C3 …C N )/N目录 方式一1.SQL 直接查询均值2.使用 pyp…...

c语言 判断两个文件是否相同
使用strcmp比较: #include <stdio.h> #include <string.h>int Compare(const char * file1, const char* file2) {FILE* f1, * f2;int size1, size2;unsigned char buffer1[1024], buffer2[1024];f1 fopen(file1, "rb");f2 fopen(file2, &…...
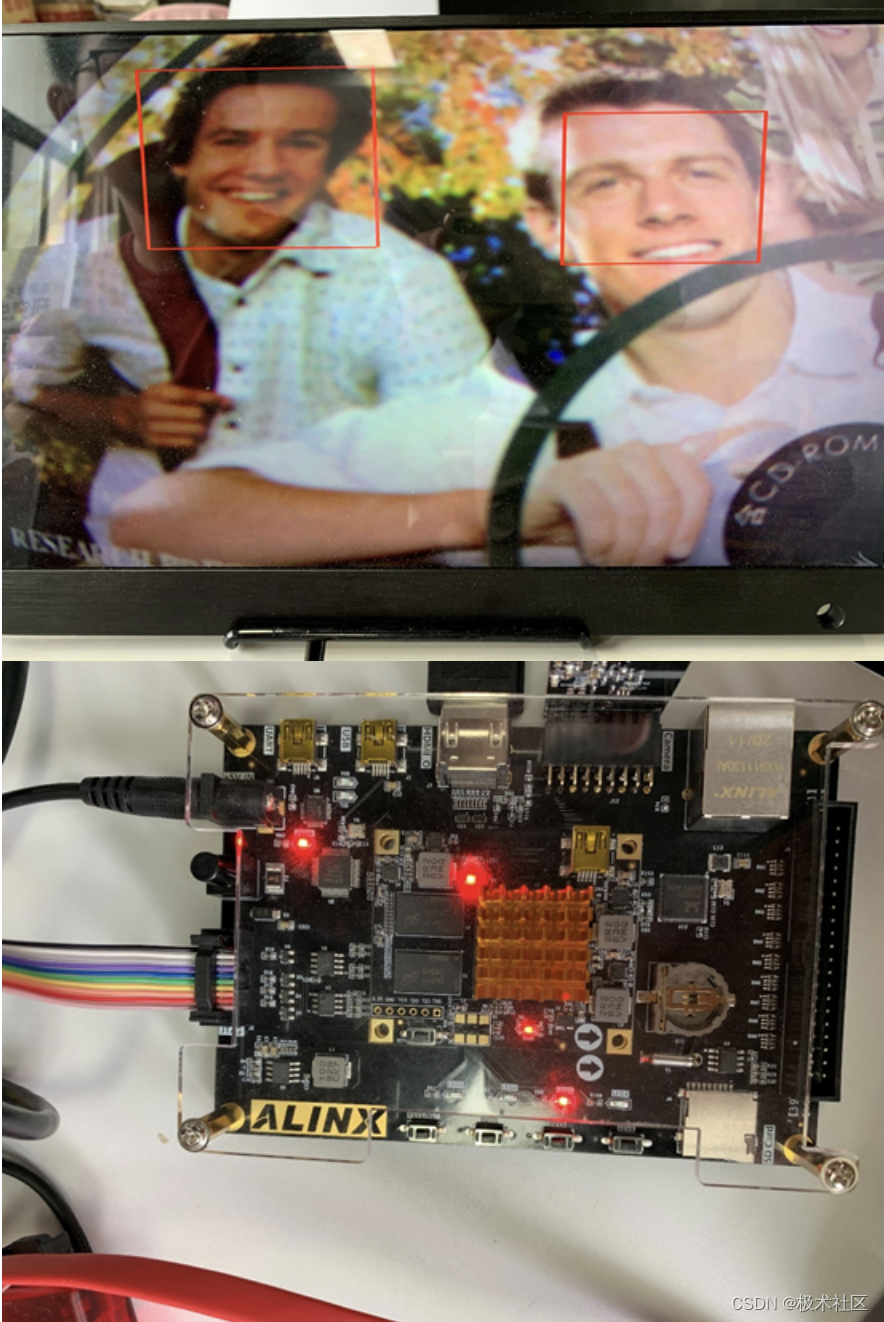
【2021集创赛】Arm杯三等奖:基于FPGA的人脸检测SoC设计
本作品参与极术社区组织的有奖征集|秀出你的集创赛作品风采,免费电子产品等你拿~活动。 团队介绍 参赛单位:合肥工业大学 队伍名称:芯创之家 指导老师:邓红辉、尹勇生 参赛杯赛:Arm杯 参赛人员:王亮 李嘉燊 金京 获奖情…...

Java电商平台 - API 接口设计之 token、timestamp、sign 具体架构与实现|电商API接口接入
一:token 简介 Token:访问令牌access token, 用于接口中, 用于标识接口调用者的身份、凭证,减少用户名和密码的传输次数。一般情况下客户端(接口调用方)需要先向服务器端申请一个接口调用的账号,服务器会给出一个appId和一个key, …...
【带头学C++】----- 1.基础知识 ---- 1.23 运算符概述
1.23 运算符概述 运算符,在数学中常见的加减乘除之类的符号,那么在C在编程语言中呢,将使用特定的符号或标记对操作数进行操作以生成结果。用算术运算符将运算对象(也称操作数)连接起来的、符合C 语法规则的式子,称为C 算术表达式运…...
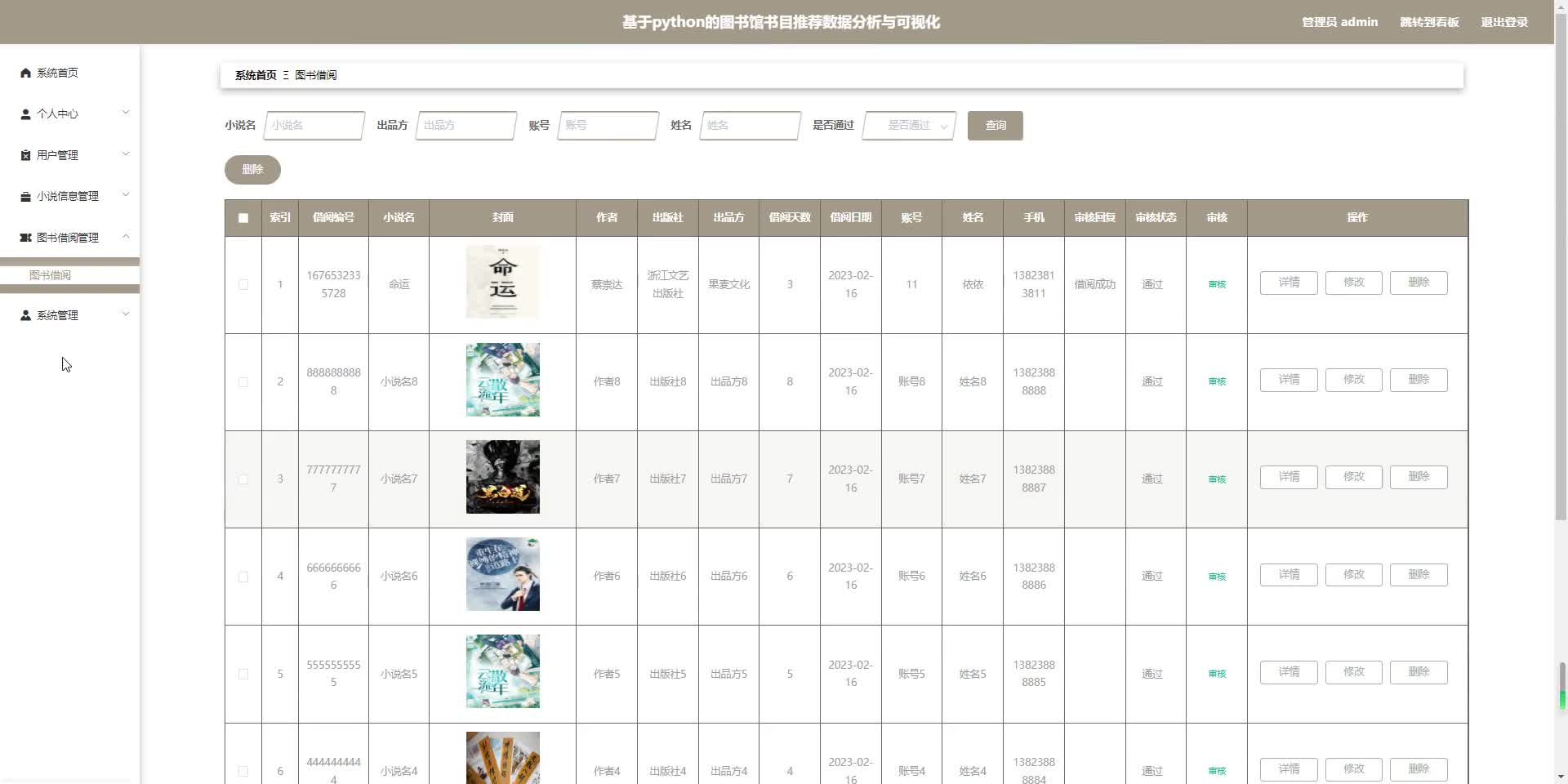
python爬虫分析基于python图书馆书目推荐数据分析与可视化
收藏关注不迷路 文章目录 前言一、项目介绍二、开发环境三、功能介绍四、核心代码五、效果图六、文章目录 前言 随着电子技术的普及和快速发展,线上管理系统被广泛的使用,有很多商业机构都在实现电子信息化管理,图书推荐也不例外,…...

Java零基础入门-关系运算符
前言 Java作为一门广受欢迎的开发语言,其在企业级应用和移动应用开发中有着广泛的应用。如果你是一个Java零基础的初学者,那么你来到了一个正确的地方。在本篇文章中,我们会详细介绍Java中的关系运算符,帮助你快速入门。 摘要 …...
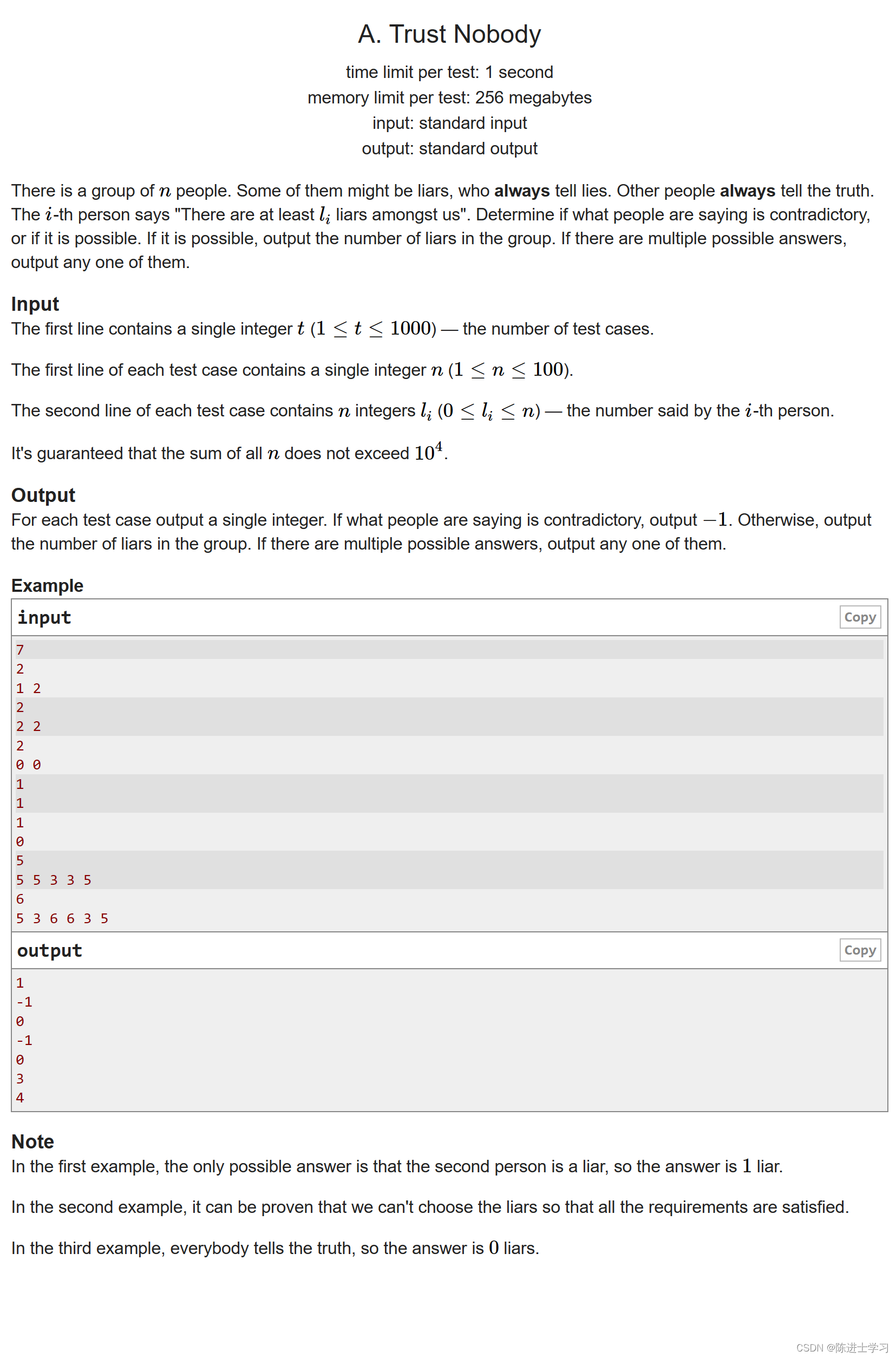
1200*A. Trust Nobody(贪心)
Problem - 1826A - Codeforces 解析: 从大到小枚举说谎人的个数x,然后查看是否有 x个人说谎即可。 #include<bits/stdc.h> using namespace std; #define int long long const int N2e55; int t,n,a[N]; signed main(){scanf("%lld",&a…...

二维码智慧门牌管理系统升级解决方案:采集项目的建立与运用
文章目录 前言一、采集项目的建立二、采集项目的运用三、采集项目的意义 前言 在二维码智慧门牌管理系统的升级过程中,一个至关重要的环节是采集项目的建立与运用。采集项目是新建采集任务的前提,同时也是整个系统升级的关键步骤。其意义近似于现实中的…...
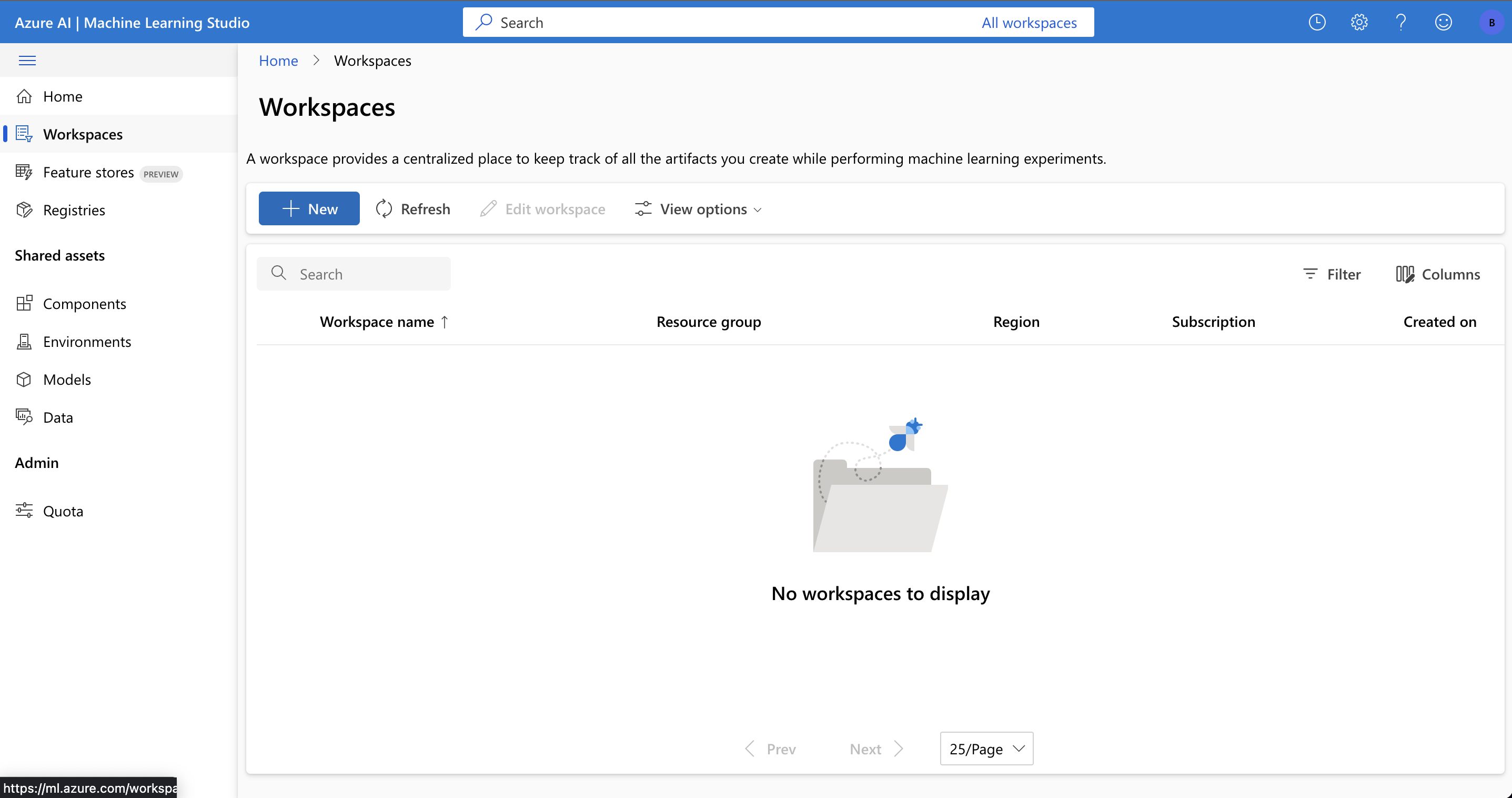
Azure - 机器学习:创建机器学习所需资源,配置工作区
目录 一、Azure机器学习工作区与计算实例简要介绍工作区计算实例 二、创建工作区1. 登录到 Azure 机器学习工作室2. 选择“创建工作区”3. 提供以下信息来配置新工作区:4. 选择“创建”以创建工作区 三、创建计算实例四、工作室实战4.1 工作室快速导览4.2 从示例笔记…...
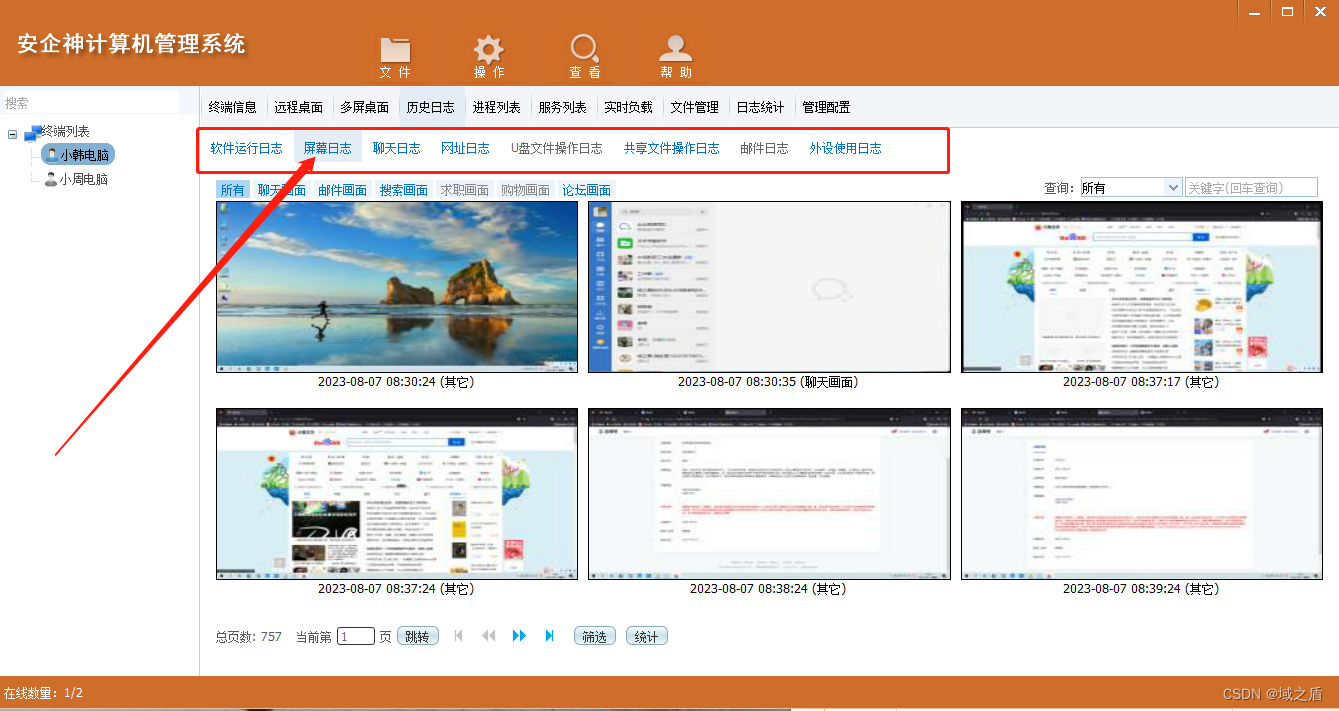
电脑监控软件哪些比较好用
电脑监控软件在当今信息化时代越来越受到人们的关注,它们可以用于保护公司的商业机密,防止员工在工作中做一些不恰当的事情,以及在家庭中监控孩子的上网行为等。 本文将介绍一些比较好用的电脑监控软件: 一、域之盾软件 这款软件…...
)
数据结构与算法之排序: 选择排序 (Javascript版)
排序 排序:把某个乱序的数组变成升序或降序的数组 (这里用数组来做举例) 选择排序 该排序属于 贪心 策略关注的是局部,是一种苟且的东西 算法实现 // 随机数组,选择排序 Array.prototype.selectionSort function() {let len this.leng…...

【前端】NodeJS核心知识点整理
1.Node.js入门案例 1.1.什么是Node.js JS是脚本语言,脚本语言都需要一个解析器才能运行。对于写在HTML页面里的JS,浏览器充当了解析器的角色。而对于需要独立运行的JS,NodeJS就是一个解析器。 每一种解析器都是一个运行环境,不但…...

计算机操作系统重点概念整理-第三章 进程同步【期末复习|考研复习】
第三章 进程同步 【期末复习|考研复习】 计算机操作系统系列文章传送门: 第一章 计算机系统概述 第二章 进程管理 第三章 进程同步 第四章 内存管理 第五章 文件管理 第六章 输出输出I/O管理 文章目录 第三章 进程同步 【期末复习|考研复习】前言三、进程同步3.1 临…...

day06-Flex布局
Flex布局 目标:熟练使用 Flex 完成结构化布局 01-标准流 标准流也叫文档流,指的是标签在页面中默认的排布规则,例如:块元素独占一行,行内元素可以一行显示多个。 02-浮动 基本使用 作用:让块元素水平排…...

架构整洁之道摘录
软件架构 软件架构规则和其他变量完全⽆关。 软件设计的终极⽬标是⽤最⼩的成本来满⾜构建和维护系统的需求。 程序设计重要的是软件架构的灵活性⽽不是先实现功能。 软件系统的第⼀价值体系是系统⾏为,第⼆价值体系是系统架构 编程范式 结构化编程 利⽤if/else…...
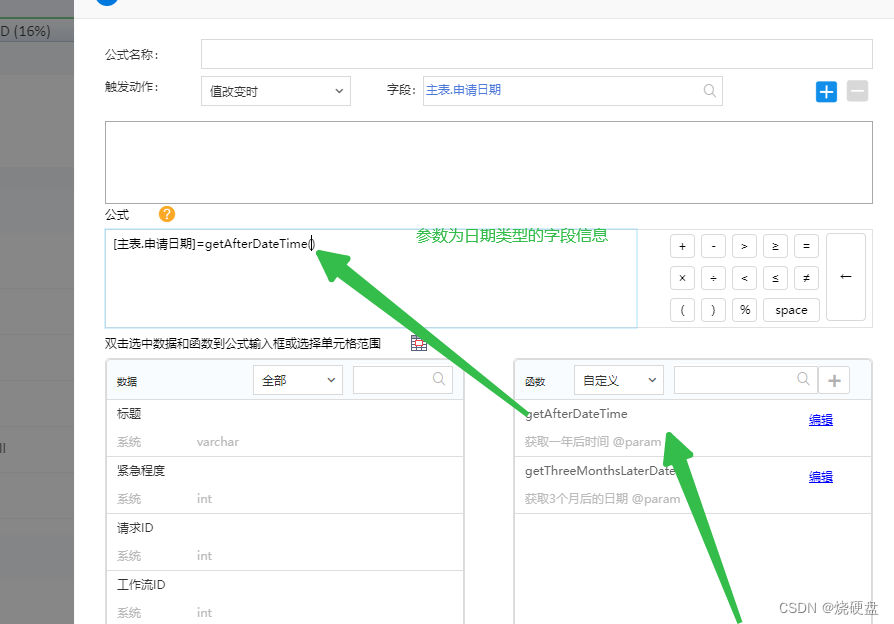
流程引擎-自定义函数的应用
背景: 某些业务需求比较特殊,需要在表单中校验或实现一些功能,泛微流程表单配置时实现的方式多种多样:JS脚本、SQL语句、公式以及其他一些标准化拖拽功能,本次给大家分享一下流程表单中的公式实现的一些需求场景。泛微…...

UE4动画蓝图实战:用双骨骼IK节点搞定手部穿模,附完整蓝图节点截图
UE4动画蓝图实战:双骨骼IK节点解决手部穿模的完整指南在角色动画开发中,手部穿模问题堪称"视觉杀手"。想象一下精心设计的角色挥拳时,拳头直接穿过墙壁或敌人身体——这种违和感足以毁掉整个场景的沉浸感。本文将彻底解决这个痛点&…...

ARM指令追踪技术及TRCVICTLR寄存器详解
1. ARM指令追踪技术概述在嵌入式系统开发和调试过程中,指令追踪(Instruction Trace)是一项至关重要的技术。它通过硬件机制记录处理器的执行流程,为开发者提供程序运行的完整轨迹。ARM架构从v7开始引入嵌入式跟踪宏单元࿰…...

ESP32多任务水位监测:从Arduino到ESP-IDF的FreeRTOS实战
1. 项目概述:从Arduino到ESP-IDF的跃迁去年我在做毕业设计时,为了搭建一个ESP32的传感器节点演示程序,第一次深入使用了FreeRTOS。那段时间,我几乎天天和任务调度、队列、信号量打交道,从最初的一头雾水到后来能流畅地…...

FT231XQ USB串口桥接板设计解析与实战应用指南
1. 项目概述:从FT232R到FT231XQ的USB串口桥接板演进在嵌入式开发和硬件调试的日常工作中,一个可靠、小巧且功能清晰的USB转串口(UART)桥接板(Breakout Board, 简称BoB)几乎是工程师手边的标配工…...

2026长沙智能家居品牌实测,这些本地老牌值得选
2026年,长沙的智能家居市场已经从“概念热”转向“落地战”。我走访了长沙多个本地服务商,实测了不同品牌在别墅、酒店、大平层等场景的真实表现。今天,结合数据与案例,分享几个值得关注的本地品牌,尤其是深耕8年以上的…...

为什么鸿蒙 App 最终都会走向状态驱动?
子玥酱 (掘金 / 知乎 / CSDN / 简书 同名) 大家好,我是 子玥酱,一名长期深耕在一线的前端程序媛 👩💻。曾就职于多家知名互联网大厂,目前在某国企负责前端软件研发相关工作,主要聚…...

1688运营培训/询盘成本从500元降到63.9!1688运营培训还原1688真实玩法
1688运营培训/询盘成本从500元降到63.9!1688运营培训还原1688真实玩法500块钱一个询盘,你敢信?做1688运营培训这么多年,这个数字我都觉得离谱。前阵子遇到一个老板,一上来就开始吐槽1688,说1688就是个垃圾平…...

NanaZip:现代Windows文件压缩问题的终极解决方案
NanaZip:现代Windows文件压缩问题的终极解决方案 【免费下载链接】NanaZip The 7-Zip derivative intended for the modern Windows experience 项目地址: https://gitcode.com/gh_mirrors/na/NanaZip 还在为Windows文件压缩工具界面老旧、功能单一而烦恼吗&…...

Redis 客户端连接详解
Redis 客户端连接详解 引言 Redis 是一款高性能的内存数据结构存储系统,常用于缓存、会话管理、实时排行榜等功能。客户端连接是 Redis 生态系统中的重要组成部分,本文将详细介绍 Redis 客户端连接的相关知识,包括连接方式、连接配置、连接管理等方面。 Redis 客户端连接…...

Cesium动态数据可视化实战:CallbackProperty结合setInterval打造实时运动轨迹
Cesium动态数据可视化实战:CallbackProperty结合setInterval打造实时运动轨迹 在三维地理信息系统中,实时数据可视化一直是开发者面临的挑战之一。想象一下,当我们需要在地球表面追踪一架正在飞行的无人机,或者监控城市中数百辆出…...