竞赛 深度学习卫星遥感图像检测与识别 -opencv python 目标检测
文章目录
- 0 前言
- 1 课题背景
- 2 实现效果
- 3 Yolov5算法
- 4 数据处理和训练
- 5 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 **深度学习卫星遥感图像检测与识别 **
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题背景
近年来,世界各国大力发展航空航天事业,卫星图像的目标检测在各行各业的应用得到了快速的发展,特别是军事侦查、海洋船舶和渔业管理等领域。由于卫星图像中有价值的信息极少,卫星图像数据规模巨大,这迫切需要智能辅助工具帮助相关从业人员从卫星图像中高效获取精确直观的信息。
本文利用深度学习技术,基于Yolov5算法框架实现卫星图像目标检测问题。
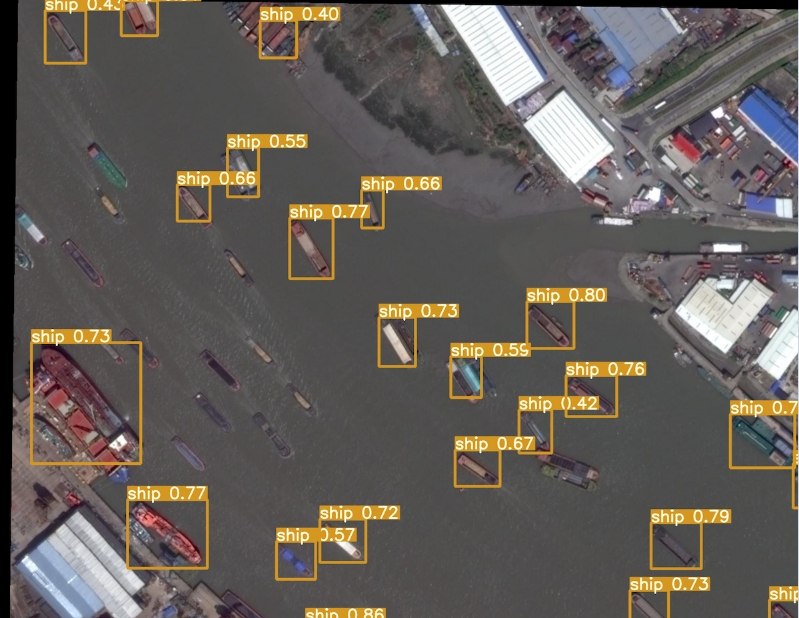
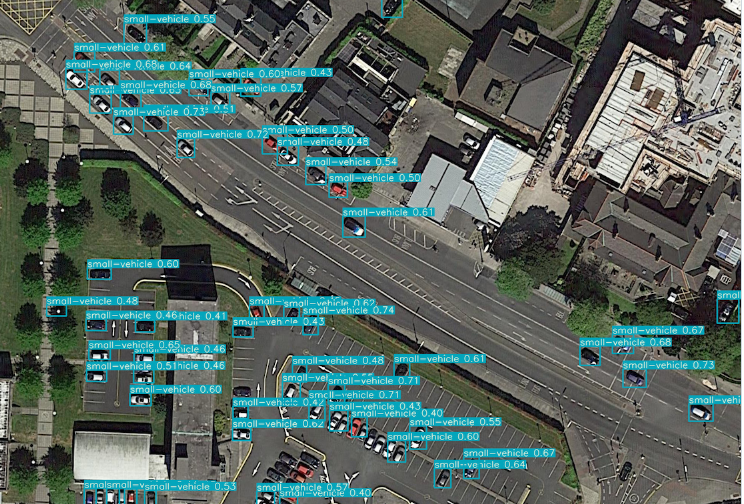
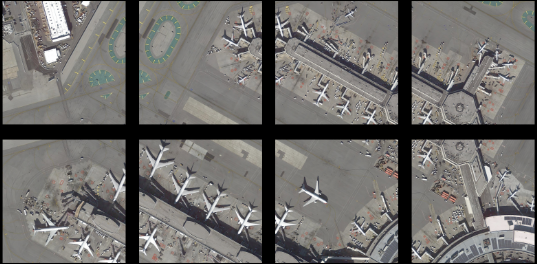
2 实现效果
实现效果如下:可以看出对船只、飞机等识别效果还是很好的。


3 Yolov5算法
简介
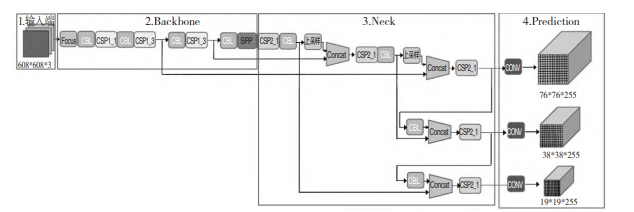
下图所示为 YOLOv5 的网络结构图,分为输入端,Backbone,Neck 和 Prediction 四个部分。其中,
输入端包括 Mosaic 数据增强、自适应图片缩放、自适应锚框计算,Backbone 包括 Focus 结构、CSP
结 构,Neck 包 括 FPN+PAN 结 构,Prediction 包 括GIOU_Loss 结构。
相关代码
class Yolo(object):def __init__(self, weights_file, verbose=True):self.verbose = verbose# detection paramsself.S = 7 # cell sizeself.B = 2 # boxes_per_cellself.classes = ["aeroplane", "bicycle", "bird", "boat", "bottle","bus", "car", "cat", "chair", "cow", "diningtable","dog", "horse", "motorbike", "person", "pottedplant","sheep", "sofa", "train","tvmonitor"]self.C = len(self.classes) # number of classes# offset for box center (top left point of each cell)self.x_offset = np.transpose(np.reshape(np.array([np.arange(self.S)]*self.S*self.B),[self.B, self.S, self.S]), [1, 2, 0])self.y_offset = np.transpose(self.x_offset, [1, 0, 2])self.threshold = 0.2 # confidence scores threholdself.iou_threshold = 0.4# the maximum number of boxes to be selected by non max suppressionself.max_output_size = 10self.sess = tf.Session()self._build_net()self._build_detector()self._load_weights(weights_file)
4 数据处理和训练
数据集
本项目使用 DOTA 数据集,原数据集中待检测的目标如下
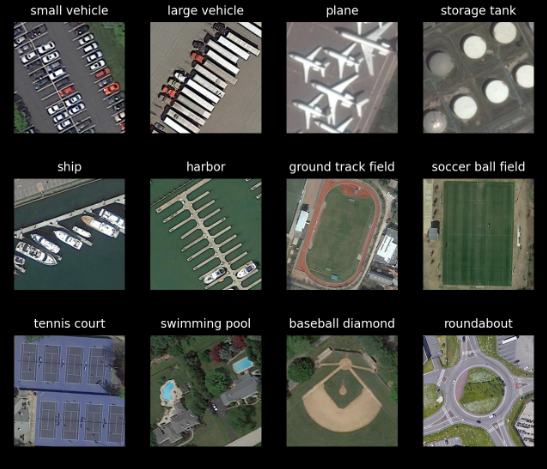
原数据集中的标签如下

图像分割和尺寸调整
YOLO 模型的图像输入尺寸是固定的,由于原数据集中的图像尺寸不一,我们将原数据集中的图像按目标分布的位置分割成一个个包含目标的子图,并将每个子图尺寸调整为
1024×1024。分割前后的图像如所示。
分割前

分割后
模型训练
在 yolov5/ 目录,运行 train.py 文件开始训练:
python train.py --weight weights/yolov5s.pt --batch 16 --epochs 100 --cache
其中的参数说明:
- weight:使用的预训练权重,这里示范使用的是 yolov5s 模型的预训练权重
- batch:mini-batch 的大小,这里使用 16
- epochs:训练的迭代次数,这里我们训练 100 个 epoch
- cache:使用数据缓存,加速训练进程
相关代码
#部分代码
def train(hyp, opt, device, tb_writer=None):logger.info(f'Hyperparameters {hyp}')log_dir = Path(tb_writer.log_dir) if tb_writer else Path(opt.logdir) / 'evolve' # logging directorywdir = log_dir / 'weights' # weights directoryos.makedirs(wdir, exist_ok=True)last = wdir / 'last.pt'best = wdir / 'best.pt'results_file = str(log_dir / 'results.txt')epochs, batch_size, total_batch_size, weights, rank = \opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank# Save run settingswith open(log_dir / 'hyp.yaml', 'w') as f:yaml.dump(hyp, f, sort_keys=False)with open(log_dir / 'opt.yaml', 'w') as f:yaml.dump(vars(opt), f, sort_keys=False)# Configurecuda = device.type != 'cpu'init_seeds(2 + rank)with open(opt.data) as f:data_dict = yaml.load(f, Loader=yaml.FullLoader) # data dictwith torch_distributed_zero_first(rank):check_dataset(data_dict) # checktrain_path = data_dict['train']test_path = data_dict['val']nc, names = (1, ['item']) if opt.single_cls else (int(data_dict['nc']), data_dict['names']) # number classes, namesassert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check# Modelpretrained = weights.endswith('.pt')if pretrained:with torch_distributed_zero_first(rank):attempt_download(weights) # download if not found locallyckpt = torch.load(weights, map_location=device) # load checkpointif 'anchors' in hyp and hyp['anchors']:ckpt['model'].yaml['anchors'] = round(hyp['anchors']) # force autoanchormodel = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc).to(device) # createexclude = ['anchor'] if opt.cfg else [] # exclude keysstate_dict = ckpt['model'].float().state_dict() # to FP32state_dict = intersect_dicts(state_dict, model.state_dict(), exclude=exclude) # intersectmodel.load_state_dict(state_dict, strict=False) # loadlogger.info('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # reportelse:model = Model(opt.cfg, ch=3, nc=nc).to(device) # create# Freezefreeze = ['', ] # parameter names to freeze (full or partial)if any(freeze):for k, v in model.named_parameters():if any(x in k for x in freeze):print('freezing %s' % k)v.requires_grad = False# Optimizernbs = 64 # nominal batch sizeaccumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizinghyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decaypg0, pg1, pg2 = [], [], [] # optimizer parameter groupsfor k, v in model.named_parameters():v.requires_grad = Trueif '.bias' in k:pg2.append(v) # biaseselif '.weight' in k and '.bn' not in k:pg1.append(v) # apply weight decayelse:pg0.append(v) # all else
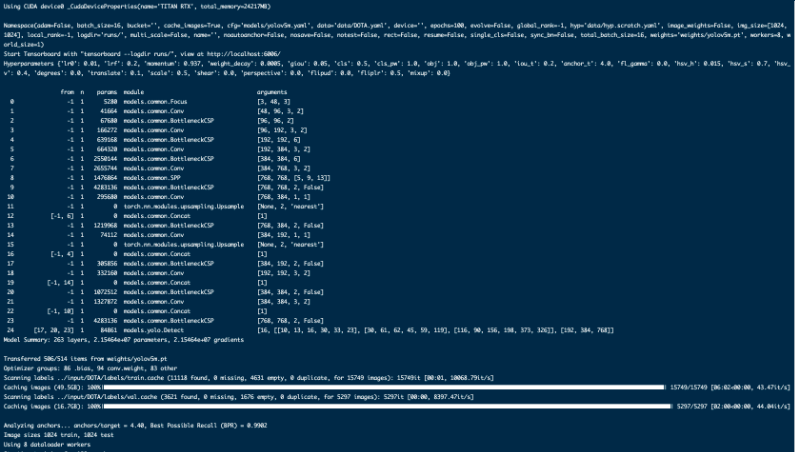
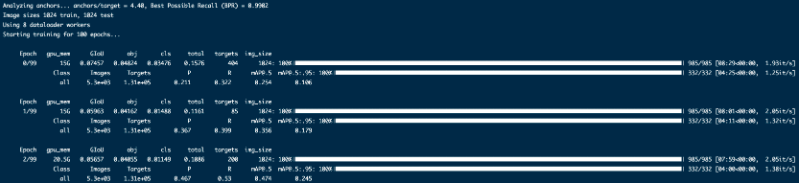
训练开始时的日志信息
5 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
竞赛 深度学习卫星遥感图像检测与识别 -opencv python 目标检测
文章目录 0 前言1 课题背景2 实现效果3 Yolov5算法4 数据处理和训练5 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **深度学习卫星遥感图像检测与识别 ** 该项目较为新颖,适合作为竞赛课题方向,学长非常推荐…...

对Happens-Before的理解
Happens-Before Happens-Before 是一种可见性模型,也就是说,在多线程环境下。原本因为指令重排序的存在会导致数据的可见性问题,也就是 A 线程修改某个共享变量对 B 线程不可见。因此,JMM 通过 Happens-Before 关系向开发人员提供…...

分类预测 | MATLAB实现SSA-CNN-BiGRU麻雀算法优化卷积双向门控循环单元数据分类预测
分类预测 | MATLAB实现SSA-CNN-BiGRU麻雀算法优化卷积双向门控循环单元数据分类预测 目录 分类预测 | MATLAB实现SSA-CNN-BiGRU麻雀算法优化卷积双向门控循环单元数据分类预测分类效果基本描述程序设计参考资料 分类效果 基本描述 1.MATLAB实现SSA-CNN-BiGRU麻雀算法优化卷积双…...
Java面试八股文之暑假合集
八股文暑假合集 基础篇二分查找 java基础篇7月12号面向对象和面向过程的区别重载和重写String 7月13号自动装箱和拆箱静态方法构造方法成员变量和局部变量对象引用和对象实例返回值 与equals(重要)hashcode()和equals()HashMap 7月16号线程,进程和程序final关键字的…...
竞赛选题 深度学习卫星遥感图像检测与识别 -opencv python 目标检测
文章目录 0 前言1 课题背景2 实现效果3 Yolov5算法4 数据处理和训练5 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **深度学习卫星遥感图像检测与识别 ** 该项目较为新颖,适合作为竞赛课题方向,学长非常推荐…...
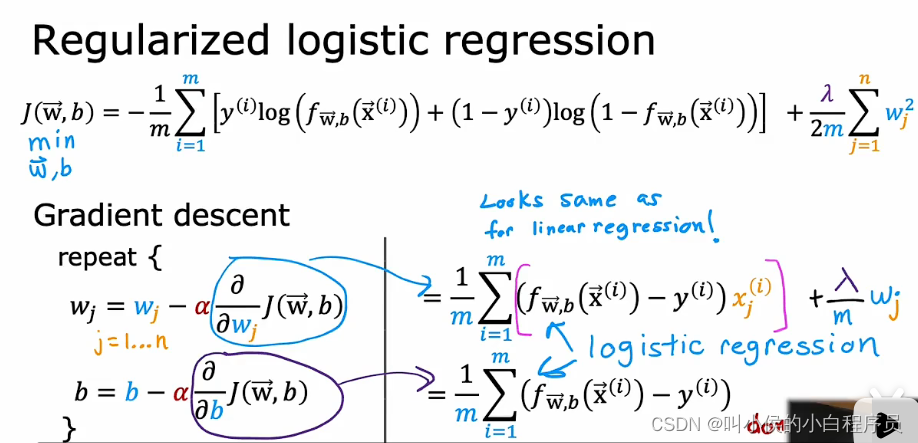
机器学习第一周
一、概述 机器学习大致会被划分为两类:监督学习,无监督学习 1.1 监督学习 监督学习其实就是,给计算机一些输入x和正确的输出y(训练数据集),让他总结x->y的映射关系,从而给他其他的输入x&a…...
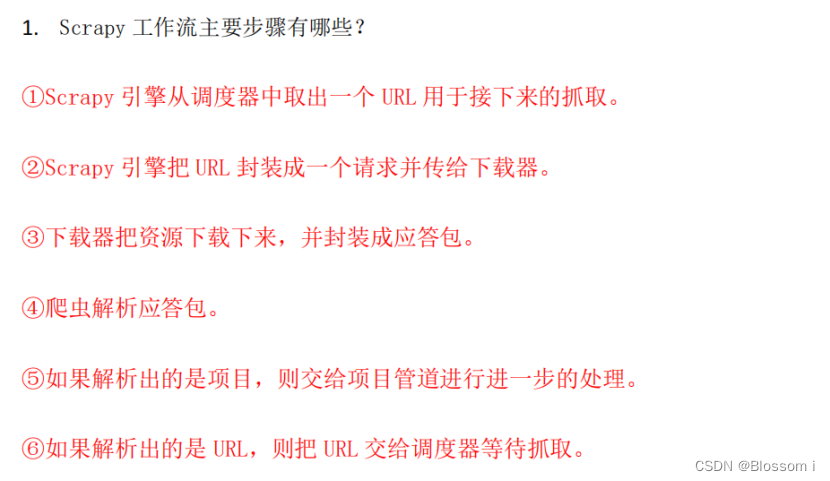
大数据采集技术与预处理学习一:大数据概念、数据预处理、网络数据采集
目录 大数据概念: 1.数据采集过程中会采集哪些类型的数据? 2.非结构化数据采集的特点是什么? 3.请阐述传统的数据采集与大数据采集的区别? 4.大数据采集的数据源有哪些?针对不同的数…...

MySQL - 为什么索引结构默认使用B+树,而不是其他?
B-Tree的缺点: 范围查询效率相对较低:虽然B-Tree支持范围查询,但在实际操作中可能需要进行多次树遍历,性能较差。磁盘空间利用不高:B-Tree中的非叶子节点也存储数据,导致磁盘空间利用率相对较低。更复杂的平…...
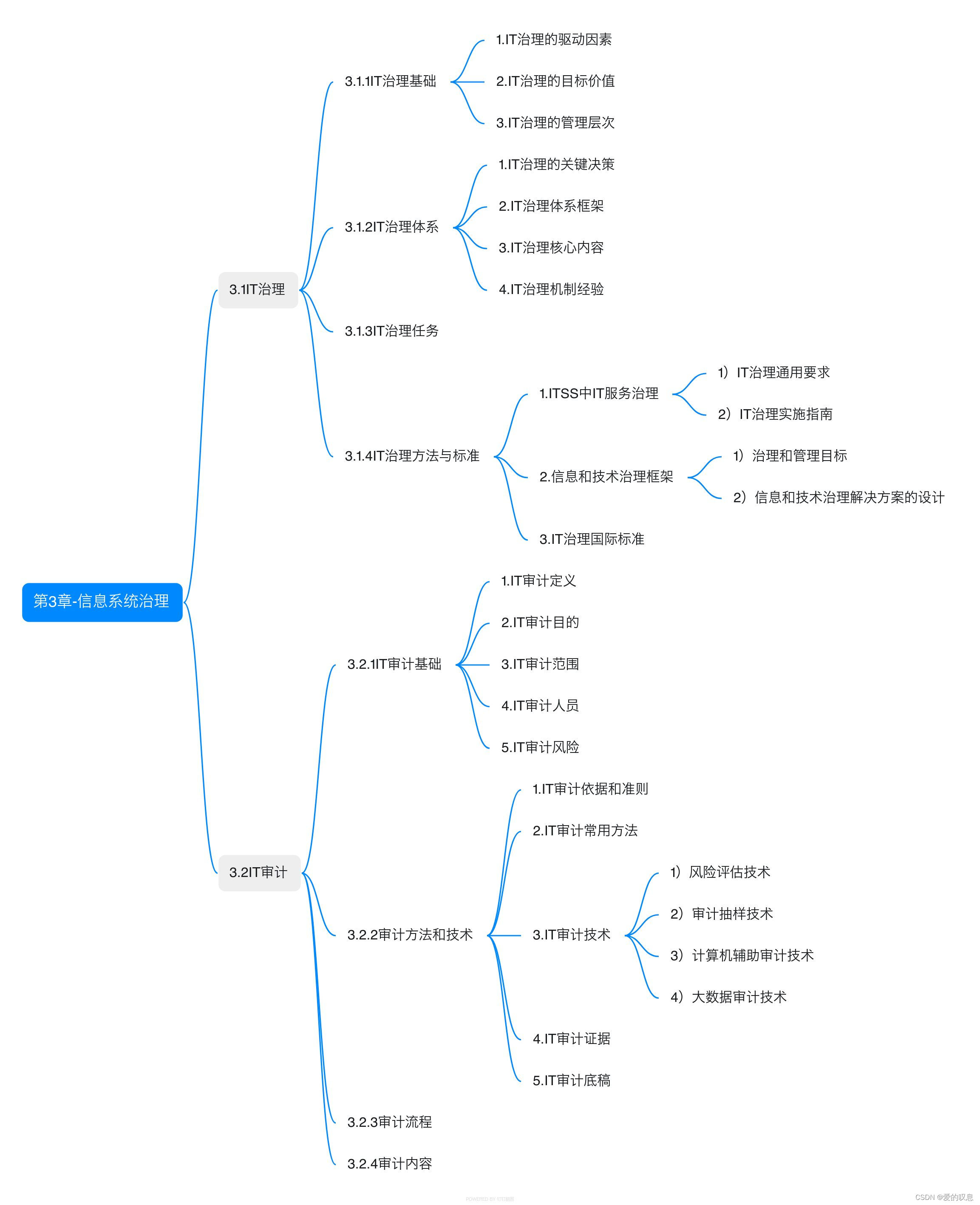
信息系统项目管理师教程 第四版【第3章-信息系统治理-思维导图】
信息系统项目管理师教程 第四版【第3章-信息系统治理-思维导图】...

2023.NET技术沙龙知识学习笔记
目录 一.Bootstrap Blazor UI组件库企业级应用介绍1.Blazor是什么2.为什么要用Blazor3.Bootstrap Blazor是什么 二.使用WebAssembly运行、扩展.NET应用程序1.WebAssembly简介2.WebAssembly的起源3.为什么选择二进制格式?4.WebAssembly与传统JavaScript的对比5.执行速…...
Golang教程——配置环境,再探GoLand
文章目录 一、Go是什么?二、环境配置验证配置环境变量 三、安装开发者工具GoLand四、HelloGolang 一、Go是什么? Go(也称为Golang)是一种开源的编程语言,由Google开发并于2009年首次发布。Go语言旨在提供一种简单、高…...

C++之lambda匿名、using、typedef总结【全】(二百四十九)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 人生格言: 人生…...
基于SpringBoot的个人博客系统
基于SpringBootVue的个人博客系统的设计与实现~ 开发语言:Java数据库:MySQL技术:SpringBootMyBatisVue工具:IDEA/Ecilpse、Navicat、Maven 系统展示 主页 系统公告 博客详情 后台发文 摘要 基于Spring Boot的个人博客系统是一种…...

javascript中的继承
基本术语 本文中,proto [[Prototype]] 原型链 基本思想: 构造函数生成的对象有一个指针(proto)指向构造函数的原型。如果将构造函数1的原型指向另一个构造函数2的实例,则构造函数1的实例__proto__.proto 指向了构…...

智能问答技术在百度搜索中的应用
作者 | Xiaodong 导读 本文主要介绍了智能问答技术在百度搜索中的应用。包括机器问答的发展历程、生成式问答、百度搜索智能问答应用。欢迎大家加入百度搜索团队,共同探索智能问答技术的发展方向,文末有简历投递方式。 全文6474字,预计阅读时…...
STM32F4X SDIO(一) SD卡介绍
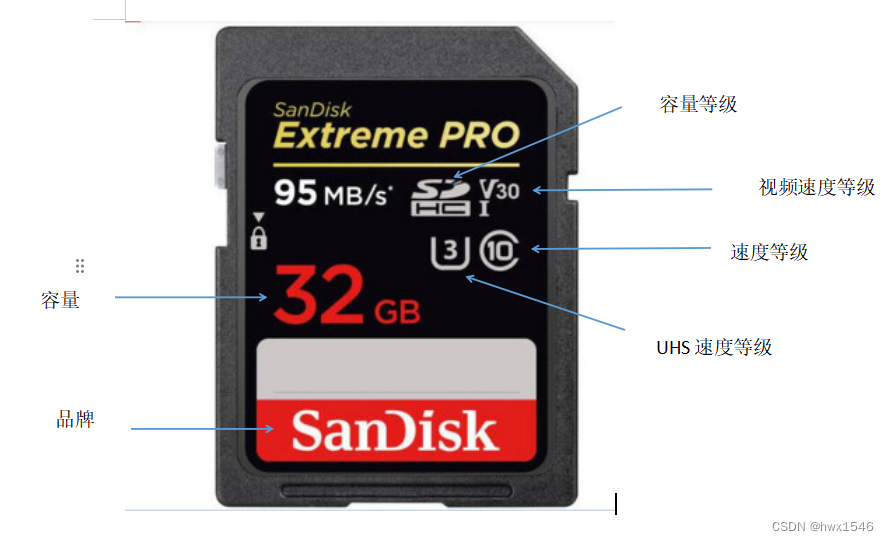
STM32F4X SDIO(一) SD卡介绍 SD卡分类外观分类容量分类传输速度分类 在之前的章节中,讲过有关嵌入式的存储设备,有用I2C驱动的EEPROM、SPI驱动的FLASH和MCU内部的FLASH,这类存储设备的优点是操作简单,但是缺…...
10分钟了解JWT令牌 (JSON Web)
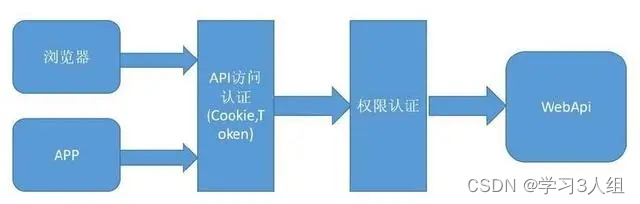
10分钟了解JSON Web令牌(JWT) JSON Web Token(JWT)是目前最流行的跨域身份验证解决方案。今天给大家介绍JWT的原理和用法。 1.跨域身份验证 Internet服务无法与用户身份验证分开。一般过程如下。 1.用户向服务器发送用户名和密码。…...

【经验总结】ECU系统休眠后通过诊断报文唤醒ECU且唤醒网络后快发NM报文
目录 前言 正文 1.CanNM状体机分析 2.ComM状态机分析 3.解决方案 4.总结 前言...

基于Android 10系统的ROC-RK3399-PC Pro源码编译
基于Android 10系统的ROC-RK3399-PC Pro源码编译 一、开发环境搭建二、下载Android 10 SDK三、编译Android 10 SDK ROC-RK3399-PC Pro资料下载处:https://www.t-firefly.com/doc/download/145.html一、开发环境搭建 Android 10 SDK的编译对PC机的要求不低ÿ…...

网络滤波器/网络滤波器/脉冲变压器要怎样进行测试,一般要测试哪些参数?
Hqst华强盛导读:网络滤波器/网络滤波器/脉冲变压器要怎样进行测试,一般要测试哪些参数?测试网络滤波器的测试方法和步骤如何,需用到哪些测试工具和仪器设备呢? 一,网络流量的监控和过滤能力测试&am…...

从账单明细看 Taotoken 按 Token 计费如何实现成本精细化
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 从账单明细看 Taotoken 按 Token 计费如何实现成本精细化 1. 引言:从模糊估量到精确计量 在接入和使用大模型 API 时&…...

【AI面试八股文 Vol.3.5:推理幻觉规模定律】CoT、幻觉与 Scaling Law:为什么模型会推理,也会一本正经胡说
摘要:这篇会把 CoT、幻觉和 Scaling Law 放到同一条工程主线上:CoT 不是教模型思考,而是触发模型把隐式路径显式写出来;幻觉不是单一 bug,而是训练知识边界、解码策略和指令跟随压力叠加后的结果;Scaling L…...

工业视觉开发的基石:GenICam 简介
在工业自动化和机器视觉领域,“碎片化”曾是开发者面临的最大痛点。不同品牌的相机使用不同的通信协议、参数定义和 SDK。为了获取一张图像或调节曝光时间,开发者往往需要学习多个厂商的驱动接口。而 GenICam (Generic Interface for Cameras) 标准的出现…...

别再复制粘贴了!手把手带你用DEFINE_PROFILE宏实现一个正弦变化入口速度
从零实现Fluent正弦速度入口:DEFINE_PROFILE宏实战指南 在计算流体力学(CFD)仿真中,标准边界条件设置往往无法满足复杂工况需求。想象这样一个场景:你需要模拟风力发电机叶片在阵风条件下的受力情况,入口风速并非恒定值࿰…...

边缘AI落地实战:模型轻量化、硬件加速与端侧部署全链路解析
1. 项目概述:为什么“把AI带到边缘设备”不是一句口号,而是正在发生的产业迁移 “Bringing AI To Edge Devices”——这个标题乍看像科技发布会的PPT副标题,但在我过去十年跑遍深圳华强北模组厂、杭州海康产线、苏州工业视觉集成商和北京智能…...

如何快速入门Play框架:5分钟搭建你的第一个Java Web应用
如何快速入门Play框架:5分钟搭建你的第一个Java Web应用 【免费下载链接】play1 Play framework 项目地址: https://gitcode.com/gh_mirrors/pl/play1 Play框架是一个轻量级的Java Web开发框架,它采用了MVC架构模式,提供了快速开发、热…...

2026年企业直播平台怎么选?选型清单与避坑指南
选企业直播平台,99%的企业会踩这5个坑:首年低价续费涨价、CDN质量差导致直播卡顿、功能演示≠实际能力、售后响应慢、数据安全隐患。 本文整理了企业直播平台选型7维度、5大常见坑、5个典型场景的建议,以及一份可直接使用的选型检查清单。 …...

Infineon C167芯片Flash编程与MEMTOOL使用指南
1. C167系列芯片片上Flash编程方法解析在嵌入式系统开发中,片上Flash编程是每个工程师都需要掌握的核心技能。对于使用Infineon C167系列微控制器的开发者来说,了解如何可靠地编程片上Flash存储器尤为重要。本文将详细介绍使用MEMTOOL工具进行C167芯片Fl…...

MobileSAM深度解析:轻量化图像分割架构揭秘与实战应用
MobileSAM深度解析:轻量化图像分割架构揭秘与实战应用 【免费下载链接】MobileSAM This is the official code for MobileSAM project that makes SAM lightweight for mobile applications and beyond! 项目地址: https://gitcode.com/gh_mirrors/mo/MobileSAM …...
- 5月22日-第二题- 建筑物的安全视野】(题目+思路+JavaC++Python解析+在线测试))
【2026年华为暑期实习-非AI方向(通软嵌软测试算法数据科学)- 5月22日-第二题- 建筑物的安全视野】(题目+思路+JavaC++Python解析+在线测试)
题目内容 在城市规划中,建筑师需要分析建筑物之间的视野关系。给出一条街道上的一排建筑物,每个建筑物有一定的高度。对于每个建筑物,我们定义一个安全视野距离:从该建筑物向右看,能看到的建筑物的数量。 一个建筑物 AAA 能够看到另一个建筑物 BBB 的条件是: BB...