kinect v2获取人体骨骼数据
#include <iostream>
#include <string>
#include <WS2tcpip.h>
#pragma comment (lib, "ws2_32.lib")
#include <chrono>
#include <opencv2/opencv.hpp>
#include <opencv2/core.hpp> // 核心功能,包括矩阵和数组操作
#include <opencv2/imgproc.hpp> // 图像处理功能
#include <opencv2/highgui.hpp> // 图形用户界面相关功能,用于显示图像和交互
#include <opencv2/video.hpp> // 视频处理功能
#include <Kinect.h>
#include <fstream>
#include<chrono>
#include<thread>using namespace cv;void DrawLine(cv::Mat& Img, const Joint& r1, const Joint& r2, ICoordinateMapper* pMapper)
{if (r1.TrackingState == TrackingState_Tracked && r2.TrackingState == TrackingState_Tracked){ColorSpacePoint p1, p2;pMapper->MapCameraPointToColorSpace(r1.Position, &p1);pMapper->MapCameraPointToColorSpace(r2.Position, &p2);line(Img, Point(p1.X, p1.Y), Point(p2.X, p2.Y), Vec3b(0, 0, 255), 5);circle(Img, Point(p1.X, p1.Y), 10, (0, 0, 255), -1);circle(Img, Point(p2.X, p2.Y), 10, (0, 0, 255), -1);}
}int main()
{IKinectSensor* pSensor = nullptr;GetDefaultKinectSensor(&pSensor); pSensor->Open(); IColorFrameSource* pFrameSource = nullptr;pSensor->get_ColorFrameSource(&pFrameSource);int iWidth = 0, iHeight = 0;IFrameDescription* pFrameDescription = nullptr;pFrameSource->get_FrameDescription(&pFrameDescription);pFrameDescription->get_Width(&iWidth);pFrameDescription->get_Height(&iHeight);IColorFrameReader* pColorFrameReader = nullptr;pFrameSource->OpenReader(&pColorFrameReader);pFrameDescription->Release();pFrameDescription = nullptr;pFrameSource->Release();pFrameSource = nullptr;UINT uBufferSize = 0;cv::Mat mColorImg(iHeight, iWidth, CV_8UC4);uBufferSize = iHeight * iWidth * 4 * sizeof(BYTE);IBodyFrameReader* pBodyFrameReader = nullptr;IBody** aBodyData = nullptr;INT32 iBodyCount = 0;IBodyFrameSource* pBodySource = nullptr;pSensor->get_BodyFrameSource(&pBodySource);pBodySource->get_BodyCount(&iBodyCount);aBodyData = new IBody*[iBodyCount];for (int i = 0; i < iBodyCount; ++i)aBodyData[i] = nullptr; pBodySource->OpenReader(&pBodyFrameReader);pBodySource->Release();pBodySource = nullptr;ICoordinateMapper* pCoordinateMapper = nullptr;pSensor->get_CoordinateMapper(&pCoordinateMapper);cv::namedWindow("Body Image", cv::WINDOW_NORMAL);cv::resizeWindow("Body Image", 560, 360); while (true){IColorFrame* pColorFrame = nullptr;if (pColorFrameReader->AcquireLatestFrame(&pColorFrame) == S_OK){pColorFrame->CopyConvertedFrameDataToArray(uBufferSize, mColorImg.data, ColorImageFormat_Bgra);pColorFrame->Release();}cv::Mat mImg = mColorImg.clone();IBodyFrame* pBodyFrame = nullptr;if (pBodyFrameReader->AcquireLatestFrame(&pBodyFrame) == S_OK){// std::cout << "读取人体帧数据成功" << std::endl;if (pBodyFrame->GetAndRefreshBodyData(iBodyCount, aBodyData) == S_OK){// std::cout << "获取骨骼帧中的骨骼数据成功" << std::endl;for (int i = 0; i < iBodyCount; ++i){IBody* pBody = aBodyData[i];BOOLEAN bTracked = false;if ((pBody->get_IsTracked(&bTracked) == S_OK) && bTracked){// std::cout << "骨骼已被跟踪" << std::endl;// std::cout << "跟踪序号:" << i << std::endl;Joint aJoints[JointType_Count];if (pBody->GetJoints(JointType_Count, aJoints) == S_OK){//脊柱DrawLine(mImg, aJoints[JointType_SpineBase], aJoints[JointType_SpineMid], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_SpineMid], aJoints[JointType_SpineShoulder], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_SpineShoulder], aJoints[JointType_Neck], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_Neck], aJoints[JointType_Head], pCoordinateMapper);//左 armDrawLine(mImg, aJoints[JointType_SpineShoulder], aJoints[JointType_ShoulderLeft], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_ShoulderLeft], aJoints[JointType_ElbowLeft], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_ElbowLeft], aJoints[JointType_WristLeft], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_WristLeft], aJoints[JointType_HandLeft], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_HandLeft], aJoints[JointType_HandTipLeft], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_WristLeft], aJoints[JointType_ThumbLeft], pCoordinateMapper);//右armDrawLine(mImg, aJoints[JointType_SpineShoulder], aJoints[JointType_ShoulderRight], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_ShoulderRight], aJoints[JointType_ElbowRight], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_ElbowRight], aJoints[JointType_WristRight], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_WristRight], aJoints[JointType_HandRight], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_HandRight], aJoints[JointType_HandTipRight], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_WristRight], aJoints[JointType_ThumbRight], pCoordinateMapper);//左legDrawLine(mImg, aJoints[JointType_SpineBase], aJoints[JointType_HipLeft], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_HipLeft], aJoints[JointType_KneeLeft], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_KneeLeft], aJoints[JointType_AnkleLeft], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_AnkleLeft], aJoints[JointType_FootLeft], pCoordinateMapper);//右legDrawLine(mImg, aJoints[JointType_SpineBase], aJoints[JointType_HipRight], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_HipRight], aJoints[JointType_KneeRight], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_KneeRight], aJoints[JointType_AnkleRight], pCoordinateMapper);DrawLine(mImg, aJoints[JointType_AnkleRight], aJoints[JointType_FootRight], pCoordinateMapper);// *************************保存TXT数据*************************//创建一个名为"data.txt"的文本文件,并清空其中的内容std::ofstream outfile("data_test139.txt", std::ios::trunc);for (int s = 0; s < JointType_Count; s++){outfile << aJoints[s].Position.X << "\t" << aJoints[s].Position.Y << "\t" << aJoints[s].Position.Z << std::endl;}outfile << std::endl;std::cout << "骨骼关节点数据写入成功" << std::endl;}}//追踪失败else {if (pBody->get_IsTracked(&bTracked) != S_OK) {std::cerr << "骨骼追踪失败,Failed to read body tracking state. Error code: " << pBody->get_IsTracked(&bTracked) << std::endl;}//未被追踪else if (!bTracked){std::cerr << "骨骼未被追踪,Body is not being tracked." << std::endl;}}}}else{std::cerr << "Can't read body data" << std::endl;}pBodyFrame->Release();}cv::imshow("Body Image", mImg);if (cv::waitKey(5) == VK_ESCAPE){break;}}pSensor->Close();pSensor->Release();pSensor = nullptr;return 0;
}相关文章:

kinect v2获取人体骨骼数据
#include <iostream> #include <string> #include <WS2tcpip.h> #pragma comment (lib, "ws2_32.lib") #include <chrono> #include <opencv2/opencv.hpp> #include <opencv2/core.hpp> // 核心功能,包括矩阵…...

JDK、JRE及JVM的关系及作用
1、JDK JDK(Java Development Kit)是java程序的开发工具集,包含了运行环境JRE、开发工具及基础类库等。 注意: 生产环境,目前使用JDK同时作为开发和运行环境的比较多,主要是为了排查问题方便的同时不用切…...

组学数据上传(六)|GEO数据库数据上传实操
最近有些老师反馈文章发表时要求提供GEO登录号,如:GSEXXXX,问要怎么获取这种登录号?这时就需要把数据上传至GEO数据库了。还在等什么,跟着小编了解下GEO数据库,手把手教您上传数据至GEO数据库。 GEO数据库全称GENE EXPRESSION OMNIBUS&…...

洛谷,Hydro,Vijos,博客园,GitHub 分别是什么?
洛谷(luogu.com.cn)是一个在线的算法竞赛平台,提供了大量的算法题目,可以进行刷题、比赛、交流等。Hydro 是一个开源的在线评测系统,用于处理洛谷和其他OJ平台的算法评测。Vijos(vijos.org)是另…...
自学VUE笔记
一、基础语法学习 1、Attribute 绑定 a、绑定单个属性:给这个div 增加id 属性 <div v-bind:id"dynamicId"></div>简写: <div :id"dynamicId"></div> b、绑定多个属性值 data() {return {objectOf…...
系列四十二、Spring的事务传播行为案例演示(二)#REQUIRED
一、演示Spring的默认传播行为(REQUIRED) 1.1、运行之前表中的数据 1.2、StockServiceImpl /*** Author : 一叶浮萍归大海* Date: 2023/10/30 15:43* Description:*/ Service(value "stockServiceREQUIRED") public class StockServiceImpl…...

oracle rac-归档满处理
有客户反馈数据库无法使用了,客户手动启动报错如下 SQL> startup; ORACLE instance started. Total System Global Area 2.6924E10 bytes Fixed Size 2265984 bytes Variable Size 1.3959E10 bytes Database Buffers 1.2952E10 bytes R…...
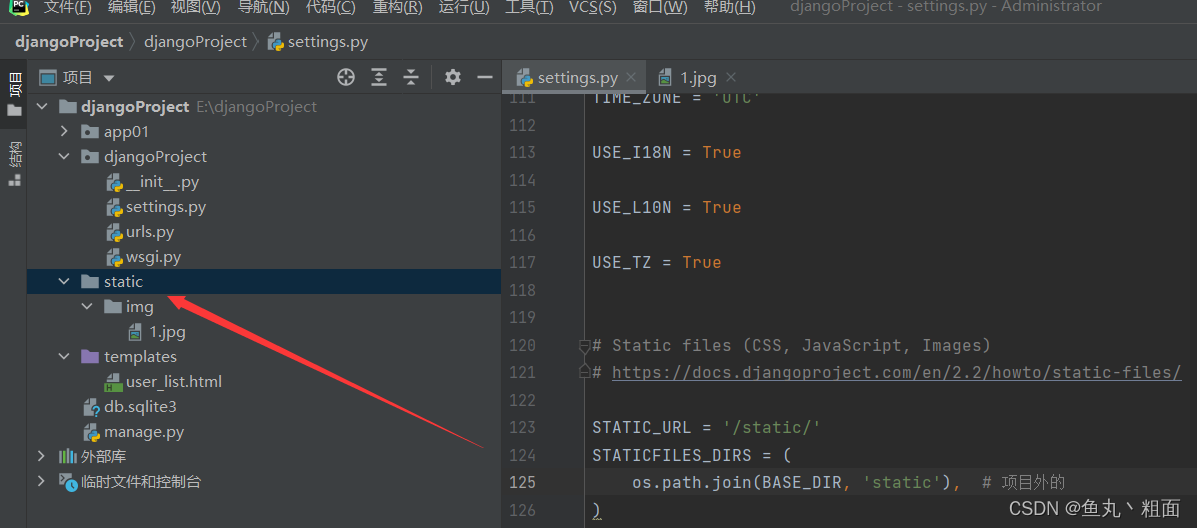
Python Django 之全局配置 settings 详解
文章目录 1 概述1.1 Django 目录结构 2 常用配置:settings.py2.1 注册 APP:INSTALLED_APPS2.2 模板路径:TEMPLATES2.3 静态文件:STATICFILES_DIRS2.4 数据库:DATABASES2.5 允许访问的主机:ALLOWED_HOSTS 1 …...

挑选MES系统供应商,需要考虑哪些重要因素?
挑选MES系统供应商时,需要考虑下述几个重要因素: 1.功能与特性:MES系统的功能和特性尤为重要。切实保障挑选的服务商可以满足企业的实际需求,包含生产计划管理、物料追踪、质量管理、机器设备等多个方面的功能。 2.系统可扩展性&a…...

Ai创作系统ChatGPT网站源码+图文搭建教程+支持GPT4.0+支持ai绘画(Midjourney)
一、AI创作系统 SparkAi创作系统是基于OpenAI很火的ChatGPT进行开发的Ai智能问答系统AI绘画系统,支持OpenAI GPT全模型国内AI全模型。本期针对源码系统整体测试下来非常完美,可以说SparkAi是目前国内一款的ChatGPT对接OpenAI软件系统。那么如何搭建部署…...
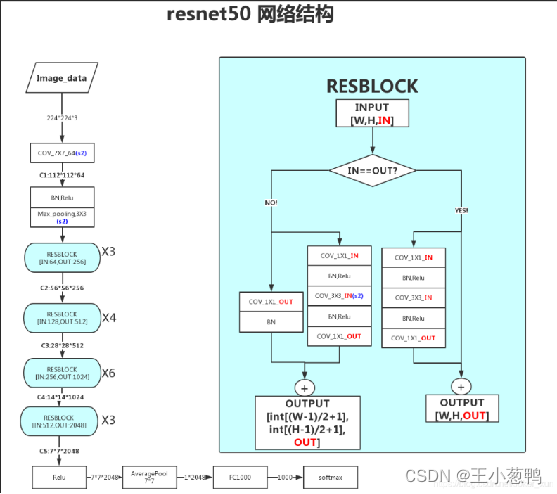
基于计算机视觉的坑洼道路检测和识别-MathorCup A(深度学习版本)
1 2023 年 MathorCup 高校数学建模挑战赛——大数据竞赛 赛道 A:基于计算机视觉的坑洼道路检测和识别 使用深度学习模型,pytorch版本进行图像训练和预测,使用ResNet50模型 2 文件夹预处理 因为给定的是所有图片都在一个文件夹里面…...
)
【考研数学】概率论与数理统计 —— 第七章 | 参数估计(1,基本概念及点估计法)
文章目录 引言一、参数估计的概念二、参数的点估计2.1 矩估计法2.2 最大似然估计法 写在最后 引言 我们之前学了那么多分布,如正态分布 N ( μ , σ 2 ) N(\mu,\sigma^2) N(μ,σ2),泊松分布 P ( λ ) P(\lambda) P(λ) 等等,都是在已知 …...

获取文本长度
使用TextView的getLineCount方法,它可以返回TextView当前显示的行数。但是,这个方法只有在TextView绘制完成后才能返回正确的值,否则可能返回0。因此,需要在TextView的post方法中调用,或者在onWindowFocusChanged方法中…...
python html(文件/url/html字符串)转pdf
安装库 pip install pdfkit第二步 下载程序wkhtmltopdf https://wkhtmltopdf.org/downloads.html 下载7z压缩包 解压即可, 无需安装 解压后结构应该是这样, 我喜欢放在项目里, 相对路径引用(也可以使用绝对路径, 放其他地方) import pdfkit# 将 wkhtmltopdf.exe程序 路径 p…...

Spring概述
Spring概述 Spring 是最受欢迎的企业级 Java 应用程序开发框架,数以百万的来自世界各地的开发人员使用 Spring 框架来创建性能好、易于测试、可重用的代码。 Spring 框架是一个开源的 Java 平台,它最初是由 Rod Johnson 编写的,并且于 2003 …...

Linux网卡
网卡 网卡(Network Interface Card,NIC)是一种计算机硬件设备,也称为网络适配器或网络接口控制器。一个网卡就是一个接口 网卡组成和工作原理参考https://blog.csdn.net/tao546377318/article/details/51602298 每个网卡都拥有唯…...

【Python机器学习】零基础掌握ElasticNet变量选择回归器
如何优雅地解决房价预测问题? 房价预测一直是一个热门而复杂的话题。假设一个地产商希望准确地预测不同城市区域的房价,以便更有效地进行房地产投资。问题在于,房价是由多种因素共同决定的,例如地段、房屋面积、交通便利程度等。 为了解决这个问题,一个可行的思路是使用…...

【数据结构】模拟实现Vecotr
namespace my_vector {template <class T>class vector{public:typedef T* iterator;typedef const T* const_iterator;//常量指针,指针指向的值不可以变;//构造函数vector():start(nullptr),finish(nullptr),end_of_storage(nullptr){}//析构函数…...

Qt开发: 利用Qt的charts模块绘制曲线、饼图、柱状图、折线图等各种图表
一、前言 Qt Charts模块是Qt提供的一个用于创建各种类型图表的功能模块。为开发人员提供了一种简单而强大的方式来可视化数据。Qt Charts模块基于Qt GUI框架构建,可以与其他Qt模块无缝集成,例如Qt Widgets、Qt Quick和Qt OpenGL。 Qt Charts模块包含了几个核心类: (1)Q…...
Redis:加速你的应用响应时间,提升用户体验
绝大部分写业务的程序员,在实际开发中使用 Redis 的时候,只会 Set Value 和 Get Value 两个操作,对 Redis 整体缺乏一个认知。这里对 Redis 常见问题做一个总结,解决大家的知识盲点。 1、为什么使用 Redis 在项目中使用 Redis&am…...

3步打造你的专属游戏串流服务器:Sunshine终极指南
3步打造你的专属游戏串流服务器:Sunshine终极指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 还在为无法在客厅大电视上玩PC游戏而烦恼吗?想在平板上继…...
深度集成:让 AI 安全执行企业 API)
函数调用(Function Calling)深度集成:让 AI 安全执行企业 API
系列导读 你现在看到的是《Spring AI 企业级集成与场景实践:从零搭建智能应用》的第 5/10 篇,当前这篇会重点解决:展示如何让 AI 安全可控地操作企业后端服务,实现真正的智能体能力。 上一篇回顾:第 4 篇《检索增强生成(RAG)实战:Spring AI 集成向量数据库实现知识问…...

拒绝无效熬夜!Paperxie 本科论文智能写作,把毕业季还给你
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPThttps://www.paperxie.cn/ai/dissertationhttps://www.paperxie.cn/ai/dissertation 凌晨三点的图书馆,光标在空白文档里闪了又闪,Word 字数统计停在 478;导师的修…...

如何快速掌握AMD锐龙隐藏性能:Ryzen SDT调试工具终极指南
如何快速掌握AMD锐龙隐藏性能:Ryzen SDT调试工具终极指南 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https:/…...

Windows键盘记录器:为什么需要、它是什么、以及如何正确使用
Windows键盘记录器:为什么需要、它是什么、以及如何正确使用 【免费下载链接】keylogger Keylogger for Windows. 项目地址: https://gitcode.com/gh_mirrors/keylogg/keylogger 在当今数字化时代,键盘记录器作为系统监控和用户行为分析工具&…...

5个高效方法:如何用AKShare处理金融数据去重,避免重复数据干扰分析
5个高效方法:如何用AKShare处理金融数据去重,避免重复数据干扰分析 【免费下载链接】akshare AKShare is an elegant and simple financial data interface library for Python, built for human beings! 开源财经数据接口库 项目地址: https://gitcod…...
)
别再被防火墙挡在门外!FileZilla Server在Windows下的完整端口放行指南(含被动模式配置)
FileZilla Server在Windows环境下的防火墙配置与端口管理实战 "为什么我的FTP客户端能连接却无法列出目录?"——这是许多初次配置FileZilla Server的用户常遇到的困惑。Windows防火墙就像一位严格的保安,如果不清楚FTP协议的特殊性,…...

Get-cookies.txt-LOCALLY:浏览器Cookie本地导出终极指南
Get-cookies.txt-LOCALLY:浏览器Cookie本地导出终极指南 【免费下载链接】Get-cookies.txt-LOCALLY Get cookies.txt, NEVER send information outside. 项目地址: https://gitcode.com/gh_mirrors/ge/Get-cookies.txt-LOCALLY 在数字时代,浏览器…...

WeChatMsg:微信聊天记录本地化解析与多格式导出技术方案
WeChatMsg:微信聊天记录本地化解析与多格式导出技术方案 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/WeC…...

Gorilla:让大语言模型学会调用API,从聊天机器人到智能体的关键技术
1. 项目概述:当大语言模型学会“使用工具”如果你在过去一年里深度使用过 ChatGPT、Claude 或者国内的文心一言、通义千问这类大语言模型,你肯定有过这样的体验:模型在聊天、写作、分析上表现惊艳,但一旦你问它“帮我查一下明天的…...