GO语言,半自动打怪
仅供学习参考,切勿用于商业用途
package mainimport ("fmt""github.com/go-vgo/robotgo""math/rand""time"
)const (taskNum = 7
)type Task struct {Name stringSleepTime1 intSleepTime2 intFunc func()
}func main() {for i := 1; i <= 32; i++ {tasks := []Task{{Name: "第1图",SleepTime1: 3000,SleepTime2: 100,Func: Task1,},{Name: "第2图",SleepTime1: 1,SleepTime2: 1,Func: Task2,},{Name: "第3图",SleepTime1: 1,SleepTime2: 1,Func: Task3,},{Name: "第4图",SleepTime1: 1500,SleepTime2: 80,Func: Task4,},{Name: "第5图",SleepTime1: 1500,SleepTime2: 80,Func: Task5,},{Name: "第6图",SleepTime1: 1500,SleepTime2: 80,Func: Task6,},{Name: "第7图",SleepTime1: 1500,SleepTime2: 80,Func: Task7,},}for i := 1; i <= taskNum; i++ {task := tasks[i-1]fmt.Printf("开始执行任务:%s\n", task.Name)time.Sleep(time.Duration(task.SleepTime1) * time.Millisecond)time.Sleep(time.Duration(rand.Intn(task.SleepTime2)) * time.Millisecond)task.Func()fmt.Printf("任务%s已完成\n", task.Name)}}
}func Task1() {robotgo.MoveClick(367, 270, `left`, true)time.Sleep(2000)robotgo.KeyTap("right")robotgo.MilliSleep(10)robotgo.KeyToggle("right", "down")time.Sleep(6 * time.Second)robotgo.KeyToggle("right", "up")time.Sleep(100)fmt.Printf("第1图通关,")
}func Task2() {robotgo.KeyTap("s")time.Sleep(2 * time.Second)robotgo.KeyTap("a")robotgo.MilliSleep(20)//向下移动3秒向上移动1秒robotgo.KeyToggle("up", "down")time.Sleep(2 * time.Second)robotgo.KeyToggle("up", "up")robotgo.MilliSleep(50)robotgo.KeyTap("g")robotgo.MilliSleep(50)robotgo.KeyTap("w")time.Sleep(9 * time.Second)robotgo.KeyToggle("down", "down")time.Sleep(1 * time.Second)robotgo.KeyToggle("down", "up")robotgo.MilliSleep(50)fmt.Printf("第二图通关,")
}func Task3() {robotgo.MilliSleep(50)robotgo.KeyTap("right")robotgo.MilliSleep(10)robotgo.KeyToggle("right", "down")time.Sleep(2 * time.Second)robotgo.KeyToggle("right", "up")fmt.Printf("进入第3图")robotgo.MilliSleep(50)robotgo.KeyTap("h")time.Sleep(3 * time.Second)time.Sleep(6 * time.Second)robotgo.KeyToggle("up", "down")time.Sleep(2 * time.Second)robotgo.KeyToggle("up", "up")robotgo.MilliSleep(50)robotgo.KeyToggle("down", "down")time.Sleep(1 * time.Second)robotgo.KeyToggle("down", "up")robotgo.MilliSleep(50)robotgo.KeyToggle("right", "down")time.Sleep(2 * time.Second)robotgo.KeyToggle("right", "up")robotgo.MilliSleep(50)fmt.Printf("第3通关")}func Task4() {robotgo.KeyTap("right")robotgo.MilliSleep(50)robotgo.KeyToggle("right", "down")time.Sleep(5 * time.Second)robotgo.KeyToggle("right", "up")robotgo.MilliSleep(50)time.Sleep(20 * time.Second)robotgo.KeyToggle("right", "down")time.Sleep(2 * time.Second)robotgo.KeyToggle("right", "up")robotgo.MilliSleep(50)robotgo.KeyToggle("up", "down")time.Sleep(2 * time.Second)robotgo.KeyToggle("up", "up")robotgo.MilliSleep(50)robotgo.KeyToggle("down", "down")time.Sleep(1 * time.Second)robotgo.KeyToggle("down", "up")robotgo.MilliSleep(50)fmt.Printf("第4图通关")
}func Task5() {//向上移动1秒fmt.Print("****准备进入5图")//向上移动1秒robotgo.KeyTap("right")robotgo.MilliSleep(50)robotgo.KeyToggle("right", "down")time.Sleep(5 * time.Second)robotgo.KeyToggle("right", "up")robotgo.MilliSleep(50)time.Sleep(20 * time.Second)robotgo.KeyToggle("right", "down")time.Sleep(2 * time.Second)robotgo.KeyToggle("right", "up")robotgo.MilliSleep(50)robotgo.KeyToggle("up", "down")time.Sleep(2 * time.Second)robotgo.KeyToggle("up", "up")robotgo.MilliSleep(50)robotgo.KeyToggle("down", "down")time.Sleep(1 * time.Second)robotgo.KeyToggle("down", "up")robotgo.MilliSleep(50)fmt.Printf("第5图通关")
}func Task6() {fmt.Print("****准备进入6图")robotgo.KeyTap("right")robotgo.MilliSleep(50)robotgo.KeyToggle("right", "down")robotgo.KeyToggle("down", "down")time.Sleep(5 * time.Second)robotgo.KeyToggle("right", "up")robotgo.KeyToggle("down", "up")robotgo.MilliSleep(50)robotgo.KeyTap("w")robotgo.MilliSleep(50)robotgo.KeyTap("a")fmt.Print("****进入6图")robotgo.KeyTap("w")time.Sleep(20 * time.Second)fmt.Printf("最后通关1")robotgo.KeyTap("w")time.Sleep(30 * time.Second)fmt.Printf("最后通关2")robotgo.KeyTap("w")time.Sleep(20 * time.Second)fmt.Printf("全图通关")
}func Task7() {fmt.Printf("开始捡完物品")robotgo.KeyTap("v")time.Sleep(3 * time.Second)//修装备//time.Sleep(time.Duration(sleepTime2) * time.Millisecond)//robotgo.KeyTap("s")//time.Sleep(time.Duration(sleepTime2) * time.Millisecond)//robotgo.KeyTap("s")//time.Sleep(time.Duration(sleepTime2) * time.Millisecond)//robotgo.KeyTap("enter")//time.Sleep(1 * time.Second)//捡东西time.Sleep(3 * time.Second)fmt.Printf("第一个图捡完物品")robotgo.MilliSleep(2000)robotgo.MoveClick(10, 10, `left`, true)robotgo.MilliSleep(50)robotgo.MoveClick(10, 10, `left`, true)time.Sleep(2 * time.Second)robotgo.KeyTap("enter")time.Sleep(2 * time.Second)robotgo.KeyTap("shift")robotgo.MilliSleep(50)robotgo.KeyTap("/")robotgo.MilliSleep(50)robotgo.KeyTap("/")robotgo.MilliSleep(50)robotgo.KeyTap("shift")robotgo.MilliSleep(50)robotgo.KeyTap("y")robotgo.MilliSleep(50)robotgo.KeyTap("i")robotgo.MilliSleep(50)robotgo.KeyTap("d")robotgo.MilliSleep(50)robotgo.KeyTap("o")robotgo.MilliSleep(50)robotgo.KeyTap("n")robotgo.MilliSleep(50)robotgo.KeyTap("g")robotgo.MilliSleep(50)robotgo.KeyTap("w")robotgo.MilliSleep(50)robotgo.KeyTap("u")robotgo.MilliSleep(50)robotgo.KeyTap("p")robotgo.MilliSleep(50)robotgo.KeyTap("i")robotgo.MilliSleep(50)robotgo.KeyTap("n")robotgo.MilliSleep(50)robotgo.KeyTap("space")robotgo.MilliSleep(50)robotgo.KeyTap("enter")robotgo.MilliSleep(50)time.Sleep(3 * time.Second)fmt.Printf("第一个图捡完物品")robotgo.MilliSleep(2000)robotgo.MoveClick(1377, 71, `left`, true)robotgo.MilliSleep(50)robotgo.MoveClick(1377, 71, `left`, true)robotgo.MilliSleep(50)robotgo.KeyTap("enter")robotgo.MilliSleep(50)robotgo.KeyTap("shift")robotgo.MilliSleep(50)robotgo.KeyTap("/")robotgo.MilliSleep(50)robotgo.KeyTap("/")robotgo.MilliSleep(50)robotgo.KeyTap("shift")robotgo.MilliSleep(50)robotgo.KeyTap("y")robotgo.MilliSleep(50)robotgo.KeyTap("i")robotgo.MilliSleep(50)robotgo.KeyTap("d")robotgo.MilliSleep(50)robotgo.KeyTap("o")robotgo.MilliSleep(50)robotgo.KeyTap("n")robotgo.MilliSleep(50)robotgo.KeyTap("g")robotgo.MilliSleep(50)robotgo.KeyTap("w")robotgo.MilliSleep(50)robotgo.KeyTap("u")robotgo.MilliSleep(50)robotgo.KeyTap("p")robotgo.MilliSleep(50)robotgo.KeyTap("i")robotgo.MilliSleep(50)robotgo.KeyTap("n")robotgo.MilliSleep(50)robotgo.KeyTap("space")robotgo.MilliSleep(50)robotgo.KeyTap("enter")robotgo.MilliSleep(50)time.Sleep(3 * time.Second)robotgo.MilliSleep(50)robotgo.MoveClick(10, 10, `left`, true)robotgo.MilliSleep(100)robotgo.KeyTap("esc")time.Sleep(1 * time.Second)robotgo.KeyTap("f10")robotgo.MilliSleep(50)robotgo.KeyTap("f10")time.Sleep(3 * time.Second)
}func randInt(min, max int) int {rand.Seed(time.Now().UnixNano())return rand.Intn(max-min+1) + min
}相关文章:

GO语言,半自动打怪
仅供学习参考,切勿用于商业用途 package mainimport ("fmt""github.com/go-vgo/robotgo""math/rand""time" )const (taskNum 7 )type Task struct {Name stringSleepTime1 intSleepTime2 intFunc func() }fu…...

【Java 进阶篇】Java登录案例详解
登录是Web应用程序中常见的功能,它允许用户提供凭证(通常是用户名和密码)以验证其身份。本文将详细介绍如何使用Java创建一个简单的登录功能,并解释登录的工作原理。我们将覆盖以下内容: 登录的基本概念创建一个简单的…...
Vue 菜单导航栏,轮播图
导航菜单栏结构和样式代码实现 一级导航栏 views/HomeView.vue <template><div><Shortcut></Shortcut><Header></Header><div class"inner"><Navigation></Navigation></div><div>我是主页&l…...

讲述为什么要学习Adobe XD以及 Adobe XD下载安装
首先 我们要了解 Adobe XD 是个什么东西 XD是Adobe公司专门开发出来面向交互、界面设计的矢量绘图工具。 然后是 他可以做什么? 最基本的 可以做UI界面设置 所有 手机 平板 电脑等设备的UI界面 我们都可以通过XD完成 还有就是原型设置 我们可以做各种界面图 还有…...
Http server: hello world)
Netty复习:(1)Http server: hello world
一、加依赖 <dependency><groupId>io.netty</groupId><artifactId>netty-all</artifactId><version>4.1.72.Final</version></dependency>二、创建自定义的handler package cn.edu.tju.handler;import io.netty.buffer.ByteB…...

【Python 千题 —— 基础篇】加法计算
题目描述 题目描述 编写一个程序,接受用户输入的两个数字,然后计算这两个数字的和,并输出结果。 输入描述 输入两个数字,用回车隔开两个数字。 输出描述 程序将计算这两个数字的和,并输出结果。 示例 示例 ① …...
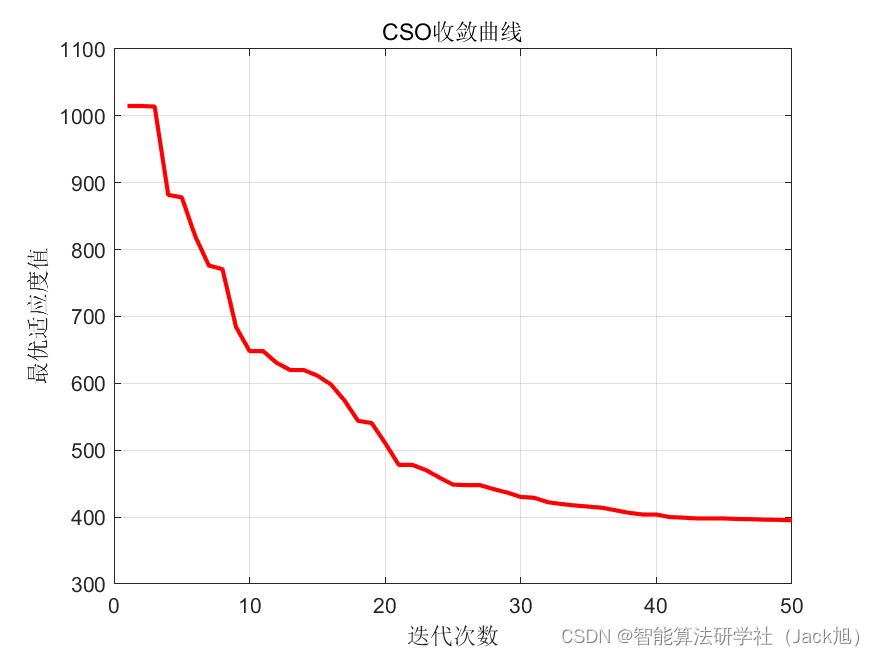
基于纵横交叉算法的无人机航迹规划-附代码
基于纵横交叉算法的无人机航迹规划 文章目录 基于纵横交叉算法的无人机航迹规划1.纵横交叉搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用纵横交叉算法来优化无人机航迹规划。 …...

D-Bus:数据类型
D-Bus中描述接口的属性和方法,有其自己定义的一套签名描述方式: 数据类型描述符号对应C++数据类型avector/array数组, ai表示的是vector<int32_t>bboolddouble双精度浮点数iint32_t,32位有符号整数nint16_t,16位有符号整数oobject_path对象路径quint16_t,16位无符号…...

BI零售数据分析,告别拖延症,及时掌握一线信息
在日常的零售数据分析中,经常会因为数据量太大,分析指标太多且计算组合多变而导致数据分析报表难产,零售运营决策被迫拖延症。随着BI数据可视化分析技术的发展,智能化、可视化、自助分析的BI数据分析逐渐成熟,形成一套…...
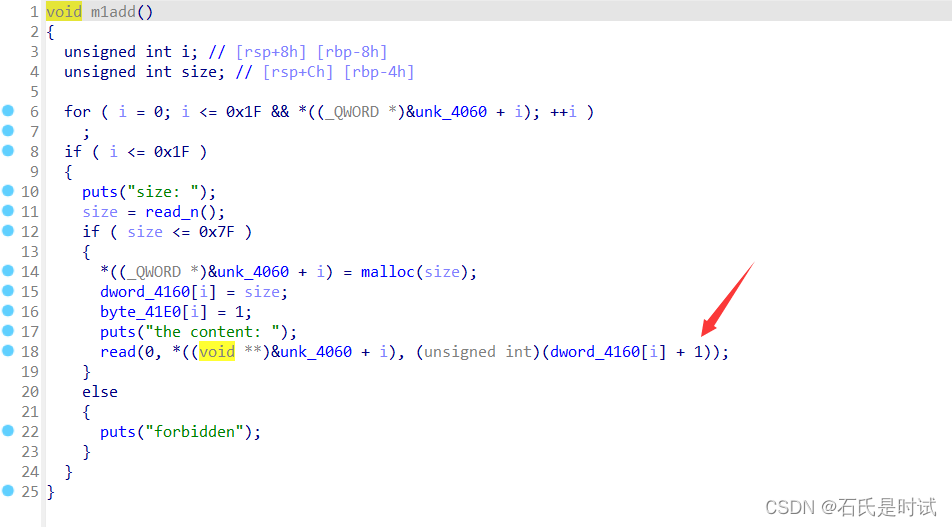
[BUUCTF NewStarCTF 2023 公开赛道] week4 crypto/pwn
再补完这个就基本上完了. crypto RSA Variation II Schmidt-Samoa密码系统看上去很像RSA,其中Npqq, 给的eN给了d from secret import flag from Crypto.Util.number import *p getPrime(1024) q getPrime(1024)N p*p*qd inverse(N, (p-1)*(q-1)//GCD(p-1, q-1))m bytes…...

论文范文:论基于架构的软件设计方法及应用
注意:范文只适用于帮助大家打开写作思路,并不能作为素材直接用于平时练习、考试中。考试中直接使用范文的素材,会有被认定为雷同卷的风险。 摘要: 2022年4月,本人所在单位计划研发生态集装箱管理控制平台项目。该平台主要用于与现有公司生态集装箱产品做对接,达到远程控制…...
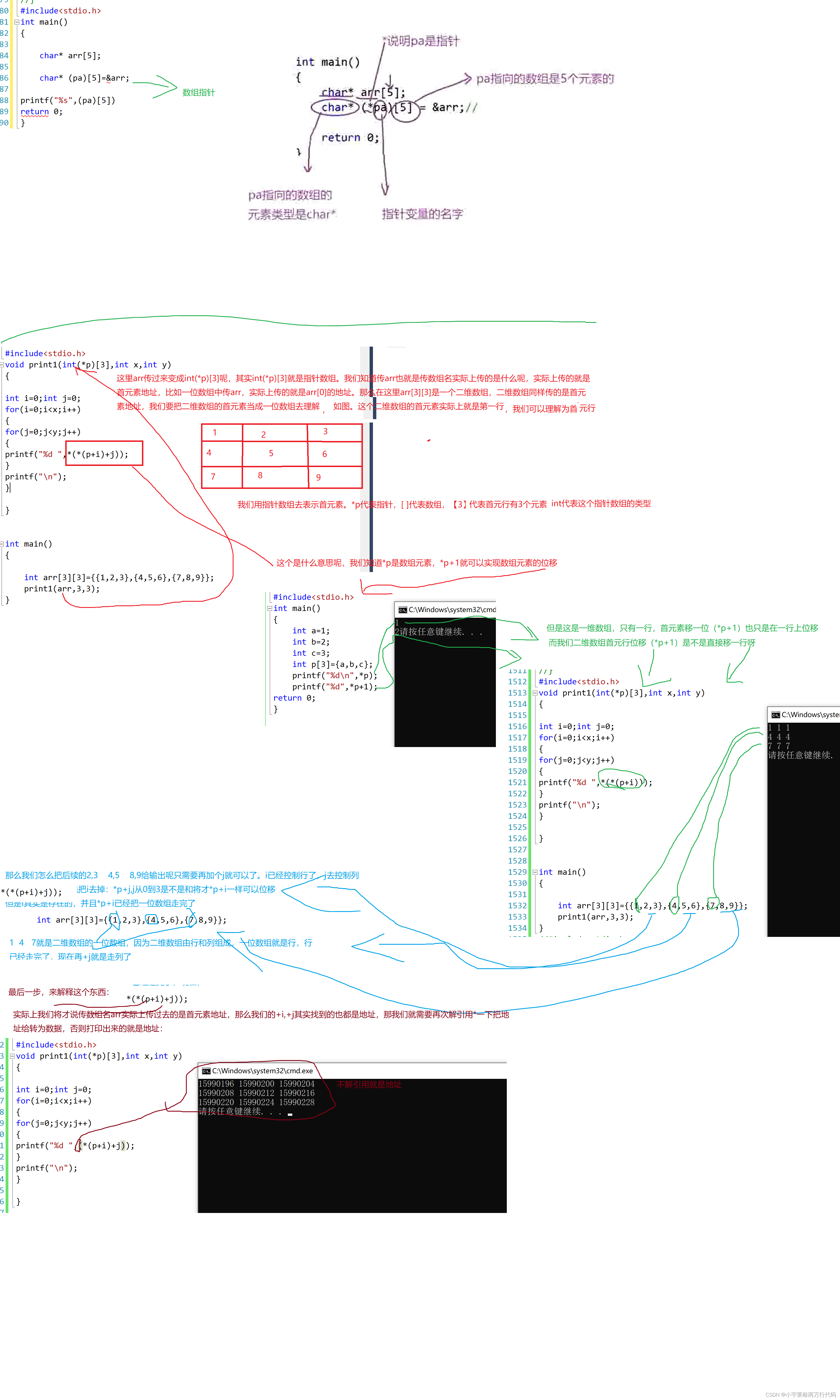
C语言 指针进阶笔记
p和*p: 如图,p是指针,指针存放着地址,打印出来应该是数组的值 *p是指针里里面的元素 #include<stdio.h> int main() {int a1;int b2;int c3;int p[3]{a,b,c};printf("%d",*p); return 0; } 那么现在的打印结果应该为数组的…...

数据库认证 | Oracle OCP好考吗
数据库对于很多技术人员来说都不陌生,但是你想深入了解的话,那么考个证书也许就是一个不错的选择。 如果能考个Oracle OCP认证的话,那也确实不错。那么Oracle OCP好考吗?下面我们就来了解一下吧。 01 Oracle OCP好考吗 OCP考试还…...
处理大数据的基础架构,OLTP和OLAP的区别,数据库与Hadoop、Spark、Hive和Flink大数据技术
处理大数据的基础架构,OLTP和OLAP的区别,数据库与Hadoop、Spark、Hive和Flink大数据技术 2022找工作是学历、能力和运气的超强结合体,遇到寒冬,大厂不招人,可能很多算法学生都得去找开发,测开 测开的话&am…...
解决计算机msvcp120.dll文件丢失的5种方法,亲测有效
在计算机使用过程中,我们经常会遇到一些错误提示,其中之一就是“msvcp120.dll丢失”。这个错误提示可能会给我们带来很大的困扰,影响我们的正常使用。本文将详细介绍msvcp120.dll丢失的原因、解决方法以及预防措施,帮助大家更好地…...

Python selenium交互
视频版教程:一天掌握python爬虫【基础篇】 涵盖 requests、beautifulsoup、selenium selenium可以模拟用户点击事件,以及控制浏览器前进,后退等操作。 下面是一个模拟百度搜索,点击下一页,控制浏览器后退,…...

基本微信小程序的体检预约小程序
项目介绍 我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,体检预约系统小程序被用户普遍使用,为方便用户…...

FHE 的高精度算术:BGV-big、BFV-big
参考文献: [NL11] Naehrig M, Lauter K, Vaikuntanathan V. Can homomorphic encryption be practical?[C]//Proceedings of the 3rd ACM workshop on Cloud computing security workshop. 2011: 113-124.[GC15] Geihs M, Cabarcas D. Efficient integer encoding…...

基于SpringBoot的在线笔记系统
技术介绍 🔥采用技术:SpringSpringMVCMyBatisJSPMaven 🔥开发语言:Java 🔥JDK版本:JDK1.8 🔥服务器:tomcat 🔥数据库:mysql 🔥数据库开发工具&…...
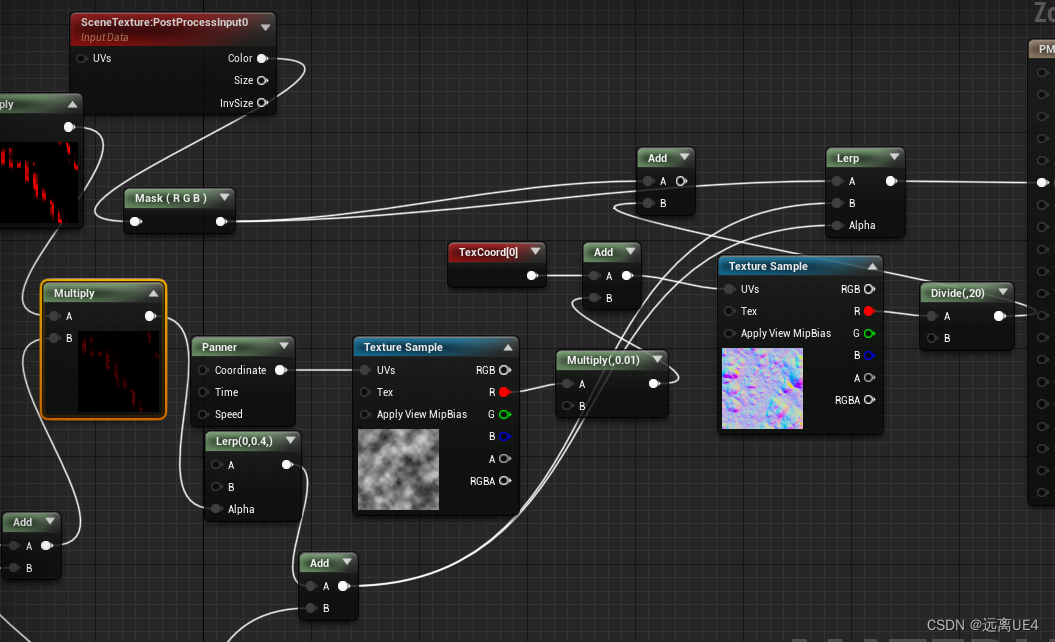
UE4 使用材质后期 制作玻璃有雨效果
效果展示,其实这是一个动画效果 以上为所有逻辑 拿到TexCoord给到Panner,Time和Speed都是通过下面计算而来,后面讲,再拿到时间和速度值过后,加上扰动值,最后取G值,因为雨事从上而下的动…...

OpenClaw技能扩展:GLM-4.7-Flash驱动Markdown文档自动整理
OpenClaw技能扩展:GLM-4.7-Flash驱动Markdown文档自动整理 1. 为什么需要文档自动化整理 作为一个长期使用Markdown写作的技术博主,我的文档目录早已变成了"数字坟场"。上周试图寻找半年前写的Docker网络配置笔记时,面对notes_20…...

基于GPT-5.4的本科毕业论文智能写作实战指南:从实验数据到完稿的全流程教程
摘要: 对于已完成实验并手握参考文献的大四学生而言,将 months of experiments 转化为符合学术规范的毕业论文往往是最具挑战性的环节。本教程系统介绍如何利用GPT-5.4这一先进的大语言模型,通过科学的提示词工程(Prompt Engineer…...

Tailwind CSS在Vue3+Vite项目中的实战应用:从零到响应式按钮
Tailwind CSS在Vue3Vite项目中的实战应用:从零到响应式按钮 如果你正在使用Vue3和Vite构建现代Web应用,却对传统CSS的维护成本感到头疼,那么Tailwind CSS可能会成为你的新宠。这个实用优先的CSS框架彻底改变了我们编写样式的方式——不再需要…...

从‘饱和度’到‘肤色正常’:深入理解CCM色彩校正矩阵的调试逻辑与参数关系
从‘饱和度’到‘肤色正常’:深入理解CCM色彩校正矩阵的调试逻辑与参数关系 在数字图像处理领域,色彩校正矩阵(Color Correction Matrix,CCM)的调试一直是工程师们面临的技术难点之一。不同于简单的参数调整࿰…...

从‘知识冲突’到‘对齐’:图解ProGrad如何让CLIP微调既专又通
ProGrad:用向量几何重新思考多模态模型的微调艺术 想象一下,你正在训练一位精通多国语言的老教授学习一门新方言。如果完全放任他自由发挥,可能会丢失原有的语言体系;如果限制太多,又无法适应新语境。这正是CLIP等预训…...

OpenClaw技能开发入门:基于nanobot定制个人自动化模块
OpenClaw技能开发入门:基于nanobot定制个人自动化模块 1. 为什么需要自定义OpenClaw技能? 去年夏天,当我第一次接触OpenClaw时,最让我惊喜的不是它预置的几十种技能,而是它允许开发者像搭积木一样自由扩展功能。作为…...
)
Harmonyos应用实例233:数独逻辑教练 (综合与实践)
5. 数独逻辑教练 (综合与实践) 功能介绍: 提供一个 4x4 或 6x6 的入门级数独游戏,专为训练逻辑推理设计。系统随机生成题目,用户点击格子填入数字。如果填入错误,系统会给予红色高亮提示。包含“提示”功能,自动填入一个正确数字,帮助学生理解排除法和唯一性原理。 //…...

AI芯片算力揭秘:从INT8到FP16,如何正确理解不同精度的TOPS值?
AI芯片算力揭秘:从INT8到FP16,如何正确理解不同精度的TOPS值? 当你在选购AI加速卡时,是否曾被厂商宣传的"200TOPS算力"搞得晕头转向?作为在边缘计算部署过数十个模型的工程师,我必须告诉你一个残…...

保姆级教程:在MounRiver Studio上为CH32V307配置FreeRTOS与LwIP网络栈
从零构建CH32V307物联网网关:FreeRTOS与LwIP全流程实战指南 当一块搭载RISC-V内核的CH32V307开发板遇上实时操作系统与轻量级TCP/IP协议栈,会碰撞出怎样的火花?本文将带你完整经历从开发环境搭建到网络功能验证的全过程。不同于简单的代码移植…...

Release It! 终极自动化发布工具:5分钟配置完整版本管理流程
Release It! 终极自动化发布工具:5分钟配置完整版本管理流程 【免费下载链接】release-it 🚀 Automate versioning and package publishing 项目地址: https://gitcode.com/gh_mirrors/re/release-it Release It! 是一款强大的自动化发布工具&…...