Apollo上机实践:一次对自动驾驶技术的亲身体验
上机实践
- 概述
- 自动驾驶通信
- 分布式系统开发模式
- 开发工具
- 自动驾驶感知
- 传感器特性
- 感知流程及算法
- 部署感知模型
- 自动驾驶决策规划
- 决策规划流程和算法
- 使用 Dreamview 进行控制在环的规划调试
- 开发规划场景和算法
- 福利活动
主页传送门:📀 传送
概述
Apollo 是一个非常庞大且复杂的系统,如何学习上手非常关键。我们一般把学习实践 Apollo 的过程分为上机和上车两个阶段。
我们首先从上机实践 Apollo 开始。上机只要你有符合配置要求的电脑(4 核以上 CPU,16G 以上内存,安装 Ubuntu 18.04+ 系统),能连上网就可以。在上机实践阶段,通过相应的实践内容与 Apollo 工具,开发者可以学习了解自动驾驶通信框架、自动驾驶感知以及自动驾驶决策规划等关心技术栈。
| 技术栈 | 通信框架 | 感知 | 决策规划 |
|---|---|---|---|
| Apollo 工具 | Cyber RT | DreamView / Cyber Visualizer | DreamView / Dreamland |
| 实践内容 | 1. 掌握 Cyber RT 开发工具 2. 使用 Cyber RT API 进行Apollo 开发 | 1.了解传感器特性 2.了解 Apollo 感知流程及算法 3.使用 Dreamview/Perception Visualizer 进行开发调试 4.扩展部署新的感知模型 5.扩展训练新的感知模型并验证 | 1. 了解 Apollo 决策规划流程和算法 2. 使用 Dreamview 进行控制在环的规划调试 3.基于Apollo 开发新的规划场景和算法4. 使用 Dreamland 进行控制在环的规划仿真评测 |
自动驾驶通信
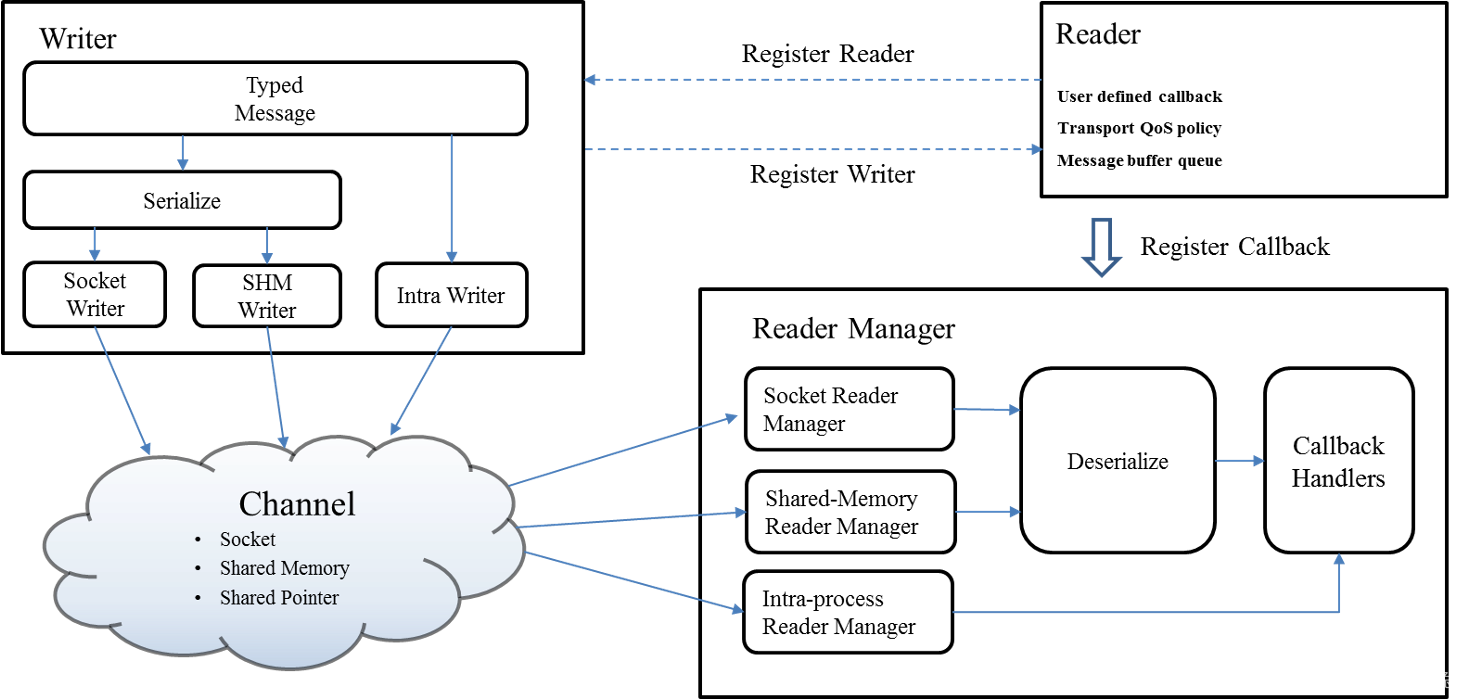
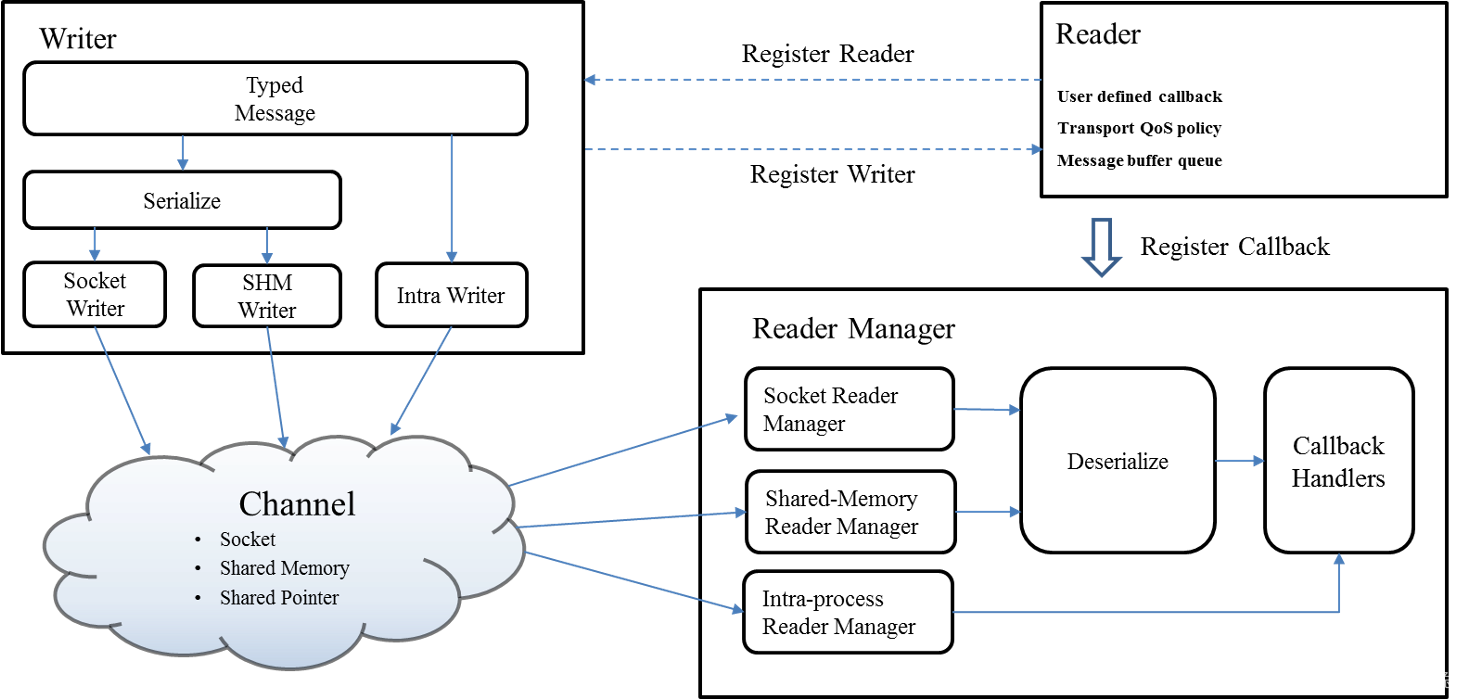
在 实时通信框架 Cyber RT 中我们了解到了 Cyber RT 的好处,接下来就是要了解如何使用 Cyber RT 学习掌握自动驾驶通信。Cyber RT是车端工程框架的基础,任何的扩展开发都离不开 Cyber RT。因而把 Cyber RT 学好也是能深入学习 Apollo 的前提。在 Cyber RT 的实践中主要包括 2 个任务。
分布式系统开发模式
首先是了解 Cyber RT 里的 Talker/Listener、Service/Client 以 Parameter Service 三种通信模式,并可以尝试从创建你的第一个 reader/writer 通信案例开始。关于自动驾驶通信的应用实践案例可以参考应用实践文档相关文档使用 Cyber RT 进行开发。
开发工具
其次需要掌握如Cyber Monitor,Cyber Visualizer,Cyber Recorder 等开发工具,提升你的开发调试效率。
自动驾驶感知
在学习实践了 Cyber RT 之后,对于感知技术栈感兴趣的开发者可以学习实践自动驾驶感知。感知一般也是开发者关注最多的技术栈之一。
传感器特性
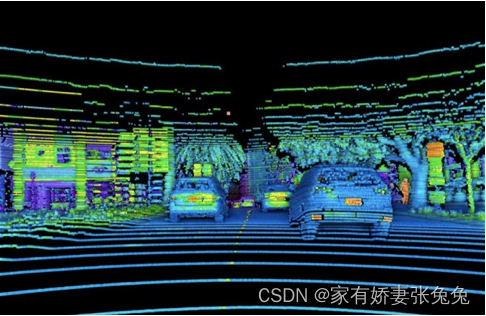
可以通过Apollo提供的传感器原始数据集和 Cyber Monitor、Cyber Visualizer 等工具,了解各个传感器数据特性。
感知流程及算法
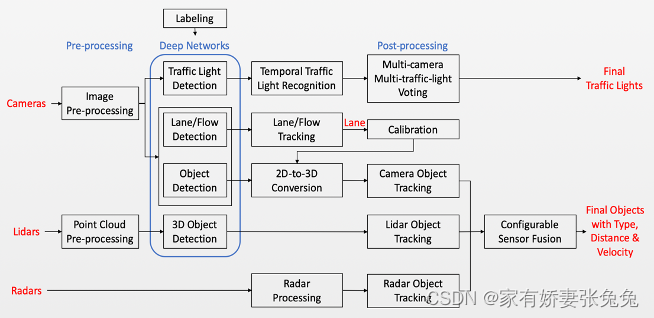
之后,可以逐步了解感知流程和算法,Apollo 提供了 Lidar 点云、单目等多模态,检测、分割等多任务的算法,学习时可以根据自己的兴趣点选择性的学习。这个过程中,可以通过 Apollo 提供的 DreamView/ Perception Visualizer 等各种可视化工具来直观了解感知数据处理流程。

部署感知模型
更进一步,你可以自己采集数据进行感知模型训练。Apollo 也会提供相关的模型验证工具链,来确保接入的效果。基于此,可以不断优化。
自动驾驶决策规划
上机实践中的第 3 个重要场景就是学习实践自动驾驶决策规划,这也是开发者关注最多的技术方向之一。
决策规划流程和算法
刚开始可以通过 Apollo 了解流程和算法。Apollo 提供基于场景的规划管理,适用高速、城市、低速园区等多场景,同时提供基于车道和开放空间的规划器。

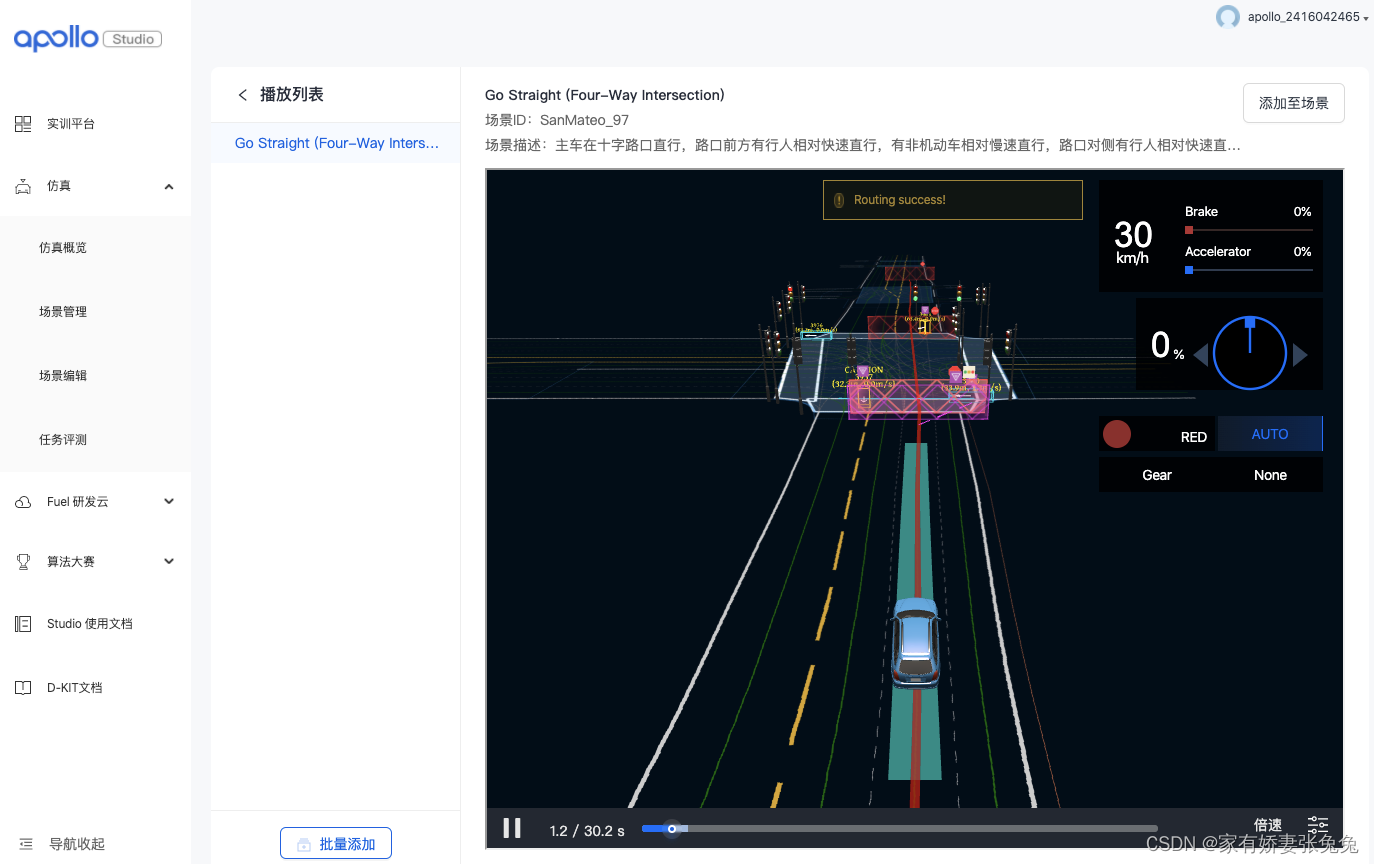
使用 Dreamview 进行控制在环的规划调试
在了解规划流程的基础上,可以从云端 Studio 仿真 下载已有场景或者通过 Studio 仿真 场景编辑器自定义场景到本地 DreamView 进行仿真调试,来进一步理解规划数据处理流程。
开发规划场景和算法
再进一步,当Apollo自带规划算法和场景无法满足你的需求时,你可以自主扩展。并使用 Studio 仿真 云端集群仿真服务来进行效果评测和回归测试。基于此,可以不断优化。
福利活动
加入课程

Apollo开发者社区 观看课程学习apollo
课程进度可以拖动 几秒就能完成。
学完填表选心仪的奖品领奖就行
表单填写
相关文章:
Apollo上机实践:一次对自动驾驶技术的亲身体验
上机实践 概述自动驾驶通信分布式系统开发模式开发工具 自动驾驶感知传感器特性感知流程及算法部署感知模型 自动驾驶决策规划决策规划流程和算法使用 Dreamview 进行控制在环的规划调试开发规划场景和算法 福利活动 主页传送门:📀 传送 概述 Apollo 是…...

QTcpServer简单的TCP服务器连接
1、简介 简单实现控制TCP服务器获取连接的套接字。点击断开服务器即可关闭所有连接,最大连接数量为5个。 声明源文件 #include "mainwindow.h"MainWindow::MainWindow(QWidget *parent): QMainWindow(parent) {//设置固定大小setFixedSize(1024,600);b…...
LeetCode热题100——双指针
双指针 1.移动零2.盛最多水的容器3.三数之和 1.移动零 给定一个数组 nums,编写一个函数将所有 0 移动到数组的末尾,同时保持非零元素的相对顺序。 // 题解:使用双指针,其中快指针指向非零元素,慢指针指向首个零元素下…...
Ubuntu ARMv8编译Qt源码以及QtCreator
最近需要在NVIDIA小盒子上面跑一个程序,一开始想着在Ubuntu x64下交叉编译一版,后来发现libqxcb.so 这个库在configure时就会一直报错,多方查找怀疑可能是由于硬件不支持在x64环境下编译AMR架构的xcb库。 所以最后在ARM下直接编译Qt源码了&am…...

虚机Centos忘记密码如何重置
1进入开机前的页面,选中第一个,按“e”键,进入编辑模式 2找到ro crashkernel项,将ro替换成 rw initsysroot/bin/sh 3 Ctrlx mount -o remount, rw / chroot /sysroot chroot /sysroot passwd root 输入两次密码 touch /.a…...

OpenGL_Learn02
1. 监听窗口,绑定回调函数 #include <glad/glad.h> #include <GLFW/glfw3.h> #include <iostream>void framebuffer_size_callback(GLFWwindow* window, int width, int height) {glViewport(0, 0, width, height);std::cout << "变了…...
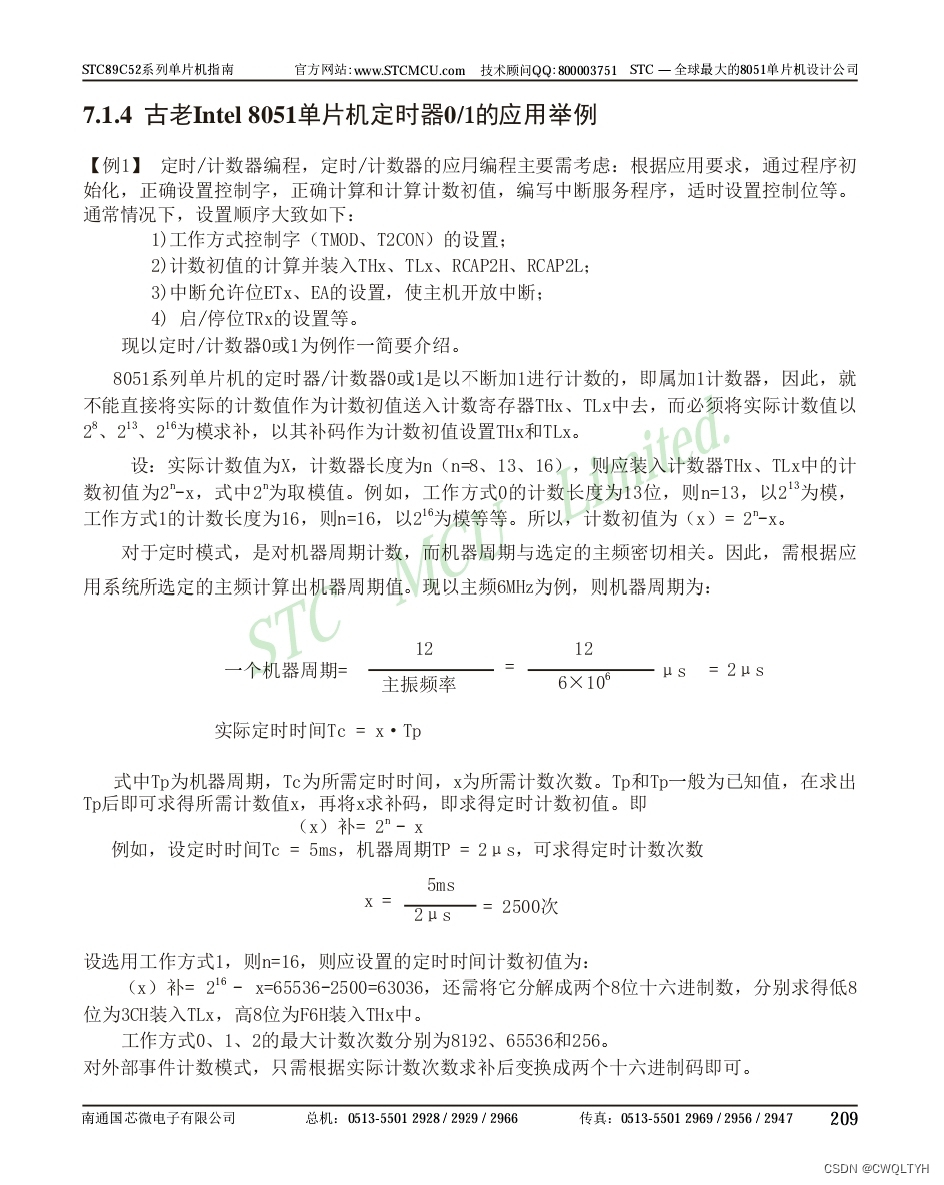
基于STC系列单片机实现外部中断0控制按键调节定时器0产生PWM(脉宽调制)的功能
#define uchar unsigned char//自定义无符号字符型为uchar #define uint unsigned int//自定义无符号整数型为uint sbit PwmOut P1^0;//位定义脉宽调制输出为单片机P1.0脚 uchar PwmTimeCount;//声明脉宽调制时间计数变量 uchar PwmDutyCycle;//声明脉宽调制占空比变量 void Ti…...

vue3中 reactive和ref的区别
在Vue 3中,reactive和ref都是用于响应式数据的API。它们的主要区别在于使用方式和返回值类型。 reactive: reactive函数用于将一个对象转换为响应式对象。它接收一个普通的JavaScript对象,并返回一个被代理的响应式对象。这意味着当响应式对…...
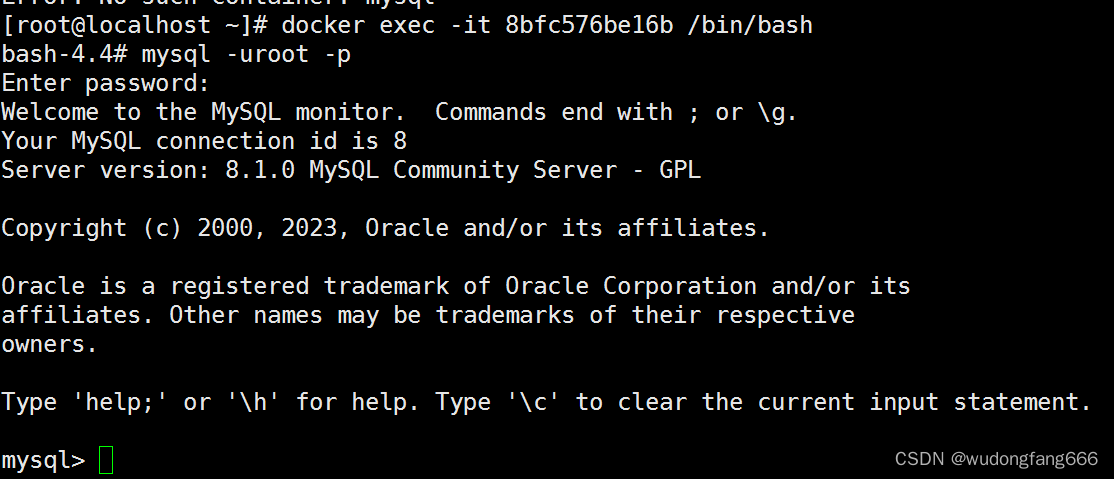
docker的安装部署nginx和mysql
小白自己整理,如有错误请指示! 自我理解:docker就是把应用程序所用的依赖程序,函数库等相关文件打包成镜像文件,类似系统光盘,然后可以在任意电脑上安装使用(方便运维人员部署程序)…...

测试C#调用Aplayer播放视频(1:加载Aplayer控件)
微信公众号“Dotnet跨平台”的文章《开源精品,使用 C# 开发的 KTV 点歌项目》中使用了迅雷开源APlayer播放引擎。最近在学习有哪些能拿来播放视频的组件或控件,于是准备试试,根据文章中的介绍,在迅雷APlayer播放引擎网站中下载了A…...

二叉树的遍历+二叉树的基本操作
文章目录 二叉树的操作一、 二叉树的存储1.二叉树的存储结构 二、 二叉树的基本操作1.前置创建一棵二叉树:1. 定义结点 2.简单的创建二叉树 2.二叉数的遍历1.前序遍历2.中序遍历3.后序遍历4.层序遍历 3.二叉树的操作1.获取树中节点的个数2.获取叶子节点的个数3.获取…...

Go 语言gin框架的web
节省时间与精力,更高效地打造稳定可靠的Web项目:基于Go语言和Gin框架的完善Web项目骨架。无需从零开始,直接利用这个骨架,快速搭建一个功能齐全、性能优异的Web应用。充分发挥Go语言和Gin框架的优势,轻松处理高并发、大…...

Docker底层原理:Cgroup V2的使用
文章目录 检查 cgroup2 文件系统是否已加载检查系统是否已挂载 cgroup2 文件系统创建 cgroup2 层次结构查看 cgroup2 开启的资源控制类型启用 cgroup2 资源控制设置 cgroup2 资源限制加入进程到 cgroup2 检查 cgroup2 文件系统是否已加载 cat /proc/filesystems | grep cgroup…...
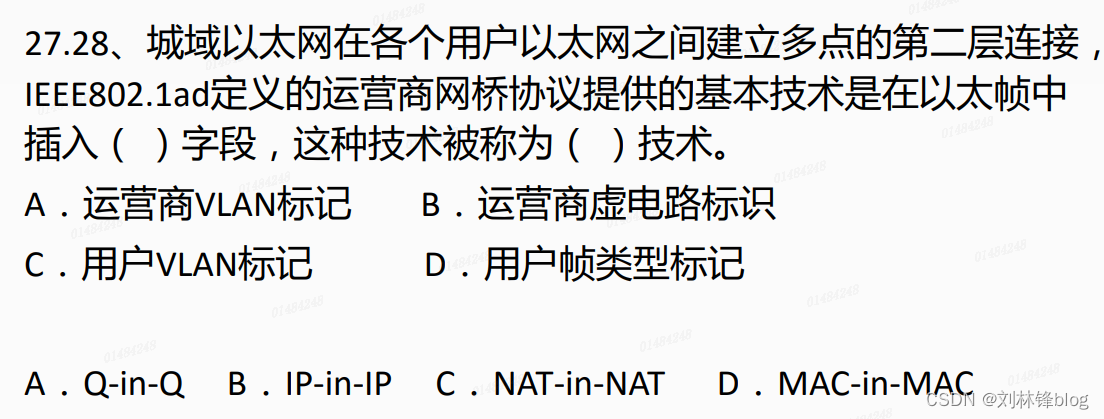
历年上午真题笔记(2014年)
解析:A 网络设计的三层模型 : 接入层:Layer 2 Switching,最终用户被许可接入网络的点,用户通过接入层可以访问网络设备。 汇聚层:Layer2/3 Switching,访问层设备的汇聚点,负责汇接配线单元,利用二、三层技术实现工作组分段及网络故障的隔离,以免对核心层网络设备造…...
数据库软考知识
分布式数据库透明性 封锁 加上共享锁之后只能加共享锁,加上排他锁之后,啥锁都不能加。 分布式数据库特性 伪传递定理 SQL函数定义,有点冷 来了奥,更冷 存储过程 很重要,下午第二大题也是数据库...
学习笔记|配对样本均数T检验|SPSS常用的快捷键|规范表达|《小白爱上SPSS》课程:SPSS第六讲 | 配对样本均数T检验
目录 学习目的软件版本原始文档配对样本均数T检验一、实战案例二、案例解析三、统计策略四、SPSS操作1、正态性检验2、配对样本T检验 五、结果解读六、规范报告1、规范表格2、规范文字 划重点Tips:SPSS常用的快捷键 学习目的 SPSS第六讲 | 配对样本均数T检验 软件版本 IBM S…...

python内置模块smtplib、email 发送电子邮件
一、简介 smtplib 是 Python 的标准库之一,用于发送电子邮件。它提供了一个简单的接口来连接到 SMTP(Simple Mail Transfer Protocol)服务器,并通过该服务器发送电子邮件。 email 是 Python 的标准库之一,用于处理电子…...

Qt使用QWebEngineView一些记录
1.关闭软件警告: Release of profile requested but WebEnginePage still not deleted. Expect troubles! 原因,系统退出关闭view,没有释放page。 解决办法:手动释放page 顺便把view也释放了。 Widget::~Widget() {updateIni…...

【2023.10.30练习】C语言-判断等式成立
计算机能力挑战初赛2020.20题 题目描述: 输入正整数A、B、C(0<A,B,C<10000),若用、-、*、/、%之一组成等式(即ABC,是上述运算符之一,),则输出“YES”,否则输出“NO”; 输入: 第一行输入…...
Wpf 使用 Prism 实战开发Day03
一.实现左侧菜单绑定 效果图: 1.首先需要在项目中创建 mvvm 的架构模式 创建 Models ,放置实体类。 实体类需要继承自Prism 框架的 BindableBase,目的是让实体类支持数据的动态变更! 例如: 系统导航菜单实体类 / <summary>/// 系统导航菜单实体类…...

C语言核心知识体系总结
C语言核心知识体系总结本文旨在系统梳理C语言的基础与进阶知识点,帮助读者建立清晰的知识框架。内容涵盖:程序编译过程、数据类型与变量、运算符与表达式、控制结构、函数、指针、结构体与共用体、动态内存分配、文件操作等。适合复习巩固或查漏补缺。第…...

DRAM计算内存的电源传输网络优化策略
1. DRAM计算内存中的电源传输网络挑战与优化在数据密集型应用爆炸式增长的今天,传统冯诺依曼架构面临严峻的"内存墙"挑战。计算内存(Compute-in-Memory, CIM)技术通过在内存内部执行计算任务,从根本上改变了数据处理范式…...
)
从‘Hello World’到打开PRT文件:一个完整的NX C++外部exe开发入门实战(VS2015 + NX12)
从‘Hello World’到打开PRT文件:一个完整的NX C外部exe开发入门实战(VS2015 NX12) 在工业设计领域,NX(原Unigraphics)作为一款功能强大的CAD/CAM/CAE软件,其二次开发能力为工程师提供了极大的…...

别再只盯着密钥了!深入ESP32 eFuse,看懂flash加密背后的硬件安全逻辑
别再只盯着密钥了!深入ESP32 eFuse,看懂flash加密背后的硬件安全逻辑 当你在ESP32项目中使用flash加密功能时,是否曾疑惑过:为什么简单地烧录几个eFuse位就能实现固件保护?那些看似神秘的DISABLE_DL_DECRYPT、FLASH_CR…...

设计师连夜删稿的真相:Onion Skin未启用导致版本错位!3分钟紧急修复+历史帧自动锚定脚本
更多请点击: https://intelliparadigm.com 第一章:设计师连夜删稿的真相:Onion Skin未启用导致版本错位!3分钟紧急修复历史帧自动锚定脚本 当动画师在 Toon Boom Harmony 或 Adobe Animate 中反复导出“看似正确”的中间帧&#…...

收藏!小白程序员快速入门大模型:多模态LLMs学习指南
多模态大模型(MLLMs)通过整合图像、文本、语音等,实现跨模态理解和生成。文章介绍了MLLMs的基本概念、架构,包括多模态编码器、连接器与LLM,并区分了双编码器架构和基于LLM的架构。同时,文章探讨了VLM前沿动…...

基于SpringBoot的B2C生鲜电商平台毕设源码
博主介绍:✌ 专注于Java,python,✌关注✌私信我✌具体的问题,我会尽力帮助你。一、研究目的本研究旨在构建一个基于Spring Boot与Vue框架的B2C生鲜电商平台以解决当前生鲜电商领域存在的核心问题包括供应链管理效率低下导致的商品损耗率居高不下用户端体…...

【机器学习】Stacking模型融合:从原理到实战的进阶指南
1. 为什么需要Stacking模型融合? 当你用单一模型处理复杂数据时,经常会遇到这样的困境:线性回归对非线性关系束手无策,决策树容易过拟合,神经网络需要大量调参。我在去年参加Kaggle房价预测比赛时就深有体会——当时用…...

Android HWASan 详解:硬件标记原理、Clang 启用与排障实践
Android HWASan 详解:硬件标记原理、Clang 启用与排障实践 HWASan(Hardware-assisted AddressSanitizer)是面向 AArch64 的一类 Native(C/C)内存错误检测机制:利用指针与内存区域上的 短标签(T…...

AC鸭的温度墙
题目描述AC鸭在实验室里看到了一面很长的温度墙,这面墙从左到右一共有 n 个位置。一开始,每个位置的温度都是 0。接下来 AC鸭会进行 m 次加热操作。每次操作给出 l,r,v表示把第l个位置到第r个位置的温度都加上上v。所有操作结束后,AC鸭想知道…...